更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
论文标题:An active SLAM with multi-sensor fusion for snake robots based on deep reinforcement learning
-
作者:Xin Liu, Shuhuan Wen, Yaohua Hu, Fei Han, Hong Zhang, Hamid Reza Karimi
-
作者单位:燕山大学,南方科技大学,米兰理工大学
-
论文链接:https://www.sciencedirect.com/science/article/pii/S0957415824001132
2.摘要
蛇形机器人能够模仿自然界动物的运动模式,进入传统机器人无法进入的空间,适应人类无法到达的环境,并扩大人类的探索领域。然而,在未知环境下实现自主导航并同时避免障碍物,即主动SLAM(同步定位与地图构建),往往是一个挑战。本文提出了一种结合深度强化学习的多传感器融合的轮式蛇形机器人的自主避障方法。首先,我们基于正交关节设计了一种轻质材料的模块化轮式蛇形机器人结构,并在Gazebo中构建了蛇形机器人的三维模型。其次,使用基于二维激光雷达和惯性测量单元(IMU)的SLAM来实现在未知环境下的自主导航和障碍物检测。同时,提出了一种基于深度Q学习的蛇形机器人路径规划方法,以实现导航过程中的障碍物避让。最后,仿真研究和实验表明,设计的蛇形机器人能够在有障碍物的环境中实现有效的路径规划和环境建图。所提出的主动SLAM算法提高了蛇形机器人路径规划的成功率,具有更好的障碍物避让能力,并与传统的A和基于采样的RRT算法相比,减少了碰撞次数。
3.主要贡献
-
设计了一种基于正交关节的轻质模块化轮式蛇形机器人结构。蛇形机器人的关节模块和躯干模块以正交方式相互连接。使用具有高强度、低密度和强韧性的尼龙材料作为机器人结构的材料,并完成了蛇形机器人实体的构建;
-
为了验证蛇形机器人蜿蜒曲线运动的可行性,在Gazebo平台上构建了蛇形机器人的三维仿真模型。通过分析蜿蜒运动方程,获得了蜿蜒运动三个参数变化对蛇形机器人质心轨迹的影响;
-
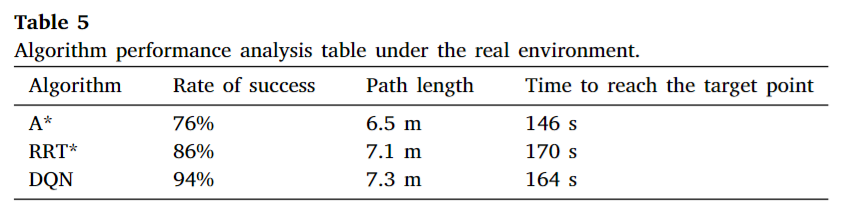
提出了一种基于深度强化学习(DRL)的主动SLAM方法,用于蛇形机器人在未知环境中实现自主导航和障碍物避让,通过多传感器融合。基于DRL的方法能够在复杂环境中进行自适应学习。将所提出算法的仿真环境扩展到实际应用中进行实验。结果表明,所提出的算法实现了多传感器融合的自主导航和有效的障碍物避让,并同时构建了环境地图,其成功率高于传统的A和基于采样的RRT算法。
4.核心思想与方法
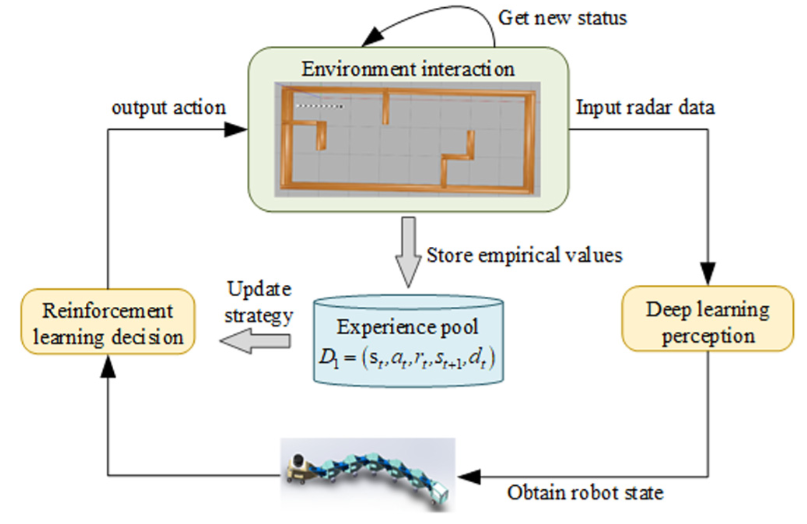
蛇形机器人使用激光雷达(LiDAR)和惯性测量单元(IMU)结合的方法来感知环境,并使用深度Q网络(DQN)来规划蛇形机器人的路径和绘制环境地图。通过将深度神经网络与Q学习相结合,DQN能够利用经验回放和目标网络等技术,在复杂环境中学习有效的策略,以实现障碍物避让等任务。
5.实验仿真验证

6.总结&展望
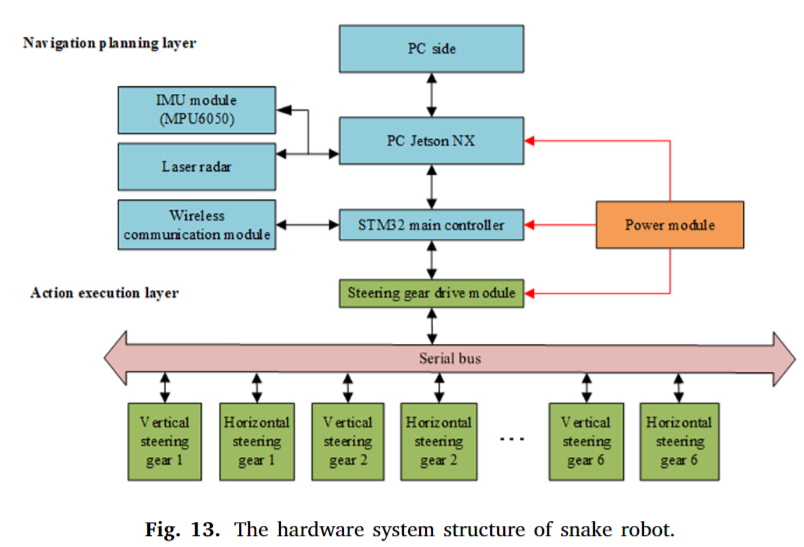
本文提出了一种基于深度Q网络(DQN)的蛇形机器人路径规划算法,实现了蛇形机器人的自主导航和环境地图构建。环境地图是通过二维激光雷达构建的。惯性测量单元(IMU)和激光雷达用于SLAM定位。通过无线通信蓝牙模块和SSH远程连接,分别在手机和PC上完成了蛇形机器人的无线控制。仿真和实验结果表明,所提出的算法实现了多传感器融合的自主导航和有效的障碍物避让,并构建了环境地图,其成功率高于传统的A*算法。在我们的工作中,蛇形机器人的输出动作是离散化的。尽管DQN在处理离散动作空间问题上表现良好,但它仍然可以通过其他强化学习方法在处理连续动作空间和提高训练稳定性方面得到扩展和改进。未来,我们将改进我们的方法,以应对复杂环境中蛇形机器人的障碍物避让问题和连续动作空间。此外,我们将进一步通过深度学习更准确地整合多源传感器信息,以实现更准确的决策制定。同时,考虑到机载传感器的计算限制,我们将引入移动边缘计算以降低系统的能耗并提高计算效率。

本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线