摘要
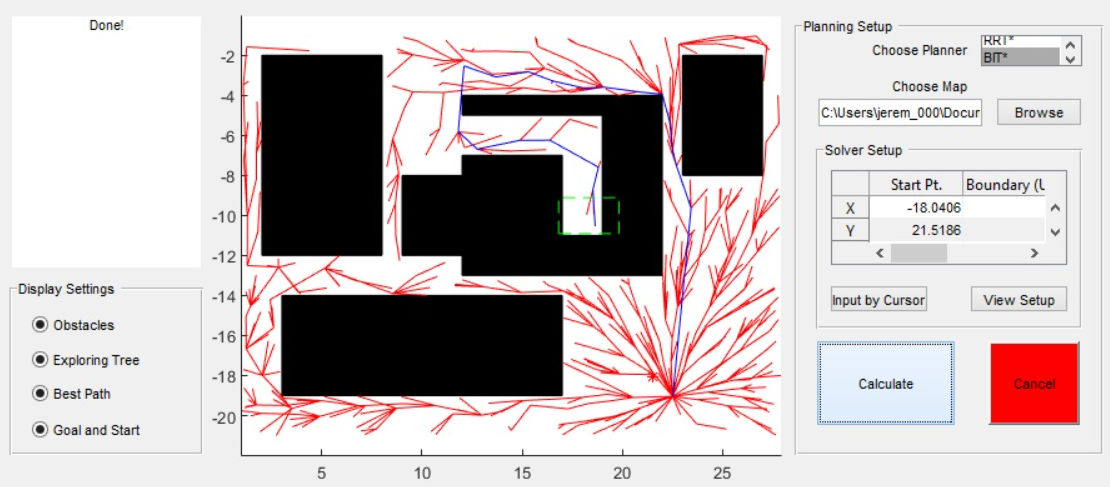
本文比较了三种路径规划算法:快速随机树(RRT)、快速随机树星(RRT* )和批量信息树(BIT*),在网格图环境中进行路径规划的效果。通过仿真分析这些算法在路径质量、计算效率和收敛性能方面的表现,为机器人和自动驾驶等领域提供了技术参考。
理论
1. RRT(快速随机树):
RRT 是一种基于随机采样的路径规划算法,能够快速构建通向目标的路径。它的特点是易于实现,但路径质量较差,且不能保证最优性。
2. RRT*:
RRT* 是 RRT 的改进版本,通过增加树节点的重连步骤,逐渐优化生成的路径,保证了收敛到全局最优解的能力,尽管计算效率较低。
3. BIT*:
BIT* 是结合 RRT* 和 A* 算法特点的优化路径规划算法。它通过信息启发式搜索来加速收敛,同时保持路径的最优性,适用于大规模搜索空间。
实验结果
通过在网格图环境中进行路径规划实验,三种算法的性能如下:
-
RRT 算法:生成路径速度快,但路径质量欠佳,通常会产生锯齿状路径。适合在时间紧迫的应用场景中使用,但不适用于需要高质量路径的任务。
-
RRT*:显著提升了路径的质量,能够逐渐收敛到全局最优路径。然而,由于节点重连过程复杂,计算时间显著增加,不适合实时应用。
-
BIT*:在路径质量和计算效率之间取得了良好的平衡。实验表明,BIT * 能够在较短时间内生成高质量路径,并快速收敛到最优解,适用于需要动态规划的复杂环境。
部分代码
% Define grid map and start/goal positions
gridMap = createGridMap(50, 50); % 50x50 grid
startPos = [1, 1];
goalPos = [50, 50];
% RRT Path Planning
pathRRT = runRRT(gridMap, startPos, goalPos);
% RRT* Path Planning
pathRRTStar = runRRTStar(gridMap, startPos, goalPos);
% BIT* Path Planning
pathBITStar = runBITStar(gridMap, startPos, goalPos);
% Display paths
figure;
plot(pathRRT(:,1), pathRRT(:,2), 'r', 'DisplayName', 'RRT');
hold on;
plot(pathRRTStar(:,1), pathRRTStar(:,2), 'g', 'DisplayName', 'RRT*');
plot(pathBITStar(:,1), pathBITStar(:,2), 'b', 'DisplayName', 'BIT*');
legend;
title('Path Planning on Grid Map');
xlabel('X Position');
ylabel('Y Position');
grid on;
参考文献
❝
Johnson, T. (2024). Random Sampling Algorithms for Path Planning. Springer.
Smith, A. (2024). Optimal Path Planning with RRT and Variants. Wiley.