水下机器人推进器PID参数整定与MATLAB仿真
news2026/2/12 3:18:35
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2313495.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

在本地部署DeepSeek等大模型时,需警惕的潜在安全风险
在本地部署DeepSeek等大模型时,尽管数据存储在本地环境(而非云端),但仍需警惕以下潜在安全风险:
1. 模型与数据存储风险
未加密的存储介质:若训练数据、模型权重或日志以明文形式存储,可能被物…

【redis】string类型相关操作:SET、GET、MSET、MGET、SETNX、SETEX、PSETEX
文章目录 二进制存储编码转换SET 和 GETSETGET MSET 和 MGETSETNX、SETEX 和 PSETEX Redis 所有的 key 都是字符串,value 的类型是存在差异的 二进制存储
Redis 中的字符串,直接就是按照二进制数据的方式存储的
不仅仅可以存储文本数据,还可…

GaussDB安全配置指南:从认证到防御的全方面防护
一、引言
随着企业数据规模的扩大和云端化进程加速,数据库安全性成为运维的核心挑战之一。GaussDB作为一款高性能分布式数据库,提供了丰富的安全功能。本文将从 认证机制、权限控制、数据加密、审计日志 等维度,系统性地讲解如何加固 Ga…

Ubuntu20.04搭建gerrit code review
一、环境准备
1. 安装 Java 环境
Gerrit 依赖 Java 运行环境(推荐 JDK 8):
sudo apt install openjdk-11-jdk 验证安装:
java -version 2. 安装 Git
sudo apt install git 3. 可选依赖
数据库:Gerrit …

MacOS安装FFmpeg和FFprobe
按照网上很多教程安装,结果都失败了,后来才发现是路径问题,其实安装过程很简单(无奈) 第一步: 在官网下载 打开页面后,可以看到FFmpeg、FFprobe、FFplay和FFserver的下载图标 第二步࿱…

Redis7系列:设置开机自启
前面的文章讲了Redis和Redis Stack的安装,随着服务器的重启,导致Redis 客户端无法连接。原来的是Redis没有配置开机自启。此文记录一下如何配置开机自启。
1、修改配置文件
前面的Redis和Redis Stack的安装的文章中已经讲了redis.config的配置…

SpringAI介绍及本地模型使用方法
博客原文地址
前言
Spring在Java语言中一直稳居高位,与AI的洪流碰撞后也产生了一些有趣的”化学反应“,当然你要非要说碰撞属于物理反应也可以,
在经历了一系列复杂的反应方程后,Spring家族的新成员——SpringAI,就…

Unity 基础知识总结(持续更新中...)
引擎基础
Unity有哪几个主要窗口? Scene窗口 用于场景搭建和UI界面拼接 Game窗口 游戏运行预览 Hierarchy窗口 查看和调整场景对象层级结构 Project窗口 游戏工程资源 Inspector创建 属性查看器,属性设置、脚本组件挂载
Unity提供了几种光源…
![IDEA接入阿里云百炼中免费的通义千问[2025版]](https://i-blog.csdnimg.cn/direct/3468268ccc8f49518e932f33d2bc8681.png)
IDEA接入阿里云百炼中免费的通义千问[2025版]
安装deepseek
上一篇文章IDEA安装deepseek最新教程2025中说明了怎么用idea安装codeGPT插件,并接入DeepSeek,无奈接入的官方api已经不能使用了,所以我们尝试从其他地方接入
阿里云百炼https://bailian.console.aliyun.com/ 阿里云百炼是阿…

3.03-3.09 Web3 游戏周报:Sunflower Land 周留存率 74.2%,谁是本周最稳链游?
回顾上周的区块链游戏概况,查看 Footprint Analytics 与 ABGA 最新发布的数据报告。
【3.03–3.09】Web3 游戏行业动态
Sui 背后开发公司 Mysten Labs 宣布收购游戏开发平台 ParasolYescoin 创始人因合伙人纠纷被警方带走,案件升级为刑事案件Animoca B…
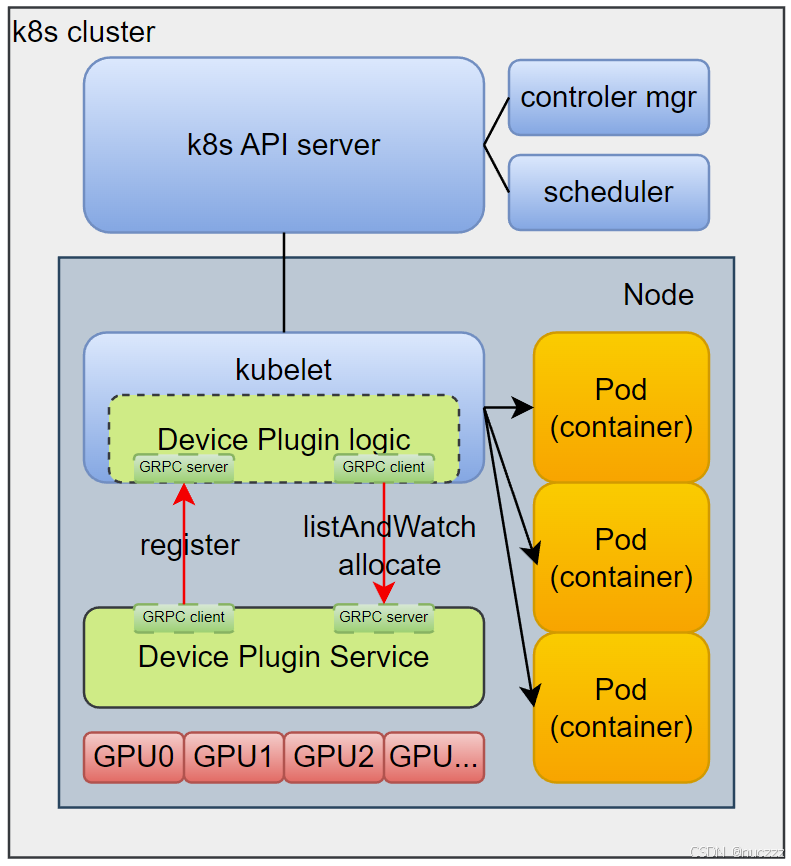
NVIDIA k8s-device-plugin源码分析与安装部署
在《kubernetes Device Plugin原理与源码分析》一文中,我们从源码层面了解了kubelet侧关于device plugin逻辑的实现逻辑,本文以nvidia管理GPU的开源github项目k8s-device-plugin为例,来看看设备插件侧的实现示例。
一、Kubernetes Device Pl…

langChainv0.3学习笔记(初级篇)
LangChain自0.1版本发布以来,已经历了显著的进化,特别是向AI时代的适应性提升。在0.1版本中,LangChain主要聚焦于提供基本的链式操作和工具集成,帮助开发者构建简单的语言模型应用。该版本适用于处理简单任务,但在应对…

聚焦两会:科技与发展并进,赛逸展2025成创新新舞台
在十四届全国人大三次会议和全国政协十四届三次会议期间,代表委员们围绕多个关键议题展开深入讨论,为国家未来发展谋篇布局。其中,技术竞争加剧与经济转型需求成为两会焦点,将在首都北京举办的2025第七届亚洲消费电子技术贸易展&a…

Ubuntu 24.04 安装与配置 JetBrains Toolbox 指南
📌 1. JetBrains Toolbox 介绍
JetBrains Toolbox 是 JetBrains 开发的工具管理器,可用于安装、更新和管理 IntelliJ IDEA、PyCharm、WebStorm、CLion 等。本指南记录了 JetBrains Toolbox 在 Ubuntu 24.04 上的 安装、路径调整、权限管理 及 遇到的问题…

【AI】神经网络|机器学习——图解Transformer(完整版)
Transformer是一种基于注意力机制的序列模型,最初由Google的研究团队提出并应用于机器翻译任务。与传统的循环神经网络(RNN)和卷积神经网络(CNN)不同,Transformer仅使用自注意力机制(self-attention)来处理输入序列和输出序列,因此可以并行计算,极大地提高了计算效率…

【VUE2】第二期——生命周期及工程化
目录
1 生命周期
1.1 介绍
1.2 钩子
2 可视化图表库
3 脚手架Vue CLI
3.1 使用步骤
3.2 项目目录介绍
3.3 main.js入口文件代码介绍
4 组件化开发
4.1 组件
4.2 普通组件注册
4.2.1 局部注册
4.2.2 全局注册 1 生命周期
1.1 介绍
Vue生命周期:就是…

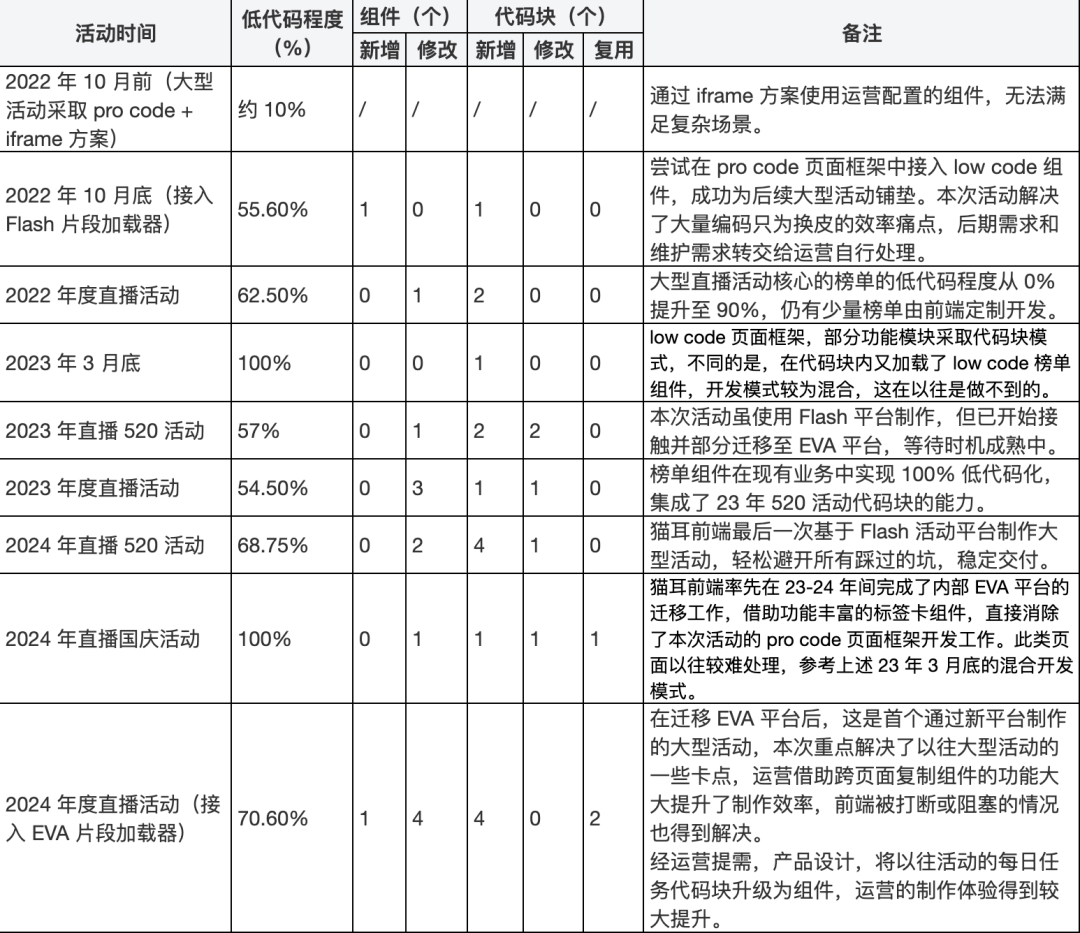
猫耳大型活动提效——组件低代码化
1. 引言 猫耳前端在开发活动的过程中,经历过传统的 pro code 阶段,即活动页面完全由前端开发编码实现,直到 2020 年接入公司内部的低代码活动平台,满足了大部分日常活动的需求,运营可自主配置活动并上线,释…

机器学习 Day02,matplotlib库绘图
1.matplotlib图像结构
容器层:画板,画布,坐标系辅助层:刻度,标题,网格,图例等图像层:折线图(主讲),饼图,直方图,柱状图等…

MySQL中有哪几种锁?
大家好,我是锋哥。今天分享关于【MySQL中有哪几种锁?】面试题。希望对大家有帮助; MySQL中有哪几种锁?
1000道 互联网大厂Java工程师 精选面试题-Java资源分享网
在 MySQL 中,锁是用于确保数据的一致性和并发控制的机…