背景介绍:为了利用小米电机,搭建机械臂的关节,需要学习小米电机的使用方法。计划采用STM32驱动小米电机,实现指定运动,为此需要了解他们之间的通信方式,指令写入方法等。花了很多时间学习,但网络上相关资料很少,且对于我这类基础一般的同学,注释不够详细。为此,我认真研读了电机的说明书,参考相关的博文,实现了电机的CAN通信,特作此记录。
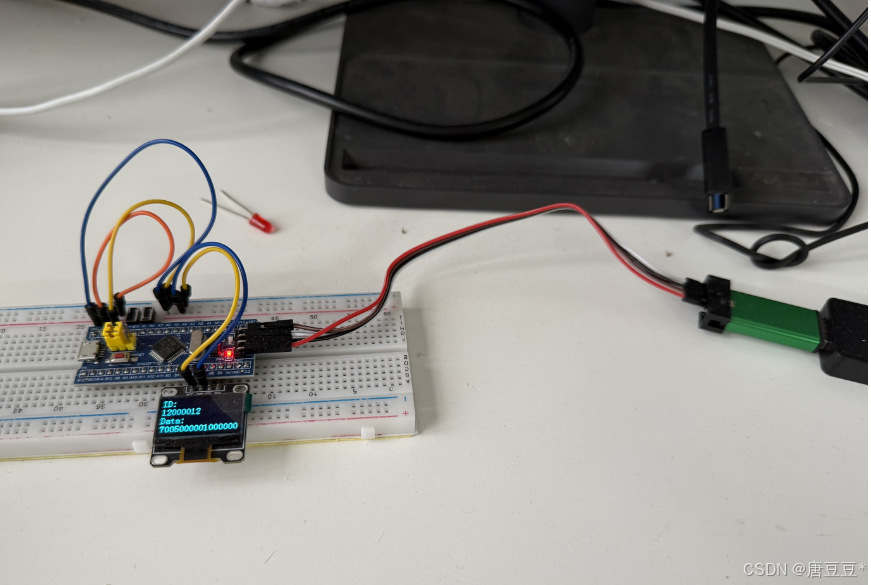
一、环回测试接线图
元件:ST-Link , STM32F103C8T6, 显示屏, 按键开关*2
二、CAN通信实现过程
1.CAN收发
需要设计一个CAN的报文输入与报文接收的函数,以用来进行数据收发,这里前面已经实现了
STM的CAN通信学习_stmcan通讯-CSDN博客
2.小米电机协议转化
需要弄清楚小米电机的CAN通讯协议类型,封装成相应的函数,再结合CAN收发函数进行对应的指令发送以及接收
1)小米电机通信:CAN 2.0通信接口,波特率为1Mbps,采用的扩展帧格式
2)小米电机通信相应的数据格式如下:
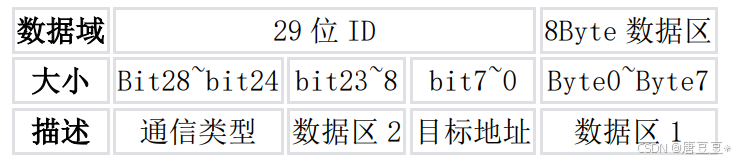
结合说明书可以得到具体通信指令对应关系如下:
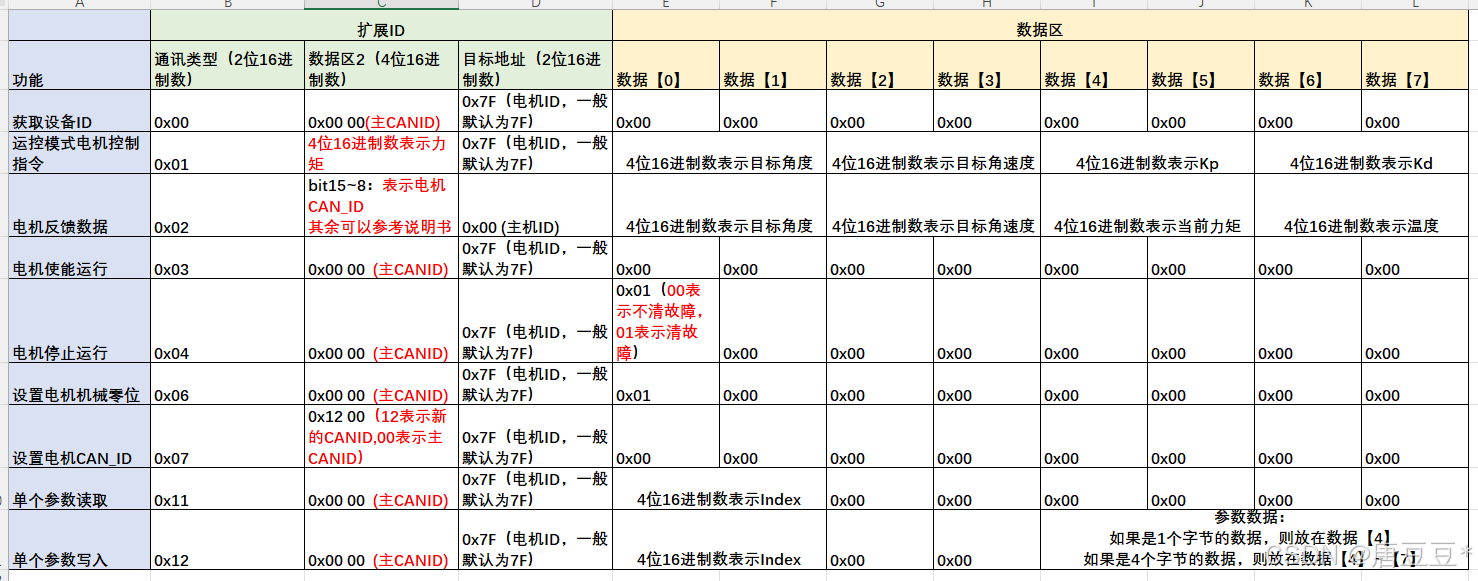
参照小米电机的说明书内容,29位扩展ID中,Bit28~Bit24用来表示通信类型,说明书关于通信类型包括10种,具体解释与对应关系如下:
//控制命令宏定义,与说明书对应
//获取设备ID(通信类型为0)
#define Communication_Type_GetID 0x00 //获取设备的ID和64位MCU唯一标识符
//运控模式电机控制指令(通信类型为1)
#define Communication_Type_MotionControl 0x01 //用来向主机发送控制指令
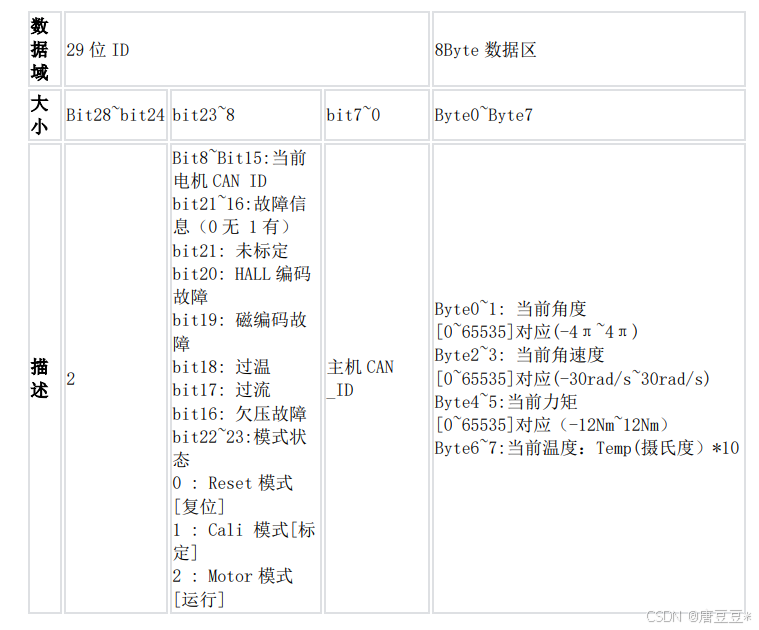
//电机反馈数据(通信类型为2)
#define Communication_Type_MotorRequest 0x02 //用来向主机反馈电机运行状态
//电机使能运行(通信类型为3)
#define Communication_Type_MotorEnable 0x03 //电机使能运行
//电机停止运行(通信类型为4)
#define Communication_Type_MotorStop 0x04 //电机停止运行
//电机机械零位(通信类型为6)
#define Communication_Type_SetPosZero 0x06 //设置电机机械零位
//更改电机的CAN_ID(通信类型为7)
#define Communication_Type_CanID 0x07 //更改当前电机CAN_ID
//单个参数读取(通信类型为17,即0x11)
#define Communication_Type_GetSingleParameter 0x11 //读取单个参数
//单个参数写入(通信类型为18,即0x12)
#define Communication_Type_Control_Mode 0x12
#define Communication_Type_SetSingleParameter 0x12 //设定单个参数
//故障反馈帧(通信类型为21,即0x15)
#define Communication_Type_ErrorFeedback 0x15 //故障反馈帧当要利用STM32发送时,要结合说明书的不同通信类型对应的数据格式,整理获取扩展ID(29位)和对应的数据内容(8Byte)。
例如:下图为获取设备ID的协议使用说明,根据其特点,可以写成扩展ID如下:
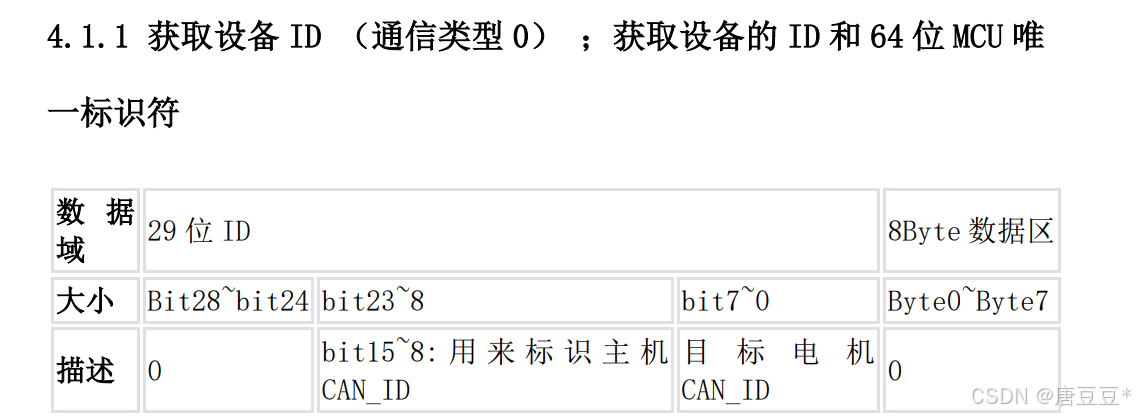
//扩展ID由通信类型+主CANID+目标电机ID
txMsg.ExtId = Communication_Type_GetID<<24|Master_CAN_ID<<8|ID;利用上述方法,参照说明书可以获得所有通讯协议的扩展ID的写法,只要对应的按位填上数据即可。同理也可以写出对应的数据区参数。则可以逐一写出各个函数,实现与小米电机的CAN通信。
三、代码实现与解释说明
1.CAN收发
==》MyCAN.c文件,包括初始化、发送报文、接收报文函数。
1) 初始化函数:MyCAN_Init()
用来初始化CAN,注意里面的引脚和工作模式,以及相应的波特率设置可以按照控制元件要求修改。这里有一个FIFO0,要与后面接收数据时的FIFO对应。初始化的流程与GPIO口初始化流程类似:开启时钟——定义结构体——调用初始化函数
/**************************************
cMyCAN_Init CAN 初始化函数
Param:No
Init Pin:GPIOA P11 CAN_RX,输入引脚是A11
GPIOA P12 CAN_TX,输出引脚是A12
**************************************/
void MyCAN_Init(void)
{
/**********************开启GPIOA和CAN1时钟************************************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//启用GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//启用CAN1时钟
/***********************初始化GPIOA的12号引脚,CAN 输出***********************/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//模式为复用推挽输出,注意如果要用作CAN通信,需要选择复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//12号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//引脚速度
GPIO_Init(GPIOA, &GPIO_InitStructure);//引脚初始化
/*********************初始化GPIO的11号引脚,CAN输入***************************/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*************************初始化CAN1控制器************************************/
CAN_InitTypeDef CAN_InitStructure;//定义一个CAN的结构体
/*CAN工作模式选择
CAN_Mode_Normal ((uint8_t)0x00) 正常模式
CAN_Mode_LoopBack ((uint8_t)0x01) 环回模式
CAN_Mode_Silent ((uint8_t)0x02) 静默模式,只听不发
CAN_Mode_Silent_LoopBack ((uint8_t)0x03) 环回静默模式*/
CAN_InitStructure.CAN_Mode = CAN_Mode_LoopBack;//CAN工作模式为环回模式,用于自收自发测试用,实际通信时可以改成正常模式
/*波特率计算
波特率 = 36M(时钟频率) / 48 (预分频器的值)/ (1 + 2(BS1)+ 3(BS2)) = 125K */
CAN_InitStructure.CAN_Prescaler = 48; //预分频器的值为48
CAN_InitStructure.CAN_BS1 = CAN_BS1_2tq;//BS1的时间长度,1-16tq
CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;//BS2的时间长度,1-8tq
CAN_InitStructure.CAN_SJW = CAN_SJW_2tq;//SJW的时间长度,1-4tq
CAN_InitStructure.CAN_NART = DISABLE;//DISABLE,表示寄存器置0,表示自动重传,这个功能叫做不自动重传,一般系统默认是自动重传
CAN_InitStructure.CAN_TXFP = DISABLE;//发送邮箱优先级,DISABLE置零,ID小的先发送,如果是ENABLE置一,先进先出
CAN_InitStructure.CAN_RFLM = DISABLE;//禁用FIOF锁定,溢出后,新报文覆盖最后一个报文,如果是ENABLE,则溢出时新报文丢弃
CAN_InitStructure.CAN_AWUM = DISABLE;//DISABLE 手动唤醒,ENABLE 自动唤醒
CAN_InitStructure.CAN_TTCM = DISABLE;//关闭时间触发通信
CAN_InitStructure.CAN_ABOM = DISABLE;//DISABLE 手动恢复,ENABLE 自动恢复(离线自动恢复)
CAN_Init(CAN1, &CAN_InitStructure);//初始化CAN
/*****************************初始化CAN过滤器*********************************/
CAN_FilterInitTypeDef CAN_FilterInitStructure;//定义CAN过滤器结构体
CAN_FilterInitStructure.CAN_FilterNumber = 0;//过滤器编号,0-13
/*几种不同的
16位列表模式,四个参数分别存入一组ID即可,共四个16位ID列表
屏蔽模式:IDHIGH存入第一组ID,MaskIDHIGH存入对应的屏蔽位,共两组16位ID和两组屏蔽位
32位列表模式:IDHIGH和IDLOW组合成一个32位ID,MaskIDHIGH和MaskIDLOW组成第二组32位ID
32位频闭模式:IDHIGH和IDLOW组合成一个32位ID,MaskIDHIGH和MaskIDLOW组成第二组32位屏蔽位
*/
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;//高16位
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;//低16位
CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
//选则相应模式为32位屏蔽模式
CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;//过滤器位宽,32位或者16位,这里是32位
CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;//过滤器模式,CAN_FilterMode_IdMask 屏蔽模式 CAN_FilterMode_IdList 列表模式
CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;//配置过滤器关联,这里有两个CAN_Filter_FIFO0,CAN_Filter_FIFO1
CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;//激活过滤器
CAN_FilterInit(&CAN_FilterInitStructure);//初始化过滤器
}
2.发送报文函数:MyCAN_Transmit(TxID, TxLength, TxData)
发送报文,发送报文的时候,先定义一个CanTxMsg结构体,说明其ID形式,注意小米电机用的是这里如果设计为标准ID,后面环回接收时,IDtype对应数值位0,设计为扩展ID,则环回接收时,IDtype对应数值为1,以便用于区分不同的ID类型。
/*************************************
Name:MyCAN_Transmit CAN 发送报文
Param: ID ID是32位,便于后面使用扩展帧
Length 数据长度
*Data 数据指针
**************************************/
void MyCAN_Transmit(uint32_t ID, uint8_t Length, uint8_t *Data)
{
CanTxMsg TxMessage; //定义CanTxMsg结构体变量,表示待发送的报文
TxMessage.StdId = ID; //标准ID
TxMessage.ExtId = ID; //扩展ID
//TxMessage.IDE = CAN_Id_Standard; //扩展标志位,CAN_Id_Standard 标准ID ,CAN_Id_Extended扩展ID
TxMessage.IDE = CAN_Id_Extended; //扩展标志位,CAN_Id_Standard 标准ID ,CAN_Id_Extended扩展ID
TxMessage.RTR = CAN_RTR_Data; //遥控标志位,CAN_RTR_Remote 遥控帧, CAN_RTR_Data数据帧
TxMessage.DLC = Length; //数据段长度,传入的参数
//把形参DATA传过来的数组赋值给TxMessage.Data
for (uint8_t i = 0; i < Length; i ++)
{
TxMessage.Data[i] = Data[i];//将传入的Data数组的值赋值给结构体的Data,他们都是8字节的数组
}
//请求发送报文函数
//CAN_Transmit的原理:选择空发送邮箱——如果邮箱有空位,则将报文写入指定寄存器——TXRQ置1,请求发送
uint8_t TransmitMailbox = CAN_Transmit(CAN1, &TxMessage);//请求发送结构体指向的报文,返回值是邮箱编号
uint32_t Timeout = 0;
//CAN_TransmitStatus表示返回传输状态函数,返回请求发送邮箱的邮箱状态,CAN_TxStatus_OK表示发送成功
//等待函数返回OK,当CAN1的邮箱状态为CAN_TxStatus_Ok表示发送成功,如果不成功则进入循环
while (CAN_TransmitStatus(CAN1, TransmitMailbox) != CAN_TxStatus_Ok)
{
Timeout ++;
//如果大于超时时间,则跳出循环
if (Timeout > 100000)
{
break;
}
}
}3)接收报文函数:MyCAN_Receive(&RxID, &RxLength, RxData, &RxIDtype)
函数里面的IDtype参数用于到显示屏幕上,验证发送的ID类型是标准ID还是扩展ID。首先定义一个接收报文的结构体,判断收到的数据是标准ID还是扩展ID,再获取ID值。如果是数据帧,则还需要逐个字节获取。
/****************************************
Name:MyCAN_ReceiveFlag
Param:
函数用于判断接收FIFO里是否有报文,返回值为表示有报文,返回值为0表示没有报文
*****************************************/
uint8_t MyCAN_ReceiveFlag(void)
{
if (CAN_MessagePending(CAN1, CAN_FIFO0) > 0)//如果大于零,表明FIFO0里面有报文,此处的FIFO0与前面的设置一致
{
return 1;
}
return 0;
}
/*****************************************
@brief: 接收 CAN message
@param: *ID the ID,用于做返回值
*Length the length of DATA,用于做返回值
*DATA the Data of CAN massage
注意,接收信息是需要输出参数,但C语言不支持多个值输出,
所以这里用指针表示,可以通过函数修改相应的值
*****************************************/
void MyCAN_Receive(uint32_t *ID, uint8_t *Length, uint8_t *Data,uint8_t *IDtype)
{
CanRxMsg RxMessage;//定义一个CanRxMsg结构体,用于存放接收报文
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//接收报文
//判断接收的报文是标准ID还是扩展ID
if (RxMessage.IDE == CAN_Id_Standard)
{
*IDtype=0;//表示接受的是标准帧
*ID = RxMessage.StdId;//标准ID
}
else
{
*IDtype=1;//表示接收的是扩展帧
*ID = RxMessage.ExtId; //扩展ID
}
//判断接收报文是否为数据帧还是遥控帧
if (RxMessage.RTR == CAN_RTR_Data)//是否为数据帧
{
//数据帧
*Length = RxMessage.DLC;//数据长度
//数据内容
for (uint8_t i = 0; i < *Length; i ++)
{
Data[i] = RxMessage.Data[i];
}
}
else
{
//遥控帧,暂时不做处理
}
}2.小米电机相应指令函数
0)获取设备ID
/*—————————————————————————————————————————————————————————————————————————————————*/
/** @brief 小米电机ID检查,通信类型为0
* @param[in] id: 控制电机CAN_ID【出厂默认0x7F】
**/
void check_cybergear(uint8_t ID)
{
uint8_t tx_data[8] = {0};//没有数据
//扩展ID的组合,依旧是3个部分
txMsg.ExtId = Communication_Type_GetID<<24|Master_CAN_ID<<8|ID;
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}1)运控模式电机控制指令
/*——————————————————————————————————————————————————————————————————————————————————*/
/** @brief 小米运控模式指令,通信类型:1
* @param[in] Motor: 目标电机结构体
* @param[in] torque: 力矩设置[-12,12] N*M
* @param[in] MechPosition: 位置设置[-12.5,12.5] rad
* @param[in] speed: 速度设置[-30,30] rpm
* @param[in] kp: 比例参数设置
* @param[in] kd: 微分参数设置
* @retval none
**/
void motor_controlmode(MI_Motor *Motor,float torque, float MechPosition, float speed, float kp, float kd)
{
uint8_t tx_data[8]={0};//发送数据初始化
//装填发送数据
//将目标角度转化为16位2进制数,对应字节0~1,假设是0x1234
tx_data[0]=float_to_uint(MechPosition,P_MIN,P_MAX,16)>>8; //取得是高位的结果,即0x12
tx_data[1]=float_to_uint(MechPosition,P_MIN,P_MAX,16); //取得是低位的结果,即0x34
//将目标速度转化为16位2进制数,对应字节2~3
tx_data[2]=float_to_uint(speed,V_MIN,V_MAX,16)>>8;
tx_data[3]=float_to_uint(speed,V_MIN,V_MAX,16);
//目标KP
tx_data[4]=float_to_uint(kp,KP_MIN,KP_MAX,16)>>8;
tx_data[5]=float_to_uint(kp,KP_MIN,KP_MAX,16);
//目标KD
tx_data[6]=float_to_uint(kd,KD_MIN,KD_MAX,16)>>8;
tx_data[7]=float_to_uint(kd,KD_MIN,KD_MAX,16);
txMsg.ExtId = Communication_Type_MotionControl<<24|float_to_uint(torque,T_MIN,T_MAX,16)<<8|Motor->CAN_ID;//装填扩展帧数据
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}这里面有一个将浮点数转化为16位二进制数的函数,float_to_uint,其中对应的参数上下限在.h文件中进行了定义,其对应范围是0~65535,也就是0~2^16-1
其中的参数范围定义如下,这个地方不能修改,只能参照说明书定义:
/*****************控制参数最值,谨慎更改*********************/
#define P_MIN -12.56f
#define P_MAX 12.56f
#define V_MIN -30.0f
#define V_MAX 30.0f
#define KP_MIN 0.0f
#define KP_MAX 500.0f
#define KD_MIN 0.0f
#define KD_MAX 5.0f
#define T_MIN -12.0f
#define T_MAX 12.0f
#define MAX_P 720
#define MIN_P -7202)电机反馈数据
电机反馈数据里面,我们需要读取的就是这几项:电机的ID号,电机的角度,电机的角速度,电机的力矩,电机的温度;根据下图,可以知道接收到的信息的具体位置,进而编写出程序如下:
/*——————————————————————————————————————————————————————————————————————————————————————*/
/** @brief 电机反馈数据,通信类型2
* @param[in] 信息存放的地址
* @retval none
*/
void Rx_Fifo0_Msg(MI_Motor *Motor)
{
if (MyCAN_ReceiveFlag())//判断是否接收到报文信息
{
uint32_t RxID;
uint8_t RxLength;
uint8_t RxData[8];
//接收信息放到对应的接收报文之中
MyCAN_Receive(&RxID, &RxLength, RxData);
Motor->CAN_ID=(RxID&0xFFFF)>>8;//获取接收数据的ID:保留低16位,其余全变成零,再右移8位,则获得了bit8~bit15的canid
Motor->Angle=uint16_to_float(RxData[0]<<8|RxData[1],MIN_P,MAX_P,16);//将字节0~1转化位浮点数,即为当前角度
Motor->Speed=uint16_to_float(RxData[2]<<8|RxData[3],V_MIN,V_MAX,16);//将字节2~3转化位浮点数,即为当前速度
Motor->Torque=uint16_to_float(RxData[4]<<8|RxData[5],T_MIN,T_MAX,16);//将字节4~5转化位浮点数,即为当前角度
Motor->Temp=(RxData[6]<<8|RxData[7])*Temp_Gain;//将字节4~5转化为当前温度
Motor->error_code=(RxID&0x1F0000)>>16;
}
}3)电机使能运行
/*****************************使能电机,通信类型为3*******************************
* @brief 使能小米电机
* @param[in] Motor:对应控制电机结构体
* @retval none
*****************************************************/
void start_cybergear(MI_Motor *Motor)
{
uint8_t tx_data[8] = {0};
txMsg.ExtId = Communication_Type_MotorEnable<<24|Master_CAN_ID<<8|Motor->CAN_ID;
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}4) 电机停止运行
注意当数据区的Byte[0]=1时,表示清故障
/************************电机停止运行,通信类型为4********************************
* @brief 停止电机
* @param[in] Motor:对应控制电机结构体
* @param[in] clear_error:清除错误位(0 不清除 1清除)
* @retval None
*******************************************************************************/
void stop_cybergear(MI_Motor *Motor,uint8_t clear_error)
{
uint8_t tx_data[8]={0};
tx_data[0]=clear_error;//清除错误位设置
txMsg.ExtId = Communication_Type_MotorStop<<24|Master_CAN_ID<<8|Motor->CAN_ID;
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}
6)设置电机机械零位
/**********************设计电机的零点,通信类型6***************************
* @brief 设置电机零点
* @param[in] Motor: 电机结构体
* @retval none
***********************************************************/
void set_zeropos_cybergear(MI_Motor *Motor)
{
uint8_t tx_data[8]={0};
tx_data[0] = 1;//数据区为1
//扩展帧格式
txMsg.ExtId = Communication_Type_SetPosZero<<24|Master_CAN_ID<<8|Motor->CAN_ID;
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}7)设置电机的CAN_ID
/**********************设置电机的CAN_ID,通信类型为7********************
* @brief 设置电机CANID
* @param[in] Motor: 电机结构体
* @param[in] Motor: 设置新ID
* @retval none
**********************************************************************/
void set_CANID_cybergear(MI_Motor *Motor,uint8_t CAN_ID)
{
uint8_t tx_data[8]={0};
txMsg.ExtId = Communication_Type_CanID<<24|CAN_ID<<16|Master_CAN_ID<<8|Motor->CAN_ID;
Motor->CAN_ID = CAN_ID;//将新的ID导入电机结构体
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}17) 单个参数读取
/*************************单个参数读取,通信类型17******************
*@brief 电机参数读取
*@param[in] ID,电机的ID号
*/
void check_param_cybergear(MI_Motor *Motor, uint_8 index)
{
uint8_t tx_data[8]={0}
txMsg.ExtId = Communication_Type_GetSingleParameter<<24|Master_CAN_ID<<8|Motor->CAN_ID;//装填扩展帧数据
tx_data[0]=index>>8;//高8位
tx_data[1]=index;//低8位
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}其中的index为说明书里面的参数列表中的值
/******************参数读取宏定义,Index***********************/
#define Run_mode 0x7005 //运动模式
#define Iq_Ref 0x7006 //电流模式指令
#define Spd_Ref 0x700A //转速模式转速
#define Limit_Torque 0x700B //转矩限制
#define Cur_Kp 0x7010 //电流的kp
#define Cur_Ki 0x7011 //电流的ki
#define Cur_Filt_Gain 0x7014 //电流滤波系数
#define Loc_Ref 0x7016 //位置模式角度指令
#define Limit_Spd 0x7017 //位置模式速度限制
#define Limit_Cur 0x7018 //速度位置模式电流限制
#define mechPos 0x7019 //负载端计圈机械角度
#define iqf 0x701A //iq滤波值
#define mechVel 0x701B //负载端转速
#define VBUS 0x701C //母线电压
#define rotation 0x701D //圈数
#define loc_kp 0x701E //位置的kp
#define spd_kp 0x701F //速度的kp
#define spd_ki 0x7020 //速度的ki
18) 写入单个参数
/******************对应说明书的单个参数写入,通信类型为18*************
* @brief 写入电机参数
* @param[in] Motor:对应控制电机结构体
* @param[in] Index:写入参数对应地址
* @param[in] Value:写入参数值
* @param[in] Value_type:写入参数数据类型,可以对照字节数进行区分
* @retval none
*/
static void Set_Motor_Parameter(MI_Motor *Motor,uint16_t Index,float Value,char Value_type){
uint8_t tx_data[8]={0};//写入的数据
//扩展ID,包括三个部分:通信类型、主ID、电机ID
txMsg.ExtId = Communication_Type_SetSingleParameter<<24|Master_CAN_ID<<8|Motor->CAN_ID;
//参见说明书的通信类型18里面,Index的相关应用方法,Index共
tx_data[0]=Index>>8; //高8位
tx_data[1]=Index; //低8位
tx_data[2]=0x00;
tx_data[3]=0x00;
//如果参数类型为浮点型,则对应的数据所占字节数为4,对应的数据需要转化为8个字节
if(Value_type == 'f'){
Float_to_Byte(Value);//将数值转化为4个byte 作为返回值
tx_data[4]=byte[0];//高8位
tx_data[5]=byte[1];
tx_data[6]=byte[2];
tx_data[7]=byte[3];//低8位
}
//如果参数类型为uint8,只有一个字节
else if(Value_type == 's'){
tx_data[4]=(uint8_t)Value;
tx_data[5]=0x00;
tx_data[6]=0x00;
tx_data[7]=0x00;
}
//can_txd();
MyCAN_Transmit(txMsg.ExtId,txMsg.DLC,tx_data);//写入指令
}此外还有几个转化函数
/*———————————————————————————————————————————————————————————————————————————————————————*/
/** @brief 小米电机回文16位数据转浮点
* @param[in] x:16位回文 x_min:对应参数下限
x_max:对应参数上限 bits:参数位数
* @retval 返回浮点值
**/
static float uint16_to_float(uint16_t x,float x_min,float x_max,int bits)
{
uint32_t span = (1 << bits) - 1;//二进制数的范围2^bits-1
float offset = x_max - x_min;//实际范围
return offset * x / span + x_min;//转换为浮点数
}
/*———————————————————————————————————————————————————————————————————————————————————*/
/** @brief 小米电机发送浮点转16位数据
每个数据都是2个字节也就是16位二进制数
* static 表示其作用域仅限于这个文件
*/
static int float_to_uint(float x, float x_min, float x_max, int bits)
{
float span = x_max - x_min;//浮点数的范围
float offset = x_min;
//限制X的范围
if(x > x_max) x=x_max;
else if(x < x_min) x= x_min;
return (int) ((x-offset)*((float)((1<<bits)-1))/span);//(x-下限)/((2^bits-1)/范围)
}
/*————————————————————————————————————————————————————————————————————————————————————*/
/** @brief 浮点数转4字节函数,这个用于写入参数时使用
*/
static uint8_t* Float_to_Byte(float f)
{
unsigned long longdata = 0;//无符号长整型
longdata = *(unsigned long*)&f; //取f的地址,将该地址强制转化为无符号长整型指针,通过*解引用,获得该地址处的值
byte[0] = (longdata & 0xFF000000) >> 24;//将最高8位提出来
byte[1] = (longdata & 0x00FF0000) >> 16;//将第二个高8位提出来
byte[2] = (longdata & 0x0000FF00) >> 8;//将第三个高8位提出来
byte[3] = (longdata & 0x000000FF);//将第四个高8位提出来
return byte;//返回的byte为四个字节的数组
}3.主函数main.c 对相应的函数进行调用与验证
#include "main.h"
#include "cybergear.h"
/*******************小米电机的控制***************/
/*
*v1:目前已经把小米电机的库程序建立起来,开始进行验证,已经验证的程序有:初始化和使能函数2024.10.7
*/
uint8_t KeyNum;
uint32_t RxID;
uint8_t RxLength;
uint8_t RxData[8];
uint8_t RxIDtype;
MI_Motor Cyber;
uint8_t Motor_ID=0x7F;
uint8_t Mode=Motion_mode;//控制模式为运动控制
uint32_t id;
SM_Param M_set;
int main(void)
{
//初始化
OLED_Init();
Key_Init();//按键初始化,按键对应的引脚分别位B1和B11
MyCAN_Init();//CAN初始化,CAN对应的引脚位A11和A12,A11输入,A12输出
//以下用于调用程序验证相应的通信数据是否准确
init_cybergear(&Cyber, Motor_ID, Mode);//初始化电机
//*校验用的内容
id=check_cybergear(Cyber.CAN_ID);//小米电机ID检查,通信类型为0
/*此处验证程序为运控模式的电机控制:motor_controlmode
*扩展ID显示为01 BFFF 7F;其中01为通讯类型,BFFF为力矩;7F为电机ID号
*数据为9001 BFFF 3851 428F 分别表示目标角度、目标角速度、对应KP,对应KD
*/
//OLED_ShowHexNum(1, 1, Cyber.CAN_ID,2);
M_set.Position=pi/2;//带入程序数据的计算结果为36865,映射到16进制为9001
M_set.Speed=15;//45/60*65535=49151,转换为16进制是BFFF
M_set.Kp=110;//110/500*65535=14417,转换为16进制是3851
M_set.Kd=1.3;//1.3/5*65535=17039,转换为16进制是428F
M_set.Torque=6;//映射到区域为(6-(-12))/(12-(-12))=3/4;3/4*65535=49151;49151转化为16进制为BFFF
motor_controlmode(&Cyber,M_set.Torque, M_set.Position, M_set.Speed, M_set.Kp, M_set.Kd);
//使能验证
//扩展ID为:03 0000 7F
//数据为:0000 0000 0000 0000
start_cybergear(Cyber.CAN_ID);//使能小米电机,通信类型为3
//停止验证
//第二个参数为清除错误位,0表示不清除,1表示清除
//扩展ID为:04 0000 7F
//数据为:0000 0000 0000 0000/0100 0000 0000 0000
stop_cybergear(&Cyber,1);
//置零验证
//扩展ID为:06 0000 7F
//数据为:0100 0000 0000 0000
set_zeropos_cybergear(&Cyber);
//设置电机的ID号
//扩展ID为:07 1200 7F
//数据:0000 0000 0000 0000
Motor_ID=0x12;
set_CANID_cybergear(&Cyber,Motor_ID);
//读取单个参数
//扩展ID:11 0000 12;其中0x11表示的十进制的17
//数据:7005 0000 0000 0000
Index index;
index=RunMode_idx;//0x7005
check_param_cybergear(&Cyber, index);
//设置电机模式
//扩展ID:12 0000 12
//数据:70 05 00 00 01 00 00 00
set_mode_cybergear(&Cyber,Position_mode);
//设置电机参数
//扩展ID:12 0000 12;其中0x12 表示十进制的18
//数据:70 05 00 00 01 00 00 00(1字节数据在byte4,其余数据为byte4~7)
Value_type value_typ;
value_typ=RunMode_Typ;
Set_Motor_Parameter(&Cyber,index,Position_mode,value_typ);
while (1)
{
}
}
利用显示器验证相应的发送指令,验证代码如下:
OLED_ShowString(1, 1, "ID:");//第3行第1列显示
OLED_ShowHexNum(2, 1, txMsg.ExtId,8 );
OLED_ShowString(3, 1, "Data:");//第3行第1列显示
for (int i=1;i<=8;i++)
{
OLED_ShowHexNum(4, i*2-1, tx_data[i-1],2 );
}本文电机函数的验证方法:逐个函数调用,然后通过屏幕显示指令进行验证,得到相应的显示结果与通讯协议的指令格式一致则表明函数无误。
本文参考了博文、视频教程:小米电机CyberGear STM32HAL 使用指南_小米电机瞬时电流串口指令-CSDN博客
[3-1] 单个设备环回测试&三个设备互相通信_哔哩哔哩_bilibili