系列文章目录
1. stm32之I2C通信协议
文章目录
- 系列文章目录
- 前言
- 一、电路接线图
- 二、应用案例代码
- 三、应用案例分析
- 3.1 I2C通信模块
- 3.2 MPU6050模块
前言
提示:本文主要用作在学习江科大自化协STM32入门教程后做的归纳总结笔记,旨在学习记录,如有侵权请联系作者
本案例实现了一个stm32使用软件I2C通信读写MPU6050陀螺仪、加速度传感器的功能,最终我们将MPU6050的实时数据显示在了OLED上。OLED最上面显示的是设备ID号,左下角三个是加速度传感器的输出数据,分别为X轴、Y轴和Z轴的加速度。右边三个是陀螺仪传感器的输出数据,分别为X轴、Y轴和Z轴的角速度。当我们改变MPU6050传感器的姿态这六个数据就会相应地变化。
一、电路接线图

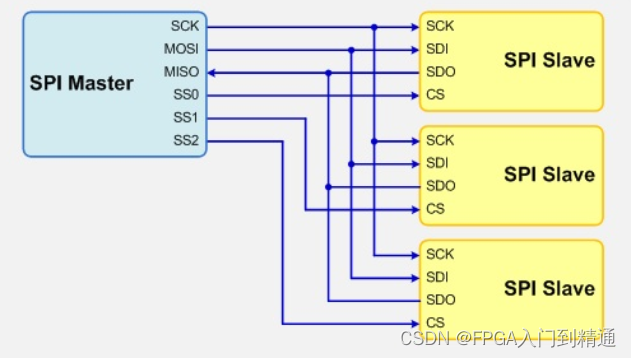
在这里,stm32作为主机,MPU6050作为从机,是一主一从的模型。
j接线方面,MPU6050模块的VCC和GND分别接到电源的正负极进行供电,SCL接到stm32的PB10口,SDA接到stm32的PB11口。XCL和XDA用于扩展的接口这里暂时用不到就先不接。AD0引脚可用于修改从机地址的最低位,如果有需要可以接上,这里由于模块内置了下拉电阻,所以引脚悬空的话相当于接地。最后INT,中断信号输出脚,我们暂时用不到先不接。
由于本次通信使用的是软件模拟I2C,就是用普通的GPIO口手动翻转电平实现的协议,它并不需要stm32内部的外设资源支持,所以这里的端口其实可以任意指定,我们只需要在程序中指定好即可。这算是软件I2C相比于硬件I2C的一大优势,就是端口不受限,可以任意指定。
注意:根据I2C协议的硬件电路规定SCL和SDA都应该外挂一个上拉电阻的,但是由于MPU6050模块本身内部就已经集成了上拉电阻了,所以这里就不需要再外挂上拉电阻了。
二、应用案例代码
MyI2C.h:
#ifndef __MYI2C_H
#define __MYI2C_H
void MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);
#endif
MyI2C.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
void MyI2C_W_SCL(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue);
Delay_us(10);
}
void MyI2C_W_SDA(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue);
Delay_us(10);
}
uint8_t MyI2C_R_SDA(void)
{
uint8_t BitValue;
BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11);
Delay_us(10);
return BitValue;
}
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);
}
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);
}
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}
MyI2C_W_SCL(0);
}
return Byte;
}
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
AckBit = MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}
MPU6050_Reg.h:
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
MPU6050.h:
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif
MPU6050.c:
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);
MyI2C_ReceiveAck();
Data = MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
主程序main.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
完整工程:stm32之软件I2C读写MPU6050陀螺仪、加速度传感器
三、应用案例分析
这里大概讲一下思路,细节部分我就不讲了,如果你仔细看过上一篇关于软件I2C通信的文章,那其实实现I2C通信大部分内容只不过就是一个代码逻辑思维的过程而已。
从整体架构来看主要分为I2C通信模块、MPU6050模块以及OLED模块,接下来重点分析一下I2C通信模块以及MPU6050模块。
3.1 I2C通信模块
I2C通信模块主要封装了一个模块初始化函数和六个时序单元模块。
I2C模块初始化函数:
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);
}
初始化函数里主要做了两件事,第一件事就是把SCL和SDA都初始化为开漏输出模式,第二件事就是把SCL和SDA置为高电平。
注意:这里SCL和SDA都配置为开漏输出的模式,这个原因在介绍I2C硬件电路规定时已经讲过了。
六个时序单元模块:
六个时序单元分别是起始信号、终止信号、发送一个字节、接收一个字节、发送应答以及接收应答。
发起通信、结束通信:
起始信号:SCL高电平期间,SDA从高电平切换到低电平
终止信号:SCL高电平期间,SDA从低电平切换到高电平
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);
}
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
这里要注意的是,为了保证时序的统一性,通信开始和通信结束都要把SCL跟SDA释放保持高电平状态,因为你不能保证SCL跟SDA在上一个时序的状态是怎样的。
一开始,空闲状态下SCL和SDA都处于高电平状态,没有任何设备占据总线。
当主机需要与从机通信时。首先,在SCL高电平期间主机拉低SDA产生一个起始信号S(Start),紧跟着,在起始信号之后主机把SCL拉低(为等会释放SCL产生高电平作准备)。
当主机不再需要跟主机通信时。首先,在产生终止信号之前主机先拉低SDA为后续SDA的上升沿作准备,然后释放SCL,再释放SDA,这样就产生了SCL高电平期间SDA的上升沿了,也就是终止信号了。
最后SCL和SDA无论是在起始还是结束的时候都是处于高电平的状态。
发送、接收一个字节:
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}
MyI2C_W_SCL(0);
}
return Byte;
}
发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节。
这里关于如何依次提取字节中位的操作请参考我的另一篇文章,我在这篇文章里已经详细地分析过了,这里就不再累述了,文章传送门:计算机常见运算之左移操作、右移操作以及按位与、按位或
接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
这里讲一下接收的逻辑。
首先,声明并初始化一个 uint8_t 类型的变量 Byte用于存储接收到的8位数据,初始值为 0x00,即全零。
MyI2C_R_SDA() 用于读取 SDA 线的电平状态。如果 SDA 线为高电平,则表示当前接收到的数据位是 1。如果为低电平,则是 0。
if (MyI2C_R_SDA() == 1) 检查 SDA 线的状态。如果为高电平(即接收到的数据位为 1),则将该位写入 Byte 中对应的位置。
Byte |= (0x80 >> i) 通过按位或运算将接收到的 1 设置在 Byte 中的正确位置。0x80 是 1000 0000,通过 >> i 操作依次右移,将第 i 位接收到的 1 写入 Byte 中。
当 i = 0 时,0x80 >> 0 仍然是 1000 0000,因此该位被写入 Byte 的最高位(MSB)。
当 i = 1 时,0x80 >> 1 是 0100 0000,因此该位被写入 Byte 的次高位。
依此类推,直到 i = 7 时,0x80 >> 7 是 0000 0001,该位被写入 Byte 的最低位(LSB)。
发送应答以及接收应答:
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
AckBit = MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}
发送应答: 主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
接收应答: 主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
这里要注意的是在发送或接收完应答位之后将SCL拉低的目的是为了更好地衔接时序单元。
3.2 MPU6050模块
MPU6050模块主要封装了一个模块初始化函数以及一个指定地址写函数和一个指定地址读函数。
指定地址写:
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}
指定地址写逻辑:发起起始信号 -> 从机寻址+指定读写位(0表示为写入数据) -> 接收从机应答位ACK -> 指定寄存器地址 -> 接收从机应答位ACK -> 写入一个字节数据 -> 接收从机应答位ACK -> 发起终止信号
指定地址读:
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);
MyI2C_ReceiveAck();
Data = MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
指定地址读逻辑:发起起始信号 -> 从机寻址+指定读写位(0表示为写入数据) -> 接收从机应答位ACK -> 指定寄存器地址 -> 接收从机应答位ACK -> 重新发起起始信号 -> 从机寻址+指定读写位(1表示为读取数据) -> 接收从机应答位ACK -> 读取一个字节数据 -> 主机发送应答位(1表示为非应答) -> 发起终止信号
模块初始化:
MPU6050配置参数解析如下:
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);//接触睡眠,选择陀螺仪时钟
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);//六个轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);//采用分频为10
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);//滤波参数给最大
//陀螺仪和加速度计都选择最大量程
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}