移动命令
1. MOVJ 命令运用案例:
MOVJ VJ=50.00 PL=2 NWAIT UNTIL IN(1)=ON
含义:在这个点以关节坐标,按 50.00%的再现速度,定位精度为 2,同时执行下一条非移动
指令,判断输入信号 1 为 on 后,执行下一条指令。
2. MOVL 命令运用案例:
MOVL V=138 PL=0 NWAIT UNTIL IN(2)=ON
含义:在这个点以直线插补方式向示教位置移动,速度为 138MM/S 定位精度为 0,同时执
行下一条非移动指令,判断输入信号 2 为 on 后,执行下一条指令。
3. MOVC 命令运用案例:
MOVC V=138 PL=0 NWAIT
含义: 用圆弧插补形式向示教位置移动, 速度为 138mm/S ,定位精度为 0 并且执行下一条非移动命令。
子锐机器人常见安川机器人维修配件型号有:YASKAWA机械手L轴减速机 HW0388209-B维修,安川机械臂CPS控制电源 JZNC-YPS01-E维修,YASKAWA机器人伺服电机SGMAV-01ANA-YR14维修等。
4. 附件指令 ENWAIT
功能:附加移动命令的 ENWAIT命令,在被指定的时间前执行下一行的移动命令以为的命令。
5. MOVS 命令运用案例:
MOVS V=120 PL=0 含义:以自由曲线插补形式向示教位置移动,速度为 120mm/s 定位为高。
6. IMOV 命令运用案例:
IMOV P000 V=138 PL=1 RF
含义:仅限被 P000 设定的增量值,从现在的位置根据机器人坐标系以速度138cm/ 分使其移动。
7. SPEED命令运用
NOP
MOVJ VJ=100.00
MOVL V=138
SPEED VJ=50.00 V=276 VR=30.0
MOVJ
MOVL
MOVL VR=60.0
以 100.00%的链接速度移动
以控制点速度 138cm/min 移动
以 50.00%的链接速度移动
以控制点速度 276cm/min 移动
以 60.0 度/秒的姿态角速度移动
作业:设置再限速度
YASKAWA机器人维修操作命令攻略-移动命令运用案例
news2026/2/13 2:37:57
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2080669.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

助力航运管理数字智能化,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建江面河道运输场景下来往航行船只自动检测识别系统
在全球化浪潮的推动下,物流行业作为连接世界的桥梁,其快速发展与进化不仅重塑了国际贸易的格局,更深刻影响着全球贸易金融的进程。其中,海运作为大宗商品跨国、全球化贸易的支柱性运输方式,其重要性不言而喻。随着各国…

ios去水印软件免费版,精选五大高效工具,告别水印烦恼!
随着社交媒体的普及,越来越多的人喜欢在网络上分享自己的生活点滴。在分享视频时,水印往往会影响美观。为了帮助大家解决这个问题,本文为您推荐五大高效免费的iOS去水印软件,让您轻松告别水印烦恼!
软件一:…

第137天:横向移动-Linux_ssh工具杂项Linux靶场环境搭建
实验环境及图解: 通过网盘分享的文件:137-Linux内网环境镜像文件 链接: https://pan.baidu.com/s/1W_5DvhbkGYMqML4mi1rjQA?pwdad6r 提取码: ad6r 一般情况下SSH密钥存放在~/.ssh/目录下,也可以文件中搜索已保存的SSH凭证 ~/.ssh/config ~/.…

eclipse下载安装与配置代码补全与中文版
eclipse下载安装与配置中文版 eclipse下载eclipse安装eclipse配置代码补全eclipse配置中文版 eclipse下载
首先我们从官网下载eclipse,点击后是如下页面 我们往下滑,选择自己需要的版本,在这里我们选择的是Windows的Java开发版本,…

【自动驾驶】决策规划算法 | 数学基础(二)凸优化与非凸优化
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作&…


JVM垃圾回收算法以及垃圾收集器
JVM垃圾回收算法
JVM垃圾回收算法分为三类:标记清除算法、标记整理算法、 复制算法
标记清除算法
垃圾回收分为2个阶段,分别是标记和清除,效率高有磁盘碎片,内存不连续
标记整理算法
标记清除算法一样,将存活对象都向内存另一端移动,然后清理边界以外的垃圾,无…

Windows 11系统 Eclipse 2024版本安装教程和环境搭建
文章目录 目录 文章目录 安装流程 小结 概要安装流程技术细节小结 概要
Eclipse 是一个开源的集成开发环境 (IDE),主要用于 Java 开发,但也支持其他编程语言如 C、Python 和 PHP。它提供了丰富的工具和插件,用于编写、调试和管理代码&#x…
【时时三省】(C语言基础)指针进阶4
山不在高,有仙则名。水不在深,有龙则灵。 ----CSDN 时时三省
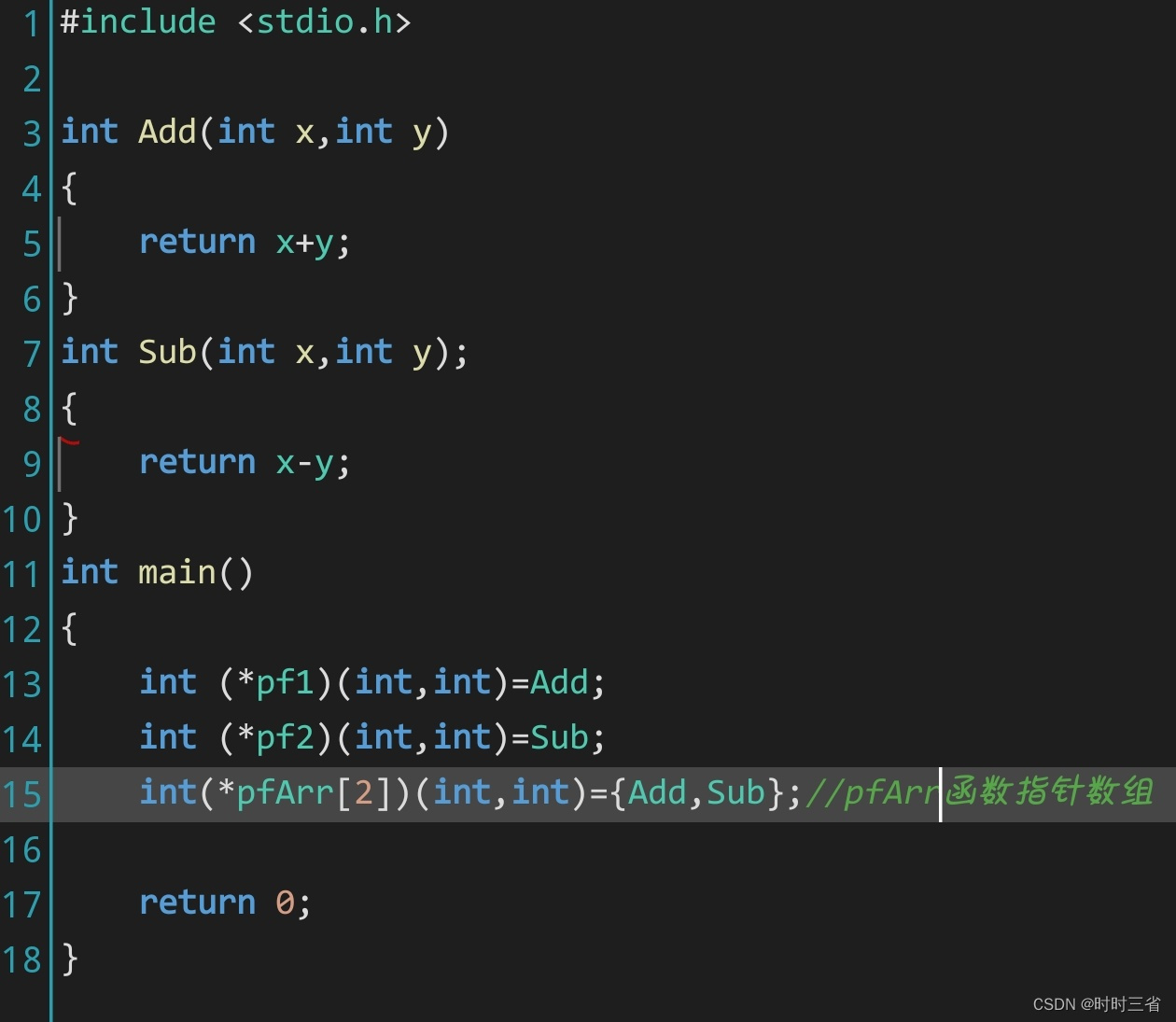
阅读两段有趣的代码:
代码1:
(*(void(*)())0)();
意思是调用0地址处的函数
该函数无参,返回类型是void
1.void(*)()-函数指针
2.(void(*)())0-对0进…

Python编码系列—Python中的安全密码存储与验证:实战指南
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中…

基于SSM+JSP的手机商城系统网站
系统背景 系统管理也都将通过计算机进行整体智能化操作,对于网上手机商城所牵扯的管理及数据保存都是非常多的,例如管理员;主页、个人中心、用户管理、商品分类管理、商品信息管理、系统管理、订单管理,用户;主页、个人…

快速了解Git服务器端基础及基本操作命令(一)
😀前言 本篇博文是关于Git服务器端的一些基础使用及基本操作命令,希望你能够喜欢 🏠个人主页:晨犀主页 🧑个人简介:大家好,我是晨犀,希望我的文章可以帮助到大家,您的满意…

力扣面试150 插入区间 模拟
Problem: 57. 插入区间 👨🏫 代码随想录 模拟
⏰ 时间复杂度: O ( n ) O(n) O(n)
class Solution {public int[][] insert(int[][] intervals, int[] newInterval) {int idx 0;List<int[]> res new ArrayList<>();while (…

如何用Hive进行高校考试分析:大数据技术提升教育质量
✍✍计算机毕业编程指导师 ⭐⭐个人介绍:自己非常喜欢研究技术问题!专业做Java、Python、微信小程序、安卓、大数据、爬虫、Golang、大屏等实战项目。 ⛽⛽实战项目:有源码或者技术上的问题欢迎在评论区一起讨论交流! ⚡⚡ Java、…
论文的AI含量检测靠谱吗
近年来,随着AI技术的飞速发展,越来越多的人开始关注AI在写作领域的应用,尤其是在学术论文中的应用。然而,这也催生了一些新的服务,如“AI含量检测”,声称能够检测论文中是否存在AI生成的内容。这些服务往往…
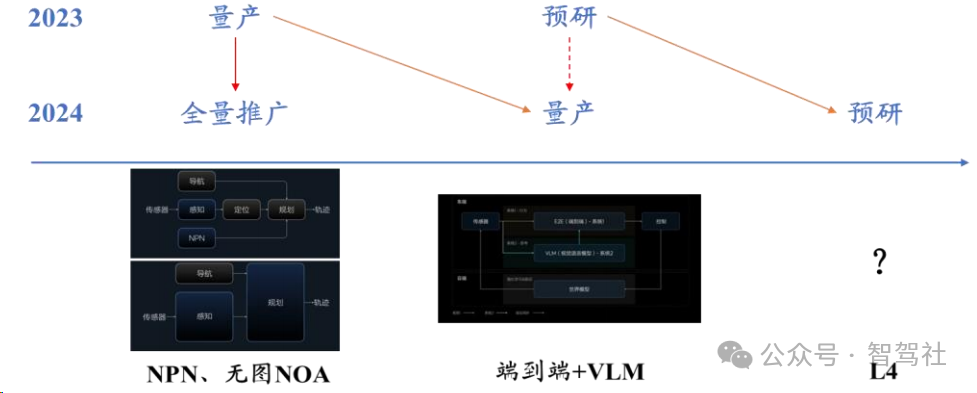
理想自动驾驶技术:探索双系统架构,自动驾驶锁定第一梯队
1、 无图 NOA 全量推送,向 One Model 进发
理想全国无图 NOA 全量推送实现快速追赶。理想 2021 年开始自研自动驾驶,并于2021 年 12 月落地高速 NOA 功能,进展处于国内领先水平,而蔚来、小鹏分别在 2020年 10 月、2021 年 1 月落…

【架构设计】安全架构设计
安全架构概述 在当今以计算机、网络和软件为载体的数字化服务几乎成为人类社会赖以生存的手段,与之而来的计算机犯罪呈现指数上升趋势,因此,信息的可用性、完整性、机密性、可控性和不可抵赖性等安全保障有位重要,为满足这些诉求&…

【Python 千题 —— 基础篇】简易图书管理系统
Python 千题持续更新中 …… 脑图地址 👉:⭐https://twilight-fanyi.gitee.io/mind-map/Python千题.html⭐ 题目描述
题目描述
编写一个面向对象的程序,模拟一个图书管理系统。要求定义一个 Book 类,具有基本的书籍信息功能;然后,创建一个 Library 类,用于管理多个 B…

银河麒麟编译libjpeg库并配置qt环境
1、系统版本:银河麒麟V10
2、libjpeg库下载:http://www.ijg.org/ 其中:files里面是既往的版本
3、
1)解压:jpegsrc.v9f.tar.gz
2)cd jpeg-9f
3) 编译参数解释:
./configure -h # 查看编译参数
--enable-shared # 编译动态库
--enable-static # 编译静态库
--w…