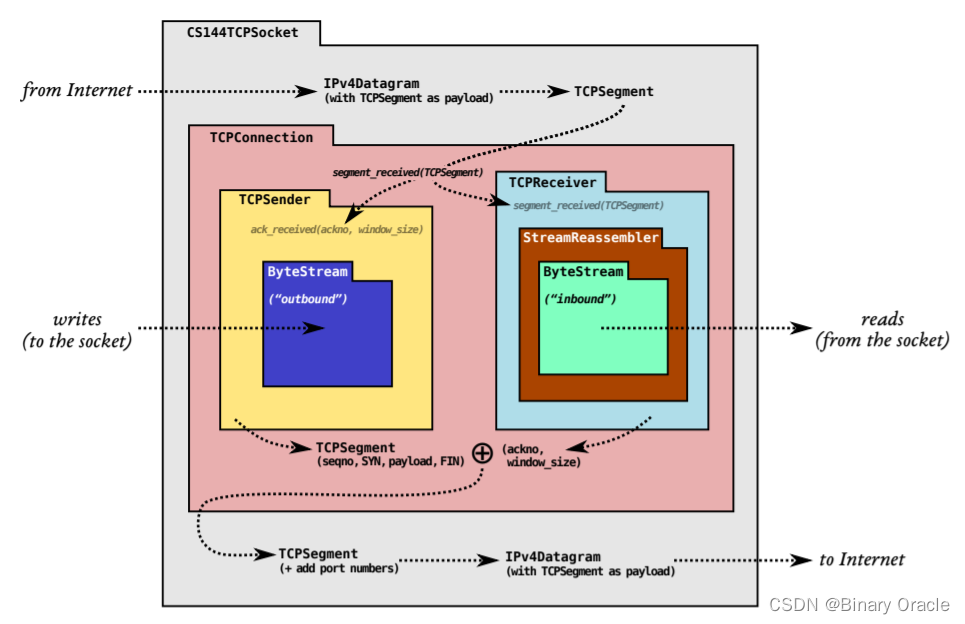
【STM32 HAL库】MPU6050 DMP库移植 与 自检失败的处理
- 本文参考
- 移植步骤
- 文件配置
- 代码修改
- inv_mpu.c
- inv_mpu.h
- inv_mpu_dmp_motion_driver.c
- 使用
- 自检失败怎么处理
- ret = -1
- 改正
- DEBUG过程
- ret = -9
- 改正
- DEBUG过程
本文参考
B站
CSDN
移植步骤
文件配置
新建一个 dmp 文件夹
并将 8 个官方的驱动文件复制到这个文件夹中

将该dmp文件夹复制到工程文件夹中

新建Groups组,并添加这8个驱动文件

添加编译路径

代码修改
inv_mpu.c
第 39 行到第 161 行删掉
从#if defined EMPL_TARGET_STM32F4到#endif
然后在删除代码的原位置添加以下代码
#define MPU6050
#include "main.h"
extern I2C_HandleTypeDef hi2c1;
#define i2c_write(dev_addr,reg_addr,data_size,p_data) \
HAL_I2C_Mem_Write(&hi2c1,dev_addr,reg_addr,I2C_MEMADD_SIZE_8BIT,p_data,data_size,0x100)
#define i2c_read(dev_addr,reg_addr,data_size,p_data) \
HAL_I2C_Mem_Read(&hi2c1,dev_addr,reg_addr,I2C_MEMADD_SIZE_8BIT,p_data,data_size,0x100)
#define delay_ms HAL_Delay
#define get_ms(p) do{*p = HAL_GetTick();}while(0)
#define log_i(...) do {} while (0)
#define log_e(...) do {} while (0)
/* labs is already defined by TI's toolchain. */
/* fabs is for doubles. fabsf is for floats. */
#define fabs fabsf
#define min(a,b) ((a<b)?a:b)
找到这段代码,删掉

修改.addr值为0xd0
注意这个addr大概在400行左右,如果你修改成480行的那个addr值,则后续自检会不通过!!!

inv_mpu.h
删掉 31 行到 44 行的这段代码

并在删去的位置添加下面这段代码
struct int_param_s {
void *arg;
};
inv_mpu_dmp_motion_driver.c
删掉第 27 到 77 行的代码

添加下面代码
#include "main.h"
extern I2C_HandleTypeDef hi2c1;
#define delay_ms HAL_Delay
#define get_ms(p) do{*p = HAL_GetTick();}while(0)
#define log_i(...) do {} while (0)
#define log_e(...) do {} while (0)
修改

使用
引用头文件
#include "MPU6050.h"
在main.c的初始化部分 添加MPU6050 DMP库初始化代码
int ret=0;
do{
ret=MPU6050_DMP_init();
//printf输出ret值,判断初始化是否成功
printf("ret=%d\n",ret);
}while(ret);

定义全局变量
float pitch,yaw,roll;
函数使用
void loop(void){
MPU6050_DMP_Get_Date(&pitch,&roll,&yaw);
printf("pitch=%f yaw=%f roll=%f\n",pitch,roll,yaw);
}
自检失败怎么处理
ret = -1
改正
将inv_mpu.c 400行左右的.addr的值修改为0xd0
不是480行的那个!!!

DEBUG过程
我们可以发现ret为 MPU6050_DMP_init(); 的返回值
进入该函数实现
可以看到在该函数中返回值为宏定义
进入宏定义
确定 ret = -1 对应 ERROR_MPU_INIT

也即ret = mpu_init(&int_param);中的mpu初始化函数报错,返回值不为0。

再看下该函数实现
发现有多个return -1的出口,无法判断是哪里出去

改写该函数,将所有的return -1的出口处添加error_code的标志位,判断到底从哪个出口出去

打印的error_code为1
说明设备复位错误

我们排查i2c_write(st.hw->addr, st.reg->pwr_mgmt_1, 1, data)函数
发现是st.hw->addr该参数错误

错误原因:在移植DMP库的时候,修改inv_mpu.c时,修改成了MPU6500的.addr值,而非MPU6050的
480行左右的.addr是定义MPU6500时的设备地址,也即MPU6500的设备地址,并非400行左右的那个MPU6050的.addr值
注意,该段代码为灰色,说明被编译器忽视了(因为MPU6500没有被define)
修改:将400行左右的那个MPU6050的设备地址.addr的值修改为0xd0
ret = -9
改正
将inv_mpu.c中int mpu_run_self_test(long *gyro, long *accel) 的2730行左右的这段代码注释掉

DEBUG过程
ret=-9对应MPU6050自检函数错误

进入run_self_test();看该函数为何报错

在result后将其值赋给error_code并打印,发现result值为0x7
我们看下为什么result不为0x3
进入该陀螺仪、加速度计自检函数

该函数内部

函数作用:
用result的第0位、第1位、第2位分别存储陀螺仪、加速度计、磁力计的自检结果。
若自检通过,则对应位置1(位运算,按位或)
若陀螺仪、加速度计、磁力计均自检通过,则result = 0111,也即0x7
但我们没有接磁力计,所以最高位应该为0,也即result = 0011,也即0x3(这也是我们想要的
我们看下,为什么最高位会被置1,也即为什么磁力计会自检通过

我们看下这段代码,如果定义了磁力计,则巴拉巴拉。#else result |= 0x04;
说明,即使没有定义磁力计(没有外接磁力计),自检也通过,最高位置1(result=0x7),这显然不对,我们注释掉这行代码
改正: