往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- 持续更新中……
概述
功能简介
DSI(Display Serial Interface)是由移动行业处理器接口联盟(Mobile Industry Processor Interface (MIPI) Alliance)制定的规范,旨在降低移动设备中显示控制器的成本。它以串行的方式发送像素数据或指令给外设(通常是LCD或者类似的显示设备),或从外设中读取状态信息或像素信息;它定义了主机、图像数据源和目标设备之间的串行总线和通信协议。
MIPI DSI具备高速模式和低速模式两种工作模式,全部数据通道都可以用于单向的高速传输,但只有第一个数据通道才可用于低速双向传输,从属端的状态信息、像素等是通过该数据通道返回。时钟通道专用于在高速传输数据的过程中传输同步时钟信号。
图1显示了简化的DSI接口。从概念上看,符合DSI的接口与基于DBI-2和DPI-2标准的接口具有相同的功能。它向外围设备传输像素或命令数据,并且可以从外围设备读取状态或像素信息。主要区别在于,DSI对所有像素数据、命令和事件进行序列化,而在传统接口中,这些像素数据、命令和事件通常需要附加控制信号才能在并行数据总线上传输。
图 1 DSI发送、接收接口

DSI标准对应D-PHY、DSI、DCS规范,可分为四层:
- PHY Layer
PHY层指定传输介质(电导体)、输入/输出电路和从串行比特流中捕获“1”和“0”的时钟机制。这一部分的规范记录了传输介质的特性、信号的电气参数以及时钟与数据通道之间的时序关系。在DSI链路的发送端,并行数据、信号事件和命令按照包组织在协议层转换为包。协议层附加包协议信息和报头,然后通过Lane Management层向PHY发送完整的字节。数据由PHY进行序列化,并通过串行链路发送。DSI链路的接收端执行与发送端相反的操作,将数据包分解为并行的数据、信号事件和命令。如果有多个Lane, Lane管理层将字节分配给单独的物理层,每个Lane一个PHY。
- Lane Management层
负责发送和收集数据流到每条Lane。数据Lane的三种操作模式 :espace mode,High-Speed(Burst) mode,Control mode。
- Low Level Protocol层
定义了如何组帧和解析以及错误检测等。
- Application层
描述高层编码和解析数据流。这一层描述了数据流中包含的数据的更高级的编码和解释。根据显示子系统架构的不同,它可能由具有指定格式的像素或编码的位流组成,或者由显示模块内的显示控制器解释的命令组成。DSI规范描述了像素值、位流、命令和命令参数到包集合中的字节的映射。
运作机制
MIPI DSI软件模块各分层的作用为:
-
接口层:提供打开设备、写入数据和关闭设备的接口。
-
核心层:主要提供绑定设备、初始化设备以及释放设备的能力。
-
适配层:实现其它具体的功能。
说明:
核心层可以调用接口层的函数,核心层通过钩子函数调用适配层函数,从而适配层可以间接的调用接口层函数,但是不可逆转接口层调用适配层函数。
图 2 DSI无服务模式结构图

约束与限制
由于使用无服务模式,MIPI_DSI接口暂不支持用户态使用。
使用指导
场景介绍
MIPI DSI主要用于连接显示屏。
接口说明
MIPI DSI模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/mipi_dsi_if.h。
表1 MIPI DSI API接口功能介绍
| 功能分类 | 接口名 |
|---|---|
| DevHandle MipiDsiOpen(uint8_t id) | 获取MIPI DSI操作句柄 |
| void MipiDsiClose(DevHandle handle) | 释放MIPI DSI操作句柄 |
| int32_t MipiDsiSetCfg(DevHandle handle, struct MipiCfg *cfg) | 设置MIPI DSI相关配置 |
| int32_t MipiDsiGetCfg(DevHandle handle, struct MipiCfg *cfg) | 获取当前MIPI DSI相关配置 |
| void MipiDsiSetLpMode(DevHandle handle) | 设置MIPI DSI进入Low power模式 |
| void MipiDsiSetHsMode(DevHandle handle) | 设置MIPI DSI进入High speed模式 |
| int32_t MipiDsiTx(DevHandle handle, struct DsiCmdDesc *cmd) | DSI发送指令 |
| int32_t MipiDsiRx(DevHandle handle, struct DsiCmdDesc *cmd, int32_t readLen, uint8_t *out) | MIPI DSI按期望长度回读数据 |
开发步骤
使用MIPI DSI的一般流程如下图所示。
图 3 MIPI DSI使用流程图

获取MIPI DSI操作句柄
在进行MIPI DSI进行通信前,首先要调用MipiDsiOpen获取操作句柄,该函数会返回指定通道ID的操作句柄。
DevHandle MipiDsiOpen(uint8_t id);
表 2 MipiDsiOpen的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| id | uint8_t类型,MIPI DSI通道ID |
| 返回值 | 返回值描述 |
| NULL | 获取失败 |
| 设备句柄 | 获取到指令通道的操作句柄, 类型为DevHandle |
假设系统中的MIPI DSI通道为0,获取该通道操作句柄的示例如下:
DevHandle mipiDsiHandle = NULL; // 设备句柄
chnId = 0; // MIPI DSI通道ID
// 获取操作句柄
mipiDsiHandle = MipiDsiOpen(chnId);
if (mipiDsiHandle == NULL) {
HDF_LOGE("MipiDsiOpen: mipi dsi open fail.\n");
return NULL;
}
MIPI DSI相应配置
- 写入MIPI DSI配置
int32_t MipiDsiSetCfg(DevHandle handle, struct MipiCfg *cfg);
表 3 MipiDsiSetCfg的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,操作句柄 |
| cfg | 结构体指针类型,MIPI DSI相应配置buf 指针 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置MIPI DSI配置成功 |
| 负数 | 设置MIPI DSI配置失败 |
int32_t ret;
struct MipiCfg cfg = {0};
// 当前对接的屏幕配置如下
cfg.lane = DSI_4_LANES;
cfg.mode = DSI_CMD_MODE;
cfg.burstMode = VIDEO_NON_BURST_MODE_SYNC_EVENTS;
cfg.format = FORMAT_RGB_24_BIT;
cfg.pixelClk = 174;
cfg.phyDataRate = 384;
cfg.timingInfo.hsaPixels = 50;
cfg.timingInfo.hbpPixels = 55;
cfg.timingInfo.hlinePixels = 1200;
cfg.timingInfo.yResLines = 1800;
cfg.timingInfo.vbpLines = 33;
cfg.timingInfo.vsaLines = 76;
cfg.timingInfo.vfpLines = 120;
cfg.timingInfo.xResPixels = 1342;
// 写入配置数据
ret = MipiDsiSetCfg(mipiDsiHandle, &cfg);
if (ret != HDF_SUCCESS) {
HDF_LOGE("MipiDsiSetCfg: set mipi cfg fail, ret:%d\n", ret);
return ret;
}
- 获取当前MIPI DSI的配置
int32_t MipiDsiGetCfg(DevHandle handle, struct MipiCfg *cfg);
表 4 MipiDsiGetCfg的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,操作句柄 |
| cfg | 结构体指针,MIPI DSI相应配置buf 指针 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 获取当前MIPI DSI的配置成功 |
| 负数 | 获取当前MIPI DSI的配置失败 |
int32_t ret;
struct MipiCfg cfg;
memset(&cfg, 0, sizeof(struct MipiCfg));
ret = MipiDsiGetCfg(mipiDsiHandle, &cfg);
if (ret != HDF_SUCCESS) {
HDF_LOGEMipiDsiGetCfg: get mipi cfg fail, ret:%d!\n", ret);
return ret;
}
发送/回读控制指令
- 发送指令
int32_t MipiDsiTx(PalHandle handle, struct DsiCmdDesc *cmd);
表 5 MipiDsiTx的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,操作句柄 |
| cmd | 结构体指针类型,需要发送的指令数据指针 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 发送成功 |
| 负数 | 发送失败 |
int32_t ret;
struct DsiCmdDesc *cmd = OsalMemCalloc(sizeof(struct DsiCmdDesc));
if (cmd == NULL) {
return HDF_FAILURE;
}
cmd->dtype = DTYPE_DCS_WRITE;
cmd->dlen = 1;
cmd->payload = OsalMemCalloc(sizeof(uint8_t));
if (cmd->payload == NULL) {
HdfFree(cmd);
return HDF_FAILURE;
}
*(cmd->payload) = DTYPE_GEN_LWRITE;
MipiDsiSetLpMode(mipiHandle);
ret = MipiDsiTx(mipiHandle, cmd);
MipiDsiSetHsMode(mipiHandle);
if (ret != HDF_SUCCESS) {
HDF_LOGE("MipiDsiTx: mipi dsi tx fail, ret:%d\n", ret);
HdfFree(cmd->payload);
HdfFree(cmd);
return ret;
}
HdfFree(cmd->payload);
HdfFree(cmd);
- 回读指令
int32_t MipiDsiRx(DevHandle handle, struct DsiCmdDesc *cmd, uint32_t readLen, uint8_t *out);
表 6 MipiDsiRx的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,操作句柄 |
| cmd | 结构体指针类型,需要回读的指令数据指针 |
| readLen | uint32_t类型,期望回读的数据长度 |
| out | uint8_t类型指针,回读的数据 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 获取成功 |
| 负数 | 获取失败 |
int32_t ret;
uint8_t readVal = 0;
struct DsiCmdDesc *cmdRead = OsalMemCalloc(sizeof(struct DsiCmdDesc));
if (cmdRead == NULL) {
return HDF_FAILURE;
}
cmdRead->dtype = DTYPE_DCS_READ;
cmdRead->dlen = 1;
cmdRead->payload = OsalMemCalloc(sizeof(uint8_t));
if (cmdRead->payload == NULL) {
HdfFree(cmdRead);
return HDF_FAILURE;
}
*(cmdRead->payload) = DDIC_REG_STATUS;
MipiDsiSetLpMode(mipiDsiHandle);
ret = MipiDsiRx(mipiDsiHandle, cmdRead, sizeof(readVal), &readVal);
MipiDsiSetHsMode(mipiDsiHandle);
if (ret != HDF_SUCCESS) {
HDF_LOGE("MipiDsiRx: mipi dsi rx fail, ret:%d\n", ret);
HdfFree(cmdRead->payload);
HdfFree(cmdRead);
return HDF_FAILURE;
}
HdfFree(cmdRead->payload);
HdfFree(cmdRead);
释放MIPI DSI操作句柄
MIPI DSI使用完成之后,需要释放操作句柄,释放句柄的函数如下所示:
void MipiDsiClose(DevHandle handle);
该函数会释放掉由MipiDsiOpen申请的资源。
表 7 MipiDsiClose的参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,MIPI DSI操作句柄 |
MipiDsiClose(mipiHandle); // 释放掉MIPI DSI操作句柄
使用实例
本例拟对Hi3516DV300开发板上MIPI DSI设备进行操作。
MIPI DSI完整的使用示例如下所示:
#include "hdf_log.h"
#include "mipi_dsi_if.h"
#include "osal_mem.h"
#define DTYPE_DCS_WRITE 0x05
#define DTYPE_DCS_READ 0x06
#define DTYPE_GEN_LWRITE 0x29
#define DDIC_REG_STATUS 0x0A
int32_t PalMipiDsiTestSample(void)
{
uint8_t chnId;
int32_t ret;
DevHandle mipiDsiHandle = NULL;
// 设备通道编号
chnId = 0;
// 获取操作句柄
mipiDsiHandle = MipiDsiOpen(chnId);
if (mipiDsiHandle == NULL) {
HDF_LOGE("MipiDsiOpen: failed!\n");
return HDF_FAILURE;
}
// 配置相应参数
struct MipiCfg cfg = {0};
cfg.lane = DSI_2_LANES;
cfg.mode = DSI_VIDEO_MODE;
cfg.format = FORMAT_RGB_24_BIT;
cfg.burstMode = VIDEO_BURST_MODE;
cfg.timing.xPixels = 480; // 480: width
cfg.timing.hsaPixels = 10; // 10: horizontal sync porch
cfg.timing.hbpPixels = 20; // 20: horizontal back porch
cfg.timing.hlinePixels = 530; // 530: horizontal total width
cfg.timing.vsaLines = 2; // 2: vertiacl sync width
cfg.timing.vbpLines = 14; // 14: vertiacl back porch
cfg.timing.vfpLines = 16; // 16: vertiacl front porch
cfg.timing.ylines = 960; // 960: height
cfg.timing.edpiCmdSize = 0; // 0 : no care
cfg.pixelClk = 31546; // 31546: pixel clk
cfg.phyDataRate = 379; // 379: mipi clk
// 写入配置数据
ret = MipiDsiSetCfg(mipiDsiHandle, &cfg);
if (ret != 0) {
HDF_LOGE("PalMipiDsiTestSample: set mipi dsi cfg fail, ret:%d\n", ret);
return ret;
}
// 发送PANEL初始化指令
struct DsiCmdDesc *cmd = OsalMemCalloc(sizeof(struct DsiCmdDesc));
if (cmd == NULL) {
return -1;
}
cmd->dataType = DTYPE_DCS_WRITE;
cmd->dataLen = 1;
cmd->payload = OsalMemCalloc(sizeof(uint8_t));
if (cmd->payload == NULL) {
OsalMemFree(cmd);
return -1;
}
*(cmd->payload) = DTYPE_GEN_LWRITE;
MipiDsiSetLpMode(mipiDsiHandle);
ret = MipiDsiTx(mipiDsiHandle, cmd);
MipiDsiSetHsMode(mipiDsiHandle);
if (ret != HDF_SUCCESS) {
HDF_LOGE("PalMipiDsiTestSample: mipi dsi tx fail, ret:%d\n", ret);
OsalMemFree(cmd->payload);
OsalMemFree(cmd);
return ret;
}
OsalMemFree(cmd->payload);
OsalMemFree(cmd);
// 回读panel状态寄存器
uint8_t readVal = 0;
struct DsiCmdDesc *cmdRead = OsalMemCalloc(sizeof(struct DsiCmdDesc));
if (cmdRead == NULL) {
return -1;
}
cmdRead->dataType = DTYPE_DCS_READ;
cmdRead->dataLen = 1;
cmdRead->payload = OsalMemCalloc(sizeof(uint8_t));
if (cmdRead->payload == NULL) {
OsalMemFree(cmdRead);
return -1;
}
*(cmdRead->payload) = DDIC_REG_STATUS;
MipiDsiSetLpMode(mipiDsiHandle);
ret = MipiDsiRx(mipiDsiHandle, cmdRead, sizeof(readVal), &readVal);
MipiDsiSetHsMode(mipiDsiHandle);
if (ret != HDF_SUCCESS) {
HDF_LOGE("PalMipiDsiTestSample: mipi dsi rx fail, ret:%d\n", ret);
OsalMemFree(cmdRead->payload);
OsalMemFree(cmdRead);
return ret;
}
OsalMemFree(cmdRead->payload);
OsalMemFree(cmdRead);
HDF_LOGD("PalMipiDsiTestSample: mipi dsi tests end");
// 释放MIPI DSI设备句柄
MipiDsiClose(mipiDsiHandle);
return ret;
}
最后
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

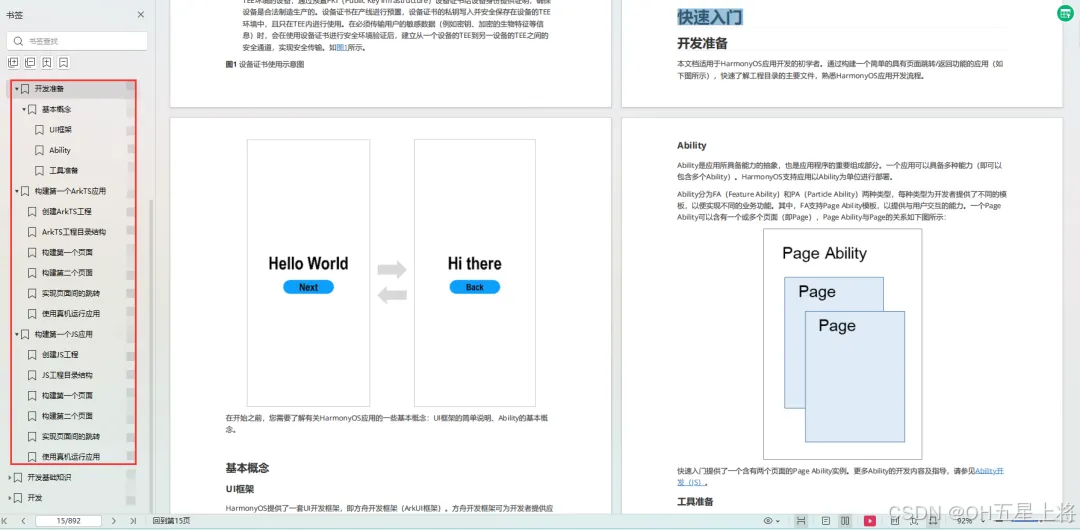
《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
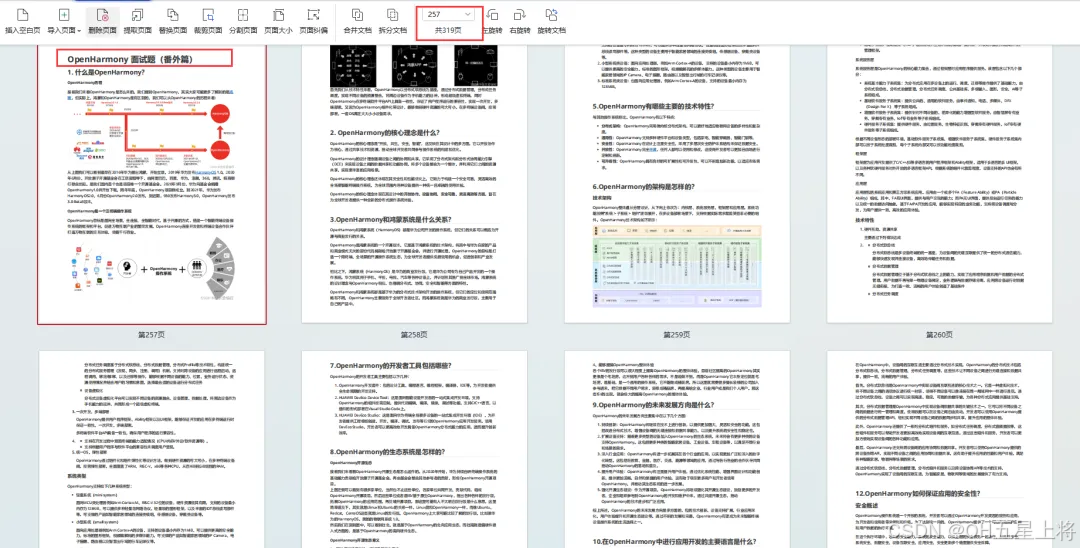
鸿蒙开发面试真题(含参考答案):
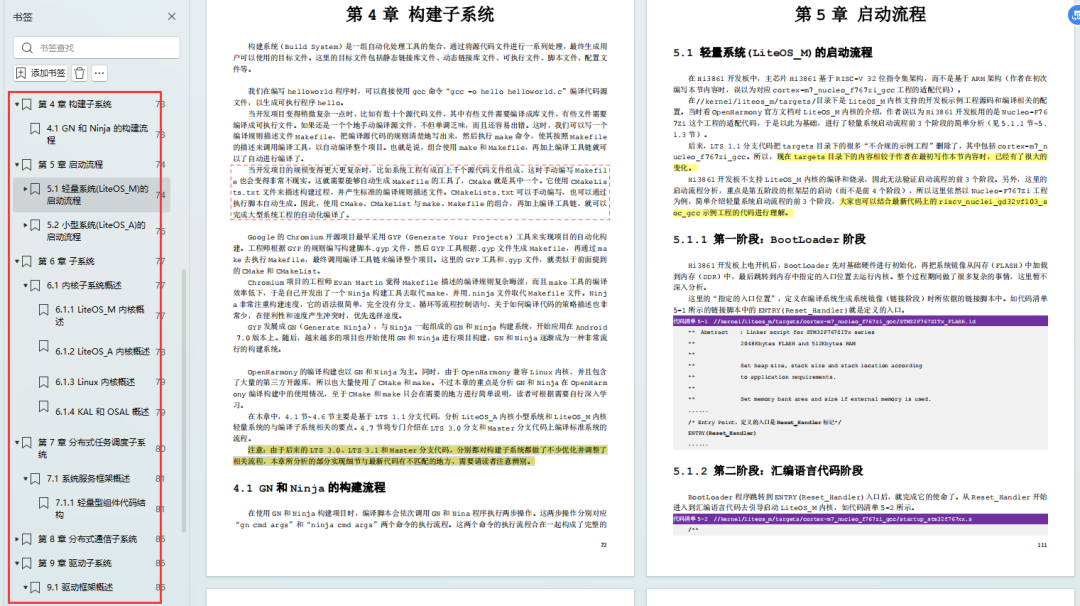
《OpenHarmony源码解析》:
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
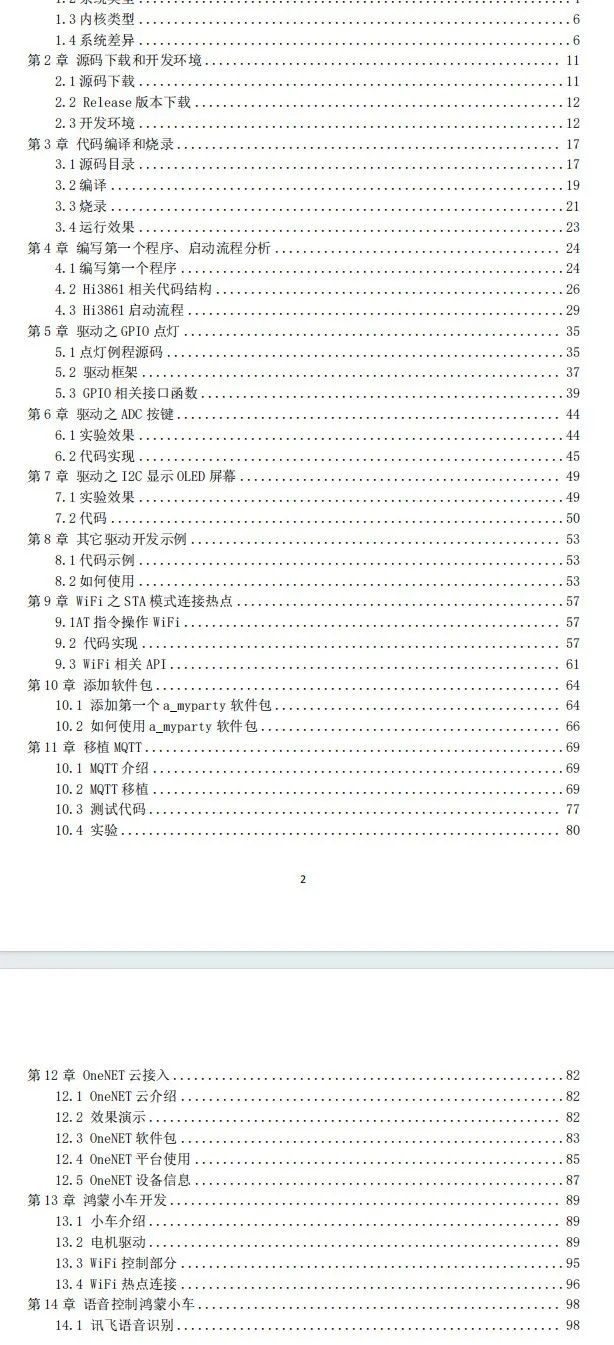
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN/733GH/overview










![[大语言模型] 情感认知在大型语言模型中的近期进展-2024-09-26](https://i-blog.csdnimg.cn/direct/d7bc1efb141043d3bf78d84a123f5d9a.png)








