在真实系统为x86架构下,搭建arm64的虚拟开发环境。在该环境中直接下载打包项目依赖的python运行环境。
前言
随着国家信创环境的要求普及,基本和国家沾边的政企事业单位都换成了信创环境,即ARM64的cpu服务器,而且该类服务器是不连接公网的情况。而很多一般企业,开发者的环境基本是X86架构下的Windows。
本教程是在遇到python环境微服务需要部署到信创环境,依赖的很多包包括python自身如statsmodels,需对应arm架构的资源,才可导出到目标服务器运行。
部署准备
- 作者的环境是:Windows10 X86处理器架构的电脑。(其他环境类似,qemu下载对应版本照着变通下即可)
- QEMU模拟器:下载地址
- UEFI文件:下载地址
- 银河麒麟V10镜像(arm64系统镜像): 请自行下载,或通过本人打包的本项目全部资源下载。我的资源镜像为Kylin-Server-10-SP2-aarch64-Release-Build09-20210524.iso
资源打包下载地址
- 链接:csdn文件下载(多个分卷,共5卷,可进入作者空间下载)
- 压缩包预览

部署流程
1. 安装qemu软件
双击qemu安装文件进行安装 ,下一步下一步,选择指定路径即可。默认会安装到 C:\Program Files\qemu下.

2.命令行生成虚拟硬盘
- 进入cmd命令,win+r或者其他方式,进入到CMD命令窗口中。
- cmd进入到qemu安装目录:cd C:\Program Files\qemu
- 执行以下命令创建40G硬盘到指定目录,我这里是D:\VM\arm64\文件夹下。
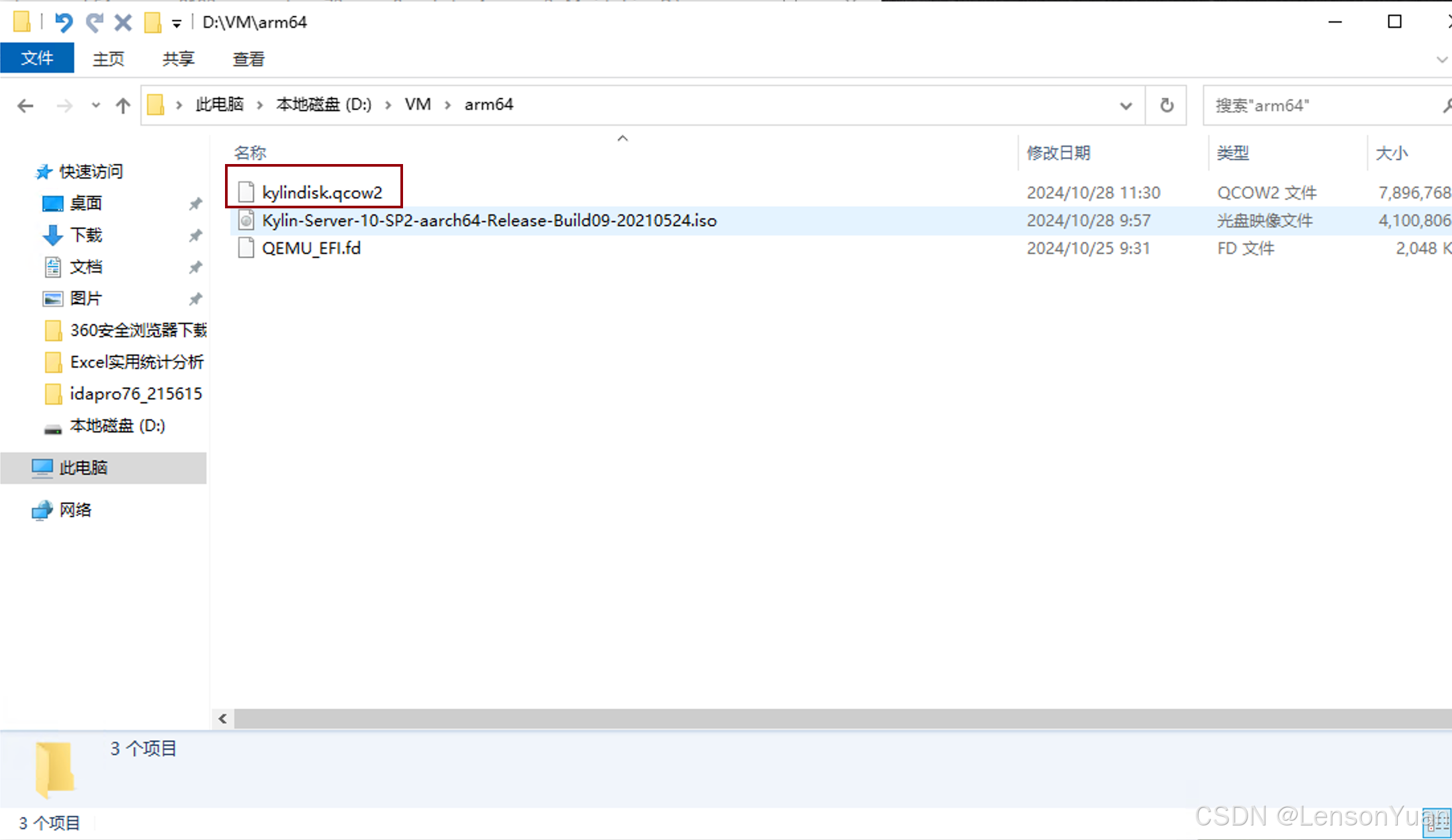
qemu-img create -f qcow2 D:\VM\arm64\kylindisk.qcow2 40G
4.生成的虚拟文件如下(框出的文件,其他文件是下载拷贝进去的,下一步有说明):
安装arm64位的系统
- 将下载好的fd引导文件和iso镜像文件,拷贝到生成虚拟磁盘的目录:D:\VM\arm64\
- 同样,使用cmd命令进入到qemu安装目录,cd C:\Program Files\qemu。
- 执行安装镜像安装命令(可以按需调整内存、端口等),里面有几个地址就是指向我们准备的虚拟硬盘、引导文件、镜像文件的。
qemu-system-aarch64.exe -m 8192 -cpu cortex-a72 -smp 8,sockets=4,cores=2 -M virt -bios D:\VM\arm64\QEMU_EFI.fd -device VGA -device nec-usb-xhci -device usb-mouse -device usb-kbd -drive if=none,file=D:\vm\arm64\kylindisk.qcow2,id=hd0 -device virtio-blk-device,drive=hd0 -drive if=none,file=D:\VM\arm64\Kylin-Server-10-SP2-aarch64-Release-Build09-20210524.iso,id=cdrom,media=cdrom -device virtio-scsi-device -device scsi-cd,drive=cdrom -net nic -net user,hostfwd=tcp::2222-:22
截图如下:
-
命令解释说明
这条命令是用于在QEMU中启动一个ARM架构的虚拟机。
基本配置-
qemu-system-aarch64.exe: 这是 QEMU 模拟器的主程序,用于模拟 ARM64 架构的系统。
-
-m 8192: 分配 8192 MB(即 8 GB)的内存给虚拟机。
-
-cpu cortex-a72: 指定虚拟机的 CPU 类型为 Cortex-A72。
-
-smp 8,sockets=4,cores=2: 配置虚拟机的 SMP(对称多处理)设置:
-
8: 总共 8 个 CPU 线程。
-
sockets=4: 4 个 CPU 插槽。
-
cores=2: 每个插槽有 2 个核心。
-
-
-M virt: 使用 virt 机器类型,这是 QEMU 为 ARM64 架构提供的虚拟机类型。
BIOS 和启动设备
- -bios D:\VM\arm64\QEMU_EFI.fd: 指定 EFI 固件文件,用于引导虚拟机。
设备配置
-
-device VGA: 添加一个 VGA 设备,用于图形输出。
-
-device nec-usb-xhci: 添加一个 NEC USB 3.0 控制器设备。
-
-device usb-mouse: 添加一个 USB 鼠标设备。
-
-device usb-kbd: 添加一个 USB 键盘设备。
存储设备
-
-drive if=none,file=D:\vm\arm64\kylindisk.qcow2,id=hd0: 配置一个虚拟硬盘,文件为 kylindisk.qcow2,ID 为 hd0,但不直接连接到接口。
-
-device virtio-blk-device,drive=hd0: 将之前配置的虚拟硬盘 hd0 连接到 virtio-blk 设备。
-
-drive if=none,file=D:\VM\arm64\Kylin-Server-10-SP2-aarch64-Release-Build09-20210524.iso,id=cdrom,media=cdrom: 配置一个虚拟光驱,文件为 Kylin-Server-10-SP2-aarch64-Release-Build09-20210524.iso,ID 为 cdrom,媒体类型为 cdrom。
-
-device virtio-scsi-device: 添加一个 virtio-scsi 控制器设备。
-
-device scsi-cd,drive=cdrom: 将之前配置的虚拟光驱 cdrom 连接到 scsi-cd 设备。
网络配置
-
-net nic: 添加一个网络接口卡。
-
-net user,hostfwd=tcp::2222-:22: 使用用户模式网络,并将主机端口 2222 转发到虚拟机端口 22(SSH 端口)。
-
执行命令后会跳到可视化界面进行系统安装
- 标准的linux系统安装引导界面,按思路安装即可。中间要设置下root密码和点选下虚拟硬盘即可。后面就是漫长等待,一路向下8G内存下大概30分钟。截图如下:




- 注意事项
- 安装设置时要注意,常见的配置,如时区、语言、虚拟硬盘、root密码等。
- 安装界面鼠标无法控制,可以按上面的提示释放鼠标,并选择最大化窗口,即可正常操作。
- 有感叹号的地方都要选择或设置,比如下图许可。

- 安装完成截图如下(默认账户是root,密码是你自己设置的):

系统的使用
- 安装好并关闭后,我们需要再次启动的话(无需指定iso文件启动)
使用cmd命令行进入到qemu所在位置,执行以下命令:
qemu-system-aarch64 -m 8192 -cpu cortex-a72 -smp 8,sockets=4,cores=2 -M virt -bios D:\VM\arm64\QEMU_EFI.fd -device VGA -device nec-usb-xhci -device usb-mouse -device usb-kbd -drive if=none,file=D:\vm\arm64\kylindisk.qcow2,id=hd0 -device virtio-blk-device,drive=hd0 -net nic -net user,hostfwd=tcp::2222-:22
- 我们已经做过端口映射了,直接通过宿主机ip:2222,通过ssh可以链接到服务器。

- 验证系统是否为arm64的架构。

- 如果要新增其他外部端口访问,请在启动命令行中添加端口即可,例如添加8888端口的宿主机访问。…hostfwd=tcp::2222-:22 ,hostfwd=tcp::8888-:8888,用逗号间隔即可。
另外,光开放外部端口访问可能还不行,还需要关闭虚拟机的防火墙,linux命令如下:
# 永久关闭防火墙
systemctl disable firewalld
# 查询防火墙状态
systemctl status firewalld