写在前面:
🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝
个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。
🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒
若您觉得内容有价值,还请评论告知一声,以便更多人受益。
转载请注明出处,尊重原创,从我做起。
👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜
在这里,您将收获的不只是技术干货,还有思维的火花!
📚 系列专栏:【运动控制】系列,带您深入浅出,领略控制之美。🖊
愿我的分享能为您带来启迪,如有不足,敬请指正,让我们共同学习,交流进步!
🎭 人生如戏,我们并非能选择舞台和剧本,但我们可以选择如何演绎 🌟
感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行~~~
文章目录
- 引言
- 一、Carsim 软件设置
- 1.1 初速度
- 1.2 制动与转向
- 1.3 变速器
- 1.4 输入输出
- 1.5 仿真时间
- 二、整合油门刹车标定表
- 2.1 整合必要性
- 2.2 油门采集程序
- 2.3 刹车采集程序
- 2.4 数据处理
- 三、油门刹车表定标的应用
- 3.1 使用标定表进行纵向控制
- 3.2 加速度策略与速度匹配
- 3.3 模型运行与初步结果分析
- 3.4 加入 PID 控制器以优化控制效果
- (1) 比例控制器
- (2) 积分控制器
- (3) 微分控制器
- 四、PID 算法各项的作用
- 4.1 比例项
- 4.2 积分项
- 4.3 微分项
- 4.4 微分项与积分项的对比
- (1) 微分项的预测作用
- (2) 积分项的滞后作用
- 五、PID参数整定
- 5.1 整定顺序
- 5.2 比例参数的调整
- 5.3 积分参数的调整
- 5.4 微分参数的调整
- 六、横纵向控制
- 6.1 参考轨迹生成
- 6.2 参数调整
- 6.3 模型打包
- 七、进阶学习
- 八、总结
- 参考资料
引言
各位小伙伴们大家好,本篇博客是自动驾驶控制算法第 11 节,在第 9 节和第 10 节讲了如何制作电机模型、怎么做油门刹车标定表,本篇博客讲解如何用标定表做纵向控制。内容整理自 B站知名up主 忠厚老实的老王 的视频,作为博主的学习笔记,分享给大家共同学习。
一、Carsim 软件设置
1.1 初速度
首先看一下软件的设置,用 GitHub 上的代码跑出问题的很大原因就是初速度,初速度是不是为 0 0 0?如果初速度如果不是 0 0 0 ,就会出错。
1.2 制动与转向
除了初速度之外,还有制动以及转向,不要做任何在 Carsim 软件里预设的制动和转向,而要在 Simulink 上去做。

1.3 变速器
Carsim 默认的变速器是五档的,要改成一档变速器,把换挡的时间改短一点,也就是认为没有换挡,像电动车一样。

1.4 输入输出
选择 Choose run to get export information,在里面选择最上面 Quick Start 里的 Baseline。
- 输入:发动机的扭距以及制动压力
- 输出:
v
x
v_x
vx、
a
x
a_x
ax 以及发动机转速
AV_Eng
可以根据单位用 Select by units 选择:

1.5 仿真时间
最后把仿真的时间改长一点,因为做纵向标定时,特别是快速减速的话,需要很长时间才能停下来,所以要把时间弄改长一点:

一切准备就绪后,点击 Send to simulink。
二、整合油门刹车标定表
2.1 整合必要性
现在希望把油门和刹车做到一张表上,这样就不需要两个表了,所以先做一张总表,不需要两个分开的刹车油门表,这主要是要考虑控制的连续性,做到一张表上,油门和刹车可以在一些没采到的点做插值处理。
如果把它做到一张表,会变得更加平顺,如果是两个表的话,从零开始到加速还好,但是一旦从比较高的速度减速,如果是两个表就很难过渡,比如规划速度是 10 m / s 10m/s 10m/s,但现在速度是 50 m / s 50m/s 50m/s,要减速的话,一开始肯定会会猛踩刹车,但是一旦刹车已经踩到让车速已接近 10 10 10 时,如果调教不好,可能会出现一下子刹车过头的现象,速度右就小于 10 10 10 了,此时,系统又可能过度补偿,导致速度超过 10 m / s 10 m/s 10m/s,从而产生振荡现象,即速度忽高忽低,无法稳定在目标值附近。
这种振荡现象主要由于两个表之间缺乏有效的协调机制。在减速过程中,系统需要同时调整油门和刹车,才能实现平稳过渡。而两个表的结构难以实现这种复杂的控制逻辑,导致系统出现过度反应和补偿。
相比之下,使用一张油门刹车总表可以实现更平滑的控制,可以自动进行插值,因此可以根据当前速度和目标速度,计算出合适的加速度值,从而实现平稳过渡。
定义统一的油门刹车信号 x x x,如果是正数,就代表油门;负数代表刹车,但此信号还不能直接用,因为要接在油门和刹车上,所以还要写函数来切换。函数的输入是 x x x,输出就是油门和刹车。
function [thr,brake] = fcn(x)
%正数代表油门,负数代表刹车
%不允许同时踩油门和刹车
if x>=0
thr=x;%把油门赋值给x
brake=0;%把刹车弄设为0。
else
thr=0;%把油门设为0
brake=-x;%刹车设为-x
end
刹车本质是制动压力,制动压力的数值也是正的,所以要加负号。比如 x = − 1 x=-1 x=−1,就代表刹车的压力是 1 M P a 1MPa 1MPa,所以要加负号。
一切准备就绪后,编写标定程序,分成三个部分:首先油门采集代码、刹车采集代码、数据处理。
2.2 油门采集程序
throttle_calibration.m
thr=0;%初始化油门
for i=1:21
%该程序非常耗时,如果需要更多更密集的数据,请先测试
sim('calibration');
v_temp(:,i)=vx.data;
a_temp(:,i)=ax.data;
thr_temp(:,i)=ones(length(vx.data),1)*thr;
thr=thr+0.1;
end
%合并,一定要转成行向量再合并,否则会导致合并失败
v=v_temp(:,1)';
a=a_temp(:,1)';
tr=thr_temp(:,1)';
for i=2:length(a_temp(1,:))
v=[v,v_temp(:,i)'];
a=[a,a_temp(:,i)'];
tr=[tr,thr_temp(:,i)'];
end
%拟合
F=scatteredInterpolant(v',a',tr');%转成列向量
vu=0:0.1:50;
au=0:0.1:5;
table=zeros(length(vu),length(au));
for i=1:length(vu)
for j=1:length(au)
table(i,j)=F(vu(i),au(j));
end
end
2.3 刹车采集程序
在刹车代码有不一样的地方,就是初速度。在标定刹车时,初速度必须要很大, 180 k m / h 180km/h 180km/h 或 144 k m / h 144km/h 144km/h,不能为 0 0 0,这样车就不动了。因此必须要比较大的初速度,然后再标定刹车,其他的代码差不多。刹车代码和油门有点区别。
brake_calibration.m
%启动前检查车的初速度是否为180
x=0;%初始化刹车
%%刹车的初速度一定要比较高,180km/h、144km/h
for i=1:81
%该程序非常耗时,如果需要更多更密集的数据,请先测试
sim('calibration');
v_temp1(:,i)=vx.data;
a_temp1(:,i)=ax.data;
brake_temp1(:,i)=ones(length(vx.data),1)*x;
%%%%这里是消除奇异性,因为无论brake=1还是2,最后都会导致车的v,a=0;这将导致多值性
for j=1:length(v_temp1(:,i))
if v_temp1(j,i)<0.01%如果的车速足够小的话
brake_temp1(j,i)=0;%那就不要踩了,就让他用摩擦力去制动,这样的话就会消除奇异性
end
end
x=x-0.1;%每做循环, x 是要减0.1
end
a_temp1(1,:)=a_temp1(2,:);%避免初始化的问题,防止数据出现跳跃
%合并,一定要转成行向量再合并,否则会导致合并失败
vbr=v_temp1(:,1)';%要起新的名字,免得油门数据被覆盖
abr=a_temp1(:,1)';
br=brake_temp1(:,1)';
for i=2:length(v_temp1(1,:))
vbr=[vbr,v_temp1(:,i)'];
abr=[abr,a_temp1(:,i)'];
br=[br,brake_temp1(:,i)'];
end
2.4 数据处理
大家可以想想为什么油门刹车它不能写在一份代码里,非要写两份代码。
因为油门和刹车的初速度是要求不一样,油门的初速度要求从 0 0 0 开始慢慢增大,而刹车要求从 180 180 180 或者 144 144 144 开始逐渐减小到 0 0 0。所以必然要做两个设置,首先要初速度设为 0 0 0 跑一次,然后把初速度改成 180 180 180 或者 144 144 144 才可以再跑一次。所以无论如何油门和刹车的标定都不能写到一份代码里。
一切准备就绪后,开始跑就行了,跑完之后就检查一下数据,看一下有没有问题。
把初速度改成
180
180
180,再点 Send to simulink,一定要点,不点就白做了。然后再跑刹车程序,刹车标定要远比油门慢,因为刹车代码的循环多,所以如果有人觉得拿不准的话,建议先少跑几个循环,看一下数据到底对不对,数据对了再多加循环
看一下第三份数据处理代码:
v2=[v,vbr];
a2=[a,abr];
br2=[tr,br];
F=scatteredInterpolant(v2',a2',br2');%转成列向量
vubr=0:0.05:50;
aubr=-8:0.05:5;%合并刹车的-8到0和油门的0到5
tablebr=zeros(length(vubr),length(aubr));
for i=1:length(vubr)
for j=1:length(aubr)
tablebr(i,j)=F(vubr(i),aubr(j));
end
end
其实就把前两份代码,[v,vbr] 、[a,abr]、[tr,br] 合并起来,然后进行拟合,再制作总表。
总表就是油门刹车合并的总表,还是和以前一样用 2-D look up table 把表附到 Simulink 里,这样把系统打包后就可以用总表了。

把里面的变量设置一下,需要当前的速度 v v v 以及期望加速度 a a a 作为输入,输出就是油门和刹车。

三、油门刹车表定标的应用
下面看一下怎么用这张表。
3.1 使用标定表进行纵向控制
比如现在希望期望速度是
10
10
10,首先把 Carsim 的初速度改成
0
0
0,然后 Send to Simulink。使用简单的 PID 控制,在上一讲已经简略地演示过怎么控制纵向速度。就是速度和加速度要相匹配。以现在的模型举例子,比如期望速度是
10
10
10,但实际肯定是从初速度
0
0
0 开始,加速度策略要和期望速度匹配。
3.2 加速度策略与速度匹配
为了让速度和加速度匹配,需要确保加速度能够根据速度与目标速度之间的差距进行动态调整。理想情况下,初始阶段加速度应较大,以快速提升速度;随着速度接近目标值,加速度应逐渐减小,直至达到目标速度时,加速度归零。这种匹配关系可以实现平稳、无振荡的运动。
PID (比例-积分-微分) 算法 是自动控制领域常用的算法,可以有效实现加速度的匹配。在PID控制中,期望速度与当前速度的差值作为误差信号输入。PID 控制器根据误差信号计算控制量,并通过调整加速度来实现对速度的精确控制。
具体来说,PID 控制器包含三个参数:比例 ( P P P)、积分 ( I I I) 和微分 ( D D D)。比例项根据当前误差的大小来调整加速度,积分项用于消除误差的累积,微分项用于预测误差的变化趋势,并提前进行调节。通过调整这三个参数,可以使PID控制器输出合适的加速度信号,满足“初始阶段加速度大,接近目标时加速度小,达到目标时加速度为零”的控制要求。
3.3 模型运行与初步结果分析
下面来跑一下模型,结果果是这样:

可以看到确实有控制效果,但观察结果发现,速度并未精确达到 10 m / s 10m/s 10m/s,而是略低于该值。分析原因,可能是由于速度逐渐接近目标值时,期望速度与实际速度之间的差值逐渐减小,导致 PID 控制器的加速度输出也随之减小,最终无法克服惯性,使速度达到目标值。
3.4 加入 PID 控制器以优化控制效果
为了解决这一问题,可以适当增加PID控制器中的比例项 ( P P P)。比例项的大小决定了控制器对误差的响应程度。增加比例项可以使控制器在速度接近目标值时,仍保持一定的加速度输出,从而确保速度能够准确达到目标值。

在PID控制算法中,比例项 ( P P P) 是基于期望速度与实际速度之间的差值进行计算的。该差值信号乘以比例项后,输出为加速度信号。这种控制方式能够实现匹配的加速度
注意:比例项的取值会影响控制效果。如果比例项过大,可能导致系统超调或振荡。
因此,需要对比例项的输出进行限制,例如将其限制在 − 8 -8 −8 到 5 5 5 的范围内,以防止输出过大或过小,从而影响系统的控制精度和稳定性。加入限制后看看结果:

(1) 比例控制器
比例项 ( P P P) 在PID控制算法中起着放大加速度信号的作用。当实际速度与期望速度的差距逐渐缩小时,比例项的输出会相应减小,导致加速度输出也逐渐减小,从而避免速度超过期望值。但比例项的取值并非越大越好。过大的比例项会导致系统对误差信号过于敏感,即使是很小的误差也会引起较大的加速度输出,从而造成系统波动和超调,影响控制精度和稳定性。
此处就不用增益模块了,直接加 PID 模块上去:

在PID控制算法中,比例项 ( P P P) 代表对误差信号的直接响应。其输出与误差信号成正比,即误差越大,比例项输出越大。通过调整比例项系数,可以放大或缩小加速度信号,从而控制系统的响应速度。例如,将比例项系数设置为 2 2 2,则输出信号将变为原来的两倍,而将微分项和积分项系数设置为 0 0 0,则忽略微分和积分对控制的影响。
(2) 积分控制器
下面看一下积分项的作用,先把 I I I 设成 0.1 0.1 0.1,然后把 P P P 设成 2 2 2,看一下仿真效果。

观察速度曲线可以发现,系统存在明显的超调现象,但最终能够收敛到 10 m / s 10m/s 10m/s。这说明比例项 ( P P P) 能够有效地响应误差信号,并使速度逐渐接近期望值。但系统在达到稳态时仍存在一定的误差,即实际速度与期望速度之间存在微小的差距。
为了消除稳态误差,PID控制算法引入了积分项 ( I I I)。积分项的作用是对误差信号进行积分,并将积分值作为输出信号。只要实际速度与期望速度之间的差值不为零,积分项就会持续积分,从而逐渐减小误差,直至消除稳态误差。然而,积分项的引入也可能导致系统超调,即实际速度超过期望值后再逐渐回落。
积分项系数的取值会影响积分项对控制的影响程度。系数越大,积分作用越强,消除稳态误差的效果越明显,但超调现象也可能更加严重。因此,需要根据实际情况调整积分项系数,以实现最佳的稳态误差消除效果和控制稳定性。
积分控制器 ( I I I) 在PID控制算法中发挥着重要作用。尽管积分控制器会导致系统超调,但它能够有效地消除稳态误差。这是因为积分控制器会持续对误差信号进行积分,并随着时间推移,积分值会逐渐增大,从而持续减小误差,直至稳态误差消失。
与比例控制器 ( P P P) 不同,比例控制器的输出仅与当前误差信号成正比。即使比例系数设置得很大,当误差信号足够小,比例控制器的输出也会随之减小,最终失去控制作用。而积分控制器则不受此限制,只要误差存在,积分控制器就会持续工作,直至消除稳态误差。
然而,积分控制器的缺点是容易导致系统超调,即实际速度超过期望值后再逐渐回落。这是因为积分控制器对误差信号的持续积分会导致输出信号过大,从而使系统响应过度。因此,需要合理设置积分控制器系数,并在必要时与其他控制器配合使用,以避免超调现象。
(3) 微分控制器
微分控制器 ( D D D) 是PID控制算法的最后一个组成部分,其作用是对误差信号进行微分处理。微分控制器能够预测误差信号的变化趋势,并提前进行调节,从而抑制系统的振荡和超调现象。
由于实际信号是离散的,无法进行数学意义上的解析微分,因此微分控制器需要进行数值微分处理。数值微分容易引入噪声和振荡,因此需要对微分信号进行滤波处理,以去除噪声并平滑信号。
滤波参数的选择会影响微分控制器的性能。滤波参数越大,滤波效果越明显,但也会导致微分控制器对误差信号变化的响应延迟。因此,需要根据实际情况调整滤波参数,以实现最佳的滤波效果和控制性能。此处滤波参数写 10 10 10。

下面一下微分器的作用,给数值 0.1 0.1 0.1,跑一下看看效果。

微分项在PID控制中的作用是抑制超调现象。当比例项导致系统出现超调时,微分项便开始发挥作用。在实际应用中,比例项之所以会引起超调,是因为信号存在延迟。与仿真环境不同,实际系统中的信号响应并非瞬时完成。无论是刹车、油门操作,还是发动机和电机的启动,都存在一定的响应时间。
这种延迟导致当比例项作用时,系统可能会产生超调,因为在仿真中假设信号是瞬间到达的,而在实际中则不是这样。因此,微分项在仿真中可能不会显现出其作用,但在实际应用中,它是必要的,以补偿信号延迟带来的影响。
可以通过模拟来理解这一点,假设从发出油门或刹车信号到电机或制动系统开始响应之间存在 100 m s 100ms 100ms 的延迟,并且速度数据从传感器传到控制系统的延迟为 10 m s 10ms 10ms。这些延迟在实际系统中是常见的,尤其是对于发动机来说,延迟可能会更长,而电机则可能相对快一些。
把 PID 的微分项 ( D ) (D) (D) 设为 0.1 0.1 0.1,看一下结果:

观察系统响应可以发现,在包含微分项的情况下,系统几乎不会出现超调现象。但如果移除微分项并重新运行系统,将会观察到系统开始震荡,并且出现了超调。这表明微分项的主要作用是抑制超调。
四、PID 算法各项的作用
PID控制器中的三个组成部分——比例( P P P)、积分( I I I)和微分( D D D)——通常是联合使用的。积分项的作用是消除稳态误差,但它也可能导致超调。为了减少这种超调,我们使用微分项。
4.1 比例项
比例项的作用是加速信号达到目标速度的过程。如果比例系数设置得较大,系统响应会更快,从而迅速接近期望速度。相反,如果比例系数很小,例如 0.001 0.001 0.001,即使加速度很大,系统达到期望速度的过程也会非常缓慢。
因此,比例项用于调节速度,但过大的比例系数可能导致超调。理论上,比例项本身不会引起超调,但由于实际系统中存在延迟,它可能会导致超调,此时就需要微分项来消除超调。
4.2 积分项
积分项在控制系统中并不经常使用,尽管它能消除稳态误差,但它可能引起较大的超调,并且消除这些超调相对困难。因此,除非系统误差非常大,否则通常不使用积分项。
在大多数控制场合,使用PD控制器就足够了。在实际车辆控制中,并不追求速度严格等于某个特定值,只要误差在可接受的范围内即可。过于追求精度在实际情况中并没有太大意义,只要精度达到容忍的范围内就足够了。
4.3 微分项
关于为什么微分项( D D D)能够抑制超调,这背后的原理相对复杂,涉及到自动控制理论。以下是一个简化的解释:微分项具有预测和提前控制的作用。例如,如果当前速度是 6 6 6,目标速度是 10 10 10,而预测三秒后的速度将达到 12 12 12。
在没有微分项的情况下,系统会根据当前速度( 6 6 6)和目标速度( 10 10 10)之间的差异持续加速,直到达到目标速度。然而,微分项能够预测未来的速度变化。如果当前速度是 6 6 6,而微分项预测的速度将达到 12 12 12,那么它会产生一个提前的减速信号。因为目标速度是 10 10 10,而预测的速度是 12 12 12,这会产生一个负的误差信号( − 2 -2 −2),即使当前速度低于目标速度,系统也会提前开始减速,从而抑制超调。
4.4 微分项与积分项的对比
(1) 微分项的预测作用
微分项能够预测并响应速度变化的趋势,抑制超调。
如果没有微分项,系统会持续加速,直到当前速度超过目标速度,导致超调。微分项通过提前作用,可以防止这种超调的发生,因为它可以预测并响应速度变化的趋势。
(2) 积分项的滞后作用
积分项考虑过去的误差累积,对稳态误差有消除作用。
相反,积分项具有滞后作用。积分项能够消除稳态误差的原因在于,当系统接近目标速度时,比例项的作用变得较弱,因为误差变得很小。积分项则考虑了过去的误差累积,即使当前误差很小,过去的较大误差仍然会影响积分项的输出,从而使用较大的控制作用来消除稳态误差。
五、PID参数整定
5.1 整定顺序
调整PID控制器的三个参数是一个试错过程,通常遵循一定的顺序。一般来说,首先调整比例参数( P P P),然后调整微分参数( D D D),最后调整积分参数( I I I)。控制精度只需达到一定的范围即可,不必过分追求完全精确。过度追求消除稳态误差可能会导致超调,因为为了消除稳态误差,需要增加积分参数,而为了抑制由此产生的超调,又需要增加微分参数。但这并非最佳做法,因为增加微分参数可能会放大系统中的噪声。
至于为什么微分参数会放大噪声,这涉及到控制理论中的伯德图(Bode Plot),其中微分项会导致对数幅频曲线在高频段上翘,从而放大高频噪声。这一部分的解释较为复杂,不在此详细展开。
5.2 比例参数的调整
在调整参数时,只需记住比例参数可以加快系统收敛速度,但可能会由于实际系统中的延迟而导致超调。尽管理论上比例参数本身不会引起超调,但由于延迟的存在,比例参数设置过大可能会导致超调现象。微分参数的作用正是抑制这种由比例参数引起的超调。
因此,在大多数情况下,仅使用比例和微分参数就足够了。
5.3 积分参数的调整
积分项的作用在于消除稳态误差,它能够使系统精确地收敛到目标值。但积分项的使用也可能会导致超调,而且这种由积分引起的超调通过微分项来降低是相对困难的。
虽然微分项能够较容易地降低由比例项引起的超调,但对于积分项引起的超调则效果有限。
5.4 微分参数的调整
微分项的值不宜过大,因为过大的微分项会放大噪声。因此,当积分项导致超调时,通常需要通过减小比例项来降低超调,但这会使得系统响应变慢,例如,如果比例项仅为 0.1 0.1 0.1,那么加速度会过慢,可能导致系统缓慢收敛,这也不利于控制精度的提高。
因此,如果系统误差不是特别大,通常不使用积分项,仅使用比例和微分项就足够了,这样既能保证较快的响应速度,又能满足精度要求。或者,可以添加一个非常小的积分项,以避免引起超调,这样在长时间的控制过程中,积分项也能发挥一定作用,使稳态误差逐渐收敛到 0 0 0。
六、横纵向控制
6.1 参考轨迹生成
在实际的自动控制应用中,像给定固定速度(如 10 10 10)这样的简单控制并不多见。更常见的是需要给定一个参考轨迹,让车辆按照这个轨迹行驶。因此,需要进行更复杂的控制策略设计,下面编写一个生成参考轨迹的函数。
planning
function [s,v,a] = fcn(t)
if t<10%设计两端轨迹, t 小于 10 以及 t 大于10
%这两段轨迹会保证它们之间位置速度、加速度都连续。
s=0.1*t^3/3;
v=0.1*t^2;
a=0.2*t;
else
a=2-0.1*(t-10);
v=2*t-0.05*(t-10)^2-10;
s=t^2-0.05*(t-10)^3/3-10*t+100/3;
end
在设计轨迹时,通常需要确保轨迹的连续性。设计过程通常从加速度开始,然后逐步进行积分以得到速度和位置。假设我们设计了两段轨迹,一段适用于时间 t < 10 t < 10 t<10 的区间,另一段适用于时间 t > 10 t > 10 t>10 的区间,这样的设计可以确保在两段轨迹的连接点处,位置、速度和加速度都是连续的。我们检查设计的轨迹,确认它们是连续的。
6.2 参数调整
接下来,我们分别查看这两段轨迹,希望模拟一个先加速到最大速度,然后减速到零的过程。通过观察速度曲线,我们发现速度一直在增加,因此仿真时间需要进一步延长。经过反复调试,我们将仿真时间设置为 60 60 60 秒,这看起来是一个比较合适的选择。由于对位置 s s s 也有特定的要求,因此在输出结果中,我们还需要输出车辆的 x x x 坐标,即变量 X o X_o Xo。

控制算法的实现方式是在速度PID控制的基础上,再加入位置PID控制。下面是具体的实现步骤:
首先,速度PID控制模块采用“ − + + -++ −++”模式,这意味着它不仅需要处理期望速度与实际速度之间的误差,还需要考虑来自位置控制单元的误差信号。即使实际速度与期望速度相同,如果位置存在差异,系统仍然需要调整。如果期望位置在实际位置之前,系统需要加速;如果期望位置在实际位置之后,系统则需要减速。
因此,仅仅匹配期望速度和实际速度是不够的,我们还需要将期望位置的误差信号输入到系统中。这意味着我们不仅要连接期望速度和实际速度的误差,还需要创建另一个PID控制器来处理期望位置和实际位置之间的误差,并将其纳入控制环路。
位置PID的控制输出也应当受到限制,以防止其过大,从而确保位置和速度控制的稳定性。至于加速度,我们可以在速度PID信号中加入积分项 ( I I I),并将加速度信号连接到这个积分项上。这样,一个包含双PID控制器的纵向控制模型就建立完成了,如下图所示。

运行查看结果,下面分别是位置、速度、加速度曲线:
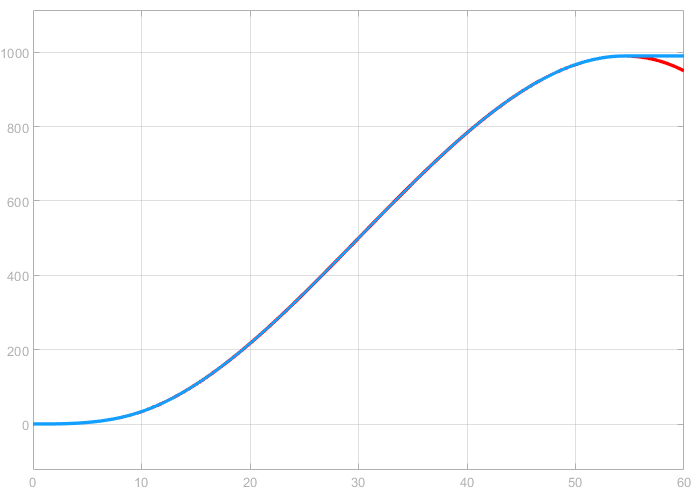
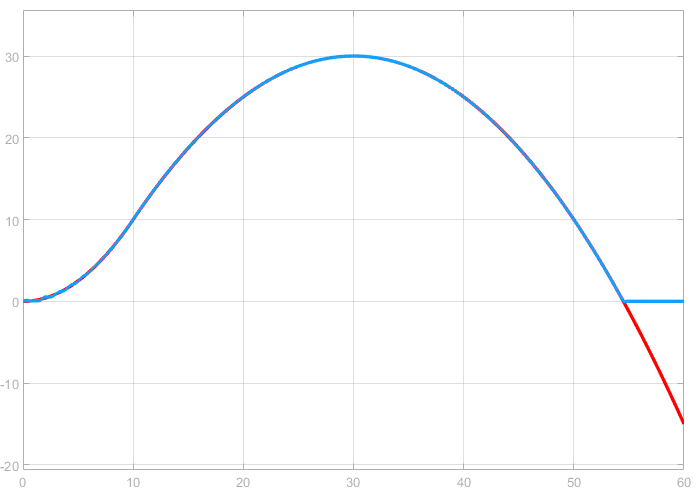
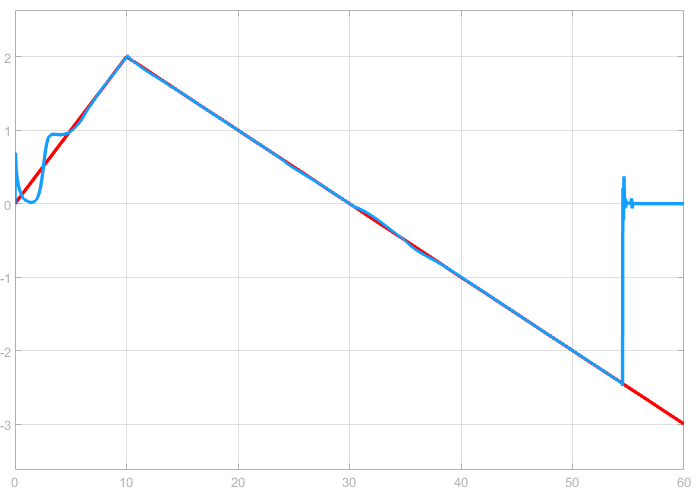
总的来说,位置跟踪和速度跟踪还算可以,加速度在前面有点不太好,可以再调一调。这里直接给出比较好参数:
- 位置PID: P = 1 , I = 0 , D = 0.1 , N = 30 P=1,I=0,D=0.1,N=30 P=1,I=0,D=0.1,N=30
- 速度PID: P = 1 , I = 0 , D = 0.1 , N = 30 P=1,I=0,D=0.1,N=30 P=1,I=0,D=0.1,N=30
这样调出来的效果比较好。
6.3 模型打包
这样纵向控制模型就讲完了,最后把模型也打个包:

至此,我们已经讨论了纵向控制和横向控制的内容。接下来将探讨横纵向控制。首先移除延迟模块,采取由简入繁的方式,先考虑无延迟的情况,再考虑有延迟的情况。因此,本节是关于纵向控制的第十一节,结合之前的第八节横向控制,在下一节将结合起来讨论横纵向控制。
在最后一节结束后,这个系列课程将正式完结。虽然还有很多内容没有涉及,比如如何规划、如何估算坡度、如何考虑质量变化对控制的影响等问题,这些内容实际上已经超出了纯粹控制理论的范畴。虽然这些知识也可以讲解,但它们并不完全属于控制领域。
因此,博主计划将横纵向控制作为基础篇章,后续将更复杂的内容作为专题和进阶篇章进行讲解。对于技术层面来说,横纵向控制的基础知识讲解完成后,基本的学习目标也就达到了。
七、进阶学习
实际上,如果各位学习到了最后一讲,可能会逐渐意识到对计算速度提升的迫切需求。虽然使用 Matlab 进行仿真是一个不错的选择,但当涉及到实际开发时,Matlab 的计算速度就显得过于缓慢。因此,Matlab 更适合作为学习工具,而不是开发者的软件。对于开发来说,无论愿意与否,最终都不得不转向使用 C++。
对于没有 C++ 基础的同学来说,可能会感到抵触,因为 C++ 确实是一门难以学习和使用的语言。但无可否认的是,C++ 的执行速度非常快,而这正是我们需要的。特别是当我们想要开发一些真正有意义的项目时,不使用C++ 是不现实的。如果计算速度过慢,那么在无人驾驶等领域,车辆可能已经发生事故,而计算却还未完成,这是完全不可接受的。
因此,无论从哪个角度来看,学习并使用 C++ 都是必要的。在基础篇章使用 Matlab 完成讲解之后,进阶篇章可能会采用 C++ 和 Matlab 相结合的方式,即在 C++ 中编写代码,同时使用 Matlab 进行仿真,这样的形式更接近实际工程。不过,这些都是未来的计划。
八、总结
本篇博客详细介绍了自动驾驶控制算法中的纵向控制,从软件设置到标定表的应用,再到PID控制器的整定和实际模型运行,我们共同学习并探讨了如何实现平稳、无振荡的车辆运动。通过调整PID控制器中的比例、积分和微分参数,我们能够精确控制车辆的速度,实现与期望速度相匹配的加速度策略。同时,我们理解到,为了实现更好的控制效果,需要对PID参数进行适当的整定,平衡系统的响应速度和稳定性。最后,我们还探讨了如何将控制算法应用于实际的自动驾驶场景中,以及未来学习计划。
本篇博客的讲解就到这里,感谢大家阅读。
参考资料
【基础】自动驾驶控制算法第十一讲 纵向双pid控制
后记:
🌟 感谢您耐心阅读这篇关于 深度解析车辆纵向控制 | 双 PID 控制算法 的技术博客。 📚
🎯 如果您觉得这篇博客对您有所帮助,请不要吝啬您的点赞和评论 📢
🌟您的支持是我继续创作的动力。同时,别忘了收藏本篇博客,以便日后随时查阅。🚀
🚗 让我们一起期待更多的技术分享,共同探索移动机器人的无限可能!💡
🎭感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行 🚀



















