软体机器人因其出色的可变形性和高适应性受到了广泛关注,这些特性使其在医疗、救援、探测等复杂场景中展现出独特的优势和巨大的应用潜力。研究人员对软体机器人的设计方法、材料与驱动技术、感知与控制策略等方面进行深入研究,取得了一系列成果。
本文汇总了10项软体机器人领域的优秀研究成果,并介绍了不同成果的研究亮点。在下述研究中,NOKOV度量动作捕捉系统通过实时记录机器人的运动过程、获取高精度空间定位,为实验提供了关键数据信息,帮助研究人员优化软体机器人的结构设计和运动控制。
新型软体机器人的设计方法
1.许多软体机器人的设计借鉴了生物结构和运动模式,例如华南理工大学周奕彤老师研究团队受蝠鲼的灵活扑翼启发,提出一款高效多模态软体游泳机器人。其采用由McKibben人造肌肉驱动的双稳态扑翼设计,最高游泳速度可达每秒12.23厘米,最大转弯角速度为每秒22.5度,同时可实现前后平移、转弯和翻转多模态游动。实验通过NOKOV度量动作捕捉系统记录机器人在不同驱动条件下的实时运动速度,助力优化机器人的性能和设计。
参考文献
Z. Xu, J. Liang, Y. Zhou, “Manta Ray-Inspired Soft Robotic Swimmer for High-speed and Multi-modal Swimming,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024).
IROS 2024 | 会转身和翻转的仿蝠鲼软体游泳机器人
2.为进一步提高软体机器人的灵活性和可扩展性,将软体机器人的功能单元设计成独立模块,通过不同模块的组合实现多样化的功能和形态变化。浙江工业大学鲍官军老师研究团队研制了一种新型的快速超长行程柔性驱动器,相关研究成果以“A Modular Soft Pipe-Climbing Robot with High Maneuverability”为题发表在 中科院一区TOP期刊《IEEE/ASM Transactions on Mechatronics》。该研究采用模块化设计,以三个柔性驱动器为组合,开发了适用于复杂管道内部作业的柔性爬管机器人。这款机器人本体横截面占用率相当小(仅0.2),其承受的管道内流体阻力较低,可以适应各种复杂的流体条件,如水平和垂直的直管,以及直径不同的弯管,在有负载和无负载的情况下,在静态和动态水流中工作。此外,该机器人的重量仅为 50 克,由于触手反应迅速,身体伸长率大,因此爬行速度快(空载条件下 15.0 mm/s),承载能力大(1500 克)。实验通过 NOKOV度量动作捕捉系统记录了机器人触手在不同气压下的屈曲过程,帮助有效控制触手运动,降低爬行失败的风险。
参考文献
W. Wang et al., “A Modular Soft Pipe-Climbing Robot With High Maneuverability,” in IEEE/ASME Transactions on Mechatronics, vol. 29, no. 6, pp. 4734-4743, Dec. 2024, doi: 10.1109/TMECH.2024.3385506.
3.张拉整体机器人作为一种新型机器人受到越来越多的关注。张拉整体结构通常指的是由连续的柔性缆线连接的非连续刚性杆构成的结构,与传统刚性结构相比,张拉整体结构具有多种特性,包括高灵活性、高适应性、可调刚度、优越的强度-质量比、高冗余度、出色的驱动效率和全局力分布。
北京理工大学方浩老师研究团队针对两种张拉整体机器人的跳跃过程进行了建模,同时详细分析了其自恢复特性。实验通过NOKOV度量动作捕捉系统记录了机器人跳跃实验中的运动过程,结果表明与传统张拉整体机器人相比,这两种机器人具有优越的跳跃和前进能力。
张拉整体机器人跳跃实验
参考文献
Jixue Mo, Hao Fang, Qingkai Yang, Design and locomotion characteristic analysis of two kinds of tensegrity hopping robots, iScience, Volume 27, Issue 3, 2024, 109226, ISSN 2589-0042, https://doi.org/10.1016/j.isci.2024.109226.
软体机器人的材料与驱动技术
4.为了实现软体机器人的快速响应和更广泛的适应性,往往需要将材料与驱动技术进行集成优化设计,例如使用双稳态复合材料实现的跳跃机制,通过重塑复合材料内部的机械预应变源和施加气动压力,从而允许更自由的平衡形状设计和更快速的运动状态转换。受双稳态复合材料的启发,华南理工大学周奕彤老师研究团队先后提出气动驱动的双稳态软体致动器和预应力软体螺旋致动器。通过NOKOV度量动作捕捉系统获取致动器表面标记点的定位,评估准静态条件下双稳态致动器形状与气动压力的关系。

参考文献
Zhou, Y., and Xu, Z. (July 20, 2023). “Mechanically Prestressed Pneumatically Driven Bistable Soft Actuators.” ASME. J. Mechanisms Robotics. May 2024; 16(5): 051006. https://doi.org/10.1115/1.4062949.
5.周奕彤老师研究团队所提出的软体螺旋致动器设计增加了物体和软体致动器之间的形状匹配区域,大大提高了抓取性能。实验测试了多种可变曲率同时可预测其致动响应的螺旋致动器,通过NOKOV度量动作捕捉系统获取执行器平面中心线,确定关键参数对执行器相应的影响。研究团队利用四个螺旋致动器开发了一种仿生被动动态抓手,实验评估其最大有效载荷为26.56N。此外,集成到无人机上的抓手能够栖息在真实的树枝上并捕获猎物模型。
软体螺旋致动器
参考文献
Z. Xu, J. Liang and Y. Zhou, “Soft Pneumatic Helical Actuators With Programmable Variable Curvatures,” in IEEE Robotics and Automation Letters, vol. 9, no. 7, pp. 6632-6639, July 2024, doi: 10.1109/LRA.2024.3410165.
6.形状记忆合金能够在温度变化时恢复特定形状,从而带动软体机器人的相应部位产生变形。汕头大学杨楠老师研究团队利用形状记忆合金驱动展开人工肌肉结构,这种结构在温度变化下产生拉力和推力,通过改变多个单元的排列方式可以产生可编码的力响应。
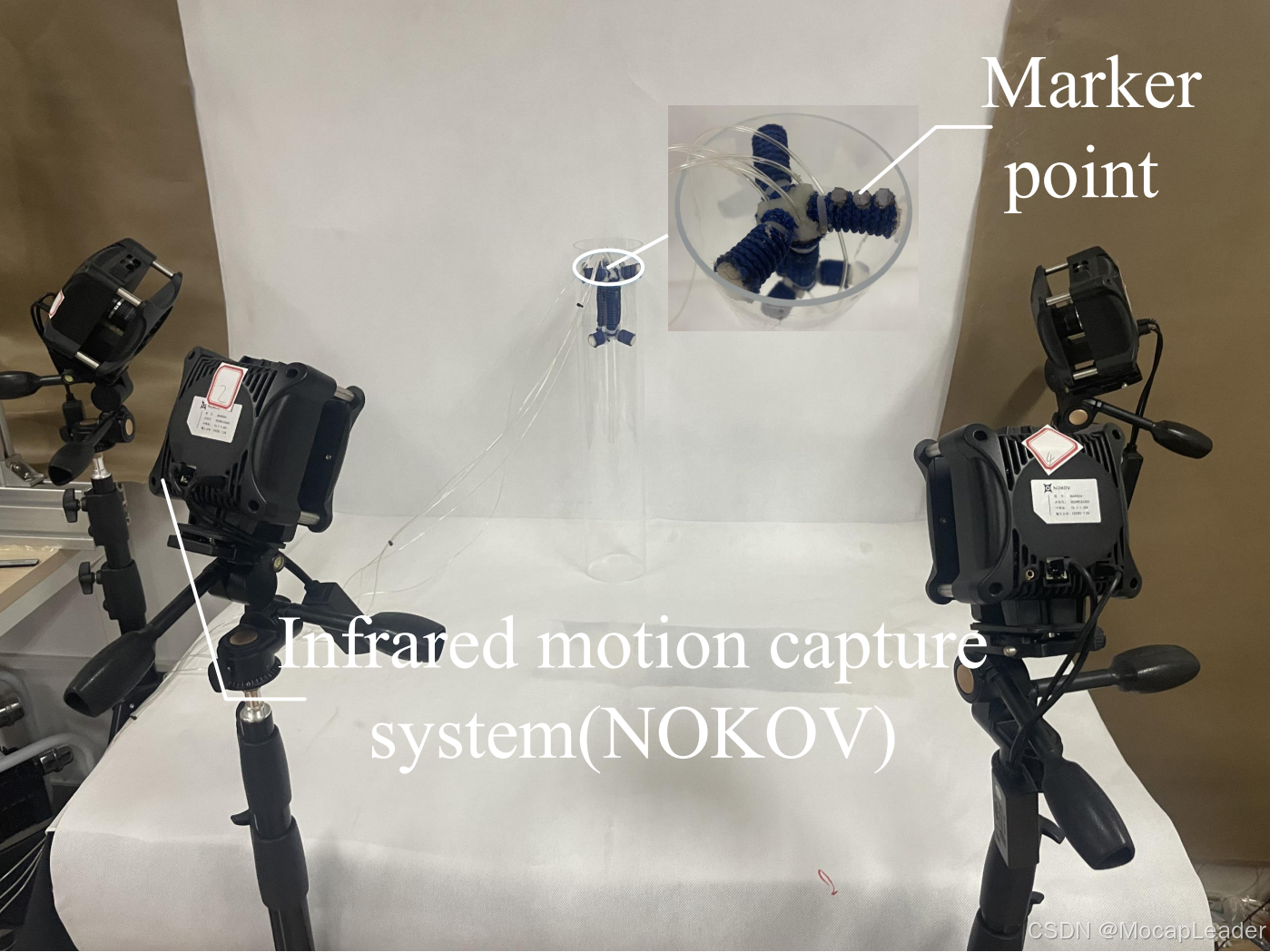
实验中,在结构的A、D、E、E’点位共附着有四个反光标识点,利用六个NOKOV度量动作捕捉镜头跟踪各点的实时空间位置,同时计算不同条件下距离AD及角度∠EDE’,并比较模型分析结果与动作捕捉系统实测结果。NOKOV度量动作捕捉系统的坐标精度可以达到亚毫米级,角度测量精度可以达到0.1°,可以准确获取结构变形过程中的状态数据。

研究人员还利用这种人工肌肉结构制作了一条机械臂,在末端固定了10g负载,通过加热使结构收缩/伸展抬升负载,分别测试了结构的拉力和推力。
参考文献
Yang, N., Deng, Y., Niu 2100493, X., Deployable-Structure-BasedArtificial Muscles Generating Coded Forces. Adv. Mater. Technol. 2021, 6, 2100493. https://doi.org/10.1002/admt.202100493.
软体机器人的感知和控制策略
7.视觉触觉传感是一种新兴的方法,利用现代成像技术追踪软介质的变形,以提高感测分辨率。南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队在机器人顶刊IEEE T-RO上以“Proprioceptive State Estimation for Amphibious Tactile Sensing”为题发表论文,提出了一种基于视觉的本体感知方法,通过结合内置的高帧率相机和软手指的体积离散化模型,能够实时且高保真地估计软体机器人手指的状态。NOKOV度量动作捕捉系统及外部触觉设备验证了所提出方法的精度,结果表明该精度目前处于行业领先。
参考文献
N. Guo et al., “Proprioceptive State Estimation for Amphibious Tactile Sensing,” in IEEE Transactions on Robotics, vol. 40, pp. 4684-4698, 2024, doi:10.1109/TRO.2024.3463509.
IEEE T-RO | 软手指状态估计实现两栖触觉传感 南方科技大学万芳老师团队
8.连续体机器人拥有无限自由度,为执行空间探索等任务提供了灵活性和适应性,但随着自由度的增加,连续体机器人的复杂性和运动规划难度也随之增加。南方科技大学孟庆虎院士团队对此进行了深入研究,提出⼀种为连续体机器人量身定制的基于 RRT* 的运动控制方法。实验使用两段式电缆驱动软体(连续体)机器人对所提方法的效果进行验证。通过NOKOV度量动作捕捉系统跟踪机器人的底座、近端节段顶端和远端节段末端的位置,以及机器人在预定路径上航行时的位置和相关动作。这些记录数据揭示了机器人实际位置与预测位置之间的差异,为了解机器人的配置提供了依据。
参考文献
P. Luo, S. Yao, Y. Yue, J. Wang, H. Yan and M. Q. . -H. Meng, "Efficient RRT-based Safety-Constrained Motion Planning for Continuum Robots in Dynamic Environments," 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 9328-9334, doi: 10.1109/ICRA57147.2024.10610309.
ICRA2024:基于RRT*方法的连续体机器人动态环境轨迹规划
9.考虑到连续体机器人在运动过程中复杂的非线性变形,天津大学康荣杰老师研究团队构建了一种连续体机器人的自适应集中质量动态模型,利用NOKOV度量动作捕捉系统获取连续体机器人尖端的空间定位,通过一系列实验验证了不同控制方案的性能,结果显示使用自适应动态参数可以实现更精确的前馈补偿。研究提出的动态模型适用于实时控制,并考虑了连续机器人的运动状态(即位置和速度)对其动态性能的影响。未来的工作将环境交互纳入建模和控制过程中,以扩展所提出方法的应用范围。
天津大学连续体机器人控制
参考文献
Xu Zhang, Chenghao Yang, Zhibin Song, Mojtaba A. Khanesar, David T Branson, Jian S. Dai, Rongjie Kang, An adaptive lumped-mass dynamic model and its control application for continuum robots, Mechanism and Machine Theory, Volume 201, 2024, 105736, ISSN 0094-114X, https://doi.org/10.1016/j.mechmachtheory.2024.105736.
10.吉林大学冯美老师研究团队从力平衡的角度,提出了一种具有恒定曲率的柔性手术器械的结构,可以快速精确响应指令,满足实时手术的主从控制要求。为了验证该柔性手术器械在精细操作下的性能,研究人员进行了原型机实验验证。实验中采用NOKOV度量动作捕捉系统实时获取主手(医生控制)和从动手术器械的运动轨迹信息作为实验结果,将反光标记点分别固定在主手和器械的末端执行器上,通过对比两条轨迹重合度来验证系统性能,实验结果证明了该手术器械机构可以很好地在主从操作下进行精细操作。
参考文献
M. Feng, Z. Ni, Y. Fu, X. Jin, W. Liu and X. Lu, “Kinematic analysis of a flexible surgical instrument for robot-assisted minimally invasive surgery,” 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021, pp. 12229-12235, doi:10.1109/ICRA48506.2021.9561634.
国内手术机器人研发前沿成果-机器人辅助微创手术柔性手术器械运动学分析
光学动作捕捉技术以其测量精度高、实时性强、场景应用灵活等优势,为精确跟踪软体机器人空间定位、评估其实时运动状态,以及在不同环境下的研究和测试提供便利,助力软体机器人领域的发展和创新,在更多实际应用场景中做出贡献。



















