目录
yolov11介绍——实时端到端物体检测
概述
主要特征
支持的任务和模式
性能指标
总结
strongsort介绍
指标图
系统定位
效果展示
训练与预测
UI设计
界面其他功能展示
完整代码实现+UI界面
yolov11介绍——实时端到端物体检测
概述
YOLO11 是 Ultralytics YOLO 系列实时物体检测器的最新版本,重新定义了在尖端准确度、速度和效率方面的可能性。在前几代 YOLO 版本的显著进步基础上,YOLO11 在架构和训练方法上引入了重大改进,使其成为广泛计算机视觉任务的灵活选择。

主要特征
增强特征提取:YOLO11 使用了改进的主干和颈部架构,这增强了特征提取能力,以实现更精确的物体检测和复杂任务的执行。
优化以提高效率和速度:YOLO11 引入了精简的架构设计和优化的训练管道,提供更快的处理速度,并保持了准确性与性能之间的最佳平衡。
参数更少,精度更高:随着模型设计的改进,YOLO11m 在 COCO 数据集上的平均精度(mAP)更高,同时比 YOLOv8m 使用的参数减少了 22%,使其在保持高精度的同时计算效率更高。
适应跨环境:YOLO11 可以无缝部署在各种环境中,包括边缘设备、云平台以及支持 NVIDIA GPU 的系统,确保最大程度的灵活性。
支持的任务范围广泛:无论是对象检测、实例分割、图像分类、姿态估计,还是定向对象检测(OBB),YOLO11 都旨在应对多样化的计算机视觉挑战
支持的任务和模式
YOLO11 在 YOLOv8 引入的多功能模型系列基础上构建,提供了针对各种计算机视觉任务增强的支持:

这张表格提供了 YOLO11 模型变体的概览,展示了它们在特定任务中的适用性以及与推理、验证、训练和导出等操作模式的兼容性。这种灵活性使 YOLO11 适用于计算机视觉的广泛应用,从实时检测到复杂的分割任务。
性能指标

总结
Ultralytics YOLO11 相比于之前的版本,关键的改进有哪些?
增强特征提取:YOLO11 使用了改进的主干和颈部架构,增强了特征提取能力,从而实现更精确的物体检测。
优化效率与速度:精简的建筑设计和优化的训练管道在保持准确性和性能平衡的同时,提供更快的处理速度。
参数更少,精度更高:YOLO11m 在 COCO 数据集上使用比 YOLOv8m 少 22% 的参数实现了更高的平均精度(mAP),使其在保持高精度的同时计算效率更高。
适应不同环境:YOLO11 可以部署在各种环境中,包括边缘设备、云平台以及支持 NVIDIA GPU 的系统。
支持的任务范围广泛:YOLO11 支持多种计算机视觉任务,包括对象检测、实例分割、图像分类、姿态估计和定向对象检测(OBB)。
strongsort介绍
三个要点
✔️ 改进了MOT任务中的早期深度模型DeepSORT,实现了SOTA!
✔️ 提出了两种计算成本较低的后处理方法AFLink和GSI,以进一步提高准确度!
✔️ AFLink和GSI提高了几个模型的准确性,不仅仅是所提出的方法!
性能指标图
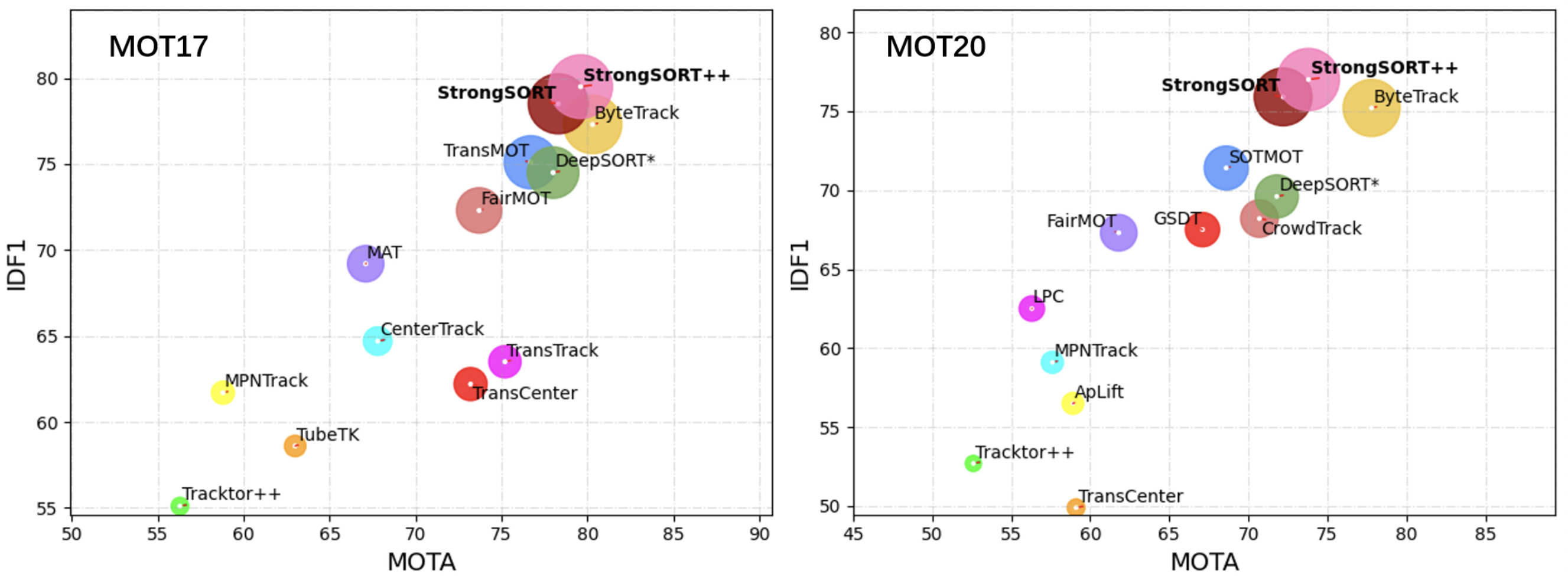
首先,我附上了MOT17和MOT20的准确性比较,这表明了StrongSORT的优越性。现在,VGGNet,一个著名的特征提取器,最近作为RepVGG,一个更强大的版本回归。以类似的标题回归的是StrongSORT:让DeepSORT再次伟大,其中DeepSORT是一个早期的基于深度学习的物体追踪模型,而StrongSORT是对这个早期模型的改进,采用最新的技术实现SOTAStrongSORT是一个通过用最新技术在初始模型上进行改进而实现SOTA的模型。让我们先快速看一下这些改进。
DeepSORT
+BoT:改进的外观特征提取器
+EMA:带有惯性项的特征更新
+NSA:用于非线性运动的卡尔曼滤波器
+MC:包括运动信息的成本矩阵
+ECC:摄像机运动更正
+woC:不采用级联算法
=StrongSORT
+AF链接:仅使用运动信息的全局链接
=StrongSORT+
+GSI内插:通过高斯过程对检测误差进行内插
=StrongSORT++
与其说从根本上改变了结构,不如说是改进了跟踪所需的特征提取、运动信息和成本矩阵的处理。StrongSORT++将AFLink(离线处理)和GSI插值(后处理)应用于改进的StrongSORT,是一个更加精确的模型。我个人认为关键在于此,所以如果你能读到最后,我将很高兴。让我们快速了解一下StrongSORT。
系统定位
本节首先解释了这一方法的系统定位。想了解该方法细节的人可以跳过这一节。深度学习跟踪方法始于DeepSORT。后来,出现了FairMOT和ByteTrack等新方法,并超越了DeepSORT的准确性。在提出新的追踪方法的过程中,出现了两种追踪方法。DeepSORT属于SDE,其检测器是单独准备的。它属于SDE。然而,在本文中,DeepSORT的低准确性并不是因为方法不好,而只是因为它的年龄,其动机是,如果根据此后提出的最新元素技术进行改进,就可以使它变得足够准确。我们有动力去改进它。
改进DeepSORT的原因还有很多。首先,JDE方法的缺点是不容易训练:JDE同时训练检测和跟踪等不同任务的参数,所以模型容易发生冲突,从而限制了准确性。它还需要一个可以同时从检测到跟踪进行训练的数据集,这限制了训练的范围。相比之下,使用SDE,检测和跟踪模型可以被单独优化。最近,诸如ByteTrack这样的模型也被提出来,用于仅基于运动信息的高速跟踪,而没有任何外观信息,但这种模型指出了当目标的运动不简单时无法跟踪的问题。
因此,基于在基于DeepSORT的SDE方法中使用外观特征进行追踪是最佳的动机,提出了StrongSORT。
效果展示
训练与预测


UI设计
将本次的实验使用pyqt打包,方便体验


界面其他功能展示
其他功能演示参考yolov5+deepsort文章
两万字深入浅出yolov5+deepsort实现目标跟踪,含完整代码, yolov,卡尔曼滤波估计,ReID目标重识别,匈牙利匹配KM算法匹配_yolov5 deepsort-CSDN博客
完整代码实现+UI界面
视频,笔记和代码,以及注释都已经上传网盘,放在主页置顶文章