近些年自动驾驶领域一定绕不开端到端, 伴随着各大车企纷纷转向拥抱端到端, 传统PnC的处境似乎愈发尴尬了起来. 但是端到端真的如水中月镜中花般美好吗?
不可否认深度学习给诸多领域带来了天翻地覆的变化, 但是自动驾驶直接关系到交通安全. 自动驾驶系统的输出, 必须具备足够的可解释性和安全性. 目前端到端的黑盒特性, 决定了它还无法完全取代PnC.
现阶段各家的端到端方案, 仍然需要一套传统PnC方案为模型兜底. 其实在自动驾驶等强调安全性的领域, 深度学习还完全无法替代传统控制方案.
小白说邀请 知乎大佬:@一以知行入驻, 开展控制理论进阶小班课程!
- 知行老师, 清华大学机械工程硕士, 曾在大疆, 华为担任资深控制算法工程师, 具有强大的理论背景和丰富的工程落地经验.
同时, 我们将在小白说官网免费更新小班课对应的课件! https://www.helloxiaobai.cn/article/act
进阶课有啥不一样?
与面向纯小白做理论科普的动手学基础系列, 不同的是: 进阶课老师会详细工作中真正用到的方案, 以及方案背后更深的理论知识.
老师会结合理论知识和行业多年实践得到的工程经验, 把真正的干货融入到课程中. 具体大纲如下:
我能从小班课中学到什么?
我们会严格控制每一期小班课的学员人数, 超过40个人便不再招收学员. 小班课的内容都是经过行业大厂实践检验的算法, 学员很难从公开资料获取. 小班课内容可以直接写进简历中, 让面试官眼前一亮.
让你对控制算法有着更高层级的理解,从初级工程师迈向资深工程师.

原价1699, 早鸟价1499!
小班课如何开展?
我们会在VIP学员群定期直播小班课程, 课程中学员可以有问题随时与老师沟通提问. 本课程适用于 已经有基本控制理论基础的同学, 纯新人可以关注小白说的动手学控制理论免费课程!
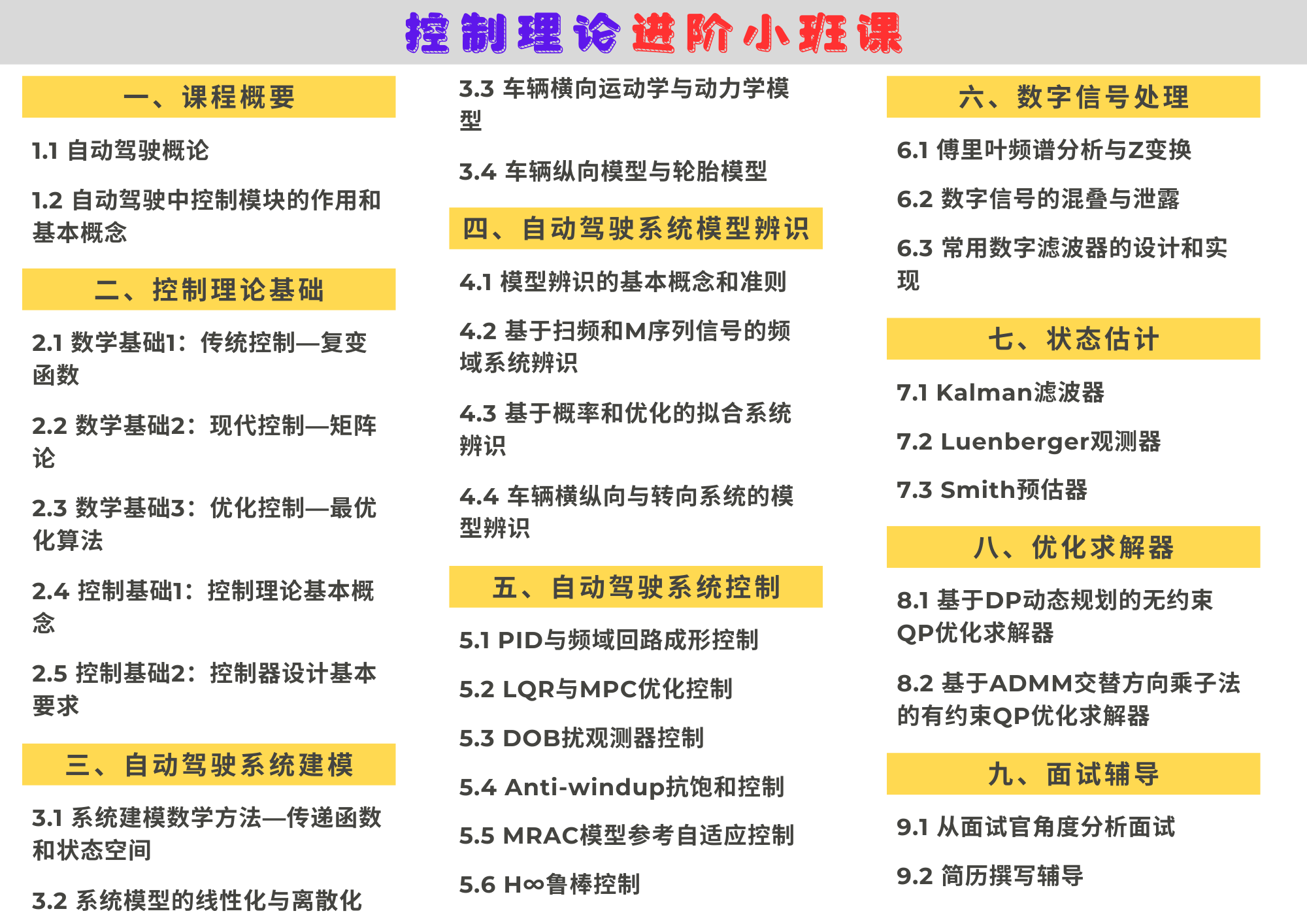
进阶小班课程详细内容介绍如下:
一、课程概要
- 1.1 自动驾驶概论
- 介绍自动驾驶的发展历史与前沿动态。
- 1.2 自动驾驶中控制模块的作用和基本概念
- 介绍自动驾驶系统的常见架构与控制模块的地位作用,明确自动驾驶中控制系统的基本特性和要求。
二、控制理论基础
- 2.1 数学基础1:传统控制—复变函数
- 介绍传统频域控制中使用的复变函数基础,包括拉普拉斯变换、时频域分析方法、信号卷积等。
- 2.2 数学基础2:现代控制—矩阵论
- 介绍现代控制中使用的矩阵论基础,包括矩阵特征值、相似变换、正交变换等。
- 2.3 数学基础3:优化控制—最优化算法
- 介绍常用的最优化算法,包括无约束优化的梯度法、牛顿法、共轭梯度法等;有约束优化的拉格朗日法、KKT条件、交替方向乘子法、投影法等;智能优化的遗传算法、粒子群算法等。
- 2.4 控制基础1:控制理论基本概念
- 介绍控制理论的基础概念,包括稳定性、鲁棒性、带宽、闭环传递函数、开环传递函数、灵敏度曲线等。
- 2.5 控制基础2:控制器设计基本要求
- 介绍控制器设计的基本要求、不同类型系统的控制器评价标准等。
三、自动驾驶系统建模
- 3.1 系统建模数学方法—传递函数和状态空间
- 介绍被控系统建模常用的传递函数和状态空间形式,包括传递函数的构建方法、零极点特性、常见传递函数环节、频域响应分析以及伯德图等;状态空间的基本概念、能观能控特性以及与传递函数的相互转换等。
- 3.2 系统模型的线性化与离散化
- 介绍非线性系统的常用线性化方法,包括泰勒展开线性化、精确线性化等;介绍连续系统和离散系统的转换方法,包括欧拉差分法、双线性变换法和零阶保持器等。
- 3.3 车辆横向运动学与动力学模型
- 介绍常用的全局坐标系和局部道路坐标系下的车辆横向运动学与动力学模型。
- 3.4 车辆纵向模型与轮胎模型
- 介绍常用车辆纵向系统模型,包括风阻路阻模型、车辆纵向一阶二阶响应模型、路面附着系数和滑移率等内容;介绍常用的车辆轮胎模型。
四、自动驾驶系统模型辨识
- 4.1 模型辨识的基本概念和准则
- 介绍系统模型辨识的概念策略和工程经验。
- 4.2 基于扫频和M序列信号的频域系统辨识
- 介绍频域模型辨识的一般流程。
- 4.3 基于概率和优化的拟合系统辨识
- 介绍基于优化的常用系统辨识工具和方法。
- 4.4 车辆横纵向与转向系统的模型辨识
- 具体针对车辆的横向、纵向和转向系统进行模型辨识。
五、自动驾驶系统控制
- 5.1 PID与频域回路成形控制
- 介绍PID控制的基本概念,利用回路成形工具定量快速调整PID控制器最优参数;介绍自动驾驶中PID在纵向控制的应用。
- 5.2 LQR与MPC优化控制
- 介绍LQR和MPC控制的基本思想和设计方法,明确优化控制的调参准则;介绍自动驾驶中LQR和MPC在横向控制的应用。
- 5.3 DOB扰观测器控制
- 针对实际控制系统中的存在的模型不确定性和外部扰动,利用DOB干扰观测器进行扰动估计与补偿,提高自动驾驶系统的抗扰能力。
- 5.4 Anti-windup抗饱和控制
- 针对实际控制系统中可能存在的控制指令限幅所导致的闭环失稳问题,利用Anti-windup抗饱和控制进行补偿,减少自动驾驶控制系统的振荡问题。
- 5.5 MRAC模型参考自适应控制
- 针对实际控制系统被控模型之间存在差异的问题,利用MRAC模型参考控制进行自适应调节,提升系统的控制性能。
- 5.6 H∞鲁棒控制
- 介绍基于混合灵敏度优化的H∞鲁棒控制,提升自动驾驶控制系统的鲁棒性。
六、数字信号处理
- 6.1 傅里叶频谱分析与Z变换
- 介绍数字信号处理中的傅里叶变换和离散域的Z变换概念。
- 6.2 数字信号的混叠与泄露
- 介绍数字信号工程应用中的奈奎斯特频率、信号混叠和泄露问题。
- 6.3 常用数字滤波器的设计和实现
- 介绍常用数字滤波器的设计,包括巴特沃斯、切比雪夫I型/II型、椭圆滤波器等;介绍低通、高通、带通、带阻滤波器的设计方法和评估。
七、状态估计
- 7.1 Kalman滤波器
- 介绍Kalman滤波器的思想、设计方法与调参经验;介绍针对非线性系统的扩展Kalman滤波器和无迹Kalman滤波器等。
- 7.2 Luenberger观测器
- 介绍基于现代控制理论的Luenberger观测器和极点配置方法。
- 7.3 Smith预估器
- 针对控制系统的纯时延问题,介绍Smith预估器的基本思想和设计方法,改善时延导致的控制系统失稳问题。
八、优化求解器
- 8.1 基于DP动态规划的无约束QP优化求解器
- 8.2 基于ADMM交替方向乘子法的有约束QP优化求解器
- 针对MPC等优化控制问题,设计高效鲁棒的QP问题求解器,介绍求解器开发的方法原理和工程经验。
九、面试辅导
- 9.1 从面试官角度分析面试
- 9.2 简历撰写辅导
适用人群
- 车辆工程、自动化、运动控制等相关专业研究方向的本科/硕士/博士;
- 自动驾驶规划控制相关算法工程师;
- 想要转行自动驾驶控制算法的小伙伴;
咨询小助理了解更多!