摘要
本文基于PID控制设计了一种四旋翼无人机控制系统,并通过Matlab进行仿真验证。研究了姿态控制和位置控制的性能,仿真结果表明该系统在稳定性和响应速度方面具有良好的表现。本文的主要贡献是验证了PID控制器在多轴飞行器控制中的有效性,并分析了不同控制参数对系统响应的影响。
理论
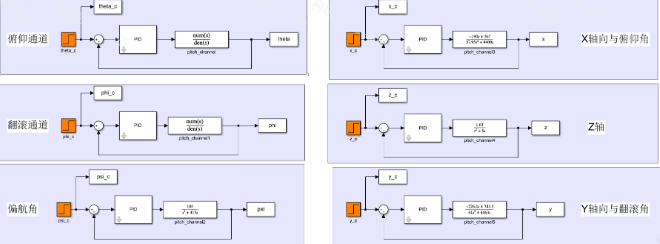
四旋翼无人机的控制系统基于PID控制器,该控制器通过调整比例、积分和微分参数实现对姿态和位置的精确控制。控制系统包括俯仰、滚转、偏航和高度控制四个通道。PID控制的基本原理是通过对误差信号进行放大、积分和微分处理,从而对控制对象施加相应的控制力,使得系统状态趋于期望值。
四旋翼无人机的动力学模型可以通过牛顿-欧拉方程建立,PID控制器通过调节输入信号来控制每个电机的转速,从而实现姿态和位置的控制。仿真中采用的模型考虑了系统的非线性和耦合特性,设计的PID控制器用于改善系统的稳态误差、响应时间和振荡现象。
实验结果
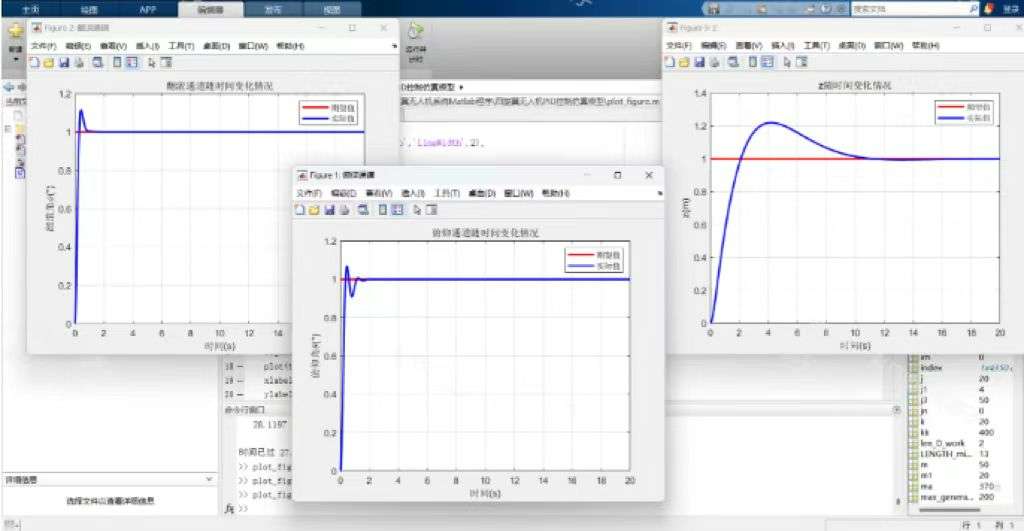
仿真结果展示了系统在不同控制器参数下的响应性能。图1展示了系统的俯仰角度响应,图2显示了高度变化的控制效果,图3为偏航角响应曲线。可以观察到,在适当的PID参数下,系统能够快速稳定地达到目标位置,并且在受到外部干扰时能够快速恢复平衡。
-
俯仰通道:PID控制器有效抑制了初始的超调量,系统能够在短时间内稳定到设定值。
-
滚转通道:控制器保证了系统在干扰下的快速恢复能力,响应时间短且无明显的振荡。
-
偏航通道:系统对输入指令的跟踪精度较高,稳态误差小。
-
高度通道:PID控制能够有效控制无人机的升降过程,稳定性良好。
部分代码
% 四旋翼无人机PID控制仿真代码
% 设置PID参数
Kp_pitch = 1.2; Ki_pitch = 0.5; Kd_pitch = 0.3;
Kp_roll = 1.1; Ki_roll = 0.4; Kd_roll = 0.3;
Kp_yaw = 1.0; Ki_yaw = 0.3; Kd_yaw = 0.2;
% 初始化状态变量
pitch = 0; roll = 0; yaw = 0;
pitch_target = 1; roll_target = 0; yaw_target = 0;
% 仿真时间设置
t = 0:0.01:20; % 仿真时间范围
pitch_response = zeros(size(t));
roll_response = zeros(size(t));
yaw_response = zeros(size(t));
% 仿真循环
for i = 2:length(t)
% 计算误差
error_pitch = pitch_target - pitch;
error_roll = roll_target - roll;
error_yaw = yaw_target - yaw;
% PID控制器输出
control_pitch = Kp_pitch * error_pitch + Ki_pitch * sum(error_pitch) * 0.01 + Kd_pitch * diff([0, error_pitch]);
control_roll = Kp_roll * error_roll + Ki_roll * sum(error_roll) * 0.01 + Kd_roll * diff([0, error_roll]);
control_yaw = Kp_yaw * error_yaw + Ki_yaw * sum(error_yaw) * 0.01 + Kd_yaw * diff([0, error_yaw]);
% 更新状态
pitch = pitch + control_pitch * 0.01;
roll = roll + control_roll * 0.01;
yaw = yaw + control_yaw * 0.01;
% 保存数据
pitch_response(i) = pitch;
roll_response(i) = roll;
yaw_response(i) = yaw;
end
% 绘制响应曲线
figure;
plot(t, pitch_response, 'r', 'DisplayName', '俯仰响应');
hold on;
plot(t, roll_response, 'g', 'DisplayName', '滚转响应');
plot(t, yaw_response, 'b', 'DisplayName', '偏航响应');
legend;
xlabel('时间 (s)');
ylabel('角度 (rad)');
title('四旋翼无人机PID控制响应');
参考文献
❝
张丽, 赵敏. 无人机控制理论及应用[M]. 电子工业出版社, 2019.
陈杰, 刘凯. 四旋翼无人机的建模与控制分析[C]. 中国自动化大会, 2022.