🚀write in front🚀
🔎大家好,我是黄桃罐头,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝💬本系列哔哩哔哩江科大STM32的视频为主以及自己的总结梳理📚
🚀Projeet source code🚀
💾工程代码放在了本人的Gitee仓库:iPickCan (iPickCan) - Gitee.com
引用:
STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
Keil5 MDK版 下载与安装教程(STM32单片机编程软件)_mdk528-CSDN博客
STM32之Keil5 MDK的安装与下载_keil5下载程序到单片机stm32-CSDN博客
0. 江协科技/江科大-STM32入门教程-各章节详细笔记-查阅传送门-STM32标准库开发_江协科技stm32笔记-CSDN博客
【STM32】江科大STM32学习笔记汇总(已完结)_stm32江科大笔记-CSDN博客
江科大STM32学习笔记(上)_stm32博客-CSDN博客
STM32学习笔记一(基于标准库学习)_电平输出推免-CSDN博客
STM32 MCU学习资源-CSDN博客
stm32学习笔记-作者: Vera工程师养成记
stem32江科大自学笔记-CSDN博客
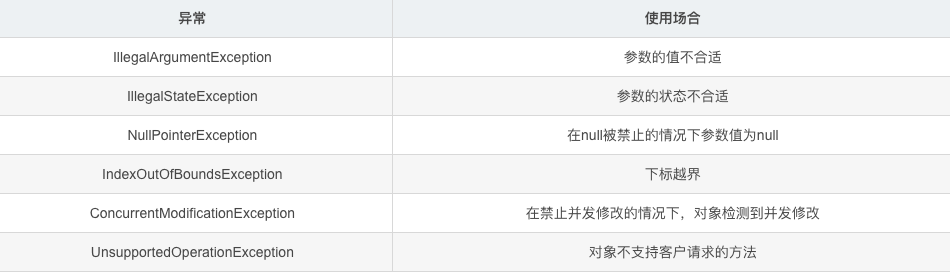
术语:
| 英文缩写 | 描述 |
| GPIO:General Purpose Input Onuput | 通用输入输出 |
| AFIO:Alternate Function Input Output | 复用输入输出 |
| AO:Analog Output | 模拟输出 |
| DO:Digital Output | 数字输出 |
| 内部时钟源 CK_INT:Clock Internal | 内部时钟源 |
| 外部时钟源 ETR:External Trigger | 时钟源 External 触发 |
| 外部时钟源 ETR:External Trigger mode 1 | 外部时钟源 External 触发 时钟模式1 |
| 外部时钟源 ETR:External Trigger mode 2 | 外部时钟源 External 触发 时钟模式2 |
| 外部时钟源 ITRx:Internal Trigger inputs | 外部时钟源,ITRx (Internal trigger inputs)内部触发输入 |
| 外部时钟源 TIx:exTernal Input pin | 外部时钟源 TIx (external input pin)外部输入引脚 |
| CCR:Capture/Comapre Register | 捕获/比较寄存器 |
| OC:Output Compare | 输出比较 |
| IC:Input Capture | 输入捕获 |
| TI1FP1:TI1 Filter Polarity 1 | Extern Input 1 Filter Polarity 1,外部输入1滤波极性1 |
| TI1FP2:TI1 Filter Polarity 2 | Extern Input 1 Filter Polarity 2,外部输入1滤波极性2 |
| DMA:Direct Memory Access | 直接存储器存取 |
正文:
0. 概述
从 2024/06/12 定下计划开始学习下江协科技STM32课程,接下来将会按照哔站上江协科技STM32的教学视频来学习入门STM32 开发,本文是视频教程 P2 STM32简介一讲的笔记。
1.🚚SPI
外设介绍

时钟频率就是SCK波形的频率,一个SCK时钟交换一个bit,所以时钟频率一般体现的是传输速度,单位是Hz或者bit/s。可以看出来,SPI的时钟其实就是由pclk分频得来的,pclk就是外设时钟,APB2的PCLK就是72MHz,APB1的PCLK是36MHz。
注意事项:
- 💎一是这个频率数值并不是任意指定的,它只能是PCLK执行分频后的数值就只有这八个选项。
- 💎二是SPI1和SPI2挂载的总线是不一样的,SPI1挂载在APB2,PCLK是72MHz,SPI1挂载在APB1,PCLK是36MHz,所以同样的配置,SPI1的时钟频率要比SPI2的大一倍。
兼容I2S协议:是一种数字音频信号专用协议、


接下来看一下SPI的框图,我们可以大致把它分成两部分,左上角这一部分就是数据寄存器和移位寄存器打配合的过程。然后剩下右下角这一部分,就是一些控制逻辑寄存器。
移位寄存器,右边的数据低位,一位一位的从MOSI移出去,然后MISO的数据一位一位的移入到左边的数据高位,显然移位寄存器应该是一个右移的状态,所以目前图上表示的是低位先行的配置。
💎对应右下角有一个LSBFIRST的控制位,这一位可以控制是低位先行还是高位先行。
这里LSBFIRST帧格式:给0先发送MSB,MSB就是高位的意思,给1先发送LSB ,LSB 就是低位的意思。那ppt这里目前的状态LSBFIRST的应该是1,低位先行。如果LSBFIRST给0,高位先行的话,这个图还要变动一下,就是移位寄存器变为左移,输出,从左边移出去,输入,从右边移进来,这样才符合逻辑。

然后继续看左边这一块,这里画了个方框,里面把MOSI和MISO做了个交叉,这一块主要是用来进行主从模式引脚变换的。我们这个SPI外设可以做主机,也可以做从机,做主机时这个交叉就不用,MOSI为MO,主机输出,MISO为MI,主机输入,这是主机的情况。
如果我们STM32作为从机的话,MOSI为SI,从机输入,这时他就要走交叉的这一路,输入到移位寄存器,同理MISO为SO,从机输出,这时输出的数据也走交叉的这一路输出到MISO。
接收发送缓冲区

接收发送缓冲区,这两个缓冲区实际上就是数据寄存器DR,下面发送缓冲区就是发送数据寄存器TDR,上面接收缓冲区就是接收数据寄存器RDR,TDR和RDR占用同一个地址,统一叫做DR。
💎写入DR时,数据写入到TDR,读取DR时,数据从RDR读出,数据寄存器和移位寄存器打配合,可以实现连续的数据流。
具体流程:比如我们需要连续发送一批数据,第一个数据写入到TDR,当移位寄存器没有数据移位时,TDR的数据会立刻转入移位寄存器,开始移位,这个转入时刻,会置状态寄存器的TXE为1,表示发送寄存器空,当我们检查TXE置1后,紧跟着下一个数据就可以提前写入到TDR里侯着了,一旦上个数据发完,下一个数据就可以立刻跟进,实现不间断的连续传输。然后移位寄存器,这里一旦有数据过来了,它就会自动产生时钟将数据移出去,在移出的过程中,MISO的数据也会移入,一旦数据移出完成,数据移入也完成了,这时移入的数据就会整体的从移位计算器,转入到接收缓冲区RDR,这个时刻会置状态寄存器器的RXNE为1,表示接收计寄存器器非空。当我们检查RXNE置1后,就要尽快把数据从RDR读出来,在下一个数据到来之前,读出RDR就可以实现连续接收。否则如果下一个数据已经收到了,上个数据还没从RDR读出来,那RDR的数据就会被覆盖,就不能实现连续的数据流了。
右下角是一些控制逻辑,首先是波特率发生器,这个主要就是用来产生SCK时钟的,它的内部主要就是一个分频器,输入时钟是PCLK72M或36M,经过分频器之后输出到SCK引脚,当然这里生成的时钟肯定是和移位寄存器同步的,每产生一个周期的时钟移入移出一个bit

然后右边CR1寄存器的三个位BR0、BR1、BR2,用来控制分频系数。手册这里看到BR[2:0] 是波特率控制,这三位写入下面这些值,可以对PCLK时钟执行2~ 256的分频,分频之后就是SCK时钟,所以这一块就对于来之前这里说的时钟频率是fpclk的2~256分频,那这就是波特率发生器的部分。

- LSB FIRST,决定高位先行还是低位先行。
- SPE是SPI使能,就是SPI_Cmd函数配置的位。
- BR配置波特率,就是SCK时钟频率。
- MSTR(Master),配置主从模式,1是主模式,0是从模式,我们一般用主模式
- CPOL和CPHA,用来选择SPI的四种模式。
- SR状态寄存器,TXE发送寄存器空,RXNE接收寄存器非空,这两个比较重要,我们发送接收数据的时候需要关注这两位。
- CR2寄存器,是一些使能位,比如中断使能,DMA使能等。

NSS引脚,SS就是从机选择,低电平有效,所以这里前面加了个n,SS引脚我们直接使用一个GPIO模拟就行,因为SS引脚很简单,就置一个高低电平就行了。而且从机的情况下,ss还会有多个。


移位寄存器,是左移,高位移出去,通过GPIO到MOSI,从MOSI输出,显然这是SPI的主机。
之后引入的数据从MISO进来,通过gpio到移位寄存器的低位,这样循环八次,就能实现主机和从机交换一个字节,然后TDR和RDR的配合,可以实现连续的数据流。
另外TDR数据,整体转入移位寄存器的时刻,置TXE标志位。移位寄存器数据整体转入RDR的时刻,置RXNE标志位。
波特率发生器,产生时钟输出到SCK引脚。
数据控制器,看成是一个管理员,它控制着所有电路的运行。
开关控制就是SPI_Cmd,初始化之后,给个ENABLE,初始化整个外设。
SS从机选择引脚,另外这里并没有画SS从机选择引脚,这个引脚我们还是使用普通的GPIO来模拟即可。在一主多从的模型下,GPIO模拟的SS是最佳选择,这就是SPI的简化的结构。

非连续传输的好处,就是容易封装好理解好用,但是会损失一丢丢性能;连续传输呢传输更快,但是操作起来相对复杂,那我们来分别具体分析一下。
- 💎首先第一行是SCK时钟线,这里CPOLl=1,CPHA=1,示例使用的是SPI模式3,所以SCK默认是高电平,然后在第一个下降沿MOSI和MISO移出数据,之后上升沿引入数据,依次这样来进行。
- 💎第二行是MOSI/MISO输出的波形,跟随SCK时钟变化,数据位依次出现,这里从前到后依次出现的是b0~b7 ,所以这里示例演示的是低位先行的模式,实际SPI高位先行用的多一些。
- 💎第三行是TXE发送寄存器空标志位,波形是这样的,等会儿再分析。
- 💎第四行,是发送缓冲器(写入SPI_DR),实际上就是这里的TDR
- 💎第三五是BSY, busy是由硬件自动设置和清除的。当有数据传输时,busy置1。
那上面这部分演示的就是输出的流程和现象。
然后下面是输入的流程和现象。
MISO/MOSI(输入),之后是RXNE接收数据寄存器非空标志位,最后是接收缓冲器(读出SPI_DR)。
发送的流程

我们来从左到右依次分析,首先SS置低电平,开始时序,在刚开始时TXE为1,表示TDR空,可以写入数据开始传输,然后下面指示的第一步就是软件写入0xF1至SPI_DR,0xF1就是要发送的第一个数据,之后看到写入之后TDR变为0xF1 ,同时TXE变为0,表示TDR已经有数据了,那此时TDR是等候区,移位寄存器才是真正的发送区。
移位寄存器刚开始肯定没有数据,所以在等候区TDR里的F1 ,就会立刻转入移位寄存器开始发送,转入瞬间置TXE标志位为1,表示发送寄存器空,然后移位寄存器有数据了,波形就自动开始生成,
数据转入移位寄存器之后,数据F1的波形就开始产生了,在移位产生F1波形的同时,等候区TDR是空的,为了移位完成时,下一个数据能不间断的跟随,这里我们就要提早把下一个数据写入到TDR里等着了。
所以下面第二步的操作,是写入F1之后,软件等待TXE=1,在这个位置,一旦TDR空了,我们就写入F2至SPI_DR,写入之后可以看到TDR的内容就变成F2了,也就是把下一个数据放到TDR里候着。
之后的发送流程也是同理,最后在这里如果我们只想发送三个数据,F3转入移位寄存器之后,TXE=1,我们就不需要继续写入了,TXE之后一直是1,注意在最后一个TXE=1之后,还需要继续等待一段时间,F3的波形才能完整发送完,等波形全部完整发送之后,busy的标志由硬件清除,这才表示波形发送完成了,那这些就是发送的流程。
接收的流程

接收的流程:SPI是全双工,发送的同时还有接收,所以可以看到在第一个字节发送完成后,第一个字节的接收也完成了,接收到的数据1是A1 ,这时移位寄存器的数据整体转入RDR,RDR随后存储的就是A1 ,转入的同时按RXNE标志位也置1,表示收到数据了。
我们的操作是下面这里写的,软件等待RXNE=1表示收到数据了,然后从SPI_DR也是RDR读出数据A1 ,这是第一个接收到的数据,接收之后软件清除RXNE标志位,然后当下一个数据2收到之后,RXNE重新置1,我们监测到RXNE=1时,就继续读出RDR,这是第二个数据A2 。
最后在最后一个字节时序完全产生之后,数据3才能收到,所以数据3,直到这里才能读出来,
然后注意,一个字节波形收到后,移位寄存器的数据自动转入RDR,会覆盖原有的数据,所以我们读出RDR要及时,比如A1这个数据收到之后,最迟你也要在这里把它读走,否则下一个数据A2覆盖A1,就不能实现连续数据流的接收了,这是整个发送和接收的流程这个交换的流程。这个连续传输,对效率要求很高,否则的话,我们更推荐下面这个非连续传输。
非连续传输


那我们看一下这个非连续传输和连续传输,有什么区别呢,
首先这个配置还是spi模式三,sck默认高电平,发送数据时如果检测到TXE=1了,TDR为空,就软件写入0xF1至SPI_DR,这时TDR的值变为F1,TXE变为0,目前移位寄存器也是空,所以这个F1会立刻转入移位寄存器,开始发送,波形产生并且,TXE置回1,表示你可以把下一个数据放在TDR里侯着了。
但是现在区别就来了,在连续传输这里,一旦TXE等于1了,我们就会把下个数据写到TDR里侯着这样是为了连续传输数据衔接更紧密,这样的话,流程就比较混乱,程序写起来比较复杂。
所以在非连续传输这里,TXE等于1了,我们不着急把下一个数据写进去,等待第一个字节时序结束,意味着接收第一个字节也完成了,这时接收的RXNE会置1。我们等待RXNE置1后,先把第一个接收到的数据读出来,之后再写入下一个字节数据,也就是这里的(软件等待TXE等于1,但是较晚写入0xf2SPI_DR),较晚写入TDR后,数据2开始发送,我们还是不着急写数据3,等到了这里,先把接收的数据2收着,再继续写入数据3。
数据3时序结束后,最后再接收数据3置换回来的数据。
我们的整个步骤:
- 💎第一步等待TXE为1,
- 💎第二步写入发送的数据至TDR,
- 💎第三步等待RXNE为1,
- 💎第四步读取RDR接收的数据,之后交换第二个字节,重复这四步。
非连续传输缺点

非连续传输缺点:就是在这个位置没有及时把下一个数据写入TDR候着,所以等到第一个字节时序完成后,第二个字节还没有送过来,那这个数据传输就会在这里等着,所以这里时钟和数据的时序,在字节与字节之间会产生间隙,拖慢了整体数据传输的速度这个间隙在SCK频率低的时候影响不大,但是在SCK频率非常高时,间隙拖后腿的现象就比较严重了,比如我这里用示波器看了一下,不同SCK频率间隙的影响。
不同SCK频率间隙的影响
256分频

这里有四个波形,SCK分频系数分别是264、128、28、56,先看一下最慢的,256分频,这个SCK频率是72M/26大概是280k。
图示上面是SCK信号,这里使用SPI模式0,所以默认低电平,下面是SS信号,低电平表示选中从机,这个波形是SPI非连续传输,交换五个字节的时序,SCK线,连续交换了五个字节,但是你几乎看不出字节与字节之间的间隙对,因为这个时钟频率比较慢,间隙时长也不大,所以在这个比较慢的波形看来,间隙对它的影响就可以忽略了。
128分频

图是128分频,SCK频率大概560k,这时就更明显的看出来字节之间的间隙了,字节和字节之间并不是严丝合缝的,这会降低整体的字节传输速度。但这个比例上看,这一点点间隙也可以忽略不计的。
2分频

我们直接看一下最快的二分频,这个SCK时钟频率是72M/2=36M,频率非常快,已经超过这个示波器的采样频率,所以每个字节的时钟已经看不完整了。这里可以看到间隙所占的时间比例,已经是数据传输的好几倍了,不能忽略间隙。
如果你忽略了间隙,那计算一下二分频的数据传输速率,应该是256分频的128倍,当你实测一下,它肯定达不到这么高,所以通过看这个波形我们就清楚了,如果你想在极限频率下,进一步提高数据传输速率,追求最高性能,那最好使用连续传输的操作逻辑,或者还要进一步采用DMA自动转运,这些方法效率都是非常高的。
软硬件波形对比

软硬件波形对比,这里上面是软件波形,下面是硬件波形。
这些和I2C的软件件波形对比其实都是差不多的,首先他们的数据变化趋势肯定是一样的,采样得到的数据也是一样的,I2C所描述的scl低电平期间数据变化,高电平期间数据采样,与SPI的SCK下降沿数据移出,上升沿数据移入,最终波形的表现形式都是一样的。
区别就是硬件波形,数据线的变化是紧贴SCK边沿的,而软件波形数据线的变化,在边沿后有一些延迟。只是硬件波形一般会紧贴边缘,软件波形一般只能在电平期间,不过最终都不会影响数据传输,不过软件波形如果能贴近边缘,我们还是贴近边缘,否则如果你等太久比较靠近下一个边沿,那数据也容易出错。













![B3735 [信息与未来 2018] 圣诞树](https://img-blog.csdnimg.cn/img_convert/a1d5ecf948d347cff7ee651139cbcdd7.png)