抽象层次非常好,广义优化工具。用于排产没有复杂的落地示例
- https://github.com/apache/incubator-kie-optaplanner/blob/main/optaplanner-examples/src/main/java/org/optaplanner/examples/projectjobscheduling/app/ProjectJobSchedulingApp.java
- https://github.com/eugenp/tutorials/tree/master/timefold-solver
- https://github.com/kisszhu/aps
安装
- java
- maven
配置
- xml配置
- solutionClass
- entityClass
- constraintProviderClass
- 约束设置
- termination: 5min
- constructionHeuristic: FIRST_FIT
- first fit
- localSearch:
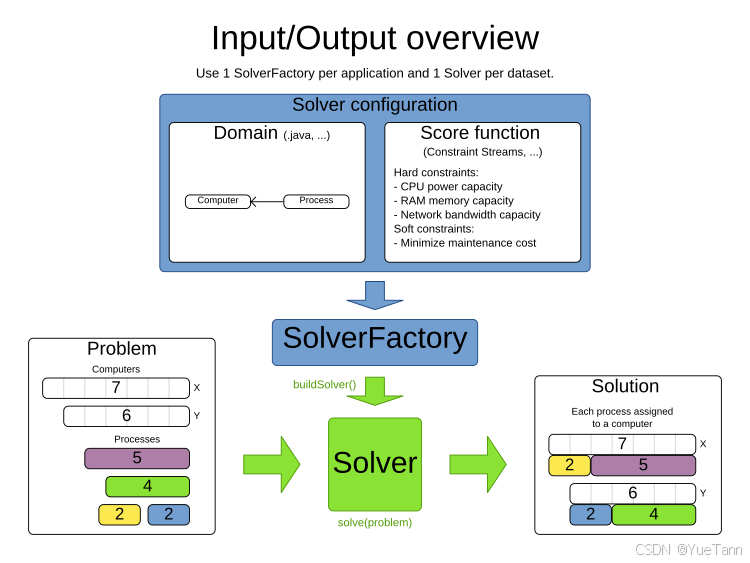
也即是说,先定义对象“entityClass”, 转化为约束“constraintProviderClass”,然后运用 constructionHeuristic + localSearch的方式进行求解
其中,一个整体的任务叫做project, 资源有可再生,非可再生。
工序叫做Job,job跟着若干project。每个工序有自己的资源,ResourceRequirement. 执行模式Execution Mode. 分配allocation.
- resourceRequirement和allocation都要设置execution mode
- 每个工序JOb, 有自己的resourceRequirement, executation mode, allocation
基本概念
- PlanningSolution
- 定义Problem,以及解
- planning entity
- Allocation
- planing variable
- executionMode
- delay
- shadow variable
- predecessorsDoneDate
- https://www.optaplanner.org/docs/optaplanner/latest/shadow-variable/shadow-variable.html
- planning score
- 核心的优化算法
约束
比如排产中的工序依赖关系
import org.timefold.solver.core.api.score.buildin.hardsoft.HardSoftScore;
import org.timefold.solver.core.api.score.stream.ConstraintProvider;
import org.timefold.solver.core.api.score.stream.Constraint;
import org.timefold.solver.core.api.score.stream.ConstraintStream;
import org.timefold.solver.core.api.score.stream.Joiners;
public class JobShopConstraintProvider implements ConstraintProvider {
@Override
public Constraint[] defineConstraints(ConstraintFactory constraintFactory) {
return new Constraint[] {
// Ensure operations follow the sequence within each job
constraintFactory.from(Operation.class)
.join(Operation.class, Joiners.filteringEach(otherOp ->
otherOp.getJob().equals(op.getJob()) &&
otherOp.getSequence() == op.getSequence() + 1
))
.penalize("Operations must follow sequence",
HardSoftScore.ONE_HARD,
(op, otherOp) -> 1),
// Ensure machine constraints are respected
constraintFactory.from(Operation.class)
.join(Operation.class, Joiners.filteringEach((op1, op2) ->
op1.getMachine().equals(op2.getMachine()) &&
op1.getEndTime() > op2.getStartTime() &&
op1.getStartTime() < op2.getEndTime() &&
!op1.equals(op2))
)
.penalize("Machine cannot process two operations at once",
HardSoftScore.ONE_HARD,
(op1, op2) -> 1)
};
}
}
官方示例
入口在APP的main
public static void main(String[] args) {
prepareSwingEnvironment();
new ProjectJobSchedulingApp().init();
}
init
public void init() {
init(null, true);
}
public void init(Component centerForComponent, boolean exitOnClose) {
solutionBusiness = createSolutionBusiness();
solverAndPersistenceFrame = new SolverAndPersistenceFrame<>(solutionBusiness, createSolutionPanel(),
createExtraActions());
solverAndPersistenceFrame
.setDefaultCloseOperation(exitOnClose ? WindowConstants.EXIT_ON_CLOSE : WindowConstants.DISPOSE_ON_CLOSE);
solverAndPersistenceFrame.init(centerForComponent);
solverAndPersistenceFrame.setVisible(true);
}
其中,solution business
- SolverFactory.createFromXmlResource建立了solver
public SolutionBusiness<Solution_, ?> createSolutionBusiness() {
SolutionBusiness<Solution_, ?> solutionBusiness = new SolutionBusiness<>(this,
SolverFactory.createFromXmlResource(solverConfigResource));
solutionBusiness.setDataDir(determineDataDir(dataDirName));
solutionBusiness.setSolutionFileIO(createSolutionFileIO());
solutionBusiness.setImporters(createSolutionImporters());
solutionBusiness.setExporters(createSolutionExporters());
solutionBusiness.updateDataDirs();
return solutionBusiness;
}
在APP类继承的solution中,示例采用的是schedule,也就是planningsolution,作为问题和排产结果
package org.optaplanner.examples.projectjobscheduling.domain;
import java.util.List;
import org.optaplanner.core.api.domain.solution.PlanningEntityCollectionProperty;
import org.optaplanner.core.api.domain.solution.PlanningScore;
import org.optaplanner.core.api.domain.solution.PlanningSolution;
import org.optaplanner.core.api.domain.solution.ProblemFactCollectionProperty;
import org.optaplanner.core.api.score.buildin.hardmediumsoft.HardMediumSoftScore;
import org.optaplanner.examples.common.domain.AbstractPersistable;
import org.optaplanner.examples.projectjobscheduling.domain.resource.Resource;
@PlanningSolution
public class Schedule extends AbstractPersistable {
private List<Project> projectList;
private List<Job> jobList;
private List<ExecutionMode> executionModeList;
private List<Resource> resourceList;
private List<ResourceRequirement> resourceRequirementList;
private List<Allocation> allocationList;
private HardMediumSoftScore score;
public Schedule() {
}
public Schedule(long id) {
super(id);
}
@ProblemFactCollectionProperty
public List<Project> getProjectList() {
return projectList;
}
public void setProjectList(List<Project> projectList) {
this.projectList = projectList;
}
@ProblemFactCollectionProperty
public List<Job> getJobList() {
return jobList;
}
public void setJobList(List<Job> jobList) {
this.jobList = jobList;
}
@ProblemFactCollectionProperty
public List<ExecutionMode> getExecutionModeList() {
return executionModeList;
}
public void setExecutionModeList(List<ExecutionMode> executionModeList) {
this.executionModeList = executionModeList;
}
@ProblemFactCollectionProperty
public List<Resource> getResourceList() {
return resourceList;
}
public void setResourceList(List<Resource> resourceList) {
this.resourceList = resourceList;
}
@ProblemFactCollectionProperty
public List<ResourceRequirement> getResourceRequirementList() {
return resourceRequirementList;
}
public void setResourceRequirementList(List<ResourceRequirement> resourceRequirementList) {
this.resourceRequirementList = resourceRequirementList;
}
@PlanningEntityCollectionProperty
public List<Allocation> getAllocationList() {
return allocationList;
}
public void setAllocationList(List<Allocation> allocationList) {
this.allocationList = allocationList;
}
@PlanningScore
public HardMediumSoftScore getScore() {
return score;
}
public void setScore(HardMediumSoftScore score) {
this.score = score;
}
// ************************************************************************
// Complex methods
// ************************************************************************
}
Timefold 示例
Solver job接受到problem,开始run
@Deprecated(forRemoval = true, since = "1.6.0")
default SolverJob<Solution_, ProblemId_> solve(ProblemId_ problemId,
Solution_ problem, Consumer<? super Solution_> finalBestSolutionConsumer,
BiConsumer<? super ProblemId_, ? super Throwable> exceptionHandler) {
SolverJobBuilder<Solution_, ProblemId_> builder = solveBuilder()
.withProblemId(problemId)
.withProblem(problem);
if (finalBestSolutionConsumer != null) {
builder.withFinalBestSolutionConsumer(finalBestSolutionConsumer);
}
if (exceptionHandler != null) {
builder.withExceptionHandler(exceptionHandler);
}
return builder.run();
}
solverStatus = SolverStatus.SOLVING_ACTIVE;
// Create the consumer thread pool only when this solver job is active.
consumerSupport = new ConsumerSupport<>(getProblemId(), bestSolutionConsumer, finalBestSolutionConsumer,
firstInitializedSolutionConsumer, exceptionHandler, bestSolutionHolder);
Solution_ problem = problemFinder.apply(problemId);
// add a phase lifecycle listener that unlock the solver status lock when solving started
solver.addPhaseLifecycleListener(new UnlockLockPhaseLifecycleListener());
// add a phase lifecycle listener that consumes the first initialized solution
solver.addPhaseLifecycleListener(new FirstInitializedSolutionPhaseLifecycleListener(consumerSupport));
solver.addEventListener(this::onBestSolutionChangedEvent);
final Solution_ finalBestSolution = solver.solve(problem);
consumerSupport.consumeFinalBestSolution(finalBestSolution);
return finalBestSolution;
理解
-
https://www.optaplanner.org/docs/optaplanner/latest/shadow-variable/shadow-variable.html
-
build_solver/ default_solver_factory
public Solver<Solution_> buildSolver(SolverConfigOverride<Solution_> configOverride) {
Objects.requireNonNull(configOverride, "Invalid configOverride (null) given to SolverFactory.");
var isDaemon = Objects.requireNonNullElse(solverConfig.getDaemon(), false);
var solverScope = new SolverScope<Solution_>();
var monitoringConfig = solverConfig.determineMetricConfig();
solverScope.setMonitoringTags(Tags.empty());
var metricsRequiringConstraintMatchSet = Collections.<SolverMetric> emptyList();
if (!monitoringConfig.getSolverMetricList().isEmpty()) {
solverScope.setSolverMetricSet(EnumSet.copyOf(monitoringConfig.getSolverMetricList()));
metricsRequiringConstraintMatchSet = solverScope.getSolverMetricSet().stream()
.filter(SolverMetric::isMetricConstraintMatchBased)
.filter(solverScope::isMetricEnabled)
.toList();
} else {
solverScope.setSolverMetricSet(EnumSet.noneOf(SolverMetric.class));
}
var environmentMode = solverConfig.determineEnvironmentMode();
var constraintMatchEnabled = !metricsRequiringConstraintMatchSet.isEmpty() || environmentMode.isAsserted();
if (constraintMatchEnabled && !environmentMode.isAsserted()) {
LOGGER.info(
"Enabling constraint matching as required by the enabled metrics ({}). This will impact solver performance.",
metricsRequiringConstraintMatchSet);
}
var innerScoreDirector = scoreDirectorFactory.buildScoreDirector(true, constraintMatchEnabled);
solverScope.setScoreDirector(innerScoreDirector);
solverScope.setProblemChangeDirector(new DefaultProblemChangeDirector<>(innerScoreDirector));
var moveThreadCount = resolveMoveThreadCount(true);
var bestSolutionRecaller = BestSolutionRecallerFactory.create().<Solution_> buildBestSolutionRecaller(environmentMode);
var randomFactory = buildRandomFactory(environmentMode);
var configPolicy = new HeuristicConfigPolicy.Builder<>(
environmentMode,
moveThreadCount,
solverConfig.getMoveThreadBufferSize(),
solverConfig.getThreadFactoryClass(),
solverConfig.getNearbyDistanceMeterClass(),
randomFactory.createRandom(),
scoreDirectorFactory.getInitializingScoreTrend(),
solutionDescriptor,
ClassInstanceCache.create()).build();
var basicPlumbingTermination = new BasicPlumbingTermination<Solution_>(isDaemon);
var termination = buildTerminationConfig(basicPlumbingTermination, configPolicy, configOverride);
var phaseList = buildPhaseList(configPolicy, bestSolutionRecaller, termination);
return new DefaultSolver<>(environmentMode, randomFactory, bestSolutionRecaller, basicPlumbingTermination,
termination, phaseList, solverScope,
moveThreadCount == null ? SolverConfig.MOVE_THREAD_COUNT_NONE : Integer.toString(moveThreadCount));
}
solver的主流程
@Override
public final Solution_ solve(Solution_ problem) {
if (problem == null) {
throw new IllegalArgumentException("The problem (" + problem + ") must not be null.");
}
// No tags for these metrics; they are global
LongTaskTimer solveLengthTimer = Metrics.more().longTaskTimer(SolverMetric.SOLVE_DURATION.getMeterId());
Counter errorCounter = Metrics.counter(SolverMetric.ERROR_COUNT.getMeterId());
solverScope.setBestSolution(problem);
solverScope.setSolver(this);
outerSolvingStarted(solverScope);
boolean restartSolver = true;
while (restartSolver) {
LongTaskTimer.Sample sample = solveLengthTimer.start();
try {
// solvingStarted will call registerSolverSpecificMetrics(), since
// the solverScope need to be fully initialized to calculate the
// problem's scale metrics
solvingStarted(solverScope);
runPhases(solverScope);
solvingEnded(solverScope);
} catch (Exception e) {
errorCounter.increment();
solvingError(solverScope, e);
throw e;
} finally {
sample.stop();
unregisterSolverSpecificMetrics();
}
restartSolver = checkProblemFactChanges();
}
outerSolvingEnded(solverScope);
return solverScope.getBestSolution();
}
- run_phase /abstract_solver
protected void runPhases(SolverScope<Solution_> solverScope) {
if (!solverScope.getSolutionDescriptor().hasMovableEntities(solverScope.getScoreDirector())) {
logger.info("Skipped all phases ({}): out of {} planning entities, none are movable (non-pinned).",
phaseList.size(), solverScope.getWorkingEntityCount());
return;
}
Iterator<Phase<Solution_>> it = phaseList.iterator();
while (!solverTermination.isSolverTerminated(solverScope) && it.hasNext()) {
Phase<Solution_> phase = it.next();
phase.solve(solverScope);
// If there is a next phase, it starts from the best solution, which might differ from the working solution.
// If there isn't, no need to planning clone the best solution to the working solution.
if (it.hasNext()) {
solverScope.setWorkingSolutionFromBestSolution();
}
}
}
-
solver外面的phase, PhaseFactory
-
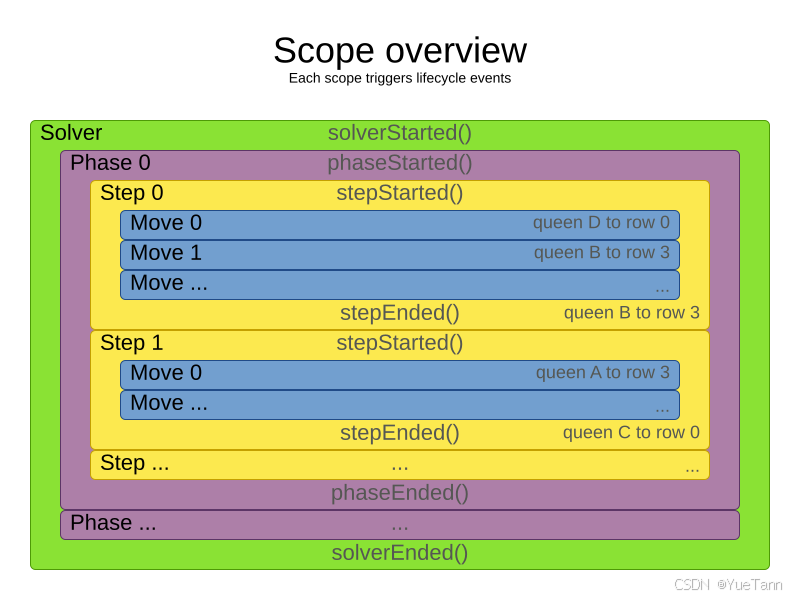
dostep
局部搜索在当前解上尝试多个移动,并选择最佳的被接受的移动作为这一步。A step is the winning Move。在每一步,它尝试所有选定的移动,除非是选定的step,否则它不会进一步研究那个解。这就是局部搜索具有很高可扩展性的原因之一。
private void doStep(CustomStepScope<Solution_> stepScope, CustomPhaseCommand<Solution_> customPhaseCommand) {
InnerScoreDirector<Solution_, ?> scoreDirector = stepScope.getScoreDirector();
customPhaseCommand.changeWorkingSolution(scoreDirector);
calculateWorkingStepScore(stepScope, customPhaseCommand);
solver.getBestSolutionRecaller().processWorkingSolutionDuringStep(stepScope);
}
- 决定下一步
- A MoveSelector which selects the possible moves of the current solution. See the chapter move and neighborhood selection.
- An Acceptor which filters out unacceptable moves.
- A Forager which gathers accepted moves and picks the next step from them.
<localSearch>
<unionMoveSelector>
...
</unionMoveSelector>
<acceptor>
...
</acceptor>
<forager>
...
</forager>
</localSearch>
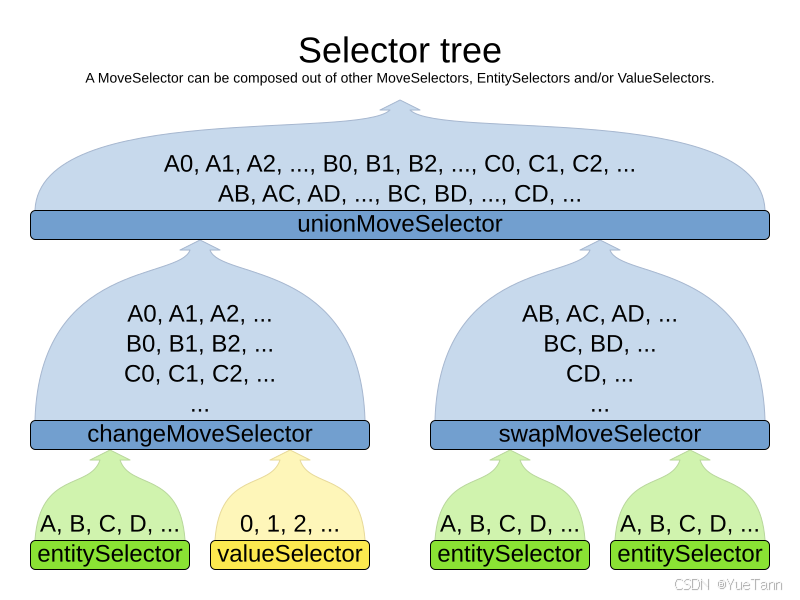
从底向上看,理解可能的move。如果是entity+value组合,或者是entity和entity进行新的组合。也许这就是叫做组合优化的原因?



















