第124章 单总线简介
124.1 单总线概述
单总线是一种串行通信协议,由Dallas Semiconductor开发,特点是用一根信号线实现双向数据传输和时钟同步,节省IO口且结构简单。
它广泛应用于传感器、存储器等。
硬件包括信号线、上拉电阻、设备和处理器。
设备通过唯一64位地址识别,处理器控制通信。
124.2 单总线的通信步骤
单总线是主从结构,当主机呼叫从机时,从机才会应答,所以主机都必须严格遵循单总线的命令时序。如果命令时序不对,则器件不会响应。
单总线的通信步骤通常包括以下几个阶段。
1 初始化:通信开始之前,主设备会发送初始化信号来确保单总线上没有其他设备正在通信。
初始化信号是一个特定的序列,通常是将数据线拉低一段时间然后释放。
2 ROM 操作命令
3 功能命令
第125章 DS18B20 驱动框架编写
编写 DS18b20 驱动涉及以下几个关键知识点
1 字符设备驱动
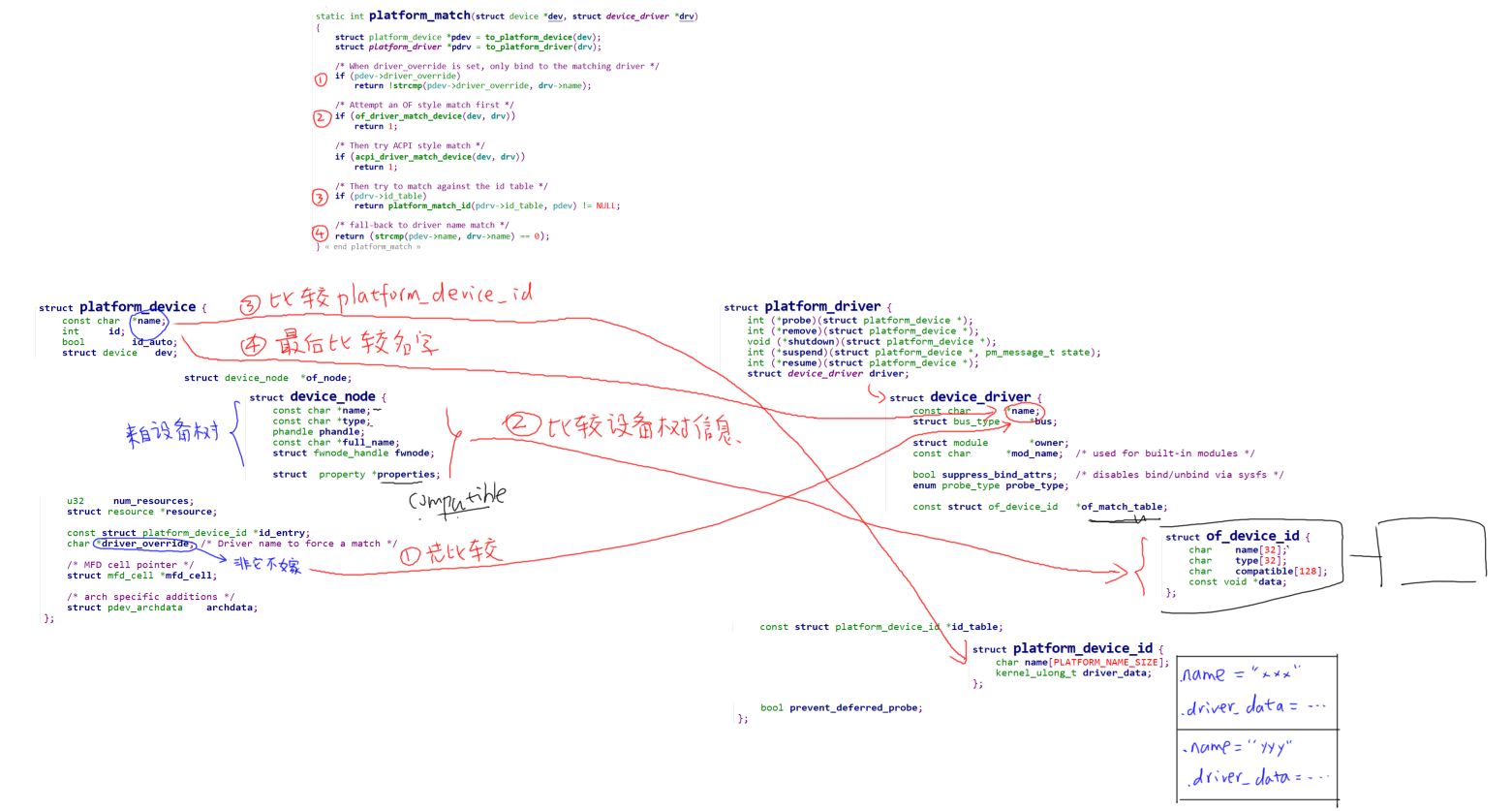
2 平台总线
3 设备树
4 解析设备树
5 gpio 子系统
6 pinctrl 子系统
7 单总线协议
125.1 驱动程序的编写
该代码是一个Linux内核模块,用于实现DS18B20温度传感器的平台驱动。
它包含了驱动的初始化、设备探测(probe)功能以及模块的加载和卸载功能。
// 设备数据结构
struct ds18b20_data {
dev_t dev_num; // 设备号
struct cdev ds18b20_cdev; // 字符设备结构
struct class *ds18b20_class; // 设备类
struct device *ds18b20_device; // 设备
};
static struct ds18b20_data *ds18b20; // 全局设备数据指针
// 设备文件操作函数
int ds18b20_open(struct inode *inode, struct file *file)
{
return 0;
}
ssize_t ds18b20_read(struct file *file, char __user *buf, size_t size, loff_t *offs)
{
// 此处应添加读取设备的实际逻辑
return 0; // 表示成功读取了0字节(应修改为实际读取的字节数)
}
int ds18b20_release(struct inode *inode, struct file *file)
{
return 0;
}
// 定义设备文件操作结构
static struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.owner = THIS_MODULE,
};
// 设备探测函数
int ds18b20_probe(struct platform_device *dev)
{
int ret;
printk(KERN_INFO "This is probe\n");
// 分配设备数据结构内存
ds18b20 = kzalloc(sizeof(*ds18b20), GFP_KERNEL);
if (!ds18b20) {
printk(KERN_ERR "kzalloc error\n");
ret = -ENOMEM;
goto error_0;
}
// 分配字符设备号
ret = alloc_chrdev_region(&ds18b20->dev_num, 0, 1, "myds18b20");
if (ret < 0) {
printk(KERN_ERR "alloc_chrdev_region error\n");
goto error_1;
}
// 初始化字符设备并添加到系统
cdev_init(&ds18b20->ds18b20_cdev, &ds18b20_fops);
ds18b20->ds18b20_cdev.owner = THIS_MODULE;
ret = cdev_add(&ds18b20->ds18b20_cdev, ds18b20->dev_num, 1);
if (ret < 0) {
printk(KERN_ERR "cdev_add error\n");
goto error_2;
}
// 创建设备类
ds18b20->ds18b20_class = class_create(THIS_MODULE, "sensors");
if (IS_ERR(ds18b20->ds18b20_class)) {
printk(KERN_ERR "class_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_class);
goto error_3;
}
// 创建设备
ds18b20->ds18b20_device = device_create(ds18b20->ds18b20_class, NULL, ds18b20->dev_num, NULL, "ds18b20");
if (IS_ERR(ds18b20->ds18b20_device)) {
printk(KERN_ERR "device_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_device);
goto error_4;
}
return 0;
error_4:
class_destroy(ds18b20->ds18b20_class);
error_3:
cdev_del(&ds18b20->ds18b20_cdev);
error_2:
unregister_chrdev_region(ds18b20->dev_num, 1);
error_1:
kfree(ds18b20);
error_0:
return ret;
}
// 定义设备匹配表
static const struct of_device_id ds18b20_match_table[] = {
{ .compatible = "ds18b20" },
{ },
};
MODULE_DEVICE_TABLE(of, ds18b20_match_table);
// 定义平台驱动
static struct platform_driver ds18b20_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "ds18b20",
.of_match_table = ds18b20_match_table,
},
.probe = ds18b20_probe,
};
// 模块初始化函数
static int __init ds18b20_init(void)
{
int ret;
ret = platform_driver_register(&ds18b20_driver);
if (ret < 0) {
printk(KERN_ERR "platform_driver_register error\n");
return -1;
}
return 0;
}
// 模块退出函数
static void __exit ds18b20_exit(void)
{
// 销毁设备
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
// 销毁设备类
class_destroy(ds18b20->ds18b20_class);
// 删除字符设备
cdev_del(&ds18b20->ds18b20_cdev);
// 注销字符设备号
unregister_chrdev_region(ds18b20->dev_num, 1);
// 释放设备数据结构内存
kfree(ds18b20);
// 注销平台驱动
platform_driver_unregister(&ds18b20_driver);
}
module_init(ds18b20_init);
module_exit(ds18b20_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("DS18B20 Temperature Sensor Driver");第126章 DS18B20 驱动设备树

126.1 DS18B20 驱动设备树配置
打开 Linux/linux_sdk/kernel/arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi 文件,在根目录下添加 ds18b20 节点,如下所示:
ds18b20_gpio: gpio0_b0 {
// 表示该设备节点兼容ds18b20温度传感器
compatible = "ds18b20";
// 指定ds18b20连接到的GPIO引脚信息
// <&gpio0> 表示使用gpio0控制器
// RK_PB0 表示引脚号为RK_PB0
// GPIO_ACTIVE_HIGH 表示信号高电平有效
ds18b20-gpios = <&gpio0 RK_PB0 GPIO_ACTIVE_HIGH>;
// 定义引脚控制名称,这里使用默认配置
pinctrl-names = "default";
// 指向具体的引脚控制配置节点
// <&ds18b20_gpio_ctrl> 引用名为ds18b20_gpio_ctrl的控制配置
pinctrl-0 = <&ds18b20_gpio_ctrl>;
};&pinctrl 节点添加如下节点,
ds18b20_gpio {
// 定义ds18b20的GPIO控制节点
ds18b20_gpio_ctrl: ds18b20-gpio-ctrl {
// 配置GPIO引脚信息
// 1: 引脚编号(可能表示在GPIO控制器中的索引)
// RK_PA0: 引脚地址(具体硬件上的引脚)
// RK_FUNC_GPIO: 引脚功能(设置为GPIO功能)
// &pcfg_pull_none: 引脚不上拉也不下拉
rockchip,pins = <1 RK_PA0 RK_FUNC_GPIO &pcfg_pull_none>;
};
};修改完成后,重新编译并烧写内核镜像。
内核镜像烧写完毕,输入以下命令
cd /proc/device-tree/gpio0_b0/
ls
cat compatible
然后 Insmod装载 ds18b20的驱动,


至此,DS18b20 设备树配置和字符设备驱动框架已经完成了。
第127章 DS18B20 驱动复位时序编写
127.1 DS18B20 驱动获取 GPIO 编写
该代码实现了一个完整的Linux内核模块,用于支持DS18B20温度传感器。
它包含了必要的头文件、数据结构、文件操作、设备探测、初始化、退出函数等。
在探测函数中,代码进行了内存分配、字符设备注册、设备类和设备的创建、GPIO配置等操作。
在退出函数中,代码则进行了相应的清理和注销操作。
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/gpio/consumer.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
// DS18B20 数据结构
struct ds18b20_data {
dev_t dev_num; // 设备号
struct cdev ds18b20_cdev; // 字符设备结构体
struct class *ds18b20_class; // 设备类
struct device *ds18b20_device;// 设备
struct gpio_desc *ds18b20_gpio;// GPIO 描述符
};
static struct ds18b20_data *ds18b20; // DS18B20 数据结构指针
// 文件操作结构体函数
static int ds18b20_open(struct inode *inode, struct file *file)
{
return 0;
}
static ssize_t ds18b20_read(struct file *file, char __user *buf, size_t size, loff_t *offs)
{
return 0;
}
static int ds18b20_release(struct inode *inode, struct file *file)
{
return 0;
}
static struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.owner = THIS_MODULE,
};
// 设备探测函数
static int ds18b20_probe(struct platform_device *dev)
{
int ret;
printk("This is probe\n");
// 分配内存给 ds18b20_data 结构体
ds18b20 = kzalloc(sizeof(*ds18b20), GFP_KERNEL);
if (!ds18b20) {
printk("kzalloc error\n");
ret = -ENOMEM;
goto error_0;
}
// 分配字符设备号
ret = alloc_chrdev_region(&ds18b20->dev_num, 0, 1, "myds18b20");
if (ret < 0) {
printk("alloc_chrdev_region error\n");
ret = -EAGAIN;
goto error_1;
}
// 初始化字符设备
cdev_init(&ds18b20->ds18b20_cdev, &ds18b20_fops);
ds18b20->ds18b20_cdev.owner = THIS_MODULE;
cdev_add(&ds18b20->ds18b20_cdev, ds18b20->dev_num, 1);
// 创建设备类
ds18b20->ds18b20_class = class_create(THIS_MODULE, "sensors");
if (IS_ERR(ds18b20->ds18b20_class)) {
printk("class_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_class);
goto error_2;
}
// 创建设备
ds18b20->ds18b20_device = device_create(ds18b20->ds18b20_class, NULL, ds18b20->dev_num, NULL, "ds18b20");
if (IS_ERR(ds18b20->ds18b20_device)) {
printk("device_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_device);
goto error_3;
}
// 获取 GPIO 描述符
ds18b20->ds18b20_gpio = gpiod_get_optional(&dev->dev, "ds18b20", 0);
if (!ds18b20->ds18b20_gpio) {
ret = -EBUSY;
goto error_4;
}
// 设置 GPIO 方向为输出
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
return 0;
error_4:
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
error_3:
class_destroy(ds18b20->ds18b20_class);
error_2:
cdev_del(&ds18b20->ds18b20_cdev);
unregister_chrdev_region(ds18b20->dev_num, 1);
error_1:
kfree(ds18b20);
error_0:
return ret;
}
// 设备匹配表
static const struct of_device_id ds18b20_match_table[] = {
{ .compatible = "ds18b20" },
{},
};
// 平台驱动结构体
static struct platform_driver ds18b20_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "ds18b20",
.of_match_table = ds18b20_match_table,
},
.probe = ds18b20_probe,
};
// 模块初始化函数
static int __init ds18b20_init(void)
{
int ret;
ret = platform_driver_register(&ds18b20_driver);
if (ret < 0) {
printk("platform_driver_register error\n");
return -1;
}
return 0;
}
// 模块退出函数
static void __exit ds18b20_exit(void)
{
// 释放 GPIO 描述符
gpiod_put(ds18b20->ds18b20_gpio);
// 销毁设备
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
// 销毁设备类
class_destroy(ds18b20->ds18b20_class);
// 删除字符设备
cdev_del(&ds18b20->ds18b20_cdev);
// 注销字符设备号
unregister_chrdev_region(ds18b20->dev_num, 1);
// 释放 ds18b20_data 内存
kfree(ds18b20);
// 注销平台驱动
platform_driver_unregister(&ds18b20_driver);
}
module_init(ds18b20_init);
module_exit(ds18b20_exit);
MODULE_LICENSE("GPL");127.2 DS18b20 驱动复位时序编写
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/gpio/consumer.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
struct ds18b20_data {
dev_t dev_num; // 设备号
struct cdev ds18b20_cdev; // 字符设备结构体
struct class *ds18b20_class; // 设备类
struct device *ds18b20_device; // 设备
struct gpio_desc *ds18b20_gpio; // GPIO 描述符
};
static struct ds18b20_data *ds18b20; // DS18B20 数据结构指针
static int ds18b20_open(struct inode *inode, struct file *file)
{
return 0;
}
static ssize_t ds18b20_read(struct file *file, char __user *buf, size_t size, loff_t *offs)
{
return 0;
}
static int ds18b20_release(struct inode *inode, struct file *file)
{
return 0;
}
static struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.owner = THIS_MODULE,
};
// 设备探测函数
static int ds18b20_probe(struct platform_device *dev)
{
int ret;
printk("This is probe\n");
// 分配内存给 ds18b20_data 结构体
ds18b20 = kzalloc(sizeof(*ds18b20), GFP_KERNEL);
if (!ds18b20) {
printk("kzalloc error\n");
ret = -ENOMEM;
goto error_0;
}
// 分配字符设备号
ret = alloc_chrdev_region(&ds18b20->dev_num, 0, 1, "myds18b20");
if (ret < 0) {
printk("alloc_chrdev_region error\n");
ret = -EAGAIN;
goto error_1;
}
// 初始化字符设备
cdev_init(&ds18b20->ds18b20_cdev, &ds18b20_fops);
ds18b20->ds18b20_cdev.owner = THIS_MODULE;
cdev_add(&ds18b20->ds18b20_cdev, ds18b20->dev_num, 1);
// 创建设备类
ds18b20->ds18b20_class = class_create(THIS_MODULE, "sensors");
if (IS_ERR(ds18b20->ds18b20_class)) {
printk("class_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_class);
goto error_2;
}
// 创建设备
ds18b20->ds18b20_device = device_create(ds18b20->ds18b20_class, NULL, ds18b20->dev_num, NULL, "ds18b20");
if (IS_ERR(ds18b20->ds18b20_device)) {
printk("device_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_device);
goto error_3;
}
// 获取 GPIO 描述符
ds18b20->ds18b20_gpio = gpiod_get_optional(&dev->dev, "ds18b20", 0);
if (!ds18b20->ds18b20_gpio) {
ret = -EBUSY;
goto error_4;
}
// 设置 GPIO 方向为输出
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
return 0;
error_4:
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
error_3:
class_destroy(ds18b20->ds18b20_class);
error_2:
cdev_del(&ds18b20->ds18b20_cdev);
unregister_chrdev_region(ds18b20->dev_num, 1);
error_1:
kfree(ds18b20);
error_0:
return ret;
}
// 设备匹配表
static const struct of_device_id ds18b20_match_table[] = {
{ .compatible = "ds18b20" },
{},
};
static struct platform_driver ds18b20_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "ds18b20",
.of_match_table = ds18b20_match_table,
},
.probe = ds18b20_probe,
};
static int __init ds18b20_init(void)
{
int ret;
ret = platform_driver_register(&ds18b20_driver);
if (ret < 0) {
printk("platform_driver_register error\n");
return -1;
}
return 0;
}
static void __exit ds18b20_exit(void)
{
// 释放 GPIO 描述符
gpiod_put(ds18b20->ds18b20_gpio);
// 销毁设备
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
// 销毁设备类
class_destroy(ds18b20->ds18b20_class);
cdev_del(&ds18b20->ds18b20_cdev);
// 注销字符设备号
unregister_chrdev_region(ds18b20->dev_num, 1);
// 释放 ds18b20_data 内存
kfree(ds18b20);
// 注销平台驱动
platform_driver_unregister(&ds18b20_driver);
}
module_init(ds18b20_init);
module_exit(ds18b20_exit);
MODULE_LICENSE("GPL");
硬件连接好之后,安装逻辑分析仪的上位机软件,安装完成之后,打开上位机软件,然后设置参数,



设置完毕之后,如下图所示:

上位机上捕捉到时序如下图所示:

将捕捉到的复位时序和下图的时序图对比分析,可以看出驱动复位时序是没问题的。
 至此,DS18b20 驱动复位时序编写完成。
至此,DS18b20 驱动复位时序编写完成。
第128章 DS18B20 驱动写时序编写
驱动入口函数调用了 ds18b20的写字节函数,
写字节函数调用写位函数,
写位函数调用 gpiod接口,
gpiod接口基于 gpio描述符。
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/gpio/consumer.h>
#include <linux/uaccess.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/delay.h> // for udelay
struct ds18b20_data {
dev_t dev_num;
struct cdev ds18b20_cdev;
struct class *ds18b20_class;
struct device *ds18b20_device;
struct gpio_desc *ds18b20_gpio;
};
static struct ds18b20_data *ds18b20;
// 复位 DS18B20
static void ds18b20_reset(void) {
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
gpiod_set_value(ds18b20->ds18b20_gpio, 0);
udelay(700);
gpiod_set_value(ds18b20->ds18b20_gpio, 1);
gpiod_direction_input(ds18b20->ds18b20_gpio);
while (gpiod_get_value(ds18b20->ds18b20_gpio));
while (!gpiod_get_value(ds18b20->ds18b20_gpio));
udelay(480);
}
// 向 DS18B20 写入单个位
static void ds18b20_writebit(unsigned char bit) {
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
gpiod_set_value(ds18b20->ds18b20_gpio, 0);
if (bit) {
udelay(10);
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
}
udelay(65);
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
udelay(2);
}
// 向 DS18B20 写入一个字节
static void ds18b20_writebyte(int data) {
int i;
for (i = 0; i < 8; i++) {
ds18b20_writebit(data & 0x01);
data >>= 1;
}
}
// 字符设备操作函数
static int ds18b20_open(struct inode *inode, struct file *file) {
return 0;
}
static ssize_t ds18b20_read(struct file *file, char __user *buf, size_t size, loff_t *offs) {
return 0;
}
static int ds18b20_release(struct inode *inode, struct file *file) {
return 0;
}
static struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.owner = THIS_MODULE,
};
// 设备探测函数
static int ds18b20_probe(struct platform_device *dev) {
int ret;
printk("This is probe\n");
ds18b20 = kzalloc(sizeof(*ds18b20), GFP_KERNEL);
if (!ds18b20) {
printk("kzalloc error\n");
ret = -ENOMEM;
goto error_0;
}
ret = alloc_chrdev_region(&ds18b20->dev_num, 0, 1, "myds18b20");
if (ret < 0) {
printk("alloc_chrdev_region error\n");
ret = -EAGAIN;
goto error_1;
}
cdev_init(&ds18b20->ds18b20_cdev, &ds18b20_fops);
ds18b20->ds18b20_cdev.owner = THIS_MODULE;
cdev_add(&ds18b20->ds18b20_cdev, ds18b20->dev_num, 1);
ds18b20->ds18b20_class = class_create(THIS_MODULE, "sensors");
if (IS_ERR(ds18b20->ds18b20_class)) {
printk("class_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_class);
goto error_2;
}
ds18b20->ds18b20_device = device_create(ds18b20->ds18b20_class, NULL, ds18b20->dev_num, NULL, "ds18b20");
if (IS_ERR(ds18b20->ds18b20_device)) {
printk("device_create error\n");
ret = PTR_ERR(ds18b20->ds18b20_device);
goto error_3;
}
ds18b20->ds18b20_gpio = gpiod_get_optional(&dev->dev, "ds18b20", 0);
if (!ds18b20->ds18b20_gpio) {
ret = -EBUSY;
goto error_4;
}
gpiod_direction_output(ds18b20->ds18b20_gpio, 1);
return 0;
error_4:
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
error_3:
class_destroy(ds18b20->ds18b20_class);
error_2:
cdev_del(&ds18b20->ds18b20_cdev);
unregister_chrdev_region(ds18b20->dev_num, 1);
error_1:
kfree(ds18b20);
error_0:
return ret;
}
static const struct of_device_id ds18b20_match_table[] = {
{ .compatible = "ds18b20" },
{ },
};
static struct platform_driver ds18b20_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "ds18b20",
.of_match_table = ds18b20_match_table,
},
.probe = ds18b20_probe,
};
static int __init ds18b20_init(void) {
int ret;
ret = platform_driver_register(&ds18b20_driver);
if (ret < 0) {
printk("platform_driver_register error\n");
return -1;
}
ds18b20_reset();
ds18b20_writebyte(0xcc); // 写入 0Xcc 字符(跳过 ROM 命令)
return 0;
}
static void __exit ds18b20_exit(void) {
gpiod_put(ds18b20->ds18b20_gpio);
device_destroy(ds18b20->ds18b20_class, ds18b20->dev_num);
class_destroy(ds1第129章 DS18B20 驱动读时序编写
读时序参考STM32和写时序的套路。
第130章 DS18B20读温度
字符设备的 file_operations的读操作给了 ds18b20的读取代码。
// 定义DS18B20数据结构体
struct ds18b20_data {
// ... 其他成员变量(省略)
struct gpio_desc *ds18b20_gpio; // GPIO描述符指针
};
// 声明DS18B20数据结构体指针
struct ds18b20_data *ds18b20;
// 复位DS18B20传感器
void ds18b20_reset(void) {
// ... 复位操作(省略)
}
// 向DS18B20写入单个位
void ds18b20_writebit(unsigned char bit) {
// ... 写位操作(省略)
}
// 向DS18B20写入一个字节
void ds18b20_writebyte(int data) {
// ... 写字节操作(使用ds18b20_writebit,省略)
}
// 从DS18B20读取单个位
unsigned char ds18b20_readbit(void) {
// ... 读位操作(省略)
return bit;
}
// 从DS18B20读取一个字节
int ds18b20_readbyte(void) {
// ... 读字节操作(使用ds18b20_readbit,省略)
return data;
}
// 从DS18B20读取温度值
int ds18b20_readtemp(void) {
int temp_l, temp_h, temp;
ds18b20_reset(); // 复位传感器
ds18b20_writebyte(0xCC); // 发送跳过ROM命令
ds18b20_writebyte(0x44); // 发送启动温度转换命令
mdelay(750); // 延时等待温度转换完成
ds18b20_reset(); // 再次复位传感器
ds18b20_writebyte(0xCC); // 发送跳过ROM命令
ds18b20_writebyte(0xBE); // 发送读取温度值命令
temp_l = ds18b20_readbyte(); // 读取温度低位字节
temp_h = ds18b20_readbyte(); // 读取温度高位字节
temp = (temp_h << 8) | temp_l; // 组合成完整的温度值
return temp;
}
// 字符设备读取函数
ssize_t ds18b20_read(struct file *file, char __user *buf, size_t size, loff_t *offs) {
int ds18b20_temp;
ds18b20_temp = ds18b20_readtemp(); // 读取温度值
if (copy_to_user(buf, &ds18b20_temp, sizeof(ds18b20_temp))) {
return -1; // 复制失败,返回错误
}
return 0; // 成功读取并复制温度值
}
struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.unlocked_ioctl = ds18b20_ioctl,
.owner = THIS_MODULE, };
// 初始化字符设备
cdev_init(&ds18b20->ds18b20_cdev, &ds18b20_fops);
ds18b20->ds18b20_cdev.owner = THIS_MODULE;
cdev_add(&ds18b20->ds18b20_cdev, ds18b20->dev_num, 1);
//初始化设备类
...
//初始化设备
...
// ... 其他代码(如模块初始化、退出等,省略)/*在应用程序中*/
// 设置分辨率
ioctl(fd, SET_RESOLUTION, args);
while (1) {
// 读取数据
read(fd, &data, sizeof(data));
// 处理并打印温度信息
ds18b20_get_temp(data);第131章 DS18B20设置分辨率
/*读取分辨率*/
int read_resolution(void) {
int ret;
// 复位传感器
ds18b20_reset();
// 发送指令字节 0xCC,跳过 ROM 操作,直接与单个设备通信
ds18b20_writebyte(0xCC);
// 发送指令字节 0xBE,读取当前设备的配置寄存器
ds18b20_writebyte(0xBE);
// 读取 4 个字节的数据,但实际上只有最后一个字节是分辨率信息
ds18b20_readbyte();
ds18b20_readbyte();
ds18b20_readbyte();
ds18b20_readbyte();
// 读取最后一个字节,即分辨率信息
ret = ds18b20_readbyte();
// 返回分辨率值
return ret;
}
/**
* DS18B20 温度传感器的 ioctl 函数
* @param file 文件指针
* @param cmd 命令
* @param args 参数
* @return 返回执行结果,成功返回 0,失败返回 -1
*/
long ds18b20_ioctl(struct file *file, unsigned int cmd, unsigned long args) {
int resolution;
if (cmd == SET_RESOLUTION) { // 判断命令是否为设置分辨率
if (args >= SET_RESOLUTION_9 && args <= SET_RESOLUTION_12) { // 判断参数是否在有效的分辨率范围内
set_resolution(args); // 调用设置分辨率的函数
return 0; // 返回成功
}
}
else if (cmd == READ_RESOLUTION) {
// 读取分辨率
resolution = read_resolution();
// 将分辨率的值复制给用户空间的 args
if (copy_to_user((int *)args, &resolution, sizeof(resolution))) {
// 复制失败,返回-1 表示失败
return -1;
}
}
// 如果不匹配 SET_RESOLUTION 或者 args 不在有效范围内,不执行任何操作
return -1; // 返回失败
}
struct file_operations ds18b20_fops = {
.open = ds18b20_open,
.read = ds18b20_read,
.release = ds18b20_release,
.unlocked_ioctl = ds18b20_ioctl,
.owner = THIS_MODULE, };/*在应用程序中*/
// 设置分辨率
ioctl(fd, SET_RESOLUTION, args);
// 读取分辨率
ioctl(fd, READ_RESOLUTION, &resolution);
ds18b20_get_resolution(resolution);
while (1) {
// 读取数据
read(fd, &data, sizeof(data));
// 处理并打印温度信息
ds18b20_get_temp(data);