1.什么是编码器
编码器(encoder)是将信号或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。
2.分类
按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式(光编)和绝对式(磁编)两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
1.光电编码器(增量式编码器):

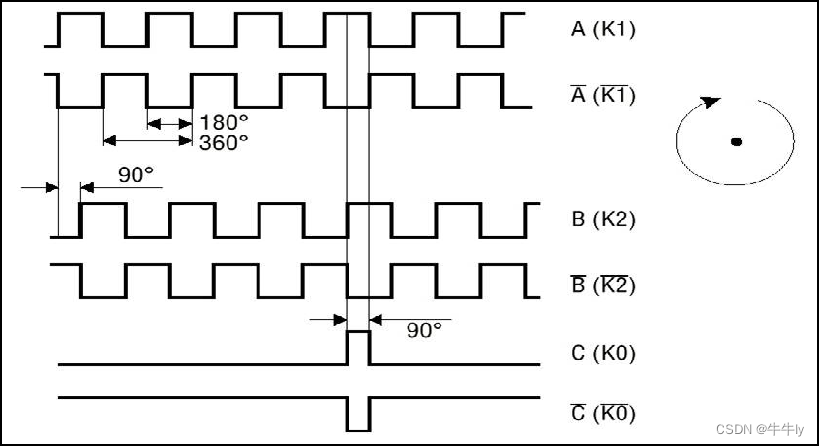
增量式编码器:增量式编码器通常有3个信号输出,分别为A相、B相、Z相(有些也标称为C相)输出,A相与B相之间相互延迟1/4周期(90度)的脉冲输出,根据延迟关系可以区别正反转,而且通过取A相、B相的上升和下降沿可以进行2或4倍频;Z相为单圈脉冲,即每圈发出一个脉冲。 增量测量法的光栅由周期性栅条组成。位置信息通过计算自某点开始的增量数(测量步距数)获得。由于必须用绝对参考点确定位置值,因此圆光栅码盘还有一个参考点轨。将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。

当A相的上升沿B相对应是低电平就是正转, 当A相的上升沿B相对应是高电平就是反 转,
2.磁编码器(绝对式编码器):
绝对式编码器:就是对应一圈,每个基准的角度发出一个唯一与该角度对应二进制的数值,通过外部记圈器件可以进行多个位置的记录和测量。 通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。 编码盘是按照一定的编码形式制成的圆盘。如中a)是二进制的编码盘,b)是格雷码编制,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。如果编码盘有4个码道,可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、…、1111。
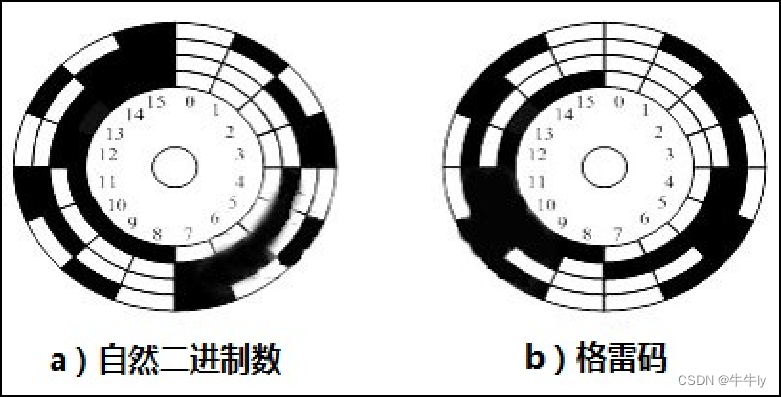
格雷码说明:于制造和安装精度的影响,码盘回转在交替码段过程中会产生读数误差,该误差可用格雷码盘形式避免,该盘特点:任意相邻的两个代码间只有一位代码变化。 编码器通电时就可立即得到位置值并随时供后续信号处理电子电路读取。无需移动轴执行参考点回零操作。绝对位置信息来自圆光栅码盘,它由一系列绝对码组成。单独的增量刻轨信号通过细分生成位置值,同时也能生成供选用的增量信号。 单圈编码器的绝对位置值信息每转一圈重复一次。多圈编码器也能区分每圈的位置值。
3.增量式编码器和绝对式编码器区别
在增量编码器的情况下,位置是从零位标记开始计算的脉冲数量确定的;而绝对型编码器的位置是由输出代码的读数确定的,在一圈里,每个位置的输出代码的读数是唯一的,因此当电源断开时,绝对型编码器并不与实际的位置分离。如果电源再次接通,那么位置读数仍是当前的、有效的,不像增量编码器那样,必须去寻找零位标记。
3.编码器几个重要概念:
1.分辨率:编码器的轴每转一圈所输出的脉冲数。编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
2.最大响应频率:编码器在1秒钟内能响应的最大脉冲数。其公式为: 最高响应频率(Hz) = 编码器分辨率 × 轴的转速(r/min)/60 另称PPS
3.最大转速:是指编码器机械系统能够承受的最高转速。
4.绝对编码器信号传输方式:并行、串行输出或总线型输出。输出电路与增量编码器相似,有集电极开路PNP、NPN型、差分驱动、推挽式。
增量式编码器信号接口:由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。 单相(线)连接,单端信号,用于单方向计数,单方向测速。 A、B两相连接,单端信号,用于正反向计数、判断正反向和测速。 A、B、Z三相连接,单端信号,用于带参考位修正的位置测量。 A、A-,B、B-,Z、Z-连接,差分信号,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。
4.STM32的编码器接口:
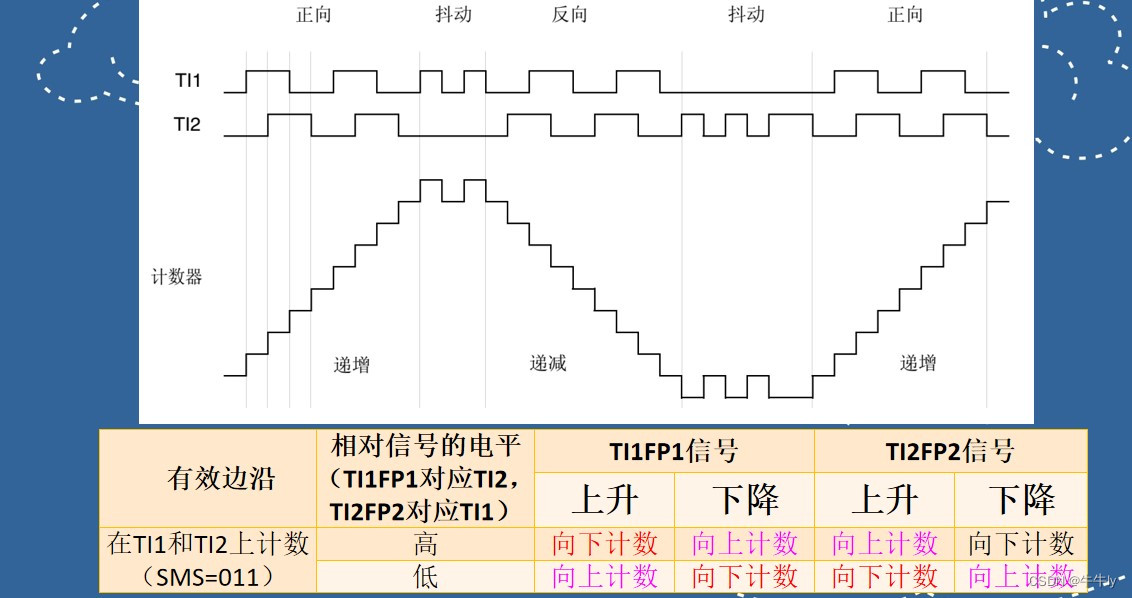
高级控制定时器和通用定时器有专用编码器接口模式 两个输入TI1和TI2被用来作为编码器的接口,设置TIMx_SMCR寄存器中SMS=001,则计数器只在TI2的边沿计数;设置SMS=010,只在TI1的边沿计数;设置SMS=011,则计数器同时在TI1和TI2边沿计数。 通过设置TIMx_CCER寄存器中的CC1P和CC2P位,可以选择TI1和TI2极性;结合SMS位控制,可以实现2、4倍频检测。CC1NP和CC2NP必须保持低电平。 如果需要,还可以对输入滤波器编程。
TI1和TI2两个输入用于连接增量编码器。如果使能计数器(在TIMx_CR1寄存器的CEN位中写入“1”),则计数器的时钟由TI1FP1或TI2FP2上的每次有效信号转换提供。TI1FP1和TI2FP2是进行输入滤波器和极性选择后TI1和TI2的信号,如果不进行滤波和反相,则TI1FP1=TI1,TI2FP2=TI2。将根据两个输入的信号转换序列,产生计数脉冲和方向信号。
根 据该信号转换序列,计数器相应递增或递减计数,同时硬件对TIMx_CR1寄存器的DIR位进行相应修改。任何输入(TI1或TI2)发生信号转换时,都会计算DIR位,无论计数器是仅在TI1或TI2边沿处计数,还是同时在TI1和TI2处计数。 编码器接口只能是TI1和TI2,TI3和TI4是不具备编码器功能的。

编码器接口模式就相当于带有方向选择的外部时钟。这意味着,计数器仅在0到 TIMx_ARR寄存器中的自动重载值之间进行连续计数(根据具体方向,从0递增计数到ARR,或从ARR递减计数到0)。因此,在启动前必须先配置TIMx_ARR。同样,捕获、比较、预分频器、重复计数器及触发输出功能继续正常工作。编码器模式和外部时钟模式2不兼容,因此不能同时选择。

在此模式下,计数器会根据增量编码器的速度和方向自动进行修改,因此,其内容始终表示编码器的位置。计数方向对应于所连传感器的旋转方向。
外部增量编码器可直接与MCU相连,无需外部接口逻辑。不过,通常使用比较器将编码器的差分输出转换为数字信号。这样大幅提高了抗噪声性能。用于指示机械零位的第三个编码器输出可与外部中断输入相连,用以触发计数器复位。
5.实例
实例:显示了计数信号的产生和方向控制。它还显示了当选择了双边沿时,输入抖动是如何被抑制的;抖动可能会在传感器的位置靠近一个转换点时产生。
配置如下:
1。CC1S=“01”(TIMx_CCMR1寄存器,TI1FP1映射到TI1上)。 CC2S=“01”(TIMx_CCMR1寄存器,TI2FP2映射到TI2上)。
2.CC1P=“0”,CC1NP=“0”,且IC1F=“0000”(TIMx_CCER寄存器,TI1FP1未反相,TI1FP1=TI1)。
3.CC2P=“0”,CC2NP=“0”,且IC2F=“0000”(TIMx_CCER寄存器,TI2FP2未反相,TI2FP2=TI2)。
4.SMS=“011”(TIMx_SMCR寄存器,两个输入在上升沿和下降沿均有效)。
5.CEN=“1”(TIMx_CR1寄存器,使能计数器)。
就算从正转到反转或者反转到正转产生的抖动对于计数是不会有影响的。
![[附源码]java毕业设计网上购物商城](https://img-blog.csdnimg.cn/8d515621769847608eaa14122656e625.png)