🎯要点
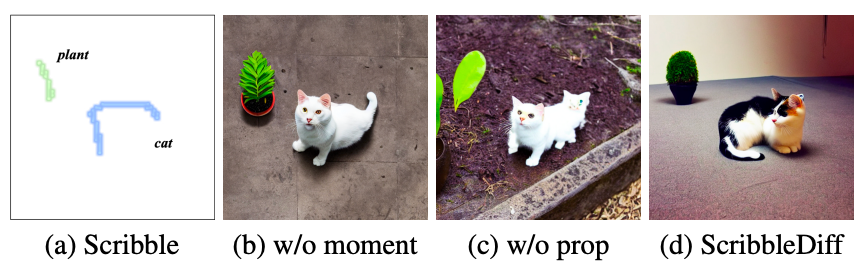
- 使用小规模磁态训练模型,并在二维三维爱德华兹-安德森模型上使用四种算法测试:贪婪算法、模拟退火算法、并行回火算法和本模型。
- 将磁态基态搜索视为马尔可夫决策过程 (MDP),学习最优策略以累积其最大回报。
- 设计图神经网络式编码器表征状态和动作。
- 模型求解非确定性多项式时间问题。
🍁磁态分析
- Python和MATLAB自旋玻璃投资组合神经网络广义方程

🍪语言内容分比


🍇Python马尔可夫决策过程策略选择
我们将要实现的马尔可夫决策过程是一个离散时间随机控制过程。它提供了一个数学框架,用于在结果部分随机、部分受决策者控制的情况下对决策进行建模。马尔可夫决策过程是一种对顺序决策问题进行建模的工具,其中决策者以顺序方式与环境进行交互。
假设问题是:我们有一个由 12 个状态组成的世界,1 个障碍初始状态(状态 5)和 2 个结束状态(状态 10、11)。对于每个状态,我们都有一个奖励,我们希望找到实施最佳奖励累积的策略。对于每个状态,奖励为 -0.04(r=-0.4)。对于状态 10,奖励为 1,对于结束状态 11,奖励为 -1。
1
4
7
10
2
5
8
11
3
6
9
12
\begin{array}{|l|l|l|l|} \hline 1 & 4 & 7 & 10 \\ \hline 2 & 5 & 8 & 11 \\ \hline 3 & 6 & 9 & 12 \\ \hline \end{array}
123456789101112
对于所处的每一个状态,我们都想找到最好的行动,是向北(N)、向南(S)、向东(E)还是向西(W)走。基本上,我们希望以最短的路到达状态 10。首先,让我们创建一个世界类,它将在我们的世界中用于解决问题。这个对象可以帮助我们声明世界、绘制世界并绘制我们发现的移动世界的策略。方法 plot_world 绘制了我们上面看到的图像,将使用值迭代方法代替策略迭代。
使用策略迭代求解马尔可夫决策过程,其中 γ = 0.9 和 r = 0.04。我们使用均匀随机策略初始化了策略迭代算法。并且分别使用 World 类的绘制值和绘制策略函数,将每次迭代步骤后的值函数和策略绘制成网格世界的两个不同图形,我们得到了以下结果:
初次迭代:网格世界值
−
0.287
−
0.169
0.05
1.0
−
0.354
−
0.479
−
1.0
−
0.402
−
0.451
−
0.524
−
0.696
\begin{array}{|l|l|l|l|} \hline-0.287 & -0.169 & 0.05 & 1.0 \\ \hline-0.354 & & -0.479 & -1.0 \\ \hline-0.402 & -0.451 & -0.524 & -0.696 \\ \hline \end{array}
−0.287−0.354−0.402−0.169−0.4510.05−0.479−0.5241.0−1.0−0.696
二次迭代:
0.509 0.649 0.795 1.0 0.398 0.486 − 1.0 0.291 0.207 0.168 − 0.009 \begin{array}{|l|l|l|c|} \hline 0.509 & 0.649 & 0.795 & 1.0 \\ \hline 0.398 & & 0.486 & -1.0 \\ \hline 0.291 & 0.207 & 0.168 & -0.009 \\ \hline \end{array} 0.5090.3980.2910.6490.2070.7950.4860.1681.0−1.0−0.009
三次迭代:
0.509
0.649
0.795
1.0
0.398
0.486
−
1.0
0.291
0.207
0.34
0.126
\begin{array}{|l|l|l|l|} \hline 0.509 & 0.649 & 0.795 & 1.0 \\ \hline 0.398 & & 0.486 & -1.0 \\ \hline 0.291 & 0.207 & 0.34 & 0.126 \\ \hline \end{array}
0.5090.3980.2910.6490.2070.7950.4860.341.0−1.00.126
四次迭代:
0.509
0.649
0.795
1.0
0.398
0.486
−
1.0
0.296
0.253
0.344
0.129
\begin{array}{|l|l|l|l|} \hline 0.509 & 0.649 & 0.795 & 1.0 \\ \hline 0.398 & & 0.486 & -1.0 \\ \hline 0.296 & 0.253 & 0.344 & 0.129 \\ \hline \end{array}
0.5090.3980.2960.6490.2530.7950.4860.3441.0−1.00.129
我们可以看到,经过 4 次迭代后我们得到了解,并且我们可以看到与上一次迭代相比,每次迭代的进展情况。如果使用值迭代,应该得到与策略迭代算法相同的结果。
世界类:
import numpy as np
import matplotlib.pyplot as plt
class World:
def __init__(self):
self.nRows = 3
self.nCols = 4
self.stateObstacles = [5]
self.stateTerminals = [10, 11]
self.nStates = 12
self.nActions = 4
def _plot_world(self):
nStates = self.nStates
nRows = self.nRows
nCols = self.nCols
stateObstacles = self.stateObstacles
stateTerminals = self.stateTerminals
coord = [[0, 0], [nCols, 0], [nCols, nRows], [0, nRows], [0, 0]]
xs, ys = zip(*coord)
plt.plot(xs, ys, "black")
for i in stateObstacles:
(I, J) = np.unravel_index(i, shape=(nRows, nCols), order='F')
coord = [[J, nRows - I],
[J + 1, nRows - I],
[J + 1, nRows - I + 1],
[J, nRows - I + 1],
[J, nRows - I]]
xs, ys = zip(*coord)
plt.fill(xs, ys, "0.5")
plt.plot(xs, ys, "black")
for ind, i in enumerate(stateTerminals):
(I, J) = np.unravel_index(i, shape=(nRows, nCols), order='F')
coord = [[J, nRows - I],
[J + 1, nRows - I],
[J + 1, nRows - I + 1],
[J, nRows - I + 1],
[J, nRows - I]]
xs, ys = zip(*coord)
plt.fill(xs, ys, "0.8")
plt.plot(xs, ys, "black")
plt.plot(xs, ys, "black")
X, Y = np.meshgrid(range(nCols + 1), range(nRows + 1))
plt.plot(X, Y, 'k-')
plt.plot(X.transpose(), Y.transpose(), 'k-')
@staticmethod
def _truncate(n, decimals=0):
multiplier = 10 ** decimals
return int(n * multiplier) / multiplier
def plot(self):
nStates = self.nStates
nRows = self.nRows
nCols = self.nCols
self._plot_world()
states = range(1, nStates + 1)
k = 0
for i in range(nCols):
for j in range(nRows, 0, -1):
plt.text(i + 0.5, j - 0.5, str(states[k]), fontsize=26, horizontalalignment='center', verticalalignment='center')
k += 1
plt.title('MDP gridworld', size=16)
plt.axis("equal")
plt.axis("off")
plt.show()
def plot_value(self, valueFunction):
nRows = self.nRows
nCols = self.nCols
stateObstacles = self.stateObstacles
self._plot_world()
k = 0
for i in range(nCols):
for j in range(nRows, 0, -1):
if k + 1 not in stateObstacles:
plt.text(i + 0.5, j - 0.5, str(self._truncate(valueFunction[k], 3)), fontsize=26, horizontalalignment='center', verticalalignment='center')
k += 1
plt.title('MDP gridworld', size=16)
plt.axis("equal")
plt.axis("off")
plt.show()
def plot_policy(self, policy):
nStates = self.nStates
nActions = self.nActions
nRows = self.nRows
nCols = self.nCols
stateObstacles = self.stateObstacles
stateTerminals = self.stateTerminals
policy = policy.reshape(nRows, nCols, order="F").reshape(-1, 1)
X, Y = np.meshgrid(range(nCols + 1), range(nRows + 1))
X1 = X[:-1, :-1]
Y1 = Y[:-1, :-1]
X2 = X1.reshape(-1, 1) + 0.5
Y2 = np.flip(Y1.reshape(-1, 1)) + 0.5
X2 = np.kron(np.ones((1, nActions)), X2)
Y2 = np.kron(np.ones((1, nActions)), Y2)
mat = np.cumsum(np.ones((nStates, nActions)), axis=1).astype("int64")
if policy.shape[1] == 1:
policy = (np.kron(np.ones((1, nActions)), policy) == mat)
index_no_policy = stateObstacles + stateTerminals
index_policy = [item - 1 for item in range(1, nStates + 1) if item not in index_no_policy]
mask = policy.astype("int64") * mat
mask = mask.reshape(nRows, nCols, nCols)
X3 = X2.reshape(nRows, nCols, nActions)
Y3 = Y2.reshape(nRows, nCols, nActions)
alpha = np.pi - np.pi / 2 * mask
self._plot_world()
for ii in index_policy:
ax = plt.gca()
j = int(ii / nRows)
i = (ii + 1 - j * nRows) % nCols - 1
index = np.where(mask[i, j] > 0)[0]
h = ax.quiver(X3[i, j, index], Y3[i, j, index], np.cos(alpha[i, j, index]), np.sin(alpha[i, j, index]), 0.3)
states = range(1, nStates + 1)
k = 0
for i in range(nCols):
for j in range(nRows, 0, -1):
plt.text(i + 0.25, j - 0.25, str(states[k]), fontsize=16, horizontalalignment='right', verticalalignment='bottom')
k += 1
plt.axis("equal")
plt.axis("off")
plt.show()
主程度:
from World import World
import numpy as np
import pandas as pd
import copy
def construct_p(world, p=0.8, step=-0.04):
nstates = world.get_nstates()
nrows = world.get_nrows()
obsacle_index = world.get_stateobstacles()
terminal_index = world.get_stateterminals()
bad_index = obsacle_index + terminal_index
rewards = np.array([step] * 4 + [0] + [step] * 4 + [1, -1] + [step])
actions = ["N", "S", "E", "W"]
transition_models = {}
for action in actions:
transition_model = np.zeros((nstates, nstates))
for i in range(1, nstates + 1):
if i not in bad_index:
if action == "N":
if i + nrows <= nstates and (i + nrows) not in obsacle_index:
transition_model[i - 1][i + nrows - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if 0 < i - nrows <= nstates and (i - nrows) not in obsacle_index:
transition_model[i - 1][i - nrows - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if (i - 1) % nrows > 0 and (i - 1) not in obsacle_index:
transition_model[i - 1][i - 1 - 1] += p
else:
transition_model[i - 1][i - 1] += p
if action == "S":
if i + nrows <= nstates and (i + nrows) not in obsacle_index:
transition_model[i - 1][i + nrows - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if 0 < i - nrows <= nstates and (i - nrows) not in obsacle_index:
transition_model[i - 1][i - nrows - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if 0 < i % nrows and (i + 1) not in obsacle_index and (i + 1) <= nstates:
transition_model[i - 1][i + 1 - 1] += p
else:
transition_model[i - 1][i - 1] += p
if action == "E":
if i + nrows <= nstates and (i + nrows) not in obsacle_index:
transition_model[i - 1][i + nrows - 1] += p
else:
transition_model[i - 1][i - 1] += p
if 0 < i % nrows and (i + 1) not in obsacle_index and (i + 1) <= nstates:
transition_model[i - 1][i + 1 - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if (i - 1) % nrows > 0 and (i - 1) not in obsacle_index:
transition_model[i - 1][i - 1 - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if action == "W":
if 0 < i - nrows <= nstates and (i - nrows) not in obsacle_index:
transition_model[i - 1][i - nrows - 1] += p
else:
transition_model[i - 1][i - 1] += p
if 0 < i % nrows and (i + 1) not in obsacle_index and (i + 1) <= nstates:
transition_model[i - 1][i + 1 - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
if (i - 1) % nrows > 0 and (i - 1) not in obsacle_index:
transition_model[i - 1][i - 1 - 1] += (1 - p) / 2
else:
transition_model[i - 1][i - 1] += (1 - p) / 2
elif i in terminal_index:
transition_model[i - 1][i - 1] = 1
transition_models[action] = pd.DataFrame(transition_model, index=range(1, nstates + 1), columns=range(1, nstates + 1))
return transition_models, rewards
def max_action(transition_models, rewards, gamma, s, V, actions, terminal_ind):
maxs = {key: 0 for key in actions}
max_a = ""
action_map = {k: v for k, v in zip(actions, [1, 3, 2, 4])}
for action in actions:
if s not in terminal_ind:
maxs[action] += rewards[s - 1] + gamma * np.dot(transition_models[action].loc[s, :].values, V)
else:
maxs[action] = rewards[s - 1]
maxi = -10 ** 10
for key in maxs:
if maxs[key] > maxi:
max_a = key
maxi = maxs[key]
return maxi, action_map[max_a]
def value_iteration(world, transition_models, rewards, gamma=1.0, theta=10 ** -4):
nstates = world.get_nstates()
terminal_ind = world.get_stateterminals()
V = np.zeros((nstates, ))
P = np.zeros((nstates, 1))
actions = ["N", "S", "E", "W"]
delta = theta + 1
while delta > theta:
delta = 0
v = copy.deepcopy(V)
for s in range(1, nstates + 1):
V[s - 1], P[s - 1] = max_action(transition_models, rewards, gamma, s, v, actions, terminal_ind)
delta = max(delta, np.abs(v[s - 1] - V[s - 1]))
return V, P
def policy_iter(policy, world, transition_models, rewards, gamma=0.9, theta=10 ** -4):
nstates = world.get_nstates()
terminal_ind = world.get_stateterminals()
V = np.zeros((nstates,))
a = ["N", "S", "E", "W"]
while True:
delta = 0
for s in range(nstates):
v = 0
for action, action_prob in enumerate(policy[s]):
action = a[action]
if s not in terminal_ind:
v += rewards[s - 1] + action_prob * gamma * np.dot(transition_models[action].loc[s, :].values, V)
else:
v = rewards[s - 1]
delta = max(delta, np.abs(v - V[s]))
V[s] = v
print (V[s])
if delta < theta:
break
return np.array(V)