import cv2
import json
import numpy as np
from pathlib import Path
import matplotlib.pyplot as plt
from metavision_core.event_io import EventsIterator
def visualization_event_streams(p_list, t_list, x_list, y_list, save_path=None):
# 事件流的3D表示
fig = plt.figure(figsize=(12, 10))
ax = fig.add_subplot(111, projection='3d')
ax.xaxis.set_pane_color((1.0, 1.0, 1.0)) # X轴背景颜色为透明
ax.yaxis.set_pane_color((1.0, 1.0, 1.0)) # Y轴背景颜色为透明
ax.zaxis.set_pane_color((1.0, 1.0, 1.0)) # Z轴背景颜色为透明
ax.grid(False)
new_t1 = [(t-17061000)/100000 for t in t_list] # 调整时间戳
p1 = np.array(p_list)
x1 = np.array(x_list)
y1 = np.array(y_list)
t1 = np.array(new_t1)
colors = np.where(p1 == 1, 'red', 'blue')
ax.scatter(x1, y1, t1, c=colors, marker='o',s=0.5)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('t(s)')
ax.set_xlim(0, 1280)
ax.set_ylim(0, 720)
# print(t1)
if save_path is not None:
plt.savefig(str(save_path), bbox_inches='tight')
plt.close()
# 将点生成2Dmap, TARGET_SHAPE = (346, 260),(720, 1280, 3)
def generate_2D_map(height, width, dict_file, save_map_path, save_stream_path):
map = np.ones((height, width, 3))
map = map * 255
p_list = dict_file['p']
t_list = dict_file['t']
x_list = dict_file['x']
y_list = dict_file['y']
# 生成斜45度事件流图
visualization_event_streams(p_list, t_list, x_list, y_list, save_stream_path)
# 生成2dmap
for polarity, xx, yy in zip(p_list, x_list, y_list):
yy, xx = int(yy), int(xx)
# 正事件为红色,负事件为蓝色,numpy:BGR
if polarity == 1:
map[yy][xx][0] = 0
map[yy][xx][1] = 0
map[yy][xx][2] = 255
elif polarity == 0:
map[yy][xx][0] = 255
map[yy][xx][1] = 0
map[yy][xx][2] = 0
else:
raise BaseException(f"极性错误!({xx},{yy}) {polarity} {save_map_path}")
cv2.imwrite(str(save_map_path), map)
if __name__ == "__main__":
""" Main """
event_file_path = 'UAVforPPT.raw' # 输入的 .raw 文件路径
save_json_dir = Path("UAVforPPT/json")
save_json_dir.mkdir(exist_ok=True, parents=True)
save_event_frame = Path("UAVforPPT/event_frame")
save_event_frame.mkdir(exist_ok=True, parents=True)
save_event_stream = Path("UAVforPPT/event_stream")
save_event_stream.mkdir(exist_ok=True, parents=True)
# Events iterator on Camera or event file
duration_time_us = 3000 # us
mv_iterator = EventsIterator(input_path=event_file_path, delta_t=duration_time_us)
height, width = mv_iterator.get_size() # Camera Geometry
idx = 0
global_counter = 0 # This will track how many events we processed
global_max_t = 0 # This will track the highest timestamp we processed
dict_file = dict(p=[], t=[], x=[], y=[])
# Process events
for evs in mv_iterator:
print("----- New event buffer! -----")
if evs.size == 0:
print("The current event buffer is empty.\n")
else:
min_t = evs['t'][0] # Get the timestamp of the first event of this callback
max_t = evs['t'][-1] # Get the timestamp of the last event of this callback
global_max_t = max_t # Events are ordered by timestamp, so the current last event has the highest timestamp
counter = evs.size # Local counter
global_counter += counter # Increase global counter
print(f"There were {counter} events in this event buffer.")
print(f"There were {global_counter} total events up to now.")
print(f"The current event buffer included events from {min_t} to {max_t} microseconds.")
print("----- End of the event buffer! -----\n")
if min_t < 17061000:
continue
if max_t > 17363997:
break
dict_file['t'] = [int(i) for i in evs['t']]
dict_file['p'] = [int(i) for i in evs['p']]
dict_file['x'] = [int(i) for i in evs['x']]
dict_file['y'] = [int(i) for i in evs['y']]
# 保存json文件
file_name = f"{idx}_{min_t}-{max_t}_{duration_time_us}us"
save_json = save_json_dir / f'{file_name}.json'
# if save_json.exists(): continue
with open(save_json, 'w') as handle:
json.dump(dict_file, handle)
# 生成可视化图
generate_2D_map(height, width, dict_file, save_event_frame / f'{file_name}.png', save_event_stream / f'{file_name}.png')
dict_file['p'].clear()
dict_file['t'].clear()
dict_file['x'].clear()
dict_file['y'].clear()
idx += 1
# break
# Print the global statistics
duration_seconds = global_max_t / 1.0e6
print(f"There were {global_counter} events in total.")
print(f"The total duration was {duration_seconds:.2f} seconds.")
if duration_seconds >= 1: # No need to print this statistics if the total duration was too short
print(f"There were {global_counter / duration_seconds :.2f} events per second on average.")
Python读取prophesee相机输出的raw文件
news2026/2/13 4:49:46
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2240792.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

A3超级计算机虚拟机,为大型语言模型LLM和AIGC提供强大算力支持
热门大语言模型项目地址:www.suanjiayun.com/mirrorDetails?id66ac7d478099315577961758
近几个月来,我们目睹了大型语言模型(LLMs)和生成式人工智能强势闯入我们的视野,显然,这些模型在训练和运行时需要…
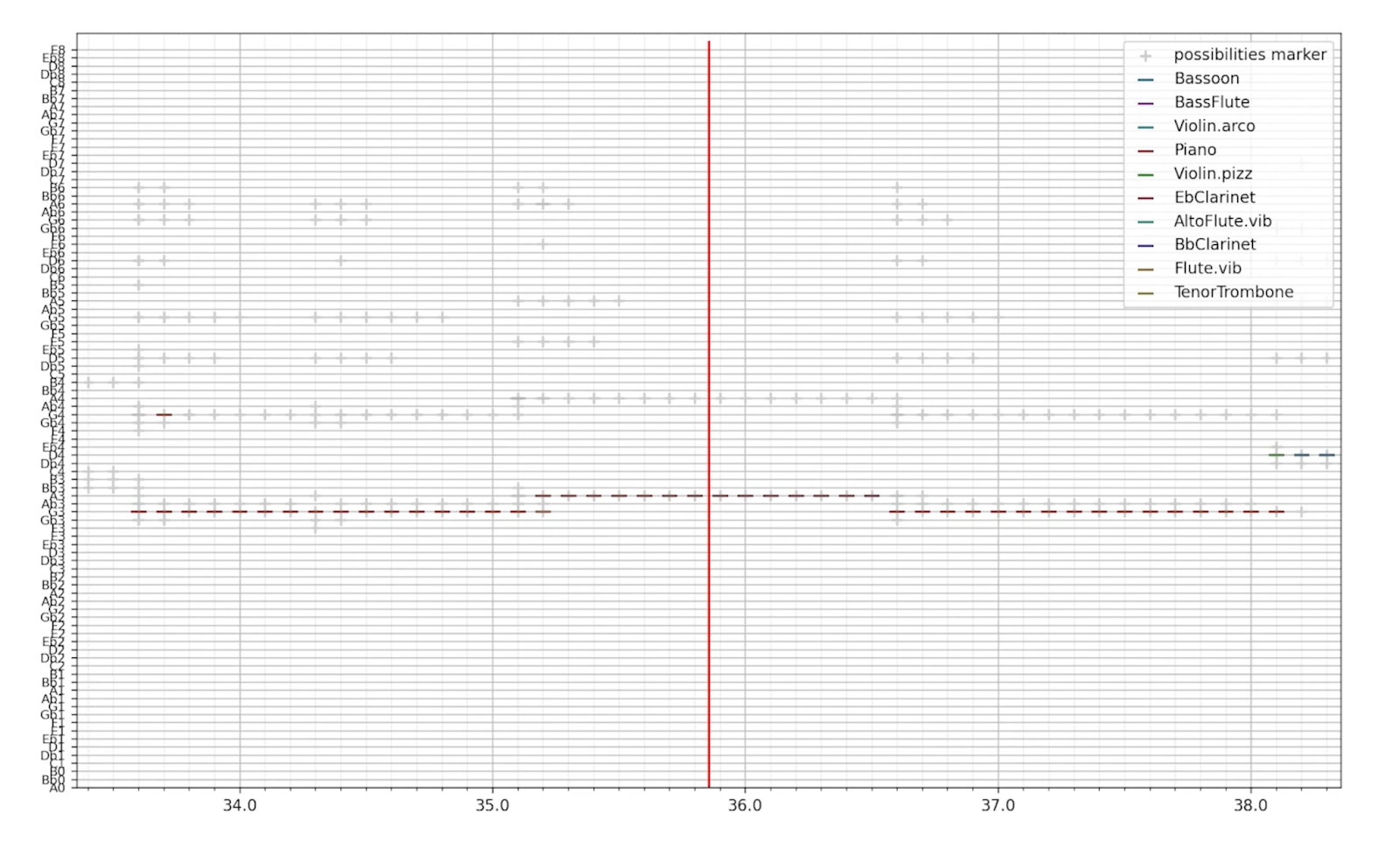
开源音乐分离器Audio Decomposition:可实现盲源音频分离,无需外部乐器分离库,从头开始制作。将音乐转换为五线谱的程序
今天给大家分析一个音频分解器,通过傅里叶变换和信封匹配分离音乐中的各个音符和乐器,实现音乐到乐谱的转换。将音乐开源分离为组成乐器。该方式是盲源分离,从头开始制作,无需外部乐器分离库。
相关链接
代码:https:…
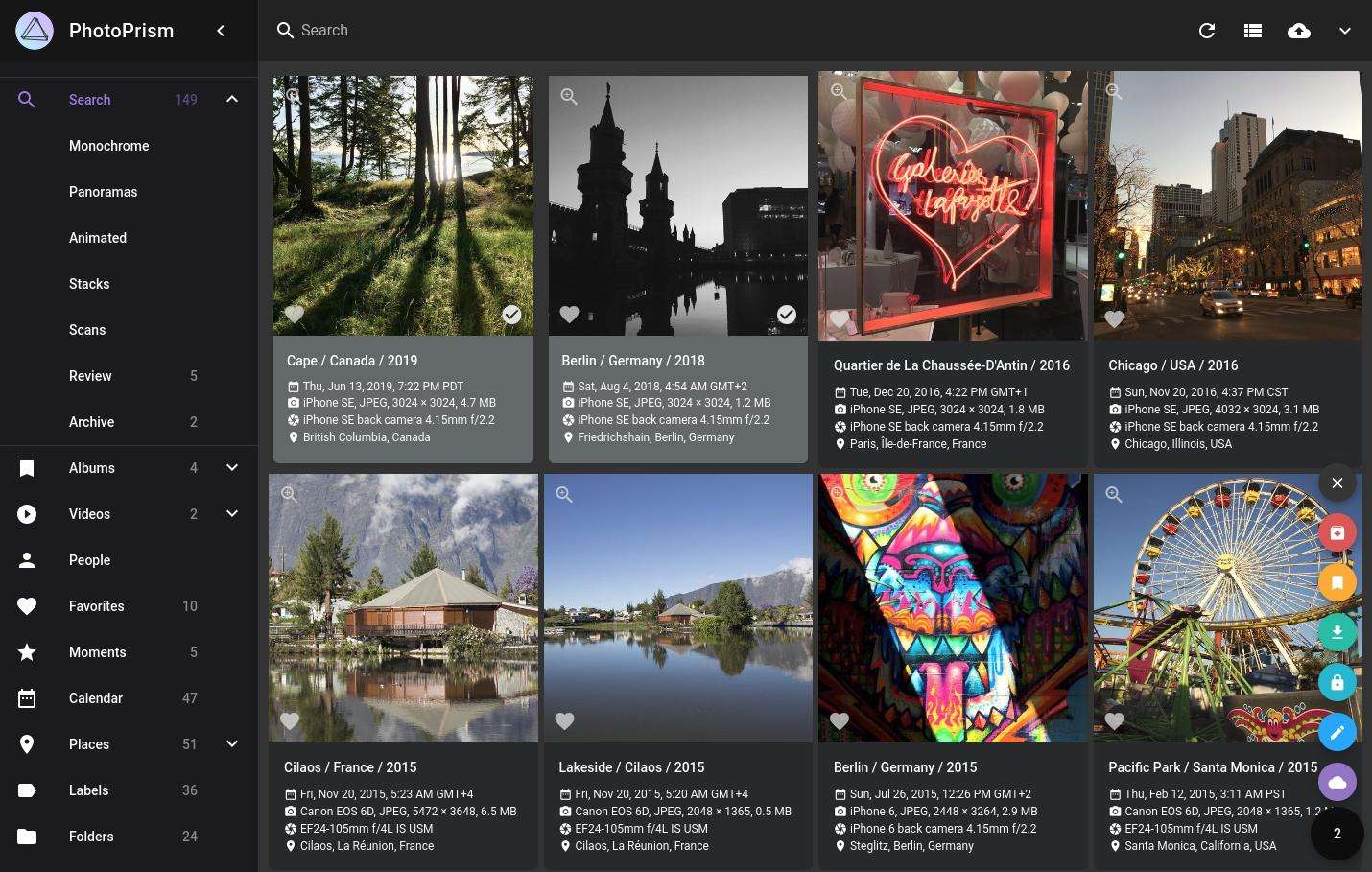
35.3K+ Star!PhotoPrism:一款基于AI的开源照片管理工具
PhotoPrism 简介
PhotoPrism[1] 是一个为去中心化网络设计的AI照片应用,它利用最新技术自动标记和查找图片,实现自动图像分类与本地化部署,你可以在家中、私有服务器或云端运行它。 项目特点
主要特点 浏览所有照片和视频,无需担心RAW转换、重复项或视频格式。 使用强大的…

基于Spider异步爬虫框架+JS动态参数逆向+隧道代理+自定义中间件的猎聘招聘数据爬取
在本篇博客中,我们将介绍如何使用 Scrapy 框架结合 JS 逆向技术、代理服务器和自定义中间件,来爬取猎聘网站的招聘数据。猎聘是一个国内知名的招聘平台,提供了大量的企业招聘信息和职位信息。本项目的目标是抓取指定城市的招聘信息࿰…

计算机网络 (2)计算机网络的类别
计算机网络的类别繁多,根据不同的分类原则,可以得到各种不同类型的计算机网络。 一、按覆盖范围分类 局域网(LAN): 定义:局域网是一种在小区域内使用的,由多台计算机组成的网络。覆盖范围&#…

超好用shell脚本NuShell mac安装
利用管道控制任意系统
Nu 可以在 Linux、macOS 和 Windows 上运行。一次学习,处处可用。
一切皆数据
Nu 管道使用结构化数据,你可以用同样的方式安全地选择,过滤和排序。停止解析字符串,开始解决问题。
强大的插件系统
具备强…

【C#设计模式(9)——组合模式(Component Pattern)】
前言 组合模型是将对象组合成树形结构以表示“整体-部分”的层次结构,使客户终端代码更加简洁和灵活。 代码
//目录抽象类
public abstract class Directory
{protected string _name;public Directory(string name){_name name;}public abstract void Show();
}
…

Ubuntu下Xshell连接腾讯云服务器
1.在腾讯云上买好服务器后,找到控制台,找到自己的服务器重置密码,默认用户名时ubuntu 2.在Xshell连接服务器 然后出现一个秘钥接受,直接接受就好了,然后就出现下面 然后就可以了 查看当前登录的用户 whoami 查看当前服…

初识算法 · 位运算(3)
目录
前言:
两整数之和
题目解析
算法原理
算法编写
只出现一次的数字II
题目解析
算法原理
算法编写 前言:
本文的主题是位运算,通过两道题目讲解,一道是只出现一次的数字II,一道是两整数之和。 链接分别…

微信小程序——01开发前的准备和开发工具
文章目录 一、开发前的准备1注册小程序账号2安装开发者工具 二、开发者工具的使用1创建项目2 工具的使用3目录结构4各个页面之间的关系5 权限管理6提交审核和发布 一、开发前的准备 开发前需要进行以下准备:
1 注册小程序账号2激活邮箱3 信息登记4 登录小程序管理后…

使用热冻结数据层生命周期优化在 Elastic Cloud 中存储日志的成本
作者:来自 Elastic Jonathan Simon 收集数据对于可观察性和安全性至关重要,而确保数据能够快速搜索且获得低延迟结果对于有效管理和保护应用程序和基础设施至关重要。但是,存储所有这些数据会产生持续的存储成本,这为节省成本创造…

记录配置ubuntu18.04下运行ORBSLAM3的ros接口的过程及执行单目imu模式遇到的问题(详细说明防止忘记)
今天的工作需要自己录制的数据集来验证昨天的标定结果
用ORBSLAM3单目imu模式运行,mentor给的是一个rosbag格式的数据包,配置过程出了几个问题记录一下,沿配置流程写。
一.orbslam3编译安装
1.首先是安装各种依赖
这里不再赘述࿰…
vue2项目启用tailwindcss - 开启class=“w-[190px] mr-[20px]“ - 修复tailwindcss无效的问题
效果图 步骤
停止编译"npm run dev"安装依赖 npm install -D tailwindcssnpm:tailwindcss/postcss7-compat postcss^7 autoprefixer^9 创建文件/src/assets/tailwindcss.css,写入内容: tailwind base;
tailwind components;
tailwind utiliti…
实施工程师简历「精选篇」
【#实施工程师简历#】一份出色的实施工程师简历,是获得优质工作机会的重要跳板。那么,如何打造一份令人眼前一亮的实施工程师简历呢?以下是幻主简历网整理的实施工程师简历「精选篇」,欢迎大家阅读收藏! 实施工程师简历…

Linux篇(权限管理命令)
目录 一、权限概述
1. 什么是权限
2. 为什么要设置权限
3. Linux中的权限类别
4. Linux中文件所有者
4.1. 所有者分类
4.2. 所有者的表示方法
属主权限
属组权限
其他权限
root用户(超级管理员)
二、普通权限管理
1. ls查看文件权限
2. 文件…

惊爆!72.1K star 的 Netdata:实时监控与可视化的超炫神器!
在当今复杂的 IT 环境中,实时监控与可视化对于保障系统的稳定运行和性能优化至关重要。 无论是服务器、应用程序,还是网络设备,及时获取性能数据能够帮助我们快速定位问题、优化资源配置。
Netdata,作为一个开源的实时监控工具&a…

姓名改成商标名称,李子柒已成身份证名字!
近日李子柒紫气东来,以中国非物质文化遗产“漆器”生动地展现了中国漆器的独特美学和工艺之美,这条视频在微博已超过1.3亿观看,在国外视频平台订阅超二千万粉丝成海外中文创作第一人。
李子柒原名李佳佳,在网上看到她已经正式将身…

论云游戏的性能与性价比,ToDesk、青椒云、顺网云游戏等具体实操看这篇就够了
文章目录 一、前言二、云电脑产品基础介绍2.1 ToDesk云电脑2.1.1 ToDesk云电脑硬件参数2.1.2 ToDesk云电脑鲁大师跑分2.1.3 ToDesk云电脑收费方式2.1.4 ToDesk云电脑特色功能 2.2 青椒云2.2.1 青椒云游戏娱乐硬件配置2.2.2 青椒云云电脑鲁大师跑分2.2.3 青椒云收费方式2.2.4 青…

服务器数据恢复——Ext4文件系统使用fsck后mount不上的数据恢复案例
关于Ext4文件系统的几个概念: 块组:Ext4文件系统的全部空间被划分为若干个块组,每个块组结构基本上相同。 块组描述符表:每个块组都对应一个块组描述符,这些块组描述符统一放在文件系统的前部,称为块组描述…

ubuntu 下mosquitto TLS配置
1、/etc/mosquitto/mosquitto.conf文件配置 persistence true persistence_location /var/lib/mosquitto/ log_dest file /var/log/mosquitto/mosquitto.log include_dir /etc/mosquitto/conf.d listener 1883 listener 8883 0.0.0.0 password_file /etc/mosquitto/pwfile cert…