文章目录
- 一、libmodbus开发库
- 1.1 功能概要
- 1.2 源码获取
- 1.3 libmodbus与应用程序的关系
- 二、libmodbus源代码解析
- 2.1 核心函数
- 2.2 框架分析与数据结构
- 2.3 情景分析
- 2.3.1 初始化
- 2.3.2 主设备发送请求
- 2.3.3 从设备接收请求
- 2.3.4 从设备回应
- 2.4 常用接口函数
- 2.4.1 各类辅助接口函数
- 2.4.2 各类Modbus功能接口函数
- 2.4.3 数据处理的相关函数或宏定义
- 2.5 RTU/TCP关联接口函数
- 2.5.1 RTU模式关联函数
- 2.5.2 TCP模式关联函数
- 三、libmodbus移植与使用
- 3.1 移植方法
- 3.2 使用USB串口作为后端
- 3.3 libmodbus从机实验(USB串口)
- 3.4 libmodbus主机实验(USB串口)
- 3.5 使用板载串口作为后端
- 3.5.1 使用UART_Device
- 3.5.2 用作后端
- 3.6 libmodbus实验(板载串口)
一、libmodbus开发库
1.1 功能概要
libmodbus是一个免费的跨平台支持RTU和TCP的Modbus库,遵循LGPL V2.1+协议。libmodbus支持Linux、Mac Os X、FreeBSD、QNX和Windows等操作系统。libmodbus可以向符合Modbus协议的设备发送和接收数据,并支持通过串口或者TCP网络进行连接。
作为一个开源项目,libmodbus库还处于开发测试阶段,代码量还不十分庞大,文档和注释也不够全面,本章通过对libmodbus源代码的阅读过程,一方面可以进一步理解Modbus协议,同时也可以学习一个好的开源项目的代码组织及开发过程。 libmodbus的官方网站为 http://libmodbus.org/, 可以从 http://libmodbus.org/download/ 下载源代码。作为开源软件,还可以从GitHub网站获取最新版本的代码GitHub: https://github.com/stephane/libmodbus.git
1.2 源码获取
libmodbus的源码不断更新,本教程选择版本v3.1.10。打开https://github.com/stephane/libmodbus/tags ,如下图下载:

解压后,简单查看源代码根目录的构成:
- doc目录: libmodbus库的各API接口说明文档。
- m4目录: 存放GNU m4文件,在这里对理解代码没有意义,可忽略。
- src目录: 全部libmodbus源文件。
- tests目录: 包含自带的测试代码 其他文件对理解源代码关系不大,可以暂时忽略
图6-2解压libmodbus源代码:

进一步展开src代码目录,如图6-3所示:
图6-3libmodbus源码构成:

各文件作用如下:
- win32: 定义在Windows下使用Visual Studio编译时的项目文件和工程文件以及相关配置选项等。其中,modbus-9.sln默认使用Visual Studio 2008。
- Makefile.am: Makefile.am是Linux下AutoTool编译时读取相关编译参数的配置文件,用于生成Makefile文件,因为用于Linux下开发,所以在这里暂时忽略
- modbus.c: 核心文件,实现Modbus协议层,定义共通的Modbus消息发送和接收函数各功能码对应的函数。
- modbus.h: libmodbus对外暴露的接口API头文件。
- modbus-data.c: 数据处理的共通函数,包括大小端相关的字节、位交换等函数
- modbus-private.h: libmodbus内部使用的数据结构和函数定义。
- modbus-rtu.c: 通信层实现,RTU模式相关的函数定义,主要是串口的设置、连接及消息的发送和接收等。
- modbus-rtu.h: RTU模式对外提供的各API定义
- modbus-rtu-private.h: RTU模式的私有定义。
- modbus-tcp.c: 通信层实现,TCP模式下相关的函数定义,主要包括TCP/IP网络的设置连接、消息的发送和接收等。
- modbus-tcp.h: 定义TCP模式对外提供的各API定义
- modbus-tcp-private.h: TCP模式的私有定义。
- modbus-version.h.in: 版本定义文件。
1.3 libmodbus与应用程序的关系
libmodbus是一个免费的跨平台支持RTU和TCP的Modbus开发库,借助于libmodbus发库能够非常方便地建立自己的应用程序或者将Modbus通信协议嵌入单体设备libmodbus开发库与应用程序的基本关系如图6-4所示。
图6-4应用程序与libmodbus的关系:

在对libmodbus的接口及代码框架简单了解之后,不妨再深入细节一探究竟,看看libmodbus都实现了哪些基础功能,以及源代码中对Modbus各功能码和消息顿是如何包装的。具体内容请参看下一章。
二、libmodbus源代码解析
libmodbus作为一个优秀且免费开源的跨平台支持RTU和TCP模式的Modbus开发库,非常值得大家借鉴和学习。本章对libmodbus源代码进行阅读和分析。
2.1 核心函数
以Modbus RTU协议为例,主设备、从设备初始化后:
- 主设备就可以启动请求,即“发送消息”给从设备
- 从设备接收到请求后构造数据,启动响应即“发送回复”
- 主机收到响应后,会“检查响应”
如下图所示:

分析“libmodbus-3.1.10\tests\unit-test-client.c”、“libmodbus-3.1.10\tests\unit-test-server.c”,可以得到下面核心函数的使用过程:

在主设备(Client)中流程如下:

下面有写数据函数,一路进去解析如下:



在从设备(Server)中流程如下:





2.2 框架分析与数据结构
站在APP开发的角度来说,使用上一节里介绍的libmodbus函数即可。但是,数据的传输必定涉及到底层数据传输。所以,从数据的收发过程,可以把使用libmodbus的源码分为3层:
- APP:它知道要做什么,主设备要读写哪些寄存,从设备提供、接收什么数据
- Modbus核心层:向上提供接口函数,向下调用底层代码构造数据包并发送、接收数据包并解析
- 后端(数据传输):进行硬件相关的数据封包与发送、接收与解包

对于核心层、后端,抽象出了如下结构体:

核心层modbus_t结构体的成员含义如下:
| 成员 | 含义 |
|---|---|
| int slave; | 从站设备地址 |
| int s; | RTU下是串口句柄,TCP下是Socket |
| int debug; | 是否启动Debug模式(打印调试信息) |
| int error_recovery; | 错误恢复模式:MODBUS_ERROR_RECOVERY_NONE:由APP处理错误MODBUS_ERROR_RECOVERY_LINK:如果有连接错误,则重连MODBUS_ERROR_RECOVERY_PROTOCOL:如果数据不符合协议要求,则清空所有数据 |
| int quirks; | 一些奇怪的功能,比如:MODBUS_QUIRK_MAX_SLAVE:从站地址最大值可以到达255MODBUS_QUIRK_REPLY_TO_BROADCAST:回应广播包 |
| struct timeval response_timeout; | 等待回应的超时时间,默认是0.5S |
| struct timeval byte_timeout; | 接收一个字节的超时时间,默认是0.5S |
| struct timeval indication_timeout; | 等待请求的超时时间 |
| const modbus_backend_t *backend; | 硬件传输层的结构体 |
| void *backend_data; | 硬件传输层的私有数据 |
后端modbus_backend_t结构体的成员含义如下:
| 成员 | 含义 |
|---|---|
| unsigned int backend_type; | 后端类型,是RTU还是TCP |
| unsigned int header_length; | 头部长度,比如RTU数据包前面需要有1字节的设备地址,头部长度就是1 |
| unsigned int checksum_length; | 校验码长度,RTU的校验码是2字节 |
| unsigned int max_adu_length; | ADU(数据包)最大长度 |
| set_slave | 设置从站地址 |
| build_request_basis | 设置RTU请求包的基本数据,这些数据的格式是一样的,比如req[0]是从设备地址,req[1]是功能码,req[2]和req[3]是寄存器地址,req[4]和req[5]是寄存器数量 |
| build_response_basis | 设置RTU回应包的基本数据,这些数据的格式是一样的,比如req[0]是从设备地址,req[1]是功能码 |
| prepare_response_tid | 生产传输标识TID,在TCP中使用 |
| send_msg_pre | 发送消息前的准备工作,对于RTU是填充CRC检验码,对于TCP是填充头部的Length |
| send | 发送数据包 |
| receive | 接收数据包 |
| recv | 接收原始数据,receive会调用recv得到原始数据然后解析出数据包 |
| check_integrity | 检查数据包的完整性 |
| pre_check_confirmation | 检查响应数据包是否有效时,先执行pre_check_confirmation做一些简单的检查 |
| connect | 硬件相关的连接,对于RTU就是打开串口、设置串口波特率等;对于TCP则是连接对端 |
| is_connected | 判断是否已经连接 |
| close | 关闭连接 |
| flush | 清空接收到的、未处理的数据 |
| select | 阻塞一段时间以等待数据 |
| free | 释放分配的modbus_t等结构体 |
2.3 情景分析
2.3.1 初始化
在 client 的 main.c 主函数中可以看到 modbus_new_rtu 函数,详细如下:

进入到 modbus_new_rtu 函数内部,分析如下:


对于设置后端详细数据如下:

在 client.c 中设置需要访问的从设备地址,如下:

进入到 modbus_set_slave 函数中,可以看到调用到前面我们强调的 backend 中的一些参数:

进入到 backend 结构体中可以找到该参数:

进入到该参数函数内部,详细如下:

modbus 结构体参数详细如下:

主设备要想去访问从设备,通过串口进行收发数据,在主设备中为串口创建了一个 modbus_t 结构体,并且我们设置了其中的 slave 参数,设置完之后一开始输入的宏 SERVER_ID 就等于 salve 参数,即为主设备要去访问的从设备地址。
主设备知道了从设备的地址,接下来的操作就是连接从设备,如下:

进入到 modbus_connect 函数内部,详细如下:

可见还是调用到后端中的 connect 函数,详细如下:

进入到 conne 函数内部,打开了串口,并且设置参数,如下(这里截图了主要部分):

以“modbus_write_bits”函数(写多个寄存器)为例,分析下图的执行流程:

2.3.2 主设备发送请求

在上面的 modbus_write_bits 函数中,构造基础请求包:

这里的 byte_count 计数含义如下:这里意思是要写入的数据数量(字节),比如我们想写入9个位寄存器,有公式可得 9/8 = 1、(9%8 = 1) ? 1:0 = 1,两者相加则等于 2 ,所以这里需要发送两个字节,因为一个字节表示八位数据,这里要写入9个位寄存器就只能发送两个字节。
构造基础请求包调用的是后端 backend 结构体中的函数,如下:

函数内部详细如上,这里我们可以观察前面的写多个线圈的函数内部进行比较,如下:


可见数据能够进行一一对应。这里的构造基础信息就是帮助主设备构造好从设备地址、功能码、起始地址以及寄存器数。(这里有个小细节:最前面是构造请求包,但是它下面有条计算字节数的公式,通过计算我们得知 byte_count 为2,成功对应上写多个线圈的字节数,同时字节数对应 req[6],所以这里 req[6] = 2)

这里需要注意:modbus_write_bits 函数的src 传入的是一个字节表示一个位,用一个位来表示寄存器的数值,构造该请求包时需要把一个字节转换成一个位。

2.3.3 从设备接收请求
进入到 server.c 中,找到 main.c,对其中接收数据函数进行分析,其初始化与主机发送请求类似:

进入 modbus_receive 函数内部,可以看到其调用的是 backend 结构体中的 receive 函数:

找到 backend 结构体,并进入 _modbus_rtu_receive 函数内部:

不难发现,函数内部调用的是 backend 结构体中的 _modbus_receive_msg 函数,同时此函数对应了主设备中的 _modbus_receive_msg 函数,但是两者是有区别的,两者的区别在于第三个参数,如下:

对于主机调用 _modbus_receive_msg 函数是接收从机答复,对于从机调用 _modbus_receive_msg 函数是接收主机发送的请求。
一、等待数据:调用 select 函数判断是否有数据,如果返回值不等于-1则说明等待到了数据但是还没有去读数据,如果返回值等于1则说明没有等待到数据,同时第三个参数是时间参数,可以设置一个超时时间。

二、读取原始数据:如果返回值不等于-1说明等待到了数据,那么就调用 backend 结构体中的 recv 函数来读取原始数据。

三、分阶段读取数据:接收到的字符数量在 rc 中记录下来,将上一次已经读取的字符减掉接收到的字符数量赋给 length_to_read,如果 length_to_read = 0,则说明读取完毕。即为上一阶段的数据是否已经接收完毕。如果已经接收完毕,下面的函数会继续计算下一个阶段要读取的数据长度。先计算下一阶段的数据长度(length_to_read),再循环读。

一、二、三为一个完整的循环,会读取到以一个完整的数据包。
四、检查数据包的完整性。



想去读一个数据包,一开始要先知道读取的字节长度,第一次要读取的数据为头部长度+1,第一个状态要去读取 _STEP_FUNCTION 这个功能(即功能码),所以在这里是要读取到功能码,功能码在第二个字节处,所以 length_to_read = 2,则 header_length = 1。

与(一)一样,在下面的 while 循环中,会去读取两个字节,读到两个字节之后(从设备地址和功能码)进行判断后面需要读取多少个字节,进入到compute_meta_length_after_function函数内部,发现如果是写入多个线圈则需要读取5个字节,刚好对应上功能码后面的起始地址高位到字节数。


确定了后面要读取5个字节(原始数据,对应 _STEP_META),就会再次进行循环,等待5个数据,当读取到五个数据之后会进入 compute_data_length_after_meta 函数,由前面可知 header_length = 1,所以这里的 length = msg[6],刚好是前面的从设备地址到字节数总共6个字节。



最后一步是校验码,对应 _STEP_DATA,前面总共读取了7个字节,对应到msg[6],所以这里需要再读取msg[6]+2个字节,刚好对应上校验位(包括前面的字节数)。所以在这里确定了读数据的字节数,会再次进行循环,等待数据全部读取完毕,数据读取完毕则会检查数据完整性。

这里调用的是 backend 结构体中的函数,进入函数内部可以知道:从设备进行判断,如果是发给从设备的,会进行判断,如果不是发给从设备,则返回0。同时会去检查校验码,会使用收到i的数据(从设备地址到变更数据低位)算出一个校验码,与接收到的校验码进行对比,如果两者相同则表示接收到正确的数据。

补充:对于前面的 select 函数会判断是否有数据,同时会设置一个超时时间,对于这个超时时间我们可以进行了解:
从机调用 modbus_receive 函数 是不知道主机什么时候将数据发送给从机,那么在该函数中到底愿意等待多久呢,这个时间是如何确定的,从机等待主机发送请求,在 _modbus_receive_msg 函数的第三个参数 msg_type 是 MSG_INDICATION,表示等待的数据包是主机发送的,如果想等待主机发送过来的请求,这个超时时间就是这条总线中的 indication_timeout(从机等待主机请求的时间),并且这个时间是可以去设置的,如果将该超时时间设置的非常大,那么在接下来的循环中等待第一个数据时会等待很久,类似于 freertos 中的阻塞,不会浪费 CPU 资源,调用的是查询方式。这里如果是主教调用该函数,则这个超时时间就是主机愿意等待从机回应的超时时间。


这里主要是接收主机发送请求(从设备地址和功能码)可以将超时时间设置很大,并且会在一个循环中,会一直等待请求,如果是执行接收后续数据(起始地址、寄存器数和数据),可以将超时时间设置为只愿意等待一个字节的时间。

2.3.4 从设备回应

创建一个 modbus 设备时,可以去分配下面几个寄存器的内存。

在 server.c 中的 modbus_mapping_new_start_address 函数会创建一个 mapping 结构体,这个结构体就是用来描述一个从机的寄存器。


想使用上面的数组,只需要去调用 modbus_reply 函数,当从机接收到主机发送的请求,调用该函数会根据请求来写或读寄存器。



当接收到主设备发送的消息之后,从设备调用 modbus_reply 函数会先去解析数据包(即主机的请求),接下来就是读或写 mapping 结构体中的数组,最后就是发出回应。比如现在主机要读取单个线圈,从机接收到请求之后调用 modbus_reply 函数就会去读 mapping 结构体中的读单个线圈数组,将其中每一位的数值找到,将数值构造成一个回应的数据包并发送给主机;若主机要写单个线圈,从机接收到请求之后调用 modbus_reply 函数把请求数据包中的数据挑出来,写入到 mapping 结构体中的某个读单个线圈数组,写完之后需要发送一个回应给主机表示已经写入完毕。

在读取多个线圈中,由一开始可知 offest = 1,所以第一行代码 offest + 3 对应的位置就是寄存器数的高位,offest + 4 对应的是寄存器数的低位;第二行代码以此类推,得到字节数;第三行中的 address - mb_mapping->start_bits(起始位)主要是做了下标的转换,例如在构造 mapping 结构体时,buf 的第0项对应了 start_bits 的第100个寄存器,如果此时主机想去访问第101个寄存器,则需要进行如下操作:101 - 100 = 1,此时的 1 就是 buf[1],对应了第101个寄存器。

进行某些异常判断:若要写入的寄存器数小于1则为异常;写入的寄存器数超过写入的最大值则为异常;写入位寄存器后后续提供的数据字节数不足则为异常。

这个函数主要是将主机发送来的请求中含有的数据挑出来,写到 mb_mapping->tab_bits 数组中,完成了数据的更新。


该函数主要是构建基础回应包,进入函数内部可以看到,主要是设置了从机的设备地址和功能码,接着就将后面的四位数据复制下来,也就是起始地址高低位、寄存器数高低。


最后就是发送数据给主机,主要就是构造校验码(CRC),接着就是写串口,将数据写入串口发送给主机,完成回应。



在上面我们用的都是 modbus_reply 函数,我们也可以通过自己构造数据包,调用 modbus_send_raw_request 函数进行回应。

进入到函数内部,他会构造一个基础回应包,该回应包会含有从机地址以及功能码,接着拷贝后面的原始数据(数据域字节数、数据高低位),拷贝进前面构造的req[MAX_MESSAGE_LENGTH] 数组,最后发送消息,在发送消息函数中会去构造两个字节的校验码,接着写串口,将数据发送给主机。
2.4 常用接口函数
下面分析 libmodbus开发库提供的所有接口API函数。其主要对象文括 modbus.h 和 modbus.c ,接口函数大致可分为3类,以下分别进行介绍。
2.4.1 各类辅助接口函数
MODBUS_API int modbus_set_slave(modbus t * ctx,int slave)
此函数的功能是设置从站地址,但是由于传输方式不同而意义稍有不同。
- RTU模式 :
如果 libmodbus应用于 主站设备端,则相当于定义 远端设备ID ;如果libmodbus应用于从站设备端 ,则相当于定义 自身设备 ID ;在 RTU 模式下参数 slave 取值范围为 0~247 ,其中 0(MODBUS_BROADCAST_ADDRESS) 为广播地址。
- TCP模式:
通常,TCP 模式下此函数不需要使用。在某些特殊场合,例如串行 Modbus设备转换为 TCP模式传输的情况下,此函数才被使用。此种情况下,参数 slave取值范围为 0~247 ,0 为广播地址;如果不进行设置,则 TCP 模式下采用默认值 MODBUS TCP SLAVE(OXFF) 。
下面的代码以 RTU模式、主设备(MASTER)端为例:
modbus_t * ctx;
ctx=modbus_new_rtu("COM4",115200,'N',8,1);
if (ctx ==NULL)
{
fprintf(stderr,"Unable to create the libmodbus context\n");
return -1;
}
rc =modbus_set_slave(ctx,YOUR DEVICE ID);
if (rc==-1)
{
fprintf(stderr,"Invalid slave ID\n");
modbus free(ctx);
return -1;
}
if (modbus connect(ctx)==-1)
{
fprintf(stderr,"Connection failed:sn",modbus strerror(errno));
modbus free(ctx);
return -1;
}
MODBUS_APIintmodbus_set_error_recovery(modbus_t*ctx,modbus_error_recovery_mode error_recovery):
此函数用于在连接失败或者传输异常的情况下,设置错误恢复模式。有 3种错误恢复模式可选。
typedef enum
{
MODBUS_ERROR_RECOVERY_NONE =0, //不恢复
MODBUS_ERROR_RECOVERY_LINK =(1<<1), //链路层恢复
MODBUS_ERROR_RECOVERY_PROTOCOL =(1<<2) //协议层恢复
}modbus error recovery mode;
默认情况下,设置为 MODBUS_ERROR_RECOVERY_NONE ,由应用程序自身处理错误;若设置为 MODBUS_ERROR_RECOVERY_LINK ,则经过一段延时 libmodbus 内部自动尝试进行断开/连接;若设置为 MODBUS_ERROR_RECOVERY_PROTOCOL ,则在传输数据 CRC 错误或功能码错误的情况下,传输会进入延时状态,同时数据直接被清除。在 SLAVE/SERVER 端,不推荐使用此函数。
基本用法举例:
modbus_set_error_recovery(ctx,MODBUS_ERROR_RECOVERY_LINK|MODBUS_ERROR_RECOVERY_PROTOCOL);
MODBUS_API int modbus_set_socket(modbus t * ctx,int s)
此函数设置当前 SOCKET 或串口句柄要用于多客户端连接到单一服务器的场合。简单用法举例如下,后续介绍函数 modbus_tcp_listen() 时将会进一步介绍相关用法。
#define NB_CONNECTION 5
modbus_t * ctx;
ctx=modbus_new_tcp("127.0.0.1", 1502)
server_socket = modbus_tcp_listen(ctx,NB_CONNECTION);
FD_ZERO(&rdset);
FD_SET(server_socket,&rdset);
/* ... */
if (FD_ISSET(master_socket,&rdset))
{
modbus_set_socket(ctx,master_socket);
rc =modbus_receive(ctx,query);
if(rc!=-1)
{
modbus_reply(ctx,query, rc,mb_mapping);
}
}
MODBUS_API int modbus_get_response_timeout (modbus_t * ctx, uint32_t * to_sec, uint32_t * to_usec);
MODBUS_API int modbus_set_response_timeout (modbus_t * ctx, uint32_t * to_sec, uint32_t * to_usec);
用于获取或设置响应超时,注意时间单位分别是秒和微秒。
MODBUS_API int modbus_get_byte_timeout (modbus_t * ctx, uint32_t * to_sec,uint32_t * to_usec);
MODBUS_API int modbus_set_byte_timeout (modbus_t * ctx, uint32_t * to_sec,uint32_t * to_usec);
用于获取或设置连续字节之间的超时时间,注意时间单位分别是秒和微秒。
MODBUS_API intmodbus_get_header_length (modbus_t * ctx);
获取报文头长度。
MODBUS_API int modbus_connect (modbus_t * ctx);
此函数用于主站设备与从站设备建立连接。
在 RTU 模式下,它实质调用了文件 modbus_rtu.c 中的函数 static int modbus_rtu_connect (modbus_t * ctx) ;在此函数中进行了串口波特率校验位、数据位、停止位等的设置。
在 TCP 模式下,modbus_connect() 调用了文件 modbus_tcp.c 中的函数 static int_modbus_tcp_connect (modbus_t * ctx ) ;在函数 _modbus_tcp_connect() 中,对 TCP/IP 各参数进行了设置和连接。
MODBUS_API void modbus_close (modbus_t * ctx);
关闭 Modbus 连接。在应用程序结束之前,一定记得调用此函数关闭连接在 RTU 模式下,实质是调用函数 _modbus_rtu_close(modbus_t * ctx) 关闭串口句柄;在 TCP 模式下,实质是调用函数 _modbus_tcp_close(modbust * ctx) 关闭 Socket 句柄。
MODBUS_API void modbus_free (modbus_t * ctx);
释放结构体 modbus_t 占用的内存。在应用程序结束之前,一定记得调用此函数
MODBUS_API int modbus_set_debug (modbust * ctx, int flag);
此函数用于是否设置为DEBUG模式。
若参数 flag 设置为TRUE,则进入 DEBUG模式。若设置为FALSE,则切换为非 DEBUG模式。在 DEBUG模式下所有通信数据将按十六进制方式显示在屏幕上,以方便调试。
MODBUS_API const char * modbus_strerror (int errnum);
此函数用于获取当前错误字符串。
2.4.2 各类Modbus功能接口函数
MODBUS_API int modbus_read_bits (modbus t * ctx, int addr, int nb, uint8_t * dest);
此函数对应于功能码 01(0x01) 读取线圈/离散量输出状态(Read Coil Status/DOs),其中,所读取的值存放于参数 uint8_t * dest 指向的数组空间因此 dest 指向的空间必须足够大,其大小至少为 nb * sizeof(uint8_t) 个字节。
用法举例:
#define SERVER ID 1
#define ADDRESS START 0
#define ADDRESS END 99
modbus_t * ctx;
uint8_t * tab_rp_bits;
int rc;
int nb;
ctx=modbus_new_tcp("127.0.0.1",502);
modbus_set_debug(ctx,TRUE);
if (modbus_connect(ctx)==-1)
{
fprintf(stderr,"Connection failed:%s\n", modbus_strerror(errno));
modbus free(ctx);
return -1;
}
//申请存储空间并初始化
int nb = ADDRESS_END - ADDRESS_START;
tab_rp_bits = (uint8_t * ) malloc (nb * sizeof(uint8_t));
memset(tab_rp_bits, 0, nb * sizeof(uint8_t));
//读取一个线圈
int addr =1;
rc =modbus_read_bits(ctx,addr,1,tab_rp_bits);
if (rc !=1)
{
printf("ERROR modbus_read_bits_single (%d)\n", rc);
printf("address =%d\n", addr);
}
//读取多个线圈
rc =modbus_read_bits(ctx,addr,nb,tab_rp_bits);
if (rc !=nb)
{
printf("ERROR modbus_read_bits\n");
printf("Address =%d,nb =%d\n", addr, nb);
}
//释放空间关闭连接
free(tab_rp_bits);
modbus_close(ctx);
modbus_free(ctx);
MODBUS_API int modbus_read_input_bits (modbus_t * ctx, int addr, int nb,uint8_t * dest);
此函数对应于功能码 02(0x02) 读取离散量输入值(Read Input Status/DIs),各参数的意义与用法,类似于函数 modbus_read_bits() 。
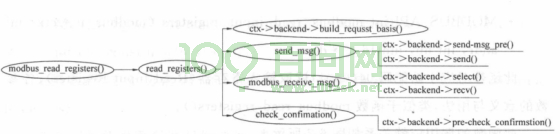
MODBUS_API int modbus_read_registers (modbus_t * ctx, int addr, int nb,uint16_t * dest);
此函数对应于功能码 03(0x03) 读取保持寄存器(Read Holding Register),其中,所读取的值存放于参数 uint16_t * dest 指向的数组空间因此 dest 指向的空间必须足够大,其大小至少为 nb * sizeof(uint16_t) 个字节。
当读取成功后,返回值为读取的寄存器个数;若读取失败,则返回-1。此函数调用依赖关系如下图6-5所示。
用法举例:
modbust * ctx;
uint16_t tab_reg[64];
int rc;
int i;
ctx=modbus_new_tcp("127.0.0.1",502);
if (modbusconnect(ctx)==-1)
{
fprintf(stderr,"Connection failed:%s\n", modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
//从地址0开始连续读取10个
rc =modbus_read_registers(ctx,0,10,tab_reg);
if (rc ==-1)
{
fprintf(stderr,"%s\n",modbus_strerror(errno));
return -1;
}
for (i=0;i<rc;i++)
{
printf("reg[%d]=%d(0x%X)\n",i,tab_reg[i],tab_reg[i]);
}
modbus_close(ctx);
modbus_free(ctx);
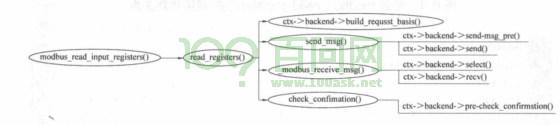
MODBUS_API int modbus_read_input_registers (modbus_t * ctx,int addr, int nb, uint16_t * dest );
此函数对应于功能码 04(0x04) 读取输人寄存器(Read Iput Register),各参数的意义与用法,类似于函数 modbus_read_registers() 。
此函数的调用依赖关系如下图 6-6 所示。
图6-6函数 modbus_read input_registers()的调用依赖关系:
MODBUS_API int modbus_write_bit (modbus_t * ctx, int coil_addr, int status):
该函数对应于功能码 05(0x05) 写单个线圈或单个离散输出(Force SingleCoil)。其中参数 coil_addr 代表线圈地址;参数 status 代表写值取值只能是TRUE(1)或 FALSE(0) 。
MODBUS_API int modbus_write_register (modbus_t * ctx,int reg_addr, int value):
该函数对应于功能码 06(0x06) 写单个保持寄存器(Preset Single Register)。
MODBUS_API int modbus_write_bits (modbus_t * ctx, int addr, int nb, const uint8_t * data):
该函数对应于功能码 15(0x0F) 写多个线圈(Force Multiple Coils)
参数 addr 代表寄存器起始地址,参数 nb 表示线圈个数,而参数 const uint8_t * data 表示待写入的数据块。一般情况下,可以使用数组存储写入数据,数组的各元素取值范围只能是 TRUE(1)或 FALSE(0) 。
MODBUS_API int modbus_write_registers (modbus_t * ctx, int addr, int nb, const uint16_t * data):
该函数对应于功能码 16(0x10) 写多个保持存器(Preset MultipleRegisters)
参数 addr 代表寄存器起始地址,参数 nb 表示存器的个数而参数 const uint16_t * data 表示待写人的数据块。一般情况下,可以使用数组存储写入数据数组的各元素取值范围是 0~0xFFFF 即数据类型 uint16_t 的取值范围。
MODBUS_API int modbus_mask_registers (modbus_t * ctx, int addr, uint16_t and_mask, uint16_t or_mask ):
modbus_mask_write_register() 函数应使用以下算法修改远程设备地址“addr”处的保持寄存器的值:
新值 = (current value AND ‘and’) OR (‘or’ AND (NOT ‘and’)) 。
该功能使用 Modbus 功能代码 0x16(掩码单个寄存器)。
MODBUS_API int modbus_write_and_read_registers (mobus_t * ctx ,
int writer_addr,
int writer_nb,
const uint16_t * src,
int read_addr,
int read_nb,
uint16_t * dest);
modbus_write_and_read_registers() 函数应将 write_nb 保持寄存器的内容从数组 “src” 写入远程设备的地址 write_addr ,然后将 read_nb 保持寄存器的内容读取到远程设备的地址 read_addr 。读取结果作为字值(16 位)存储在 dest 数组中。
必须注意分配足够的内存来存储结果 dest (至少 nb * sizeof(uint16_t))。该功能使用 Modbus 功能代码 0x17(写/读寄存器)。
MODBUS_API int modbus_report_slave_id (modbus_t * ctx, int max_dest, uint8_t * dest):
该函数对应于功能码 17(0x11) 报告从站ID。参数 max_dest 代表最大的存储空间,参数 dest 用于存储返回数据。返回数据可以包括如下内容:从站 ID状态值(0x00= OFF状态, 0xFF=ON状态) 以及其他附加信息,具体的各参数意义由开发者指定。
用法举例:
uint8_t tab_bytes[MODBUS_MAX_PDU_LENGTH];
...
rc =modbus_report_slave_id(ctx, MODBUS_MAX_PDU_LENGTH, tab_bytes);
if (rc>1)
{
printf("Run Status Indicator: %s\n",tab_bytes[1] ?"ON":"OFF");
}
2.4.3 数据处理的相关函数或宏定义
在libmodbus开发库中,为了方便数据处理在 modbus.h 文件中定义了一系列数据处理宏。
例如获取数据的高低字节序宏定义:
#define MODBUS_GET_HIGH_BYTE (data) (((data) >>8) & 0xFF)
#define MODBUS_GET_LOW_BYTE (data) ((data) & 0xFF)
对于浮点数等多字节数据而言,由于存在字节序与大小端处理等的问题,所以辅助定义了一些特殊函数:
MODBUS_API float modbus_get_float (const uint16_t * src);
MODBUS_API float modbus_get_float_abcd (const uint16_t * src);
MODBUS_API float modbus_get_float_dcba (const uint16_t * src);
MODBUS_API float modbus_get_float_badc (const uint16_t * src);
MODBUS_API float modbus_get_float_cdab (const uint16_t * src);
MODBUS_API void modbus_set_float (float f,uint16_t * dest);
MODBUS_API void modbus_set_float_abcd (float f,uint16_t * dest);
MODBUS_API void modbus_set_float_dcba (float f,uint16_t * dest);
MODBUS_API void modbus_set_float_badc (float f,uint16_t * dest);
MODBUS_API void modbus_set_float_cdab (float f,uint16_t * dest);
当然,可以参照 float 类型的处理方法,继续定义其他多字节类型的数据例如int32_t、uint32_t、 int64_t、uint64_t 以及 double 类型的读写函数。
2.5 RTU/TCP关联接口函数
在文件 modbus.h 的最后位置,有如下语句
#include “modbus-tcp.h”
#include “modbus-rtu.h”
可以发现,除了 modbus.h 包含的接口函数之外,modbus-rtu.h 和 modbus-tcp.h 也包含了必要的接口函数。
2.5.1 RTU模式关联函数
MODBUS_API modbus_t * modbus_new_rtu (const char * device, int baud, char parity, int data_bit, int stop_bit):
此函数的功能是创建一个 RTU 类型的 modbus_t 结构体。参数 const char * device 代表串口字符串,在 Windows 操作系统下形态如 “COMx” ,有一点需要注意的是,对于串口1串口9来说,,传递 “COM1”“COM9” 可以 成功 ,但是如果操作对象为 COM10及以上端口 ,则会出现 错误。
产生这种奇怪现象的原因是:微软预定义的标准设备中含有 “COM1”~“COM9” 。所以,“COM1”~“COM9” 作为文件名传递给函数时操作系统会自动地将之解析为相应的设备。但对于 COM10 及以上的串口,“COM10” 之类的文件名系统只视之为 一般意义上的文件,而非串行设备。为了增加对 COM10 及以上串行端口的支持,微软规定,如果要访问这样的设备,应使用这样的文件名(以COM10 为例):\\.\ COM10。
所以,使用时在代码中可以如此定义:.
const char * device = “\\.\COM10”;
在Linux操作系统下可以使用”/dev/ttySo”或”/dev/ttyUSB0”等形式的字符串来表示。而参数 int baud 表示串口波特率的设置值,例如:9600、19200、57600、115200等。
参数char parity 表示奇偶校验位,取值范围:
- ‘N’:无奇偶校验;
- ‘E’:偶校验;
- ‘O’:奇校验。
参数 int data_bit 表示数据位的长度,取值范围为 5、6、7和8。
参数int stop_bit 表示停止位长度,取值范围为1或2。
用法举例:
modbus t *ctx;
ctx=modbus_new_rtu("\\\\.\\COM10",115200,'N',8,1);
if (ctx ==NULL)
{
fprintf(stderr,"Unable to create the libmodbus context\n");
return -1;
}
modbus_set_slave(ctx,SLAVE_DEVICE_ID);
if (modbus connect(ctx)==-1)
{
fprintf(stderr,"Connection failed:%s\n",modbus_strerror(errno));
modbus_free(ctx);
return -1;
}
MODBUS_API int modbus_rtu_set_serial_mode (modbus_t * ctx, int mode):
该函数用于设置串口为 MODBUS RTU RS232或MODBUSRTU_RS485模式,此函数只适用于 Linux 操作系统下。
MODBUS_API int modbus_rtu_set_rts (modbus_t * ctx, int mode)。
MODBUS_API int modbus_rtu_set_custom_rts (modbus_t * ctx, void ( * set_rts) (modbus_t * ctx, int on))。
MODBUS_API int modbus_rtu_set_rts_delay (modbus_t * ctx, int us)。
以上函数只适用于 Linux 操作系统下,RTS 即Request ToSend 的缩写,具体的意义可通过网络搜索,一般情况下,此类函数可忽略。
2.5.2 TCP模式关联函数
MODBUS_API modbus_t * modbus_new_tcp (const char *ip_address, int port)。
此函数的功能是创建一个TCP/IPv4 类型的modbus_t 结构体。
参数 const char * ip_address 为IP地址,port 表示远端设备的端口号。
MODBUS_API int modbus_tcp_listen (modbus_t * ctx, int nb_connection)。
此函数创建并监听一个 TCP/IPv4 上的套接字。
参数int nb_connection 代表最大的监听数量,在调用此函数之前,必须首先调用modbus_new_tcp() 创建modbus_t结构体。
MODBUS_API int modbus_tcp_accept (modbus_t * ctx,int * s)。
此函数接收一个 TCP/IPv4 类型的连接请求,如果成功将进入数据接收状态。
三、libmodbus移植与使用
3.1 移植方法
以串口为例,libmodbus支持了windows系统、Linux系统。如果要在Freertos或者裸机上使用libmodbus,需要移植libmodbus里操作硬件的代码。
根据下图的层次,要移植libmodbus的“后端”,就是构造自己的modbus_backend_t结构体:

后端modbus_backend_t结构体的成员含义如下:
| 成员 | 含义 |
|---|---|
| unsigned int backend_type; | 后端类型,是RTU还是TCP |
| unsigned int header_length; | 头部长度,比如RTU数据包前面需要有1字节的设备地址,头部长度就是1 |
| unsigned int checksum_length; | 校验码长度,RTU的校验码是2字节 |
| unsigned int max_adu_length; | ADU(数据包)最大长度 |
| set_slave | 设置从站地址 |
| build_request_basis | 设置RTU请求包的基本数据,这些数据的格式是一样的,比如req[0]是从设备地址,req[1]是功能码,req[2]和req[3]是寄存器地址,req[4]和req[5]是寄存器数量 |
| build_response_basis | 设置RTU回应包的基本数据,这些数据的格式是一样的,比如req[0]是从设备地址,req[1]是功能码 |
| prepare_response_tid | 生产传输标识TID,在TCP中使用 |
| send_msg_pre | 发送消息前的准备工作,对于RTU是填充CRC检验码,对于TCP是填充头部的Length |
| send | 发送数据包 |
| receive | 接收数据包 |
| recv | 接收原始数据,receive会调用recv得到原始数据然后解析出数据包 |
| check_integrity | 检查数据包的完整性 |
| pre_check_confirmation | 检查响应数据包是否有效时,先执行pre_check_confirmation做一些简单的检查 |
| connect | 硬件相关的连接,对于RTU就是打开串口、设置串口波特率等;对于TCP则是连接对端 |
| is_connected | 判断是否已经连接 |
| close | 关闭连接 |
| flush | 清空接收到的、未处理的数据 |
| select | 阻塞一段时间以等待数据 |
| free | 释放分配的modbus_t等结构体 |
打开 backend 结构体所在 .c 文件的目录位置,复制该文件并修改名字为 modbus-st-rtu.c:

将其添加到 source insight 工程中,修改其中代码。
我们是要在 Freertos 或者裸机上使用 libmodbus ,所以不会用到 linux 相关代码,将其删除:

将与 win32 相关代码删除:











3.2 使用USB串口作为后端
基于这2个程序:


第1步:合并上述2个源码,并修改到能编译成功(但是libmodbus里对USB串口的操作),结果放在如下目录:

第2步,继续修改上图的代码,实现USB串口作为后端,得到以下代码:

USB串口的操作函数:
/* 发送数据 */
int ux_device_cdc_acm_send(uint8_t *datas, uint32_t len, uint32_t timeout);
/* 接收数据 */
int ux_device_cdc_acm_getchar(uint8_t *pData, uint32_t timeout);
3.3 libmodbus从机实验(USB串口)
本节源码为:

参考“libmodbus-3.1.10\tests\unit-test-server.c”,把开发板当做从机,使用PC上Modbus Poll软件读写开发板:控制LED。
要点:
① printf、fprintf、vfprintf都不能使用,改成空的宏
② p_tv 不能成为空指针
仿照下图流程编写代码:

app_freertos.c
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os2.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "draw.h"
#include "stdio.h"
#include "draw.h"
#include "ux_api.h"
#include "modbus.h"
#include "errno.h"
static void LibmodbusServerTask( void *pvParameters )
{
uint8_t *query;
modbus_t *ctx; //创建一个modbus结构体
int rc;
modbus_mapping_t *mb_mapping;
/* modbus_new_st_rtu 函数需要在 modbus.h 中进行声明 */
ctx = modbus_new_st_rtu("usb", 115200, 'N', 8, 1); //设置串口相关参数
modbus_set_slave(ctx, 1); //设置地址为1
query = pvPortMalloc(MODBUS_RTU_MAX_ADU_LENGTH); //分配空间,后续会调用modbus_receive来获得主机发过来请求,query相当于是一个查询报文
/*
mb_mapping = modbus_mapping_new_start_address(UT_BITS_ADDRESS,
UT_BITS_NB,
UT_INPUT_BITS_ADDRESS,
UT_INPUT_BITS_NB,
UT_REGISTERS_ADDRESS,
UT_REGISTERS_NB_MAX,
UT_INPUT_REGISTERS_ADDRESS,
UT_INPUT_REGISTERS_NB);
*/
mb_mapping = modbus_mapping_new_start_address(0, //可读可写bit起始地址
10, //个数
0, //只读bit起始地址
10, //个数
0, //可读可写寄存器起始地址
10, //个数
0, //只读寄存器起始地址
10); //个数
memset(mb_mapping->tab_bits, 0, mb_mapping->nb_bits); //内存块初始化函数(可读可写字节) 将tab_bits中的nb_bits个字节设置为0
memset(mb_mapping->tab_registers, 0x55, mb_mapping->nb_registers * 2); //内存块初始化函数(可读可写寄存器,注意每个寄存器对应两个字节,所以是0x5555,需要*2,对应十进制是21845) 将tab_registers中的nb_registers * 2个字节设置为0x55
rc = modbus_connect(ctx);
if (rc == -1) {
//fprintf(stderr, "Unable to connect %s\n", modbus_strerror(errno));
modbus_free(ctx);
vTaskDelete(NULL);
}
for (;;) {
do {
rc = modbus_receive(ctx, query); //调试时发现没现象 跳过去此函数的编写 找到modbus.c的387行
/* Filtered queries return 0 */
} while (rc == 0);
/* The connection is not closed on errors which require on reply such as
bad CRC in RTU. */
if (rc == -1 && errno != EMBBADCRC) {
/* Quit */
continue;
}
rc = modbus_reply(ctx, query, rc, mb_mapping);
if (rc == -1) {
//break;
}
if (mb_mapping->tab_bits[0])//tab_bits的第1位如果非0就点灯
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_SET);
}
modbus_mapping_free(mb_mapping);
vPortFree(query);
/* For RTU */
modbus_close(ctx);
modbus_free(ctx);
vTaskDelete(NULL); //这里原本是return 0;但作为任务函数不能直接返回,结束后需要自杀
}
xTaskCreate(
LibmodbusServerTask,
"LibmodbusServerTask",
200,
NULL,
osPriorityNormal,
NULL);
modbus.c
if (msg_type == MSG_INDICATION) {
/* Wait for a message, we don't know when the message will be
* received */
if (ctx->indication_timeout.tv_sec == 0 && ctx->indication_timeout.tv_usec == 0) {
/* By default, the indication timeout isn't set */
//p_tv = NULL;
tv.tv_sec = 0; //主要修改位置在此,尽管sec或usec为0,但不能让p_tv成为空指针
tv.tv_usec = 0;
p_tv = &tv;
} else {
/* Wait for an indication (name of a received request by a server, see schema)
*/
tv.tv_sec = ctx->indication_timeout.tv_sec;
tv.tv_usec = ctx->indication_timeout.tv_usec;
p_tv = &tv;
}
} else {
tv.tv_sec = ctx->response_timeout.tv_sec;
tv.tv_usec = ctx->response_timeout.tv_usec;
p_tv = &tv;
}
modbus.h
#define debug_printf(...)
#define debug_fprintf(...)
打开 Modbus Poll 软件,进行相关配置:

成功读取数据:

再开启另一个窗口,进行如下配置:


配置成功后如下,点击第一个数据进行改写,可以看到板子上的led出现现象:

3.4 libmodbus主机实验(USB串口)
本节源码为:

参考“libmodbus-3.1.10\tests\unit-test-client.c”,把开发板当做主机,去读写PC上Modbus Slave软件模拟的从机。
仿照下图流程编写代码

主机先读取寄存器1中的数据,读取完毕后将数据+1并写入到寄存器2,同时将新数据显示在lcd上。
app_freertos.c
static void LibmodbusClientTask( void *pvParameters )
{
modbus_t *ctx; //创建一个modbus结构体
int rc;
uint16_t val;
int nb = 1;
ctx = modbus_new_st_rtu("usb", 115200, 'N', 8, 1); //设置串口相关参数
modbus_set_slave(ctx, 1); //设置地址为1
rc = modbus_connect(ctx);
if (rc == -1) {
//fprintf(stderr, "Unable to connect %s\n", modbus_strerror(errno));
modbus_free(ctx);
vTaskDelete(NULL);
}
for (;;) {
/* read holding register 1 */
rc = modbus_read_registers(ctx, 1, 1, &val);
if(rc != nb)
continue;
/* display on led */
Draw_Number(0, 0, val, 0xffff00);
/* val++ */
val++;
/* write val to holding register 2 */
rc = modbus_write_registers(ctx, 2, 1, &val);
}
/* For RTU */
modbus_close(ctx);
modbus_free(ctx);
vTaskDelete(NULL);//这里原本是return 0;但作为任务函数不能直接返回,结束后需要自杀
}
#if 0
xTaskCreate(
LibmodbusServerTask,
"LibmodbusServerTask",
200,
NULL,
osPriorityNormal,
NULL);
#else
xTaskCreate(
LibmodbusClientTask,
"LibmodbusClientTask",
200,
NULL,
osPriorityNormal,
NULL);
#endif
打开 Modbus Slave 软件,进行相关配置:


3.5 使用板载串口作为后端
本节代码如下:

按照下图连线:调试、供电、两个485互连,使用CH1(左边的RS485接口)作为主设备,访问CH2(右边的RS485接口):

3.5.1 使用UART_Device
把UART2、UART4的发送、接收功能都补全了,并且构造了对应的UART_Device结构体,里面实现了初始化、发送、接收一个自己的的函数,如下:
把UART2、UART4封装为UART_Device的代码为:UART\uart_rtos_all_ok.7z。需要把它的代码移植到本节的工程里:
- 使用STM32CubeMX配置UART2、UART4:发送、接收都使用DMA
- 复制代码:Core\Src\usart.c、Drivers\Module_driver\uart_device.c/h
使用STM32CubeMX配置的过程如下:
- 使能DMA通道:

- 各个DMA通道的配置如下:

3.5.2 用作后端
把UART2、UART4用作libmodbus后端时,只需要修改这几个函数即可:

有两个UART_Device,调用哪个UART_Device?在使用“modbus_new_st_rtu”创建modbus_t时,根据传入的设备名在modbus_t结构体里记录对应的UART_Device。_modbus_rtu_connect、_modbus_rtu_send、_modbus_rtu_recv这三个函数,就可以直接调用modbus_t结构体里的UART_Device函数了。
移植代码时,以下部分代码需要注意,解释如下:




modbus_rtu_send 函数代码如下:
static ssize_t _modbus_rtu_send(modbus_t *ctx, const uint8_t *req, int req_length)
{
/* 使用usb/UART2/UART4的UART_Device来发送数据 */
/* 取出记录在ctx_rtu结构体中的dev来发送数据 */
modbus_rtu_t *ctx_rtu = ctx->backend_data;
struct UART_Device *pdev = ctx_rtu->dev;
if (0 == pdev->Send(pdev, (uint8_t *)req, req_length, TIMEROUT_SEND_MSG))
return req_length;
else
{
errno = EIO;
return -1;
}
return 0;
}
_modbus_rtu_recv 函数代码如下:
/* 使用usb/UART2/UART4的UART_Device来接收数据 */
modbus_rtu_t *ctx_rtu = ctx->backend_data;
struct UART_Device *pdev = ctx_rtu->dev;
if (0 == pdev->RecvByte(pdev, rsp, timeout))
return 1;
else
{
errno = EIO;
return -1;
}
接下来仿照原来UART2、UART4的多个函数结构体写一个USB结构体:
UART2、UART4结构体及相关函数如下(usart.c):
int UART2_GetData(struct UART_Device *pdev, uint8_t *pData, int timeout)
{
if (pdPASS == xQueueReceive(g_xUART2_RX_Queue, pData, timeout))
return 0;
else
return -1;
}
int UART2_Rx_Start(struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit)
{
if (!g_xUART2_RX_Queue)
{
g_xUART2_RX_Queue = xQueueCreate(200, 1);
g_UART2_TX_Semaphore = xSemaphoreCreateBinary( );
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, g_uart2_rx_buf, 100);
}
return 0;
}
int UART2_Send(struct UART_Device *pDev, uint8_t *datas, uint32_t len, int timeout)
{
HAL_UART_Transmit_DMA(&huart2, datas, len);
if (pdTRUE == xSemaphoreTake(g_UART2_TX_Semaphore, timeout))
return 0;
else
return -1;
}
int UART4_GetData(struct UART_Device *pDev, uint8_t *pData, int timeout)
{
if (pdPASS == xQueueReceive(g_xUART4_RX_Queue, pData, timeout))
return 0;
else
return -1;
}
int UART4_Rx_Start(struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit)
{
if (!g_xUART4_RX_Queue)
{
g_xUART4_RX_Queue = xQueueCreate(200, 1);
g_UART4_TX_Semaphore = xSemaphoreCreateBinary( );
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
return 0;
}
int UART4_Send(struct UART_Device *pDev, uint8_t *datas, uint32_t len, int timeout)
{
HAL_UART_Transmit_DMA(&huart4, datas, len);
if (pdTRUE == xSemaphoreTake(g_UART4_TX_Semaphore, timeout))
return 0;
else
return -1;
}
int UART2_Flush(struct UART_Device *pDev)
{
int cnt = 0;
uint8_t data;
while (1)
{
if (pdPASS != xQueueReceive(g_xUART2_RX_Queue, &data, 0))
break;
cnt++;
}
return cnt;
}
int UART4_Flush(struct UART_Device *pDev)
{
int cnt = 0;
uint8_t data;
while (1)
{
if (pdPASS != xQueueReceive(g_xUART4_RX_Queue, &data, 0))
break;
cnt++;
}
return cnt;
}
struct UART_Device g_uart2_dev = {"uart2", UART2_Rx_Start, UART2_Send, UART2_GetData, UART2_Flush};
struct UART_Device g_uart4_dev = {"uart4", UART4_Rx_Start, UART4_Send, UART4_GetData, UART4_Flush};
USB结构体及相关函数如下(ux_device_cdc_acm.c):
static int USBSerial_Init(struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit)
{
return 0;
}
static int USBSerial_Send(struct UART_Device *pDev, uint8_t *datas, uint32_t len, int timeout)
{
return ux_device_cdc_acm_send(datas, len, timeout);
}
static int USBSerial_GetData(struct UART_Device *pdev, uint8_t *pData, int timeout)
{
return ux_device_cdc_acm_getchar(pData, timeout);
}
static int USBSerial_Flush(struct UART_Device *pdev)
{
return ux_device_cdc_acm_flush();
}
struct UART_Device g_usbserial_dev = {"usb", USBSerial_Init, USBSerial_Send, USBSerial_GetData, USBSerial_Flush};
在ux_device.c中进行声明:
extern struct UART_Device g_uart2_dev;
extern struct UART_Device g_uart4_dev;
extern struct UART_Device g_usbserial_dev;
static struct UART_Device *g_uart_devices[] = {&g_uart2_dev, &g_uart4_dev, &g_usbserial_dev};
_modbus_rtu_connect函数如下:
static int _modbus_rtu_connect(modbus_t *ctx)
{
/* 使用usb/UART2/UART4的UART_Device来初始化设备 */
modbus_rtu_t *ctx_rtu = ctx->backend_data;
struct UART_Device *pdev = ctx_rtu->dev;
pdev->Init(pdev, ctx_rtu->baud, ctx_rtu->parity, ctx_rtu->data_bit, ctx_rtu->stop_bit);
ctx->s = 1; //open(ctx_rtu->device, flags);
return 0;
}
_modbus_rtu_flush函数如下:
static int _modbus_rtu_flush(modbus_t *ctx)
{
/* 使用usb/UART2/UART4的UART_Device来flush数据 */
modbus_rtu_t *ctx_rtu = ctx->backend_data;
struct UART_Device *pdev = ctx_rtu->dev;
return pdev->Flush(pdev);
}
3.6 libmodbus实验(板载串口)
本节源码为:

按照下图连线:调试、供电、两个485互连:

创建一个ServerTask,使用CH2(右边的RS485接口,对应UART4)对外通信。
创建一个ClientTask,使用CH1(左边的RS485接口,对应UART2)读写从设备数据。
app_freertos.c
static void CH2_UART4_ServerTask( void *pvParameters )
{
uint8_t *query;
modbus_t *ctx;
int rc;
modbus_mapping_t *mb_mapping;
ctx = modbus_new_st_rtu("uart4", 115200, 'N', 8, 1);
modbus_set_slave(ctx, 1);
query = pvPortMalloc(MODBUS_RTU_MAX_ADU_LENGTH);
mb_mapping = modbus_mapping_new_start_address(0,
10,
0,
10,
0,
10,
0,
10);
memset(mb_mapping->tab_bits, 0, mb_mapping->nb_bits);
memset(mb_mapping->tab_registers, 0x55, mb_mapping->nb_registers*2);
rc = modbus_connect(ctx);
if (rc == -1) {
//fprintf(stderr, "Unable to connect %s\n", modbus_strerror(errno));
modbus_free(ctx);
vTaskDelete(NULL);;
}
for (;;) {
do {
rc = modbus_receive(ctx, query);
/* Filtered queries return 0 */
} while (rc == 0);
/* The connection is not closed on errors which require on reply such as
bad CRC in RTU. */
if (rc == -1 && errno != EMBBADCRC) {
/* Quit */
continue;
}
rc = modbus_reply(ctx, query, rc, mb_mapping);
if (rc == -1) {
//break;
}
if (mb_mapping->tab_bits[0])
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_SET);
vTaskDelay(1000);
mb_mapping->tab_registers[1]++; //将第一个寄存器的数值从0x55开始自增
}
modbus_mapping_free(mb_mapping);
vPortFree(query);
/* For RTU */
modbus_close(ctx);
modbus_free(ctx);
vTaskDelete(NULL);
}
static void CH1_UART2_ClientTask( void *pvParameters )
{
modbus_t *ctx;
int rc;
uint16_t val;
int nb = 1;
int level = 1;
ctx = modbus_new_st_rtu("uart2", 115200, 'N', 8, 1);
modbus_set_slave(ctx, 1);
rc = modbus_connect(ctx);
if (rc == -1) {
//fprintf(stderr, "Unable to connect %s\n", modbus_strerror(errno));
modbus_free(ctx);
vTaskDelete(NULL);;
}
for (;;) {
/* read hoding register 1 */
rc = modbus_read_registers(ctx, 1, nb, &val);
if (rc != nb)
continue;
/* display on lcd */
Draw_Number(0, 0, val, 0xff0000);
/* delay 2s */
vTaskDelay(2000);
modbus_write_bit(ctx, 0, level); //对应上面的server任务,在上面任务中设置了第0位对led灯进行操作,所以在这里读取到数据后去设置第0位的数值
level =! level; //lever取反,即灯会闪烁
}
/* For RTU */
modbus_close(ctx);
modbus_free(ctx);
vTaskDelete(NULL);
}
xTaskCreate(
CH1_UART2_ClientTask,
"CH1_UART2_ClientTask",
200,
NULL,
osPriorityNormal,
NULL);
xTaskCreate(
CH2_UART4_ServerTask,
"CH2_UART4_ServerTask",
200,
NULL,
osPriorityNormal,
NULL);












![Linux环境下的MySQL的卸载、安装与使用[以CentOS7为例说明]](https://i-blog.csdnimg.cn/direct/e01f9506084945f789859c2dbe987cf7.png)