STM32-FOC(1)STM32 电机控制的软件开发环境
STM32-FOC(2)STM32 导入和创建项目
STM32-FOC(3)STM32 三路互补 PWM 输出
STM32-FOC(4)IHM03 电机控制套件介绍
STM32-FOC(5)基于 IHM03 的无感FOC 控制
STM32-FOC(6)基于 IHM03 的无感方波控制
【动手学电机驱动】STM32-FOC(6)基于 IHM03 的无感方波控制
- 1. 开发环境
- 2. 硬件连接
- 3. 无感方波电机控制
- 3.1 配置电机控制包
- 3.2 图形化配置
- 3.3 代码编辑、编译与调试
- 4. 电机参数设置
P-NUCLEO-IHM03 STM32电机控制套件,为三相、低压和低电流的 BLDC 或 PMSM 电机提供电机控制解决方案。此前我们已经学习了使用 IHM03 电机控制套件开发无感 FOC 电机控制程序的基础操作。
本节从 STM32 电机控制包配置开始,详细介绍使用 IHM03 电机控制套件开发无感方波电机控制程序的方法。
1. 开发环境
- 硬件要求
- Windows PC
- X-NUCLEO-IHM16M1 电机驱动扩展板
- STM32 Nucleo 开发板
- 直流电源,输出电压 12 VDC
- 三相无刷电机
- USB Type-A 或 Type-c 至 Micro-B 连接线缆
- 系统要求:
- Windows 操作系统(Windows 7、Windows 8 和 Windows 10)、Linux 64-bit 或 macOS
- USB Type-A 或 Type-c 至 Micro-B 连接线缆,用于将STM32 Nucleo板连接到 PC
- 开发工具
- STM32 电机控制 SDK:X-CUBE-MCSDK
- STM32 图形化配置工具:STM32CubeMX
- 集成开发环境 IDE,可以选择一下三者之一:
- STM32 集成开发环境(STM32CubeIDE)
- Keil 开发套件(MDK-ARM-STR)
- IAR 嵌入式开发环境(IAR-EWARM)
2. 硬件连接
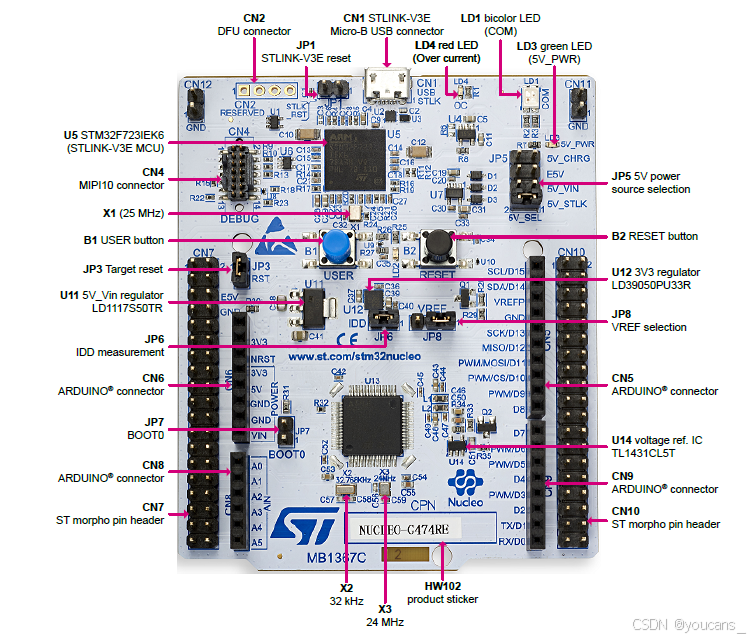
- X-NUCLEO-IHM16M1 电机驱动板必须通过位于两侧的 CN7 和 CN10 连接器插接到 NUCLEO-G431RB 控制板上, 堆叠如下图所示。
NUCLEO-G431RB 板上的两个按钮(蓝色用户按钮B1和黑色重置按钮B2)必须保持未覆盖状态。

-
将三条电机线 U、V、W 连接到 X-NUCLEO-IHM16M1 电机驱动板上的 CN1连接器。
-
配置 NUCLEO-G431RB 控制板上的跳线:
- 从 USB 为 NUCLEO-G431RB 供电时,要将JP5 的 5V-STLK 源设为 [1-2] 位置(跳线安装在 pin1、pin2 针脚);
- JP8 的 VREF 设为 [1-1] 位置(跳线安装在 pin1、pin1 针脚);
- JP6(IDD)设为 ON 状态(安装 2针跳线)。
- 配置控制板和驱动板的跳线,以选择所需的控制算法(如六步方波):
NUCLEO-IHM16M1 电机驱动板的跳线设置:
- J5 设为 ON 状态(安装 2针跳线);
- J6 设为 ON 状态(安装 2针跳线);
NUCLEO-G431RB 控制板的跳线设置: - JP4 和 JP7 设为 OFF 状态(不安装跳线);
- J2 设为 [2-3] 位置(跳线安装在 pin2、pin3 针脚);
- J3 设为 [1-2] 位置(跳线安装在 pin1、pin2 针脚)。
注意:更改控制模式之前,必须关闭电源电压。

- 将 12V/2A 直流电源连接到 NUCLEO-G431RB 控制板上的 CN1 连接端口(mini-USB),或连接到 X-NUCLEO-IHM16M1 电机驱动板上的 J4 连接器(电源插座),并通电(IHM03 套件中标配的云台电机的最大电压为12 VDC)。
3. 无感方波电机控制
3.1 配置电机控制包
- 打开 电机控制软件开发套件(Motor Control WorkBench),创建新项目。
单击"New Project"按钮,弹出"New Project"对话框。
在 “General Info” 菜单中进行设置:- 在 “Project name” 输入项目名称,例如 IHM03_02;
- 在 “Num.Motors” 选择电机数量为 单电机:1 Motor;
- 在 “Driving Algorithm” 选择驱动控制算法为 6步方波:6-Step;
- 在 “Hardware Mode” 选择 Modular 模式。

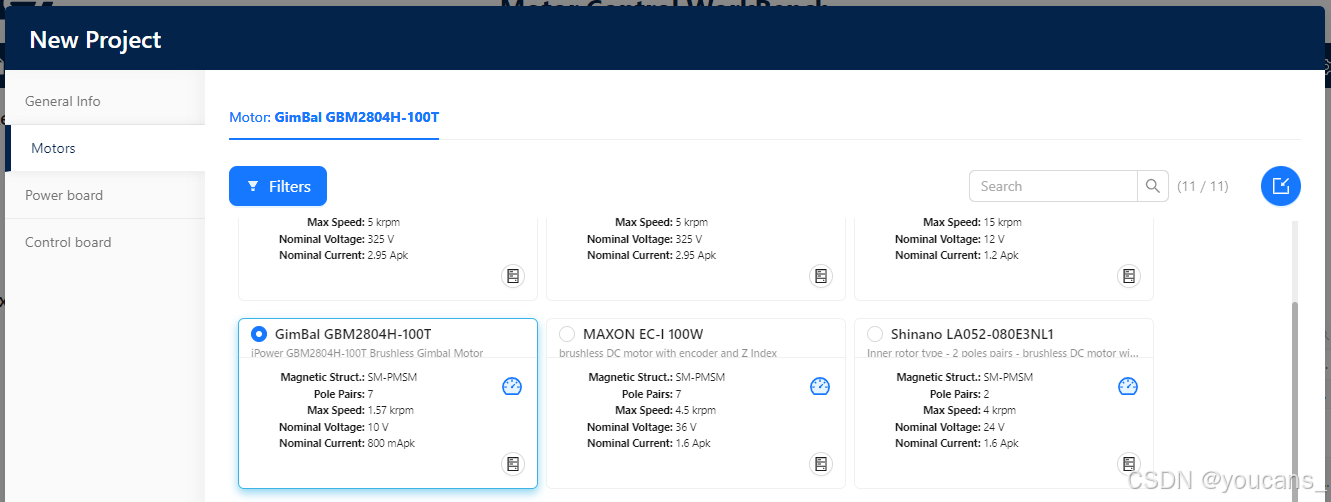
- 进入 “Motors” 菜单,根据 IHM03 电机控制套件的配置,选择电机为 GimBal GBM2804H-100T。
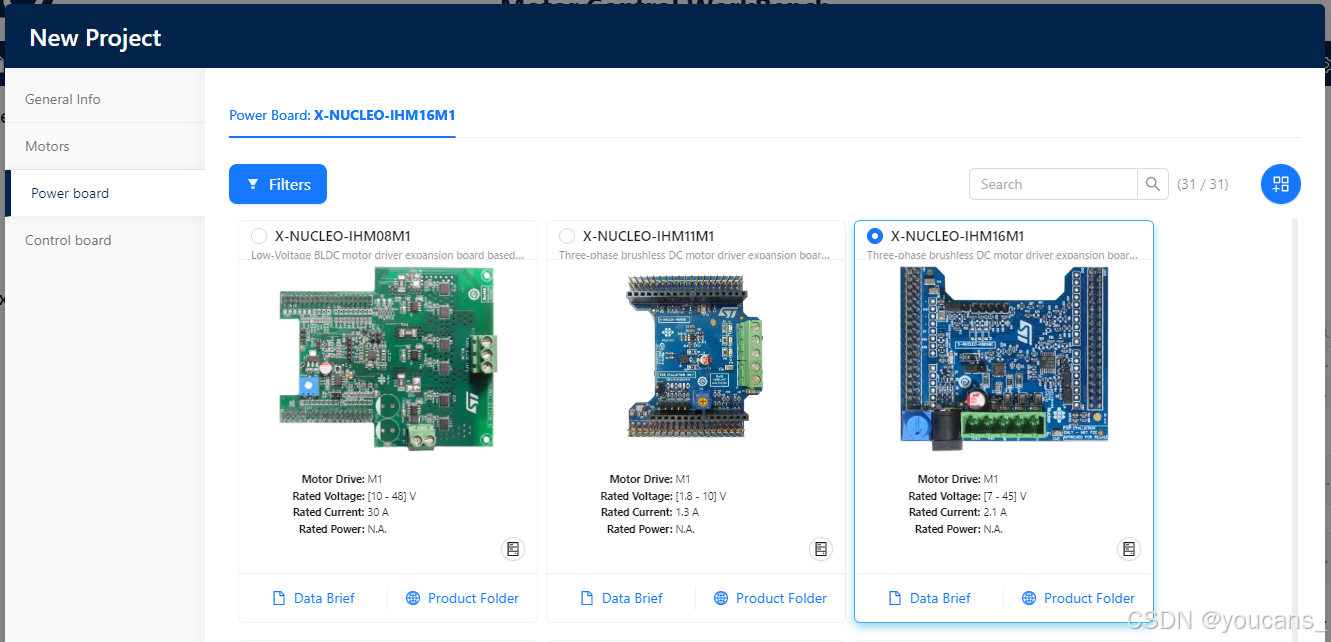
- 进入 “Power board” 菜单,根据 IHM03 电机控制套件的配置,选择驱动板为 X-NUCLEO-IHM16M1 电机驱动板。
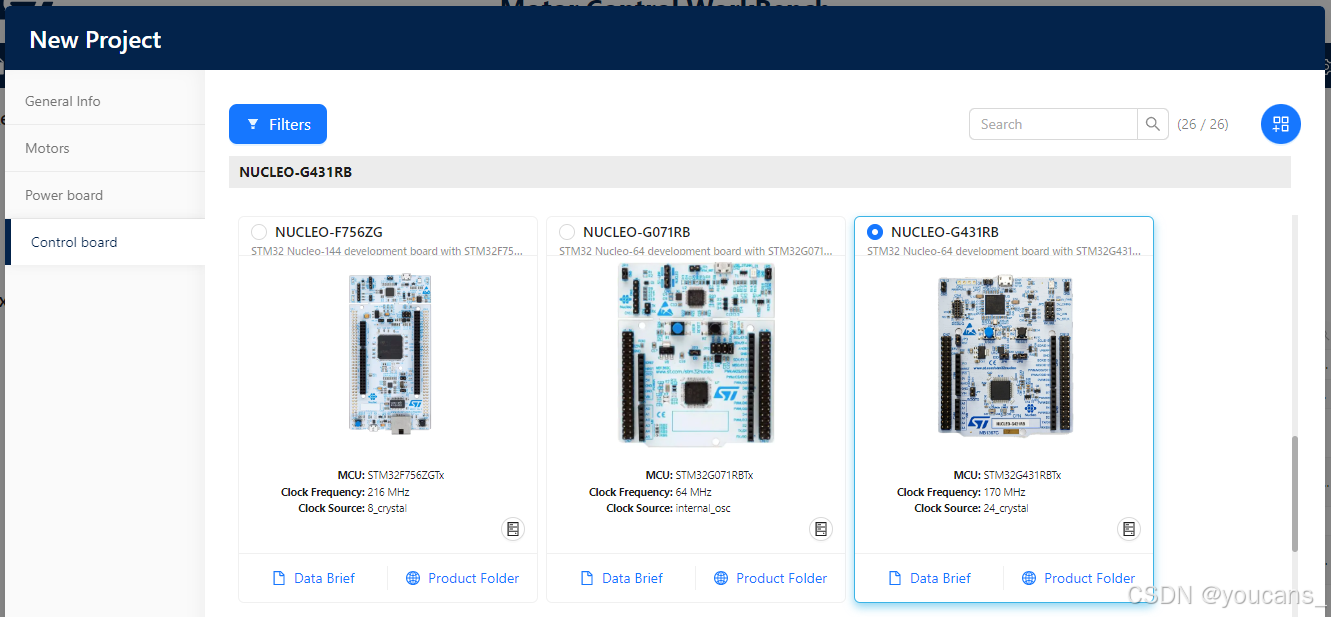
- 进入 “Control board” 菜单,根据 IHM03 电机控制套件的配置,选择控制板为 NUCLEO-G431RB 控制板。
- 完成项目配置后,点击窗口右下方 “>>OK” 按钮,就会自动生成一个电机控制项目,并显示项目视图如下。
视图的内容取决于用户配置的电路板和电机的信息。
如果用户的配置有错误(无效),则会弹出一个对话框,通知用户这些选择不允许创建项目,并要求用户修改配置。

- 修改配置的电路板和电机的信息。
如果配置的电路板或电机的信息与实际使用产品有差异,可以点击相应的模块(蓝色模块),进入该模块的参数配置页面进行修改。
在本例中,电机 GimBal GBM2804H-100T 的默认设置(具体参数与SDK版本有关)为最大电压 10Vdc、最大电流 0.8Apk。这与本套件的配置不一致,因此要点击图中 Motor 蓝色模块,进入电机参数设置页面,将最大电压设为 14.8Vdc、最大电流设为 2.1Apk。

完成电机参数修改后,点击 “>>OK” 确认,返回电机控制项目视图。如下图所示,此时 Motor 蓝色模块中的电机参数已经被修改为 “14.8Vdc/2.1Apk” 。

在这个界面,还可以对电机直接进行控制,具体使用方法将在以后的文章中介绍。
- 配置速度位置控制方案。
点击项目视图中的 “Speed Sensing” 蓝色模块,进入速度位置管理界面。
在 Main Sensor – Sensor Selection 选项中,选择 Sensorless - ADC,即采用无传感器(基于ADC 采样检测过零点)进行控制。
六步方波的驱动方式,就是在同一时刻只有两相绕组通电,一相输入、另一相输出、第三相悬空,以此类推换向 6步,分别是U+V-,U+W-,V+W-,V+U-,W+U-,W+V-。一个周期内每一相的导通时间保持120度的电角度。
当 BLDC 电机转动时,反电势过零点发生在浮空相。通过检测各相各相对地电压,并与直流母线电压对比。当端电压等于直流母线电压一半时,即发生过零事件。在基于ADC的过零点检测方案中,同时测量端电压与直流母线电压并进行对比,获得过零信号。
检测到过零发生并延迟30度,等待转子转过“死点”时进行换向,就能保证电机的持续运行。

- 项目生成。
- 选择菜单 “Generate the project” 按键,根据配置参数生成项目。
- 跳出 “Project generation” 窗口,选择 STM32CubeMX 版本、固件版本(Firmware Package Version),Target Toolchain 为 STM32CubeIDE。
- 默认使用 HAL 驱动。
- 点击 “GENERATE” 按键,生成代码。
注意选择的固件包的版本,如果没有安装相应版本的固件包,则会自动下载。
如下图所示,项目生成完成后,点击 “RUN STM32CubeMX” 按键,打开 STM32CubeMX 进行图形化配置。

3.2 图形化配置
在 Motor Control WorkBench)中生成项目,点击 “RUN STM32CubeMX” 按键,打开 STM32CubeMX,如下图所示。
参考点灯实验程序,可以将PA5 管脚设置为 GPIO_Output——这与电机控制无关,只供参考。

点击 “Project Manager” 菜单按钮,进入工程配置界面。
- 输入项目名称为 “IHM03_02”,选择项目的保存路径。
- 将Toolchain / IDE 设为 STM32CubeIDE(根据用户安装和使用的 IDE 选择,也可以选择 EWARM、MDK-ARM、MakeFile、CMake 等IDE工具)。
- 点击右上角 “GENERATE CODE” 生成代码。

加载完毕后,弹出代码生成提示窗口,如下图所示。点击“ OPEN PROJECT”,进入 STM32CubeIDE。
3.3 代码编辑、编译与调试
-
打开 STM32CubeIDE,导入 IHM03_02 项目。
如果是从 CubeMX 代码生成提示窗口点击“ OPEN PROJECT”,则进入 STM32CubeIDE后自动打开 IHM03_02 项目。 -
在左侧 Project Explorer 中,选择 IHM03_02 – Application – User,打开主程序 main.c ,中断服务程序 tm32g4xx_it.c,stm32g4xx_mc_it.c ,如下图所示。

- 主程序 main.c
/******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************/
- 中断服务程序 tm32g4xx_it.c
/******************************************************************************
* @file stm32g4xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************/
- 中断服务程序 stm32g4xx_mc_it.c,
/******************************************************************************
* @file stm32g4xx_mc_it.c
* @author Motor Control SDK Team, ST Microelectronics
* @brief Main Interrupt Service Routines.
* This file provides exceptions handler and peripherals interrupt
* service routine related to Motor Control for the STM32G4 Family.
******************************************************************************/
如果要加入 LED2 闪烁功能,则要在主程序 main.c 的 while(1) 循环中添加以下程序(这与电机控制无关,只供参考):
/* Infinite loop */
while (1)
{
/* USER CODE BEGIN WHILE */
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5);
/* Insert delay 500 ms */
HAL_Delay(500);
/* USER CODE END WHILE */
}
- 程序编译
- 用 USB连接线,连接 PC 与 NUCLEO-G431RB 开发板。
- 点击工具栏中 “Build Debug” 按键对程序代码进行编译。

- 程序下载烧录到目标板
- 点击工具栏中 “Debug” 按键,将程序下载烧录到目标板 NUCLEO-G431RB 。
程序烧录完成后,显示内容如下。
STMicroelectronics ST-LINK GDB server. Version 7.8.0
Copyright (c) 2024, STMicroelectronics. All rights reserved.
Starting server with the following options:
Persistent Mode : Disabled
Logging Level : 1
Listen Port Number : 61234
Status Refresh Delay : 15s
Verbose Mode : Disabled
SWD Debug : Enabled
InitWhile : Enabled
Waiting for debugger connection...
Debugger connected
Waiting for debugger connection...
Debugger connected
Waiting for debugger connection...
-------------------------------------------------------------------
STM32CubeProgrammer v2.17.0
-------------------------------------------------------------------
Log output file: C:\Users\huang\AppData\Local\Temp\STM32CubeProgrammer_a24036.log
ST-LINK SN : 003E00363432511230343838
ST-LINK FW : V3J15M7
Board : NUCLEO-G431RB
Voltage : 3.28V
SWD freq : 8000 KHz
Connect mode: Under Reset
Reset mode : Hardware reset
Device ID : 0x468
Revision ID : Rev X
Device name : STM32G43x/G44x
Flash size : 128 KBytes
Device type : MCU
Device CPU : Cortex-M4
BL Version : 0xD4
Memory Programming ...
Opening and parsing file: ST-LINK_GDB_server_a24036.srec
File : ST-LINK_GDB_server_a24036.srec
Size : 35.75 KB
Address : 0x08000000
Erasing memory corresponding to segment 0:
Erasing internal memory sectors [0 17]
Download in Progress:
File download complete
Time elapsed during download operation: 00:00:00.944
Verifying ...
Download verified successfully

- 程序的运行与调试
- 对照 2.1 检查 IHM03 套件硬件连接和电源连接。
- 接通 12Vdc电源。
- 点击工具栏中 “Resume” 按键 或 F8 快捷键,运行程序。
- LED2 灯闪烁(如果加入闪灯程序)。
- 按下蓝色按键 B1,电机开始运行。
- 按下黑色按键 B2,电机停止运行。
实验结果如下:

至此,我们就完成了使用 IHM03 电机控制套件开发基本的无感方波电机控制程序。
4. 电机参数设置
我们更换另一种型号的直流电机 KJ230F,该电机的主要参数为:
- 极对数:6
- 电阻:3.4ohm
- 电感:0.54mH

我们首先介绍 如何在程序中设置电机参数。
- 打开中断处理程序 stm32g4xx_mc_it.c,鼠标选中 “parameters_conversion.h” 后按 F3 按键打开;
/* * @file stm32g4xx_mc_it.c */
/* Includes ------------------------------------------------------------------*/
#include "mc_config.h"
#include "mc_type.h"
//cstat -MISRAC2012-Rule-3.1
#include "mc_tasks.h"
//cstat +MISRAC2012-Rule-3.1
#include "parameters_conversion.h"
- 打开包含文件 parameters_conversion.h,鼠标选中 “pmsm_motor_parameters.h” 后按 F3 按键打开;
/* * @file parameters_conversion.h */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef PARAMETERS_CONVERSION_H
#define PARAMETERS_CONVERSION_H
#include "mc_math.h"
#include "parameters_conversion_g4xx.h"
#include "pmsm_motor_parameters.h"
#include "drive_parameters.h"
#include "power_stage_parameters.h"
- 打开电机参数定义文件 pmsm_motor_parameters.h,找到其中的电机电气参数定义部分 “MOTOR ELECTRICAL PARAMETERS”,修改如下:
- 将极对数 POLE_PAIR_NUM 修改为 6;
- 将定子电阻 RS 修改为 3.4 (ohm);
- 将定子电感 LS 修改为 0.00058 (H)。
修改后的程序如下。
* @file pmsm_motor_parameters.h
/* * @file parameters_conversion.h */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef PMSM_MOTOR_PARAMETERS_H
#define PMSM_MOTOR_PARAMETERS_H
/************************
*** Motor Parameters ***
************************/
/***************** MOTOR ELECTRICAL PARAMETERS ******************************/
#define POLE_PAIR_NUM 6 /* Number of motor pole pairs */
#define RS 3.4 /* Stator resistance , ohm*/
#define LS 0.00058 /* Stator inductance, H
For I-PMSM it is equal to Lq */
/* When using Id = 0, NOMINAL_CURRENT is utilized to saturate the output of the
PID for speed regulation (i.e. reference torque).
Transformation of real currents (A) into int16_t format must be done accordingly with
formula:
Phase current (int16_t 0-to-peak) = (Phase current (A 0-to-peak)* 32767 * Rshunt *
*Amplifying network gain)/(MCU supply voltage/2)
*/
#define MOTOR_MAX_SPEED_RPM 1572 /*!< Maximum rated speed */
#define MOTOR_VOLTAGE_CONSTANT 5.0 /*!< Volts RMS ph-ph /kRPM */
#define NOMINAL_CURRENT_A 2.160
- 重新编译程序,将程序下载烧录到目标板 NUCLEO-G431RB 。
- 对照 2.1 检查 IHM03 套件硬件连接和电源连接。
- 驱动板、控制板上电后:
- LED2 灯闪烁(如果加入闪灯程序)。
- 按下蓝色按键 B1,电机开始运行。
- 按下黑色按键 B2,电机停止运行。
至此,我们就完成了对新电机的参数设置。
如果电机运行异常,例如噪音大,卡顿,则需要进一步调节控制环路的 PI 参数,对此将在后文介绍。

参考资料:
P-NUCLEO-IHM03 STM32电机控制套件
UM2505 - STM32G4 Nucleo-64 boards (MB1367), STMicroelectronics/意法半导体, 2021
UM2538 - STM32 motor-control pack using the FOC algorithm for three-phase, low-voltage, and low‑current motor evaluationl, STMicroelectronics/意法半导体, 2023
许少伦等,STM32G4入门与电机控制实战,电子工业出版社,2023
版权声明:
欢迎订阅youcans@qq 原创作品 【动手学电机驱动专栏】
转载必须标注原文链接:(https://blog.csdn.net/youcans/category_12645064.html)
Copyright@youcans 2024
Crated:2024-1