文章来源|豆包大模型团队
强化学习(RL)对大模型复杂推理能力提升有关键作用,然而,RL 复杂的计算流程以及现有系统局限性,也给训练和部署带来了挑战。传统的 RL/RLHF 系统在灵活性和效率方面存在不足,难以适应不断涌现的新算法需求,无法充分发挥大模型潜力。
近日,字节跳动豆包大模型团队与香港大学联合提出 HybridFlow(开源项目名:veRL),一个灵活且高效的 RL/RLHF 框架。该框架采用混合编程模型,融合单控制器(Single-Controller)的灵活性和多控制器(Multi-Controller)的高效性,可更好实现和执行多种RL算法,显著提升训练吞吐量,降低开发和维护复杂度。实验结果表明,HybridFlow 在运行各种 RL(HF) 算法时,吞吐量相较 SOTA 基线提升了 1.5-20 倍。
从 ChatGPT [1] 到 o1 等各种大语言模型,强化学习(RL)算法在提升模型性能和适应性方面起着至关重要的作用。在大模型后训练(Post-Training)阶段引入 RL 方法,已成为提升模型质量和对齐人类偏好[2, 3]的重要手段。
然而,随着模型规模的不断扩大,RL 算法在大模型训练中面临着灵活性和性能的双重挑战。
因此,开发一个高效且灵活的大模型 RL 训练框架显得尤为重要。这不仅需要高效地执行复杂的分布式计算流程,还要具备适应不同 RL 算法的灵活性,以满足不断发展的研究需求。
字节跳动豆包大模型团队与香港大学近期公开联合研究成果—— HybridFlow,一个灵活且高效的大模型 RL 训练框架,兼容多种训练和推理框架,支持灵活的模型部署和多种 RL 算法实现。
HybridFlow 采用混合编程模型,将单控制器的灵活性与多控制器的高效性相结合,解耦了控制流和计算流。基于 Ray 的分布式编程,动态计算图,异构调度能力,通过封装单模型的分布式计算、统一模型间的数据切分,以及支持异步 RL 控制流,HybridFlow 能够高效地实现和执行各种 RL 算法,复用计算模块和支持不同的模型部署方式,大大提升了系统的灵活性和开发效率。
实验结果表明,HybridFlow 在各种模型规模和 RL 算法下,训练吞吐量相比其他框架提升了 1.5 倍至 20 倍。
目前,该论文已被 EuroSys 2025 接收,代码仓库也对外公开。
HybridFlow: A Flexible and Efficient RLHF Framework
论文链接:https://team.doubao.com/zh/publication/hybridflow-a-flexible-and-efficient-rlhf-framework?view_from=research
代码链接:https://github.com/volcengine/veRL
1 RL(Post-Training)复杂计算流程给 LLM 训练带来全新的挑战
在深度学习中,数据流(DataFlow)是一种重要的计算模式抽象,用于表示数据经过一系列复杂计算后实现特定功能。神经网络的计算就是典型的 DataFlow ,可以用计算图(Computational Graph)来描述,其中节点代表计算操作,边表示数据依赖。
大模型 RL 的计算流程比传统神经网络更为复杂。在 RLHF 中,需要同时训练多个模型,如 Actor、Critic、参考策略(Reference Policy)和奖励模型(Reward Model),并在它们之间传递大量数据。这些模型涉及不同的计算类型(前向反向传播、优化器更新、自回归生成等),可能采用不同的并行策略。
传统的分布式 RL 通常假设模型可在单个 GPU 上训练,或使用数据并行方式 [4,5],将控制流和计算流合并在同一进程中。这在处理小规模模型时效果良好,但面对大模型,训练需要复杂的多维并行,涉及大量分布式计算,传统方法难以应对。
2 HybridFlow 解耦控制流和计算流,兼顾灵活高效
大模型 RL 本质上是一个二维的 DataFlow 问题:high-level 的控制流(描述 RL 算法的流程)+ low-level 的计算流(描述分布式神经网络计算)。
近期开源的 RLHF 框架,如 DeepSpeed-Chat [6]、OpenRLHF [7] 和 NeMo-Aligner [8],采用了统一的多控制器(Multi-Controller)架构。各计算节点独立管理计算和通信,降低了控制调度的开销。然而,控制流和计算流高度耦合,当设计新的 RL 算法,组合相同的计算流和不同的控制流时,需要重写计算流代码,修改所有相关模型,增加了开发难度。
与此前框架不同,HybridFlow 采用了混合编程模型,控制流由单控制器(Single-Controller)管理,具有全局视图,实现新的控制流简单快捷,计算流由多控制器(Multi-Controller)负责,保证了计算的高效执行,并且可以在不同的控制流中复用。
尽管相比纯粹的多控制器架构,这可能带来一定的控制调度开销,但 HybridFlow 通过优化数据传输,降低了控制流与计算流之间的传输量,兼顾了灵活性和高效性。
3 系统设计之一:Hybrid Programming Model (编程模型创新)
封装单模型分布式计算
在 HybridFlow 中,每个模型(如 Actor、Critic、参考策略、奖励模型等)的分布式计算被封装为独立的模块,称为模型类。
这些模型类继承于基础的并行 Worker 类(如 3DParallelWorker 、FSDPWorker 等),通过抽象的 API 接口,封装了模型的前向、反向计算、优化器更新和自回归生成等操作。该封装方式提高了代码的复用性,便于模型的维护和扩展。
对于不同的 RL 控制流,用户可以直接复用封装好的模型类,同时自定义部分算法所需的数值计算,实现不同算法。当前 HybridFlow 可使用 Megatron-LM [13] 和 PyTorch FSDP [14] 作为训练后端,同时使用 vLLM [15] 作为自回归生成后端,支持用户使用其他框架的训练和推理脚本进行自定义扩展。
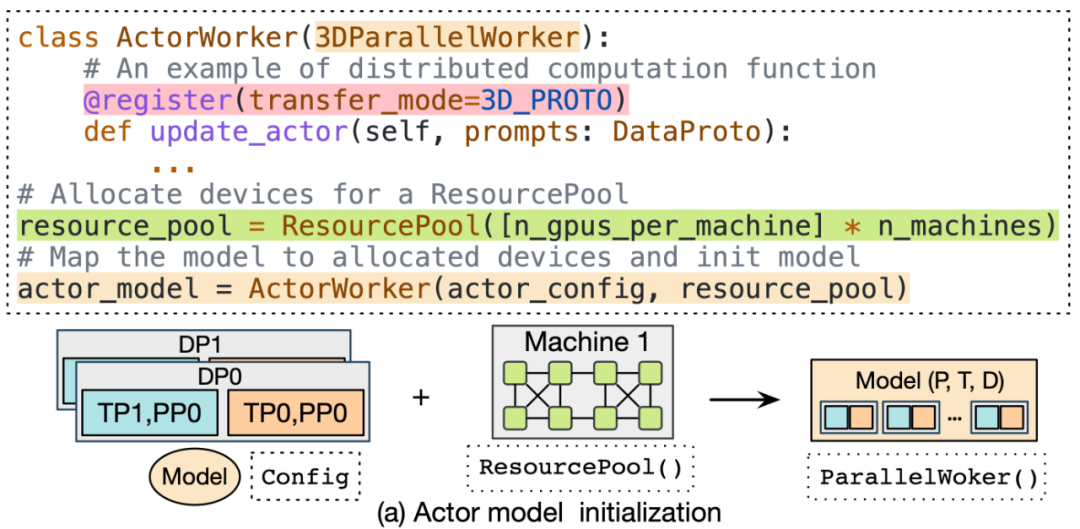
灵活的模型部署
HybridFlow 提供了资源池(ResourcePool)概念,可以将一组 GPU 资源虚拟化,并为每个模型分配计算资源。不同的资源池实例可以对应不同设备集合,支持不同模型在同一组或不同组 GPU 上部署。这种灵活的模型部署方式,满足了不同算法、模型和硬件环境下的资源和性能需求。
统一模型间的数据切分
在大模型 RL 计算流程中,不同模型之间的数据传输涉及复杂的多对多广播和数据重分片。
为解决该问题,HybridFlow 设计了一套通用数据传输协议(Transfer Protocol),包括收集(collect)和分发(distribute)两个部分。
通过在模型类的操作上注册相应的传输协议,比如:@register(transfer_mode=3D_PROTO),HybridFlow 可以在控制器层(Single-Controller)统一管理数据的收集和分发,实现模型间数据的自动重分片,支持不同并行度下的模型通信。
HybridFlow 框架已经支持多种数据传输协议,涵盖大部分数据重切分场景。同时,用户可灵活地自定义收集(collect)和分发(distribute)函数,将其扩展到更复杂的数据传输场景。
支持异步 RL 控制流
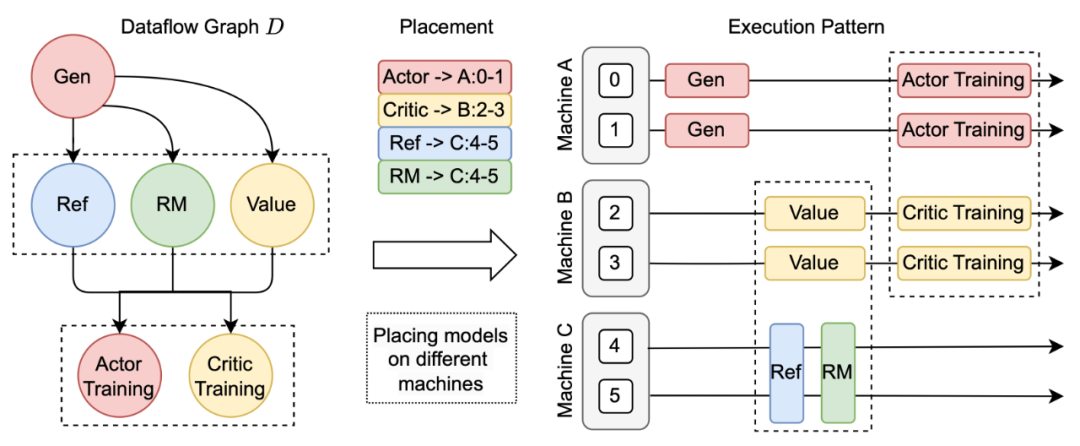
在 HybridFlow 中,控制流部分采用单控制器架构,可灵活实现异步 RL 控制流。
当模型部署在不同设备集合上时,不同模型计算可并行执行,这提高了系统的并行度和效率。对于部署在同一组设备上的模型,HybridFlow 通过调度机制实现了顺序执行,避免资源争夺和冲突。
少量代码灵活实现各种 RL 控制流算法
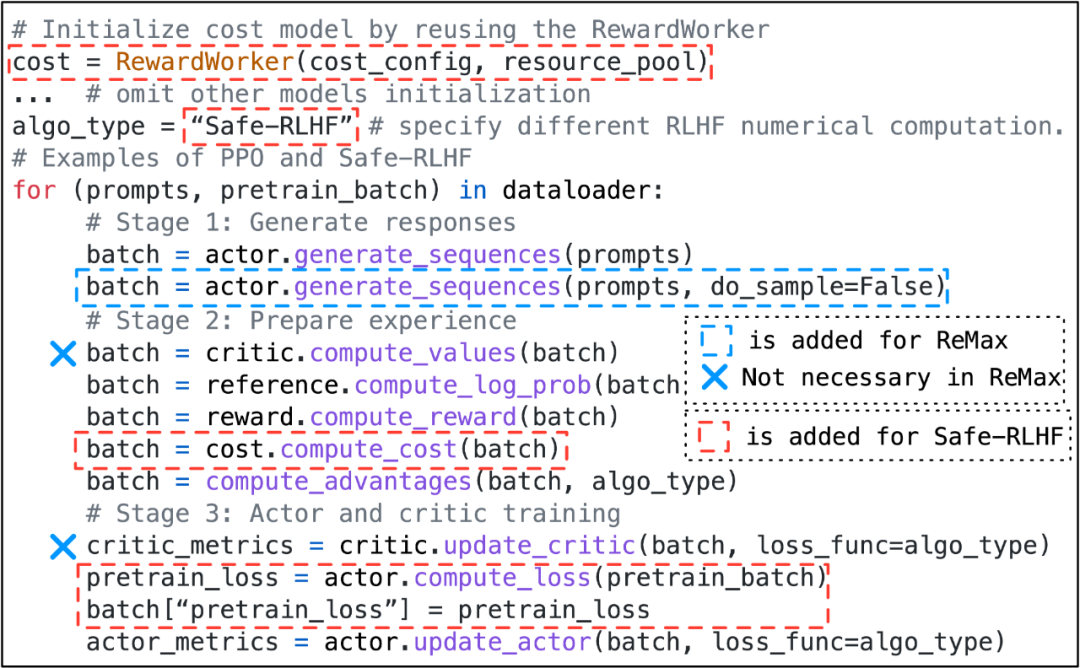
得益于混合编程模型的设计,HybridFlow 可以方便地实现各种 RLHF 算法,如 PPO [9]、ReMax [10]、Safe-RLHF [11]、GRPO [12] 等。用户只需调用模型类的 API 接口,按算法逻辑编写控制流代码,无需关心底层的分布式计算和数据传输细节。
例如,实现 PPO 算法只需少量代码,通过调用 actor.generate_sequences 、critic.compute_values 等函数即可完成。同时,用户只需要修改少量代码即可迁移到 Safe-RLHF、ReMax 以及 GRPO 算法。
4 系统设计之二:3D-HybridEngine (训练推理混合技术)降低通信内存开销
在 Online RL 算法中,Actor 模型需要在训练和生成(Rollout)阶段之间频繁切换,且两个阶段可能采用不同并行策略。
具体而言,训练阶段,需要存储梯度和优化器状态,模型并行度(Model Parallel Size, MP)可能相应增高,而生成阶段,模型无需存储梯度和优化器状态,MP 和数据并行度(Data Parallel Size, DP)可能较小。因此,在两个阶段之间,模型参数需要重新分片和分配,依赖传统通信组构建方法会带来额外通信和内存开销。
此外,为了在新的并行度配置下使用模型参数,通常需要在所有 GPU 之间进行全聚合(All-Gather)操作,带来了巨大的通信开销,增加了过渡时间。
为解决这个问题,HybridFlow 设计了 3D-HybridEngine ,提升了训练和生成过程效率。
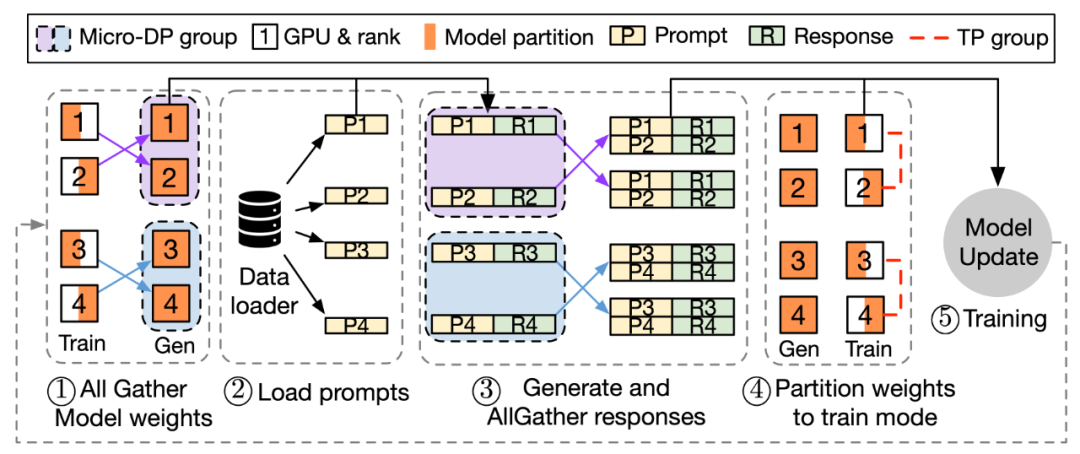
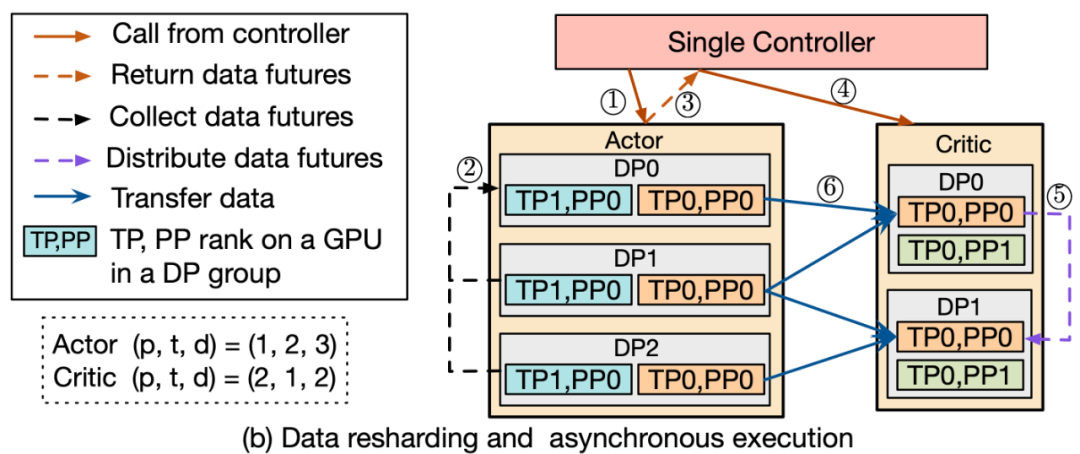
注:3D-HybridEngine 一次迭代的流程
3D-HybridEngine 通过优化并行分组方法,实现了零冗余的模型参数重组,具体包括以下步骤:
定义不同的并行组
在训练和生成阶段,3D-HybridEngine 使用不同的三维并行配置,包括:流水线并行(PP)、张量并行(TP)和数据并行(DP)的大小。训练阶段的并行配置为 𝑝-𝑡-𝑑。在生成阶段,我们新增一个新的微数据并行组(Micro DP Group,𝑑𝑔),用于处理 Actor 模型参数和数据的重组。生成阶段的并行配置为 𝑝𝑔-𝑡𝑔-𝑑𝑔-𝑑。
重组模型参数过程
通过巧妙地重新定义生成阶段的并行分组,可以使每个 GPU 在生成阶段复用训练阶段已有的模型参数分片,避免在 GPU 内存中保存额外的模型参数,消除内存冗余。
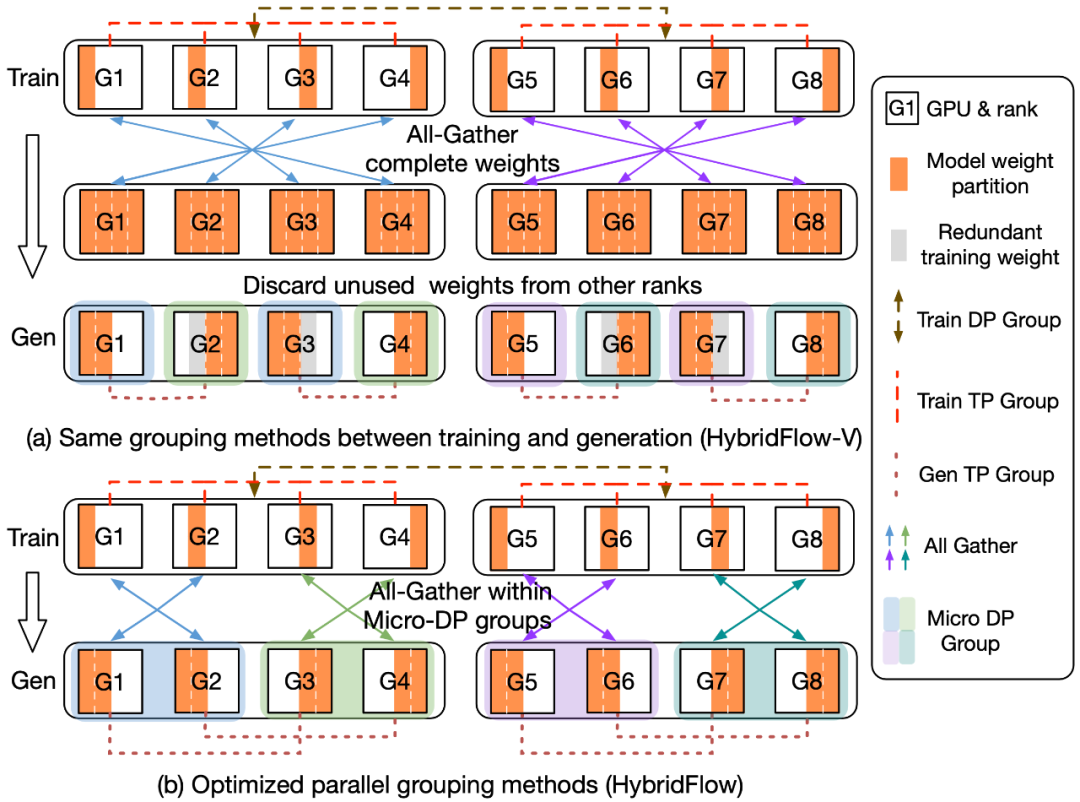
减少通信开销
参数重组过程中,3D-HybridEngine 仅在每个微数据并行组(Micro DP Group)内进行 All-Gather 操作,而非所有 GPU 之间进行。这大大减少了通信量,降低过渡时间,提高了整体的训练效率。
5 实验结果:HybridFlow 提供灵活性的同时,加速了训练
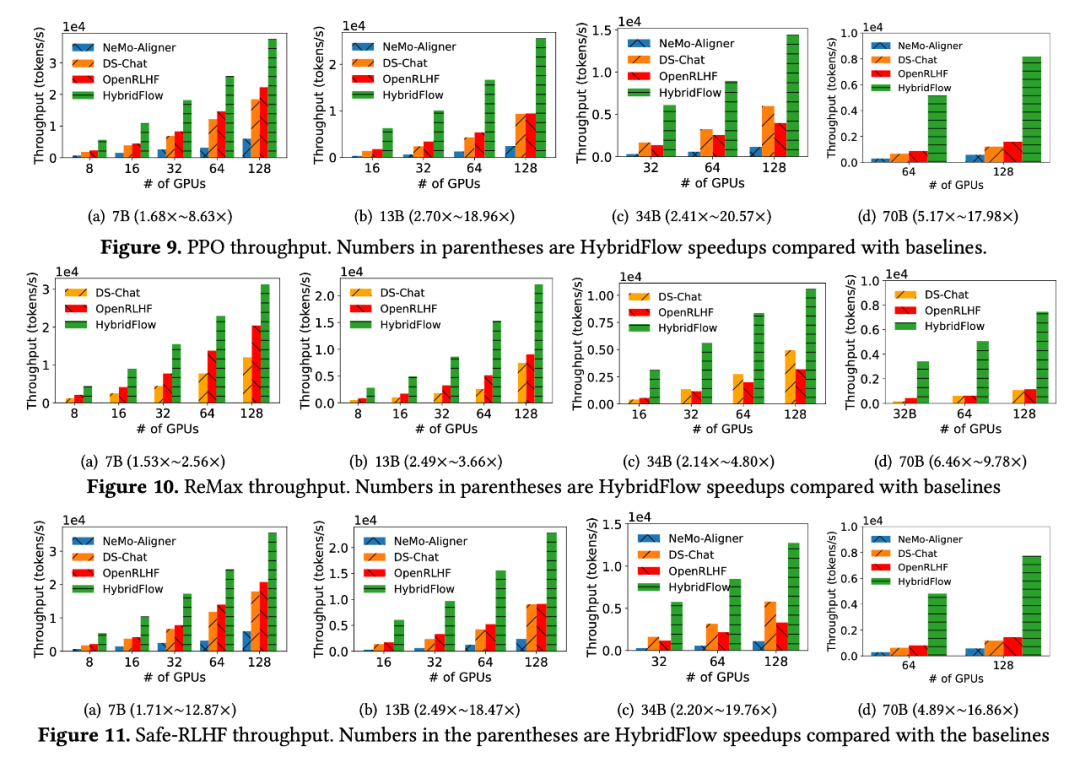
团队在 16 台 A100 GPU 集群上,对 HybridFlow 和主流 RLHF 框架(DeepSpeed-Chat [6] v0.14.0、OpenRLHF [7] v0.2.5 和 NeMo-Aligner [8] v0.2.0)进行对比实验。实验涵盖了不同模型规模(7B、13B、34B、70B)的 LLM,以及不同 RLHF 算法(PPO [9]、ReMax [10]、Safe-RLHF [11])。
所有实验中,Actor、Critic、参考策略 Reference Policy 和奖励模型 Reward Model 均采用相同规模模型。更多实验配置和测试细节请移步完整论文。
更高的端到端训练吞吐量
结果显示,HybridFlow 在各种模型规模和 RLHF 算法下,都显著优于其他框架,实现了更高训练吞吐量。
无论 PPO、ReMax 还是 Safe-RLHF 算法,HybridFlow 在所有模型规模下平均训练吞吐量均大幅领先于其他框架,提升幅度在 1.5 倍至 20 倍之间。
随 GPU 集群规模扩大,HybridFlow 吞吐量也获得良好扩展。这得益于其灵活的模型部署,充分利用硬件资源,实现高效并行计算。同时,HybridFlow 能够支持多种分布式并行框架(Megatron-LM [13]、FSDP [14]、vLLM [15]),满足不同模型规模的计算需求。
HybridEngine 有效减少开销
分析 Actor 模型在训练和生成阶段的过渡时间,团队发现,HybridFlow 的 3D-HybridEngine 的零冗余模型参数重组技术,有效减少了模型参数在两个阶段之间的重分片和通信开销。
相比其他框架,过渡时间减少了 55.2% ,在 70B 模型上过渡时间降低了 89.1%。

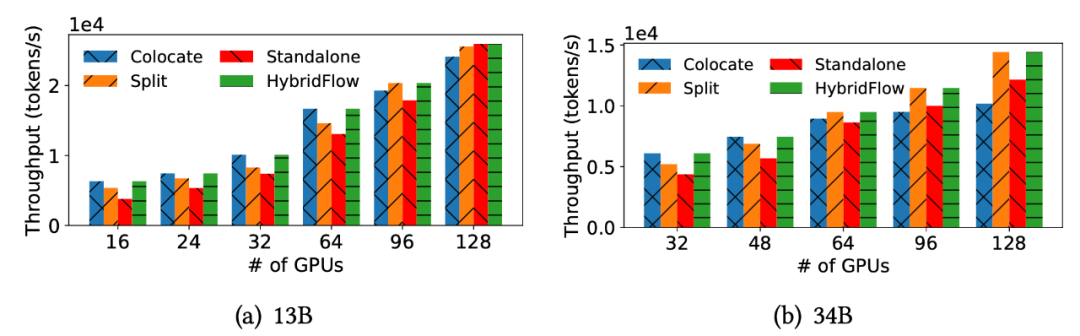
不同模型部署方式对比下的三个洞察
团队对比了不同的模型部署策略,总结了模型部署和 GPU 分配的三大关键洞察:
-
为 Actor 模型分配更多的 GPU ,可以缩短 critical path ;
-
Colocate 模式在相对小规模集群中能够最大化 GPU 利用率;
-
在大规模集群中将 Actor 和 Critic 模型部署在不同的设备能够提升扩展率。
值得一提的是,HybridFlow 同样适用于更广泛的 RL 训练场景,随着 o1 模型诞生,业内对 Reasoning 能力、RL 关注度也在提升,团队后续将围绕相关场景进行探索和实验。
6 写在最后
该成果来自豆包大模型 Foundation 团队,论文一作是团队的实习生明同学,目前就读于香港大学。
“刚加入公司没多久,就把这么重要的系统给我做,机会十分难得。” 他分享道。
明同学进一步补充:“团队里大牛很多,无论什么问题,肯定能找到人聊。这段经历不仅让我学习到非常多新技术,还完整经历一个工业级开源项目从立项到发布的全周期。大家都愿意提供帮助,每个人都是我的 Mentor 。”
目前,豆包大模型 Foundation 团队正持续吸引优秀人才加入,硬核、开放、充满创新精神是团队氛围的关键词。团队希望与具备创新精神、责任心的技术人才一起,推进大模型训练提效工作取得更多进展和成果。
参考文献
[1] Brown, Tom, et al. "Language models are few-shot learners." Advances in neural information processing systems 33 (2020): 1877-1901.
[2] Long Ouyang, et al. 2022. Training language models to follow instructions with human feedback. Advances in Neural Information Processing Systems 35 (2022), 27730–27744.
[3] Yuntao Bai, et al. 2022. Training a helpful and harmless assistant with reinforcement learning from human feedback. arXiv preprint arXiv:2204.05862 (2022).
[4] Eric Liang, et al. 2018. RLlib: Abstractions for distributed reinforcement learning. In International conference on machine learning. PMLR, 3053–3062.
[5] Eric Liang, et al. 2021. RLlib Flow: Distributed Reinforcement Learning is a Dataflow Problem. Advances in Neural Information Processing Systems 34 (2021), 5506–5517.
[6] Zhewei Yao, et al. 2023. DeepSpeed-Chat: Easy, Fast and Affordable RLHF Training of ChatGPT-like Models at All Scales. arXiv preprint arXiv:2308.01320 (2023).
[7] Jian Hu, el al. OpenRLHF: An Easy-to-use, Scalable and High-performance RLHF Framework. arXiv preprint arXiv:2405.11143
[8] NVIDIA Corporation. 2024. NeMo-Aligner: Scalable toolkit for efficient model alignment. https://github.com/NVIDIA/NeMo-Aligner
[9] John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347 (2017).
[10] Ziniu Li, et al. 2023. ReMax: A Simple, Effective, and Efficient Reinforcement Learning Method for Aligning Large Language Models. arXiv preprint arXiv: 2310.10505 (2023).
[11] Josef Dai, et al. 2024. Safe RLHF: Safe Reinforcement Learning from Human Feedback. In The Twelfth International Conference on LearningRepresentations. https://openreview.net/forum?id= TyFrPOKYXw
[12] Zhihong Shao, et al. 2024. Deepseekmath: Pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300 (2024).
[13] Mohammad Shoeybi, et al. 2019. Megatron-lm: Training multi-billion parameter language models using model parallelism. arXiv preprint arXiv:1909.08053 (2019).
[14] Adam Paszke, et al. 2019. Pytorch: An imperative style, high-performance deep learning library. Advances in neural information processing systems 32 (2019).
[15] Woosuk Kwon, et al. 2023. Efficient memory management for large language model serving with pagedattention. In Proceedings of the 29th Symposium on Operating Systems Principles. 611–626.