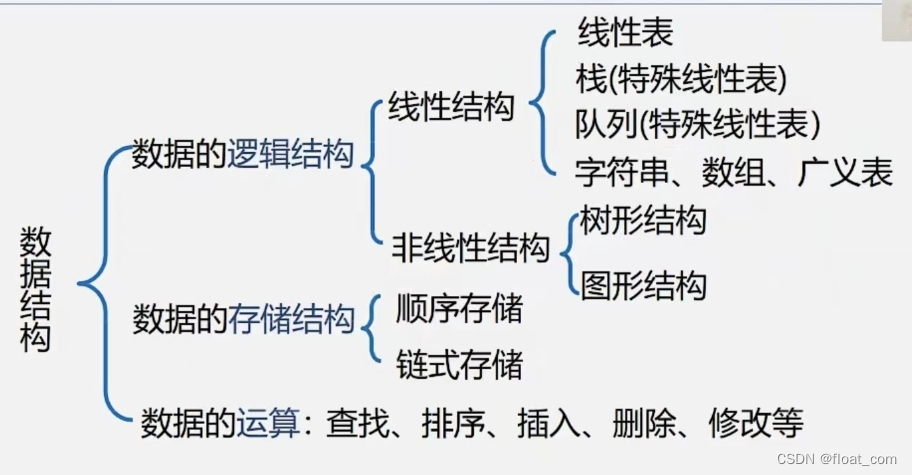
1.知识回顾
2.查找算法相关问题汇总
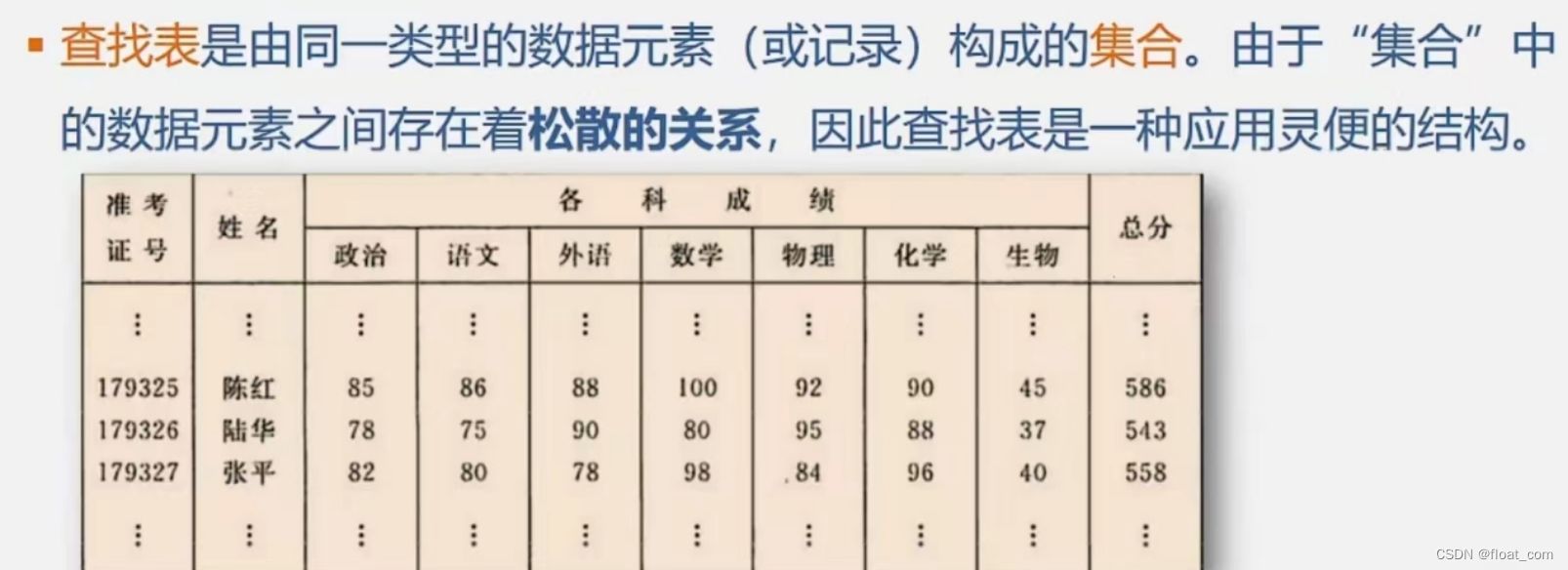
2.1在哪里查找
查找表
2.2通过什么进行查找
关键字的对应
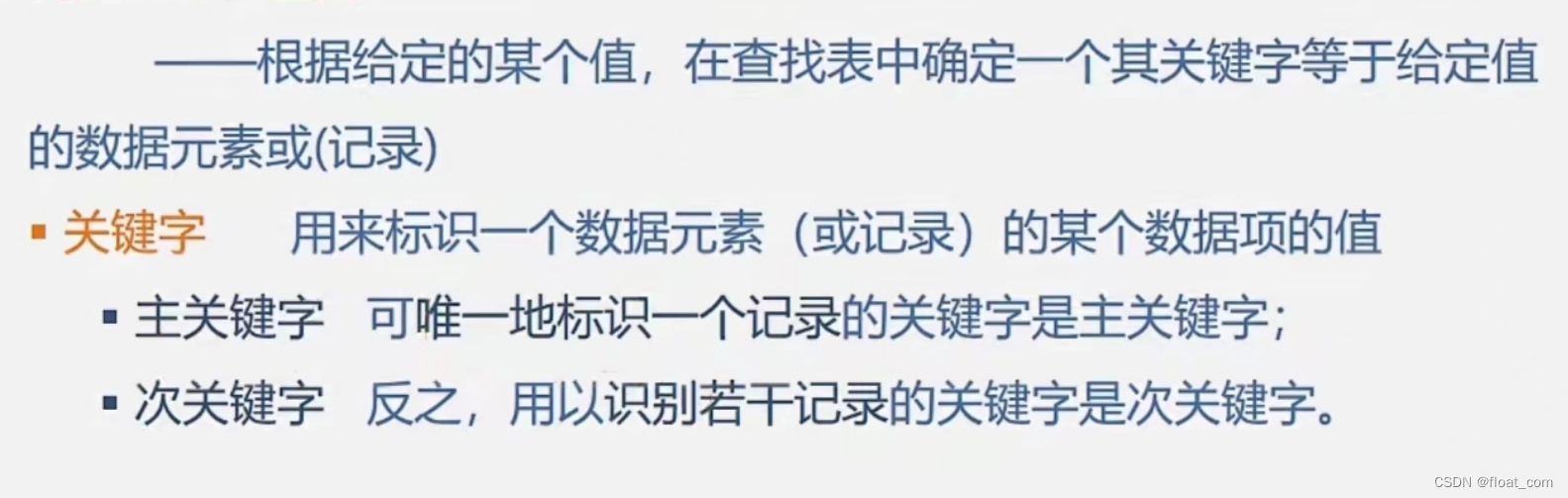
主关键字:比如我们可以通过一个学号来唯一确定一名学生
这里的学号就是一种主关键字。
次关键字:而通过一个名字李华,我们可能会确定不止一名学生
这里的名字李华就是一种次关键字。
实际上我们只需要明白
主关键字唯一确定一个元素
次关键字可能确定多个元素
即可
2.3查找是否成功
2.4查找的目的
2.5查表找的分类
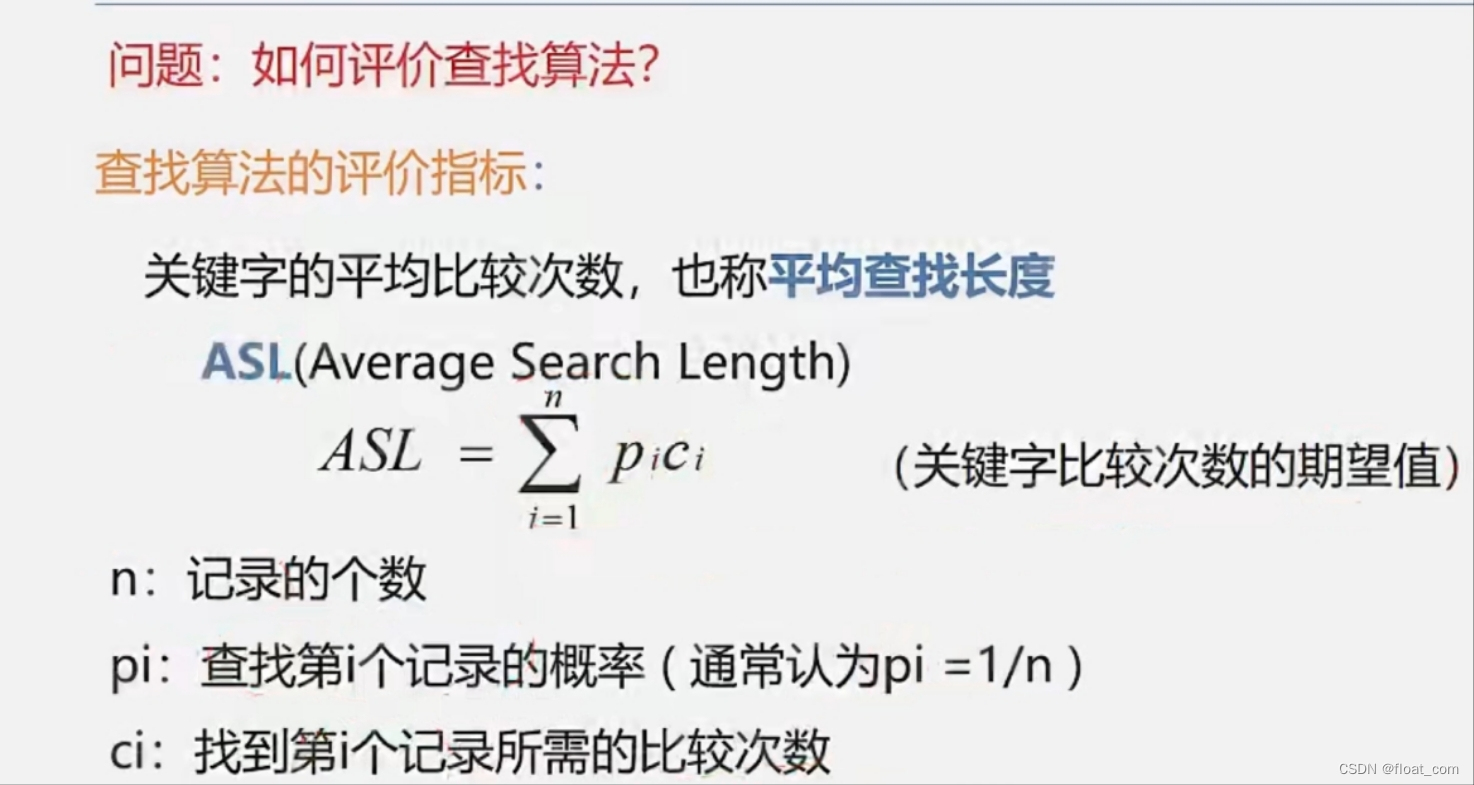
2.6评价查找算法–平均查找长度
2.7查找过程中的研究目标
3.线性表的查找
3.1分类:
顺序查找(线性查找),折半查找(二分或对分查找),分块查找
3.2线性表的顺序查找
实际上就是暴力遍历,从表头遍历到表尾,直至查找到对应元素
当然我们也可以从表尾遍历到表头直至查找到对应元素
3.2.1顺序查找的应用范围:
- 顺序表或线性链表表示的静态查找表
- 表内元素之间可以无序
3.2.2顺序表的表示
//定义动态顺序表初始默认最大容量
#define InitSize 12
typedef int KeyType ;
//KeyType:是顺序表中每个关键字的类型
//1.顺序表的表示:
//1.1数据元素类型定义
typedef struct
{
KeyType key;//关键字域
//除了关键字域以外,还可以定义其他域
}ElemType;
//ElemType:是顺序表中的数据类型
//1.2顺序表的结构类型定义
typedef struct
{
ElemType * elem;//顺序表的基地址(动态数组存储)
int length;//表长
int maxsize;//顺序表的最大容量
}SSTable;
//SSTable:用来定义一个顺序表
3.2.3 顺序表的顺序查找算法:
- 1.一般的顺序查找算法:

三种基本形式的代码
//在顺序表L中,查找值为key的数据元素,若成功返回其位置信息,否则返回0;
//注意这里的位置信息就是顺序表数组下标:从1开始(因为我们是从下标1开始存储第一个有效数据的)
//1.不带监视哨的顺序查找法
//思路:从后往前比较,直到找到key或比较到最后一个元素
//时间复杂度:O(n)
//空间复杂度:O(1)
//方式1:
int Search1(SSTable L, KeyType key)
{
for (int i = L.length; i >= 1; i--)
{
if (L.elem[i].key == key)
{
return i;
}
}
return 0;
}
//其他方式:(主要包含了边界条件的判断)
//方式2:
int Search2(SSTable L, KeyType key)
{
int i;
for (i = L.length; L.elem[i].key!=key; i--)
{
if (i <= 0)
{
break;
}
}
if (i > 0)
{
return i;
}
else
{
return 0;
}
}
//方式3:
int Search3(SSTable L, KeyType key)
{
int i;
for (i = L.length; L.elem[i].key != key && i > 0; i--);
//这里实际上就是将两个判断条件合并了 一定要注意这里的for循环没有循环体,需要加引号。
if (i > 0)
{
return i;
}
else
{
return 0;
}
}
- 改进过后的顺序查找(添加了监视哨):

如下图:

代码如下:
//2.改进后带监视哨的顺序查找法
//思路:把待查关键字key存入表头(哨兵,监视哨)从后往前比较,直到找到key或比较到最后一个元素,直接返回i的值
//可以减少查找过程中每一步都要检测是否查找完毕,加快了查找速度
int Search4(SSTable L, KeyType key)
{
//[1]初始化监视哨
L.elem[0].key = key;
//[2]顺序查找操作:
int i;
for ( i = L.length; L.elem[i].key != key; i--);
//[3]返回最后的i值:
//如果能找到key,那么i就是key的位置,否则i就是0(即监视哨位置的下标)
return i;
}
3.2.4顺序查找法操作一览:
#include<stdio.h>
#include<stdlib.h>
#include<stdbool.h>
//定义动态顺序表初始默认最大容量
#define InitSize 12
typedef int KeyType ;//KeyType:是顺序表中每个关键字的类型
//1.顺序表的表示:
//1.1数据元素类型定义
typedef struct
{
KeyType key;//关键字域
//除了关键字域以外,还可以定义其他域
}ElemType;
//ElemType:是顺序表中的数据类型
//1.2顺序表的结构类型定义
typedef struct
{
ElemType * elem;//顺序表的基地址(动态数组存储)
int length;//表长
int maxsize;//顺序表的最大容量
}SSTable;
//SSTable:用来定义一个顺序表
//2.顺序表的一些基本操作:(与之前所学完全一致)
//这里仅涉及初始化,与输出(重点是查找算法)
//2.1顺序表的初始化(动态顺序表)
bool InitSeqList(SSTable* L)
{
//[0]防止程序潜在异常
if (L == NULL)
{
return false;
}
//[1]初始化动态数组的内存空间
//注意:因为动态顺序表定义时只定义了一个指针,没有给指针分配空间,这是一个极其危险的野指针
//所以我们需要为它分配一片空间,而且这片空间的大小应该由初始化时定义的InitSize来决定
L->elem = (ElemType*)malloc(sizeof(ElemType) * InitSize);
//sizeof(ElemType)*InitSize):本程序中的ElemType是结构体类型(包含了int 类型的 关键字域),所以这里分配了InitSize个结构体类型的空间
//[2]检查内存分配是否成功
if (L->elem == NULL)
{
printf("顺序表内存分配失败!");
return false;
}
//[3]初始化表长
L->length = 0;
//[4]初始化动态顺序表的最大容量
//注意这里的最大容量是初始值(即前面定义过的InitSize),后续有需求的时候可以进行扩容
L->maxsize = InitSize;
return true;
}
//6.动态顺序表的元素插入
//可以类比静态顺序表的插入操作
bool SeqListInsert(SSTable* L, int i, KeyType e)//在顺序表的第i个【元素位序】位置插入一个新元素e
{
//[1]确保顺序表指针和数据指针不为空
if (L == NULL || L->elem == NULL)
{
printf("顺序表指针为空或数据指针为空!\n");
return false;
}
//[2]判断插入操作是否合法
//<1>插入位置不合法
// (比如一个顺序表长度为8,而插入位置是【元素位序】第0位【即数组下标】[-1],插入位置是【元素位序】第10位【即数组下标】[9]等)
//注意:数组末的下一个元素的位置是可以插入的(即在顺序表的末尾添加一个元素)此时【元素位序】第Length+1位
//但是数组末的下下个元素及以后位置不能插入
if (i<1 || i>L->length + 1)
{
printf("插入位置不合法!\n");
// return false;
}
//<2>顺序表已经存满了,不能再插入
if (L->length >= L->maxsize)//最大容量为可变值maxsize
{
printf("顺序表已满!\n");
return false;
}
//[3]将新元素插入到正确的位置------区分数组下标[i-1]和元素位序[i]的排列(元素位序比数组下标大1)
//<1>将【元素位序】第i位以及第i位之后的所有元素后移一位
for (int j = L->length; j >= i; j--)
{
L->elem[j] = L->elem[j - 1];
}//现在的j就是数组下标
//<2>在【元素位序】第i位【即数组下标】第i-1位插入新元素e
L->elem[i-1].key = e;
//[4]顺序表长度+1
L->length++;
//[5]返回true,插入成功
return true;
}
//2.2动态顺序表的输出
bool SeqListPrint(SSTable L)
{
//[1]判断是否为空表
if (L.length == 0)
{
printf("该顺序表是空表!\n");
return false;
}
//[2]输出顺序表的元素
printf("SeqList:\n");
for (int i = 0; i < L.length; i++)
{
printf("%d-->", L.elem[i].key);
}
printf("end\n");
return true;
}
//顺序表的查找算法:(从最后一个元素开始比较)
//在顺序表L中,查找值为key的数据元素,若成功返回其位置信息,否则返回0;
//注意这里的位置信息就是顺序表数组下标:从1开始(因为我们是从下标1开始存储第一个有效数据的)
//1.不带监视哨的顺序查找法
//思路:从后往前比较,直到找到key或比较到最后一个元素
//时间复杂度:O(n)
//空间复杂度:O(1)
//方式1:
int Search1(SSTable L, KeyType key)
{
for (int i = L.length; i >= 1; i--)
{
if (L.elem[i].key == key)
{
return i;
}
}
return 0;
}
//其他方式:(主要包含了边界条件的判断)
//方式2:
int Search2(SSTable L, KeyType key)
{
int i;
for (i = L.length; L.elem[i].key!=key; i--)
{
if (i <= 0)
{
break;
}
}
if (i > 0)
{
return i;
}
else
{
return 0;
}
}
//方式3:
int Search3(SSTable L, KeyType key)
{
int i;
for (i = L.length; L.elem[i].key != key && i > 0; i--);
//这里实际上就是将两个判断条件合并了 一定要注意这里的for循环没有循环体,需要加引号。
if (i > 0)
{
return i;
}
else
{
return 0;
}
}
//2.改进后带监视哨的顺序查找法
//思路:把待查关键字key存入表头(哨兵,监视哨)从后往前比较,直到找到key或比较到最后一个元素,直接返回i的值
//可以减少查找过程中每一步都要检测是否查找完毕,加快了查找速度
int Search4(SSTable L, KeyType key)
{
//[1]初始化监视哨
L.elem[0].key = key;
//[2]顺序查找操作:
int i;
for ( i = L.length; L.elem[i].key != key; i--);
//[3]返回最后的i值:
//如果能找到key,那么i就是key的位置,否则i就是0(即监视哨位置的下标)
return i;
}
//注意:我们将有效数据从数组中下标为1的位置开始存储,即元素位序为2的位置开始存储
int main()
{
SSTable L;
InitSeqList(&L);
//这里直接初始化11个数据,不考虑动态扩容
SeqListInsert(&L, 1, -99);
//第一个数据,即插入到数组下标为0的位置,是垃圾值-99
SeqListInsert(&L, 2, 5);
SeqListInsert(&L, 3, 7);
SeqListInsert(&L, 4, 19);
SeqListInsert(&L, 5, 21);
SeqListInsert(&L, 6, 13);
SeqListInsert(&L, 7, 56);
SeqListInsert(&L, 8, 64);
SeqListInsert(&L, 9, 92);
SeqListInsert(&L, 10, 88);
SeqListInsert(&L, 11, 80);
SeqListInsert(&L, 12, 75);
SeqListPrint(L);
printf("13查找结果:%d\n", Search4(L, 13));
printf("60查找结果:%d\n", Search4(L, 60));
return 0;
}

3.2.5顺序查找算法的分析:
- 效率分析:
如下图,共11个元素,查找失败,比较12次

则有结论:比较次数与key位置有关
查找第i个元素,需要比较n-i+1次
查找失败,需比较n+1次


- 效率优化方法:

3.3线性表的二分查找
本篇前提:
- 每个元素按非递减有序排列
- 有效数据从下标为1开始存储
3.3.3二分查找的非递归算法

算法核心思路:
- (1)初始化上下界(注意这里从下标1开始存储有效数据)
- (2)循环查找key值
- (2.1)更新中点下标
- 若中点元素等于key,返回中点下标
- 若中点元素大于key,证明待查找元素在前半区间,缩小上界
- 若中点元素小于key,证明待查找元素在后半区间,缩小下界
- 若没有找到返回0
//[0]非递归算法只需要传入 顺序表 和 待查找数据key 这两个参数
int Search1(SSTable L,KeyType key)
{
//[1]初始化上下界
int low = 1, high = L.length;
//[2]循环查找key值
while (low<=high)//注意终止条件为low>high
{
//[2.1]更新中点下标
KeyType mid = (low + high) / 2;
//[2.2]若中点元素等于key,返回中点下标
if (L.elem[mid].key == key)
{
return mid;
}
//[2.3]若中点元素大于key,证明待查找元素在前半区间,缩小上界
else if(L.elem[mid].key > key)
{
high = mid - 1;
}
//[2.4]若中点元素小于key,证明待查找元素在后半区间,缩小下界
else
{
low = mid + 1;
}
}
//没有找到返回0
return 0;
}
3.3.4二分查找的递归算法
核心思路与非递归完全一致,只不过传参时需要传入low,high(递归的前提条件)
算法核心思路:
- (1)先写递归结束条件
- (2)更新中点下标
- (3)递归寻找对应元素
- 若中点元素等于key,返回中点下标
- 若中点元素大于key,递归查找前半区间
- 若中点元素等于key,递归查找后半区间
//2.顺序表的二分查找算法(递归)
//有效数据从下标1开始存储
//[0]注意传入 顺序表 和 待查找数据key 起始元素下标 最后一个元素下标 这四个参数(后两个参数是为了递归做准备)
int Search2(SSTable L, KeyType key,int low,int high)
{
//[1]递归结束条件
if (low > high)
{
return 0;
}
//[2]更新中点下标
KeyType mid = (low + high) / 2;
//递归寻找对应元素
//[2.1]若中点元素等于key,返回中点下标
if (L.elem[mid].key == key)
{
return mid;
}
//[2.2]若中点元素大于key,递归查找前半区间
else if (L.elem[mid].key > key)
{
return Search2(L, key, low, mid - 1);
}
//[2.3]若中点元素等于key,递归查找后半区间
else
{
return Search2(L, key, mid + 1, high);
}
}
3.3.5二分查找的实例分析与相关总结
3.3.5.1实例分析:
以查找21成功为实例:


中点值大于key,缩短上半区间

中间值小于key,缩短下半区间

找到key值

3.3.5.2相关总结如下:
以非递减有序排列为实例:



3.3.6 两种算法操作一览:
#include<stdio.h>
#include<stdlib.h>
#include<stdbool.h>
//定义动态顺序表初始默认最大容量
#define InitSize 13
typedef int KeyType;
//KeyType:是顺序表中每个关键字的类型
//1.顺序表的表示:
//1.1数据元素类型定义
typedef struct
{
KeyType key;//关键字域
//除了关键字域以外,还可以定义其他域
}ElemType;
//ElemType:是顺序表中的数据类型
//1.2顺序表的结构类型定义
typedef struct
{
ElemType* elem;//顺序表的基地址(动态数组存储)
int length;//表长
int maxsize;//顺序表的最大容量
}SSTable;
//SSTable:用来定义一个顺序表
//2.顺序表的一些基本操作:(与之前所学完全一致)
//这里仅涉及初始化,与输出(重点是查找算法)
//2.1顺序表的初始化(动态顺序表)
bool InitSeqList(SSTable* L)
{
//[0]防止程序潜在异常
if (L == NULL)
{
return false;
}
//[1]初始化动态数组的内存空间
//注意:因为动态顺序表定义时只定义了一个指针,没有给指针分配空间,这是一个极其危险的野指针
//所以我们需要为它分配一片空间,而且这片空间的大小应该由初始化时定义的InitSize来决定
L->elem = (ElemType*)malloc(sizeof(ElemType) * InitSize);
//sizeof(ElemType)*InitSize):本程序中的ElemType是结构体类型(包含了int 类型的 关键字域),所以这里分配了InitSize个结构体类型的空间
//[2]检查内存分配是否成功
if (L->elem == NULL)
{
printf("顺序表内存分配失败!");
return false;
}
//[3]初始化表长
L->length = 0;
//[4]初始化动态顺序表的最大容量
//注意这里的最大容量是初始值(即前面定义过的InitSize),后续有需求的时候可以进行扩容
L->maxsize = InitSize;
return true;
}
//6.动态顺序表的元素插入
//可以类比静态顺序表的插入操作
bool SeqListInsert(SSTable* L, int i, KeyType e)//在顺序表的第i个【元素位序】位置插入一个新元素e
{
//[1]确保顺序表指针和数据指针不为空
if (L == NULL || L->elem == NULL)
{
printf("顺序表指针为空或数据指针为空!\n");
return false;
}
//[2]判断插入操作是否合法
//<1>插入位置不合法
// (比如一个顺序表长度为8,而插入位置是【元素位序】第0位【即数组下标】[-1],插入位置是【元素位序】第10位【即数组下标】[9]等)
//注意:数组末的下一个元素的位置是可以插入的(即在顺序表的末尾添加一个元素)此时【元素位序】第Length+1位
//但是数组末的下下个元素及以后位置不能插入
if (i<1 || i>L->length + 1)
{
printf("插入位置不合法!\n");
// return false;
}
//<2>顺序表已经存满了,不能再插入
if (L->length >= L->maxsize)//最大容量为可变值maxsize
{
printf("顺序表已满!\n");
return false;
}
//[3]将新元素插入到正确的位置------区分数组下标[i-1]和元素位序[i]的排列(元素位序比数组下标大1)
//<1>将【元素位序】第i位以及第i位之后的所有元素后移一位
for (int j = L->length; j >= i; j--)
{
L->elem[j] = L->elem[j - 1];
}//现在的j就是数组下标
//<2>在【元素位序】第i位【即数组下标】第i-1位插入新元素e
L->elem[i - 1].key = e;
//[4]顺序表长度+1
L->length++;
//[5]返回true,插入成功
return true;
}
//2.2动态顺序表的输出
bool SeqListPrint(SSTable L)
{
//[1]判断是否为空表
if (L.length == 0)
{
printf("该顺序表是空表!\n");
return false;
}
//[2]输出顺序表的元素
printf("SeqList:\n");
for (int i = 0; i < L.length; i++)
{
printf("%d-->", L.elem[i].key);
}
printf("end\n");
return true;
}
//顺序表的查找算法:
//在顺序表L中,查找值为key的数据元素,若成功返回其位置信息,否则返回0;
//注意这里的位置信息就是顺序表数组下标:从1开始(因为我们是从下标1开始存储第一个有效数据的)
//1.顺序表的二分查找算法(非递归)
//有效数据从下标1开始存储
//[0]非递归算法只需要传入 顺序表 和 待查找数据key 这两个参数
int Search1(SSTable L,KeyType key)
{
//[1]初始化上下界
int low = 1, high = L.length;
//[2]循环查找key值
while (low<=high)//注意终止条件为low>high
{
//[2.1]更新中点下标
KeyType mid = (low + high) / 2;
//[2.2]若中点元素等于key,返回中点下标
if (L.elem[mid].key == key)
{
return mid;
}
//[2.3]若中点元素大于key,证明待查找元素在前半区间,缩小上界
else if(L.elem[mid].key > key)
{
high = mid - 1;
}
//[2.4]若中点元素小于key,证明待查找元素在后半区间,缩小下界
else
{
low = mid + 1;
}
}
//没有找到返回0
return 0;
}
//2.顺序表的二分查找算法(递归)
//有效数据从下标1开始存储
//[0]注意传入 顺序表 和 待查找数据key 起始元素下标 最后一个元素下标 这四个参数(后两个参数是为了递归做准备)
int Search2(SSTable L, KeyType key,int low,int high)
{
//[1]递归结束条件
if (low > high)
{
return 0;
}
//[2]更新中点下标
KeyType mid = (low + high) / 2;
//[2.1]若中点元素等于key,返回中点下标
if (L.elem[mid].key == key)
{
return mid;
}
//[2.2]若中点元素大于key,递归查找前半区间
else if (L.elem[mid].key > key)
{
return Search2(L, key, low, mid - 1);
}
//[2.3]若中点元素等于key,递归查找后半区间
else
{
return Search2(L, key, mid + 1, high);
}
}
//注意:我们将有效数据从数组中下标为1的位置开始存储,即元素位序为2的位置开始存储
//同时需要注意二分查找的前提是:顺序表已排序(非递减有序排列 或者非递增有序排列)
int main()
{
SSTable L;
InitSeqList(&L);
//这里我们直接构造1个非递减有序排列的顺序表
//有效数据从顺序表下标为1开始存储
SeqListInsert(&L, 1, -99);
//第一个数据,即插入到数组下标为0的位置,是垃圾值-99
SeqListInsert(&L, 2, 5);
SeqListInsert(&L, 3, 13);
SeqListInsert(&L, 4, 19);
SeqListInsert(&L, 5, 21);
SeqListInsert(&L, 6, 37);
SeqListInsert(&L, 7, 56);
SeqListInsert(&L, 8, 64);
SeqListInsert(&L, 9, 75);
SeqListInsert(&L, 10, 80);
SeqListInsert(&L, 11, 88);
SeqListInsert(&L, 12, 92);
SeqListPrint(L);
printf("21查找结果:%d\n", Search1(L, 21));
printf("60查找结果:%d\n", Search2(L, 60,1,L.length));
return 0;
}

3.3.7二分查找算法的分析:
3.3.7.1使用二叉判定树进行分析:
以这11个元素为实例:
我们将每次查找的元素下标放在二叉树中的对应位置
(下半区间的元素放在左子树中,上半区间的元素放在右子树中)
则分析结果如图所示:

得到结论:二分查找的时间复杂度为O(logn)
3.3.7.2二分查找的平均查找长度:(成功时)



3.4线性表的分块查找(了解)
分块查找-----为索引查找的一种方法,广泛应用于数据库中:
分块查找的特征:
- 块内无序
- 块间有序

查找效率与优缺点分析如下: