复数的处理
复数 V V V 定义为在 ( x , y ) (x,y) (x,y)-平面中实数对的有序集合。在这方面,复数可以被视为原点 ( 0 , 0 ) (0,0) (0,0) 上的向量。从这个角度看,复数的加法类似于 ( x , y ) (x,y) (x,y)-平面中向量的加法。
然而,乘法对于复数是良好定义的,而对于向量则不是——两个向量的点积是标量,而不是向量,而两个向量在平面上的叉积是一个在该平面之外的向量。另一方面,复数的乘积是一个复数——这是一个非常有用的性质。
复平面上 x x x 或实轴表示为 I I I(表示同相), y y y 或虚轴表示为 Q Q Q(表示正交),如图1.21所示。
复数 V V V 在此 I Q IQ IQ 平面中,其 V I V_I VI 和 V Q V_Q VQ 分别是它的 I I I 和 Q Q Q 分量。根据图1.21,我们有:
V I = ∣ V ∣ cos ∠ V V_I = |V| \cos \angle V VI=∣V∣cos∠V
V Q = ∣ V ∣ sin ∠ V V_Q = |V| \sin \angle V VQ=∣V∣sin∠V
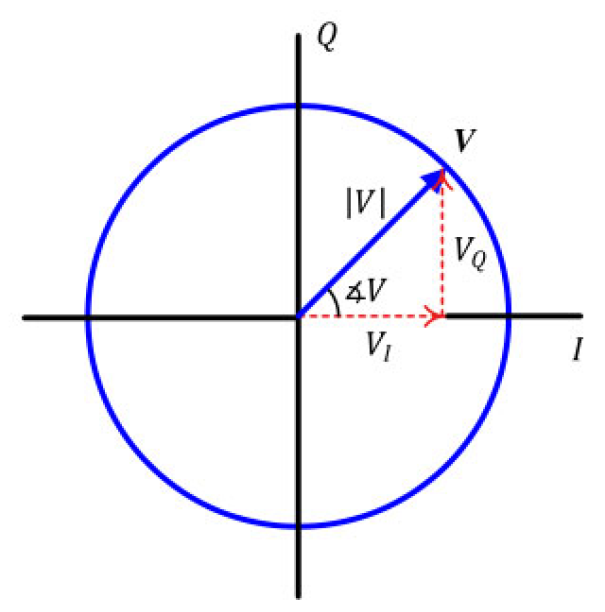
图1.21:在 I Q IQ IQ 平面中的复数 V V V
其中 ∣ V ∣ |V| ∣V∣ 和 ∠ V \angle V ∠V 分别是 V V V 相对于 I I I 轴的大小和角度。
幅度和相位
在复数的极坐标表示中, I Q IQ IQ 平面中复数 V V V 的幅度定义如方程所示为:
∣ V ∣ = V I 2 + V Q 2 |V| = \sqrt{V_I^2 + V_Q^2} ∣V∣=VI2+VQ2
我们使用了性质 cos 2 θ + sin 2 θ = 1 \cos^2\theta + \sin^2\theta = 1 cos2θ+sin2θ=1。定义相位 ∠ V \angle V ∠V 稍微复杂一些。我们可以定义它为 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q / V_I) tan−1(VQ/VI),但这样做的问题在于:
$$\tan^{-1}\left(\frac{+V_Q}{+V_I}\right) = \tan^{-1}\left(\frac{-V_Q}{-V_I}\right) \rightarrow \text{在}[0, +\pi/2],象限I$$$$\tan^{-1}\left(\frac{-V_Q}{+V_I}\right) = \tan^{-1}\left(\frac{+V_Q}{-V_I}\right) \rightarrow \text{在}[0, -\pi/2],象限IV$$我们无法区分 V V V 位于象限I还是象限III。同样, V V V 位于象限II还是象限IV也无法区分。另一方面,图1.21告诉我们, V V V 可以位于任何象限,并且其相位应位于 [ − π , π ] [- \pi, \pi] [−π,π] 范围内,如下所述:
-
象限I: ∠ V \angle V ∠V 应位于 [ 0 , π / 2 ] [0, \pi/2] [0,π/2]。 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q/V_I) tan−1(VQ/VI) 已足够。
-
象限II: ∠ V \angle V ∠V 应位于 [ π / 2 , π ] [\pi/2, \pi] [π/2,π]。 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q/V_I) tan−1(VQ/VI) 在象限IV,需要加上 π \pi π 的调整。
-
象限III: ∠ V \angle V ∠V 应位于 [ − π / 2 , − π ] [- \pi/2, - \pi] [−π/2,−π]。 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q/V_I) tan−1(VQ/VI) 在象限I,需要加上 π \pi π 的调整。
-
象限 IV: ∠ V \angle V ∠V 应位于 [ 0 , − π / 2 ] [0, -\pi/2] [0,−π/2]。 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q/V_I) tan−1(VQ/VI) 已足够。
同样,从图1.22中可以看出:
- 情况 1:当 V I < 0 V_I < 0 VI<0 且 V Q = 0 V_Q = 0 VQ=0 时, V V V 的相位应为 π \pi π 而不是 0。
- 情况 2:当 V I = 0 V_I = 0 VI=0 且 V Q > 0 V_Q > 0 VQ>0 时, V V V 的相位应为 + π / 2 +\pi/2 +π/2。
- 情况 3:当 V I = 0 V_I = 0 VI=0 且 V Q < 0 V_Q < 0 VQ<0 时, V V V 的相位应为 − π / 2 -\pi/2 −π/2。
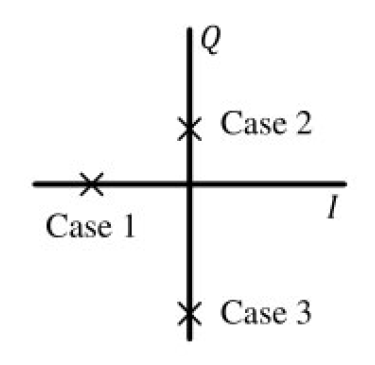
图1.22: tan − 1 ( ⋅ ) \tan^{-1}(·) tan−1(⋅) 不能处理的几个其他情况
考虑到所有四个象限, ∠ V \angle V ∠V 定义为 tan − 1 ( V Q / V I ) \tan^{-1}(V_Q/V_I) tan−1(VQ/VI) 的形式,如下所示:
$$\angle V = \begin{cases} \tan^{-1}\left(\frac{V_Q}{V_I}\right) & V_I > 0 \\ \tan^{-1}\left(\frac{V_Q}{V_I}\right) + \pi & V_I < 0 \text{ 且 } V_Q \geq 0 \\ \tan^{-1}\left(\frac{V_Q}{V_I}\right) - \pi & V_I < 0 \text{ 且 } V_Q < 0 \\ +\pi/2 & V_I = 0 \text{ 且 } V_Q > 0 \\ -\pi/2 & V_I = 0 \text{ 且 } V_Q < 0 \\ \end{cases}$$加法和乘法运算
加法: W = U + V W = U + V W=U+V 意味着:
I → W I = U I + V I I \rightarrow W_I = U_I + V_I I→WI=UI+VI
Q → W Q = U Q + V Q Q \rightarrow W_Q = U_Q + V_Q Q→WQ=UQ+VQ
注意,复数加法实际上包含两个实数加法,分别对应 I I I 和 Q Q Q,如图1.23所示。
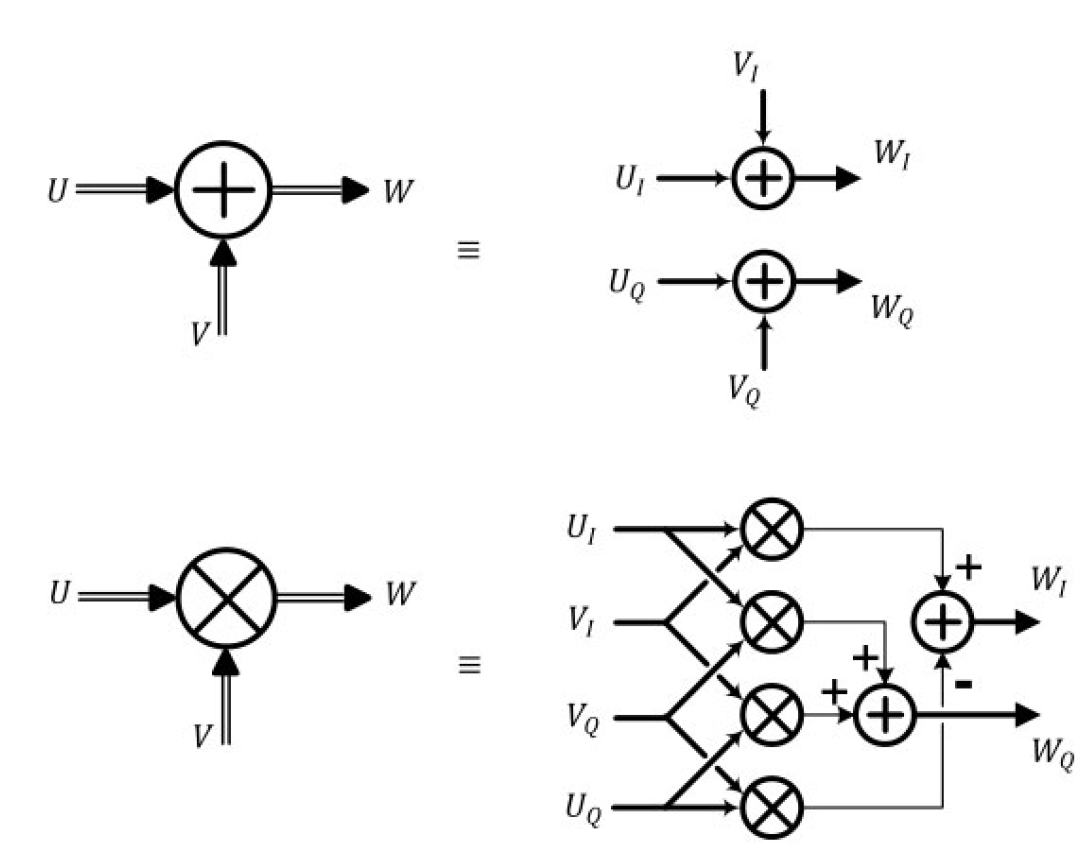
图 1.23:一次复数相加会产生两个实数相加,分别用于 I I I 和 Q Q Q。此外,一次复数相乘会产生4次实数相乘和2次实数相加。
乘法: W = U V W = UV W=UV 意味着
∣ W ∣ = ∣ U ∣ ⋅ ∣ V ∣ |W| = |U| \cdot |V| ∣W∣=∣U∣⋅∣V∣
∠ W = ∠ U + ∠ V \angle W = \angle U + \angle V ∠W=∠U+∠V
(物理意义可以理解为旋转)
在 IQ 形式中导致
$$\begin{aligned} I \rightarrow & \quad W_I = U_I V_I - U_Q V_Q \\ Q \rightarrow & \quad W_Q = U_Q V_I + U_I V_Q \\ \end{aligned}$$复数乘法规则可以写成:
复数乘法:
$$\begin{aligned} I: & \quad I \cdot I - Q \cdot Q \\ Q: & \quad I \cdot Q + I \cdot Q \\ \end{aligned}$$上面的加法规则非常合理:I 分量都加在一起以及两个 Q Q Q 分量。在公式中的乘法规则看起来有点奇怪: I I I 是两个对齐轴项的乘积之差(即 I ⋅ I − Q ⋅ Q I \cdot I - Q \cdot Q I⋅I−Q⋅Q),而 Q Q Q 是两个交叉轴项的乘积之和(即 Q ⋅ I + I ⋅ Q Q \cdot I + I \cdot Q Q⋅I+I⋅Q)。
为了理解复数相乘是如何合理的,请考虑
U I = ∣ U ∣ cos Δ U 和 U Q = ∣ U ∣ sin Δ U U_I = |U| \cos \Delta U \quad \text{和} \quad U_Q = |U| \sin \Delta U UI=∣U∣cosΔU和UQ=∣U∣sinΔU
V I = ∣ V ∣ cos Δ V 和 V Q = ∣ V ∣ sin Δ V V_I = |V| \cos \Delta V \quad \text{和} \quad V_Q = |V| \sin \Delta V VI=∣V∣cosΔV和VQ=∣V∣sinΔV
将这些值代入公式中,
$$\begin{aligned} I &\rightarrow W_I = |U| \cos \Delta U \cdot |V| \cos \Delta V - |U| \sin \Delta U \cdot |V| \sin \Delta V \\ Q &\rightarrow W_Q = |U| \sin \Delta U \cdot |V| \cos \Delta V + |U| \cos \Delta U \cdot |V| \sin \Delta V \\ \end{aligned}$$这导致
$$\begin{aligned} I &\rightarrow W_I = |U||V|(\cos \Delta U \cdot \cos \Delta V - \sin \Delta U \cdot \sin \Delta V) \\ Q &\rightarrow W_Q = |U||V|(\sin \Delta U \cdot \cos \Delta V + \cos \Delta U \cdot \sin \Delta V) \\ \end{aligned}$$使用恒等式 cos A cos B − sin A sin B = cos ( A + B ) \cos A \cos B - \sin A \sin B = \cos(A + B) cosAcosB−sinAsinB=cos(A+B) 和 sin A cos B + cos A sin B = sin ( A + B ) \sin A \cos B + \cos A \sin B = \sin(A + B) sinAcosB+cosAsinB=sin(A+B),
$$\begin{aligned} I &\rightarrow W_I = |U||V| \cos(\Delta U + \Delta V) \\ Q &\rightarrow W_Q = |U||V| \sin(\Delta U + \Delta V) \\ \end{aligned}$$这与公式等价。因此,复数的乘法就是将它们的模数相乘并将它们的相位相加。
(学习过复数的直接忽略就行)
将复数提升到 M M M 次幂
公式 (1.11) 中复数乘法定义的另一个结果是,将复数 V V V 提升到一个幂次,例如 2,生成
$$\begin{aligned} |W| &= |V| \cdot |V| = |V|^2 \\ \angle W &= \angle V + \angle V = 2 \cdot \angle V \end{aligned}$$对于一般的幂 M M M,
$$\begin{aligned} |W| &= |V|^M \\ \angle W &= M \cdot \angle V \\ \end{aligned}$$(公式1.15)
我们可以得出结论,在 IQ 平面中,将复数提升到某个幂次会提高它的模数到该幂次,同时将相位乘以该幂次。
相位旋转
在 IQ 平面中,通过相位 θ \theta θ 旋转复数看起来在复数符号中非常简单,但在 IQ 形式中有些复杂。旋转意味着保持模数不变并将 θ \theta θ 添加到该复数的相位中,如图 1.24 所示。
首先,我们将复数 V V V 乘以模数为 1 且相位为 θ \theta θ 的复数 U U U。使用 ∣ U ∣ = 1 |U| = 1 ∣U∣=1 和 Δ U = θ \Delta U = \theta ΔU=θ,
U I = cos θ 和 U Q = sin θ U_I = \cos \theta \quad \text{和} \quad U_Q = \sin \theta UI=cosθ和UQ=sinθ
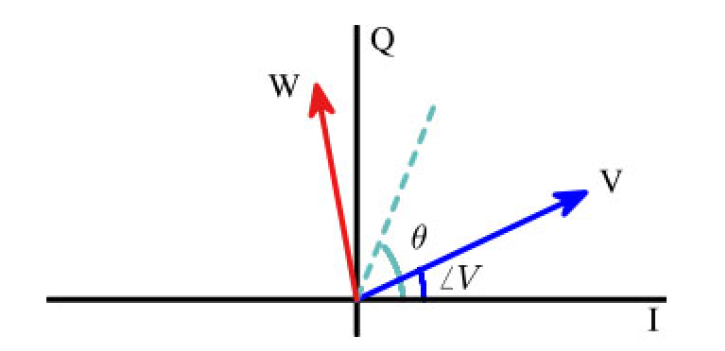
图1.24:旋转意味着在不改变幅度的情况下,将 θ \theta θ 添加到角度上。
将复数的乘法规则(公式1.13)代入,
I → W I = V I ⋅ cos θ − V Q ⋅ sin θ ( 1.16 ) I \rightarrow W_I = V_I \cdot \cos \theta - V_Q \cdot \sin \theta \quad (1.16) I→WI=VI⋅cosθ−VQ⋅sinθ(1.16)
Q → W Q = V Q ⋅ cos θ + V I ⋅ sin θ Q \rightarrow W_Q = V_Q \cdot \cos \theta + V_I \cdot \sin \theta Q→WQ=VQ⋅cosθ+VI⋅sinθ
使用 V I = ∣ V ∣ cos Δ V V_I = |V| \cos \Delta V VI=∣V∣cosΔV 和 V Q = ∣ V ∣ sin Δ V V_Q = |V| \sin \Delta V VQ=∣V∣sinΔV,
I → W I = ∣ V ∣ ( cos Δ V ⋅ cos θ − sin Δ V ⋅ sin θ ) I \rightarrow W_I = |V|(\cos \Delta V \cdot \cos \theta - \sin \Delta V \cdot \sin \theta) I→WI=∣V∣(cosΔV⋅cosθ−sinΔV⋅sinθ)
Q → W Q = ∣ V ∣ ( sin Δ V ⋅ cos θ + cos Δ V ⋅ sin θ ) Q \rightarrow W_Q = |V|(\sin \Delta V \cdot \cos \theta + \cos \Delta V \cdot \sin \theta) Q→WQ=∣V∣(sinΔV⋅cosθ+cosΔV⋅sinθ)
再次使用恒等式 cos A cos B − sin A sin B = cos ( A + B ) \cos A \cos B - \sin A \sin B = \cos(A + B) cosAcosB−sinAsinB=cos(A+B) 和 sin A cos B + cos A sin B = sin ( A + B ) \sin A \cos B + \cos A \sin B = \sin(A + B) sinAcosB+cosAsinB=sin(A+B),
I → W I = ∣ V ∣ cos ( Δ V + θ ) I \rightarrow W_I = |V| \cos (\Delta V + \theta) I→WI=∣V∣cos(ΔV+θ)
Q → W Q = ∣ V ∣ sin ( Δ V + θ ) ( 1.17 ) Q \rightarrow W_Q = |V| \sin (\Delta V + \theta) \quad (1.17) Q→WQ=∣V∣sin(ΔV+θ)(1.17)
这保持了幅度不变,并将角度 θ \theta θ 添加到现有的角度上。
从公式 (1.16) 和公式 (1.17) 可以推导出相位旋转的快速规则。对于复数 V V V 和角度 + θ +\theta +θ(即逆时针旋转),相位旋转规则 规定:
逆时针旋转 θ \theta θ ≡
I ⋅ cos θ − Q ⋅ sin θ (1.18) I \cdot \cos \theta - Q \cdot \sin \theta \quad \text{(1.18)} I⋅cosθ−Q⋅sinθ(1.18)
Q ⋅ cos θ + I ⋅ sin θ Q \cdot \cos \theta + I \cdot \sin \theta Q⋅cosθ+I⋅sinθ
这被认为与乘法规则 I ⋅ I − Q ⋅ Q I \cdot I - Q \cdot Q I⋅I−Q⋅Q 和 Q ⋅ I + I ⋅ Q Q \cdot I + I \cdot Q Q⋅I+I⋅Q 相同。类似地,对于复数 V V V 和角度 − θ -\theta −θ(即顺时针旋转):
顺时针旋转 θ \theta θ ≡
I ⋅ cos θ + Q ⋅ sin θ (1.19) I \cdot \cos \theta + Q \cdot \sin \theta \quad \text{(1.19)} I⋅cosθ+Q⋅sinθ(1.19)
Q ⋅ cos θ − I ⋅ sin θ Q \cdot \cos \theta - I \cdot \sin \theta Q⋅cosθ−I⋅sinθ
上面的相位旋转规则很重要,因为我们在这篇文章中没有使用复数符号。这意味着我们可以快速地识别出一个方程是否通过某个角度旋转了一个复数。上面的两个方程有助于实现这一目的,我们将在后面看到它的许多应用,例如在载波相位同步期间。
复共轭
复数 V ∗ V^* V∗ 的共轭只改变了 Q Q Q 分量的符号。它定义为:
I
→
{
V
∗
}
I
=
V
I
I \quad \rightarrow \quad \{V^*\}_I = V_I
I→{V∗}I=VI
Q
↑
{
V
∗
}
Q
=
−
V
Q
Q \quad \uparrow \quad \{V^*\}_Q = -V_Q
Q↑{V∗}Q=−VQ
(1.20)
\text{(1.20)}
(1.20)
由于幅度是 I I I 和 Q Q Q 分量平方和的结果,因此它保持不变。另一方面, Q Q Q 除以 I I I 是相位,因此共轭导致相位符号的改变。因此,复数共轭的另一种定义是:
∣
V
∗
∣
=
∣
V
∣
|V^*| = |V|
∣V∗∣=∣V∣
∠
V
∗
=
−
∠
V
\angle V^* = -\angle V
∠V∗=−∠V
(1.21)
\text{(1.21)}
(1.21)
复数共轭的一个重要意义在于,将复数乘以其复共轭可以抵消相位并产生其幅度平方。利用上述关系,在方程(1.11)的乘法规则中可以得出 :
∣
V
⋅
V
∗
∣
=
∣
V
∣
2
=
V
I
2
+
V
Q
2
|V \cdot V^*| = |V|^2 = V_I^2 + V_Q^2
∣V⋅V∗∣=∣V∣2=VI2+VQ2
∠
(
V
⋅
V
∗
)
=
0
\angle (V \cdot V^*) = 0
∠(V⋅V∗)=0
(1.22)
\text{(1.22)}
(1.22)
定义信号共轭的另一个有趣的结果是以下恒等式集:
I
→
{
V
+
V
∗
}
=
V
I
+
V
I
I \quad \rightarrow \quad \{V + V^*\} = V_I + V_I
I→{V+V∗}=VI+VI
Q
↑
{
V
+
V
∗
}
=
V
Q
−
V
Q
Q \quad \uparrow \quad \{V + V^*\} = V_Q - V_Q
Q↑{V+V∗}=VQ−VQ
从而生成以下重要结果:
I
→
V
I
=
1
2
{
V
+
V
∗
}
I \quad \rightarrow \quad V_I = \frac{1}{2}\{V + V^*\}
I→VI=21{V+V∗}
Q
↑
0
=
1
2
{
V
+
V
∗
}
Q \quad \uparrow \quad 0 = \frac{1}{2}\{V + V^*\}
Q↑0=21{V+V∗}
(1.23)
\text{(1.23)}
(1.23)
同样,
I
→
0
=
1
2
{
V
−
V
∗
}
I \quad \rightarrow \quad 0 = \frac{1}{2}\{V - V^*\}
I→0=21{V−V∗}
Q
↑
V
Q
=
1
2
{
V
−
V
∗
}
Q \quad \uparrow \quad V_Q = \frac{1}{2}\{V - V^*\}
Q↑VQ=21{V−V∗}
(1.24)
\text{(1.24)}
(1.24)

![vue常见**MS题 [2]](https://i-blog.csdnimg.cn/direct/637f5f6168914395a55cd79cf0639c85.png)