摘要
本文基于蜣螂优化算法(Dung Beetle Optimization, DBO)研究了多无人机路径规划问题。目标是优化多无人机的飞行轨迹,在避免障碍物的同时,尽量减少能量消耗并保持集群内的通信。为提高搜索效率和准确性,对DBO进行了改进。通过与其他常见的元启发式算法进行对比,验证了该算法在模拟环境和实际环境中的有效性。
理论
-
多无人机路径规划: 路径规划对于无人机集群至关重要,确保它们能够安全、高效地协同导航。多无人机路径规划主要包括以下方面:
轨迹优化: 确定从起点到目的地的最优路径,同时避开障碍物。 避障: 确保每架无人机避开静态和动态障碍物。 通信约束: 无人机集群中的无人机必须保持一定的通信范围以进行协同工作。 能量效率: 降低能量消耗至关重要,因为无人机的电池寿命有限。 2. 蜣螂优化算法(DBO): 蜣螂优化算法受到蜣螂行为的启发,这种昆虫使用天体信号滚动粪球保持直线行进。这种优化类比使DBO能够解决复杂的多维优化问题。DBO的关键机制包括:
探索与开发平衡: DBO确保在全局探索(广泛搜索区域)和局部开发(在最优解附近微调)之间取得平衡。 随机游走机制: 就像蜣螂的随机方向一样,DBO使用机制避免过早收敛,并确保搜索的多样性。
实验结果
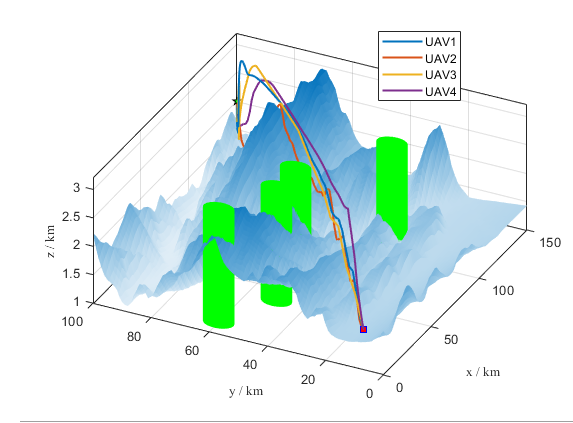
提出的基于DBO的路径规划算法在不同场景下进行了测试,包括不同的障碍密度和通信范围约束。结果如下:
测试场景1: 低障碍密度,长通信范围。 测试场景2: 中等障碍密度,中等通信范围。 测试场景3: 高障碍密度,短通信范围。 在所有测试中,DBO在总飞行距离、能量消耗和成功导航率方面表现优于粒子群优化(PSO)和遗传算法(GA)等算法。下图展示了某个测试场景中四架无人机的3D路径,图中绿色柱状体表示障碍物,蓝色表面表示山区地形,四架无人机的轨迹如图所示。
部分代码
以下是部分Matlab实现的蚁群算法代码,用于无人机巡检路径优化。
import numpy as np
# 初始化参数
num_UAVs = 4
num_iterations = 100
dung_beetles = np.random.rand(num_UAVs, 3) # 随机初始位置
def objective_function(positions):
# 定义目标函数(最小化距离,避免障碍物)
pass
def dung_beetle_optimization(dung_beetles, num_iterations):
for i in range(num_iterations):
# 根据DBO算法更新位置
for beetle in dung_beetles:
# 基于探索和开发计算新位置
new_position = beetle + np.random.uniform(-1, 1, 3)
if objective_function(new_position) < objective_function(beetle):
beetle = new_position
return dung_beetles
# 主程序
optimized_paths = dung_beetle_optimization(dung_beetles, num_iterations)
print(optimized_paths)
参考文献
❝
Reynolds, C. W. (1987). Flocks, herds and schools: A distributed behavioral model. ACM SIGGRAPH Computer Graphics, 21(4), 25-34.
Kennedy, J., & Eberhart, R. C. (1995). Particle swarm optimization. In Proceedings of ICNN'95 - International Conference on Neural Networks (Vol. 4, pp. 1942-1948).
Goldberg, D. E. (1989). Genetic algorithms in search, optimization, and machine learning. Addison