摘要
本文讨论了如何利用路径规划算法对自主机器人进行路径规划和导航。自主机器人在环境中的路径规划是通过参考路径与机器人的当前位置进行比对,采用纯追踪算法(Pure Pursuit)进行路径跟踪,以确保机器人沿预定路线行驶。本文通过理论介绍、实验结果和Matlab代码示例,展示了路径规划在自主机器人导航中的实际应用。
理论
路径规划是指在已知环境或部分已知环境中,机器人从起始点移动到目标点的过程中,生成一条安全、可行的路径。常见的路径规划方法有以下几种:
1. 全局路径规划:基于机器人对环境的全局感知,利用算法如A*、Dijkstra等规划全局最优路径。
2. 局部路径规划:机器人利用实时传感器信息,在行进过程中动态调整路径,以避免障碍物。局部规划常使用的方法有动态窗口法(DWA)、人工势场法等。
3. 路径跟踪算法:机器人在确定了参考路径之后,通过特定的控制算法使自身沿着参考路径移动。本文中使用的纯追踪算法(Pure Pursuit)是一种典型的路径跟踪算法,其通过计算目标点和当前位姿之间的距离,来调节机器人的转向角度。
实验结果
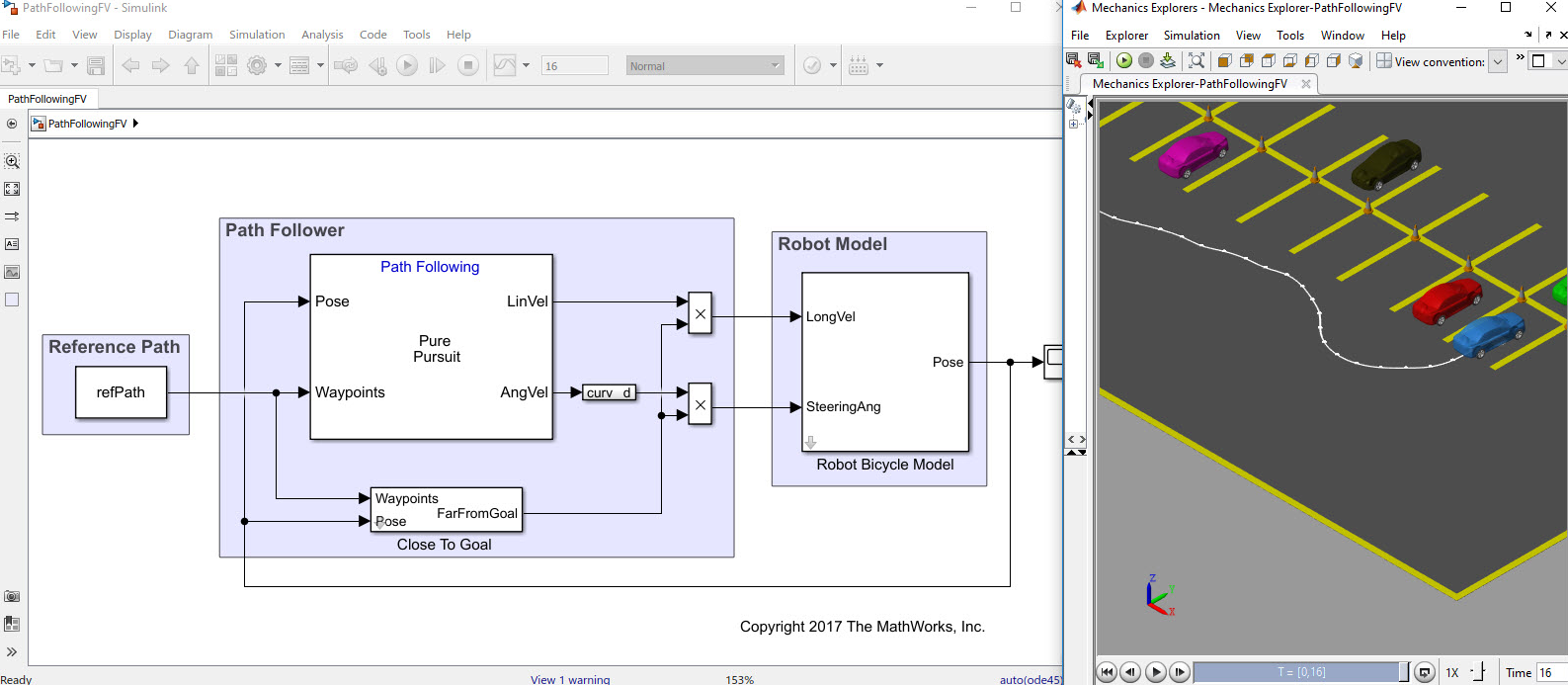
实验采用了Matlab/Simulink作为仿真平台,具体模型如图所示(图中的模型展示了路径规划与跟踪的流程)。机器人在停车场环境中通过规划路径绕过障碍物,并成功到达目标停车位。实验过程展示了以下关键步骤:
-
路径规划:基于停车场的环境地图,生成参考路径,并输入到机器人控制系统中。
-
路径跟踪:机器人实时获取自身位置和参考路径信息,利用纯追踪算法控制其转向角和速度,使其沿着预设路径行驶。
-
导航结果:实验显示机器人能够顺利绕过静态障碍物,并准确到达目标地点。
从结果来看,基于纯追踪的路径跟踪方法在该实验环境中表现出了较好的稳定性和路径跟踪精度。
部分代码
以下是用于纯跟踪算法的MATLAB代码示例:
% 定义参考路径
refPath = [0, 0;
1, 1;
2, 2;
3, 3;
4, 4]; % 示例参考路径
% 定义机器人的初始位置和速度
robotInitialLocation = refPath(1,:);
robotGoal = refPath(end,:);
initialOrientation = 0;
robotCurrentPose = [robotInitialLocation initialOrientation];
% 创建纯追踪控制器
controller = robotics.PurePursuit('Waypoints', refPath);
controller.DesiredLinearVelocity = 0.3; % 设置线速度
controller.MaxAngularVelocity = 2; % 设置最大角速度
controller.LookaheadDistance = 0.5; % 设置前瞻距离
% 设置仿真时长
sampleTime = 0.1; % 仿真步长
vizRate = rateControl(1/sampleTime);
% 仿真主循环
goalRadius = 0.1; % 设置目标半径
distanceToGoal = norm(robotInitialLocation - robotGoal);
while (distanceToGoal > goalRadius)
% 计算控制输入
[v, omega] = controller(robotCurrentPose);
% 更新机器人的位置和角度
vel = [v; 0; omega];
robotCurrentPose = robotCurrentPose + vel' * sampleTime;
% 更新距离
distanceToGoal = norm(robotCurrentPose(1:2) - robotGoal);
% 可视化更新
waitfor(vizRate);
end
disp('到达目标点');
参考文献
❝
Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. MIT Press.
LaValle, S. M. (2006). Planning Algorithms. Cambridge University Press.
Kelley, R. (2017). Path Following using Pure Pursuit Algorithm. MathWorks Documentation.
(文章内容仅供参考,具体效果以图片为准)