文章目录
- 一、互斥量的使用场合
- 二、互斥量函数
- 1、创建
- 2、其他函数
- 三、示例: 优先级继承
- 四、递归锁
- 1、死锁的概念
- 2、自我死锁
- 3、函数
怎么独享厕所?自己开门上锁,完事了自己开锁。
你当然可以进去后,让别人帮你把门:但是,命运就掌握在别人手上了。
使用队列、信号量,都可以实现互斥访问,以信号量为例:
- 信号量初始值为1
- 任务A想上厕所,"take"信号量成功,它进入厕所
- 任务B也想上厕所,"take"信号量不成功,等待
- 任务A用完厕所,"give"信号量;轮到任务B使用
这需要有2个前提:
- 任务B很老实,不撬门(一开始不"give"信号量)
- 没有坏人:别的任务不会"give"信号量
可以看到,使用信号量确实也可以实现互斥访问,但是不完美。
使用互斥量可以解决这个问题,互斥量的名字取得很好:
- 量:值为0、1
- 互斥:用来实现互斥访问
它的核心在于:谁上锁,就只能由谁开锁。
很奇怪的是,FreeRTOS的互斥锁,并没有在代码上实现这点:
- 即使任务A获得了互斥锁,任务B竟然也可以释放互斥锁。
- 谁上锁、谁释放:只是约定。
本章涉及如下内容:
- 为什么要实现互斥操作
- 怎么使用互斥量
- 互斥量导致的优先级反转、优先级继承
一、互斥量的使用场合
在多任务系统中,任务A正在使用某个资源,还没用完的情况下任务B也来使用的话,就可能导致问题。
比如对于串口,任务A正使用它来打印,在打印过程中任务B也来打印,客户看到的结果就是A、B的信息混杂在一起。
这种现象很常见:
- 访问外设:刚举的串口例子
- 读、修改、写操作导致的问题
对于同一个变量,比如int a,如果有两个任务同时写它就有可能导致问题。
对于变量的修改,C代码只有一条语句,比如:a=a+8;,它的内部实现分为3步:读出原值、修改、写入。
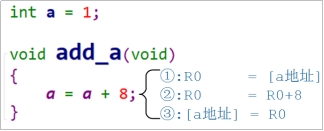
我们想让任务A、B都执行add_a函数,a的最终结果是1+8+8=17。
假设任务A运行完代码①,在执行代码②之前被任务B抢占了:现在任务A的R0等于1。
任务B执行完add_a函数,a等于9。
任务A继续运行,在代码②处R0仍然是被抢占前的数值1,执行完②③的代码,a等于9,这跟预期的17不符合。
-
对变量的非原子化访问
修改变量、设置结构体、在16位的机器上写32位的变量,这些操作都是非原子的。也就是它们的操作过程都可能被打断,如果被打断的过程有其他任务来操作这些变量,就可能导致冲突。
-
函数重入
“可重入的函数"是指:多个任务同时调用它、任务和中断同时调用它,函数的运行也是安全的。可重入的函数也被称为"线程安全”(thread safe)。
每个任务都维持自己的栈、自己的CPU寄存器,如果一个函数只使用局部变量,那么它就是线程安全的。
函数中一旦使用了全局变量、静态变量、其他外设,它就不是"可重入的",如果该函数正在被调用,就必须阻止其他任务、中断再次调用它。
上述问题的解决方法是:任务A访问这些全局变量、函数代码时,独占它,就是上个锁。这些全局变量、函数代码必须被独占地使用,它们被称为临界资源。
互斥量也被称为互斥锁,使用过程如下:
- 互斥量初始值为1
- 任务A想访问临界资源,先获得并占有互斥量,然后开始访问
- 任务B也想访问临界资源,也要先获得互斥量:被别人占有了,于是阻塞
- 任务A使用完毕,释放互斥量;任务B被唤醒、得到并占有互斥量,然后开始访问临界资源
- 任务B使用完毕,释放互斥量
正常来说:在任务A占有互斥量的过程中,任务B、任务C等等,都无法释放互斥量。
但是FreeRTOS未实现这点:任务A占有互斥量的情况下,任务B也可释放互斥量。
二、互斥量函数
1、创建
互斥量是一种特殊的二进制信号量。
使用互斥量时,先创建、然后去获得、释放它。使用句柄来表示一个互斥量。
创建互斥量的函数有2种:动态分配内存,静态分配内存,函数原型如下:
/* 创建一个互斥量,返回它的句柄。
* 此函数内部会分配互斥量结构体
* 返回值: 返回句柄,非NULL表示成功
*/
SemaphoreHandle_t xSemaphoreCreateMutex( void );
/* 创建一个互斥量,返回它的句柄。
* 此函数无需动态分配内存,所以需要先有一个StaticSemaphore_t结构体,并传入它的指针
* 返回值: 返回句柄,非NULL表示成功
*/
SemaphoreHandle_t xSemaphoreCreateMutexStatic( StaticSemaphore_t *pxMutexBuffer );
要想使用互斥量,需要在配置文件FreeRTOSConfig.h中定义:
#define configUSE_MUTEXES 1
2、其他函数
要注意的是,互斥量不能在ISR中使用。
各类操作函数,比如删除、give/take,跟一般是信号量是一样的。
/*
* xSemaphore: 信号量句柄,你要删除哪个信号量, 互斥量也是一种信号量
*/
void vSemaphoreDelete( SemaphoreHandle_t xSemaphore );
/* 释放 */
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore );
/* 释放(ISR版本) */
BaseType_t xSemaphoreGiveFromISR(
SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken
);
/* 获得 */
BaseType_t xSemaphoreTake(
SemaphoreHandle_t xSemaphore,
TickType_t xTicksToWait
);
/* 获得(ISR版本) */
xSemaphoreGiveFromISR(
SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken
);
三、示例: 优先级继承
本节代码为:22_mutex_priority_inversion,主要看nwatch\game2.c。
12章12.5示例的问题在于,car1低优先级任务获得了锁,但是它优先级太低而无法运行。
如果能提升car1任务的优先级,让它能尽快运行、释放锁,"优先级反转"的问题不就解决了吗?
把car1任务的优先级提升到什么水平?car3也想获得同一个互斥锁,不成功而阻塞时,它会把car1的优先级提升得跟car3一样。
这就是优先级继承:
- 假设持有互斥锁的是任务A,如果更高优先级的任务B也尝试获得这个锁
- 任务B说:你既然持有宝剑,又不给我,那就继承我的愿望吧
- 于是任务A就继承了任务B的优先级
- 这就叫:优先级继承
- 等任务A释放互斥锁时,它就恢复为原来的优先级
- 互斥锁内部就实现了优先级的提升、恢复
在22_mutex_priority_inversion里,创建的是互斥量,代码如下:
static void car1_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 获得信号量 */
xSemaphoreTake(xSemTicks,portMAX_DELAY);//car1获得信号量开始运行
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
vTaskDelay(50);
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
xSemaphoreGive(xSemTicks);
vTaskDelete(NULL);
}
}
// }
}
}
static void car2_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
vTaskDelay(1000);//car2等待1s后开始运行 不用等待car1释放信号量
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 获得信号量 */
//xSemaphoreTake(xSemTicks,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
//vTaskDelay(50);
mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);//car2没有获取信号量 所以当其运行完毕自杀后car1继续运行
vTaskDelete(NULL);
}
}
// }
}
}
static void car3_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
vTaskDelay(2000);//car3延时2s后等待获得信号量开始运行
/* 获得信号量 */
xSemaphoreTake(xSemTicks,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
//vTaskDelay(50);
mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
xSemaphoreGive(xSemTicks);
vTaskDelete(NULL);
}
}
// }
}
}
void car_game(void)
{
int i,j;
int x;
g_framebuffer = LCD_GetFrameBuffer(&g_xres, &g_yres, &g_bpp);
draw_init();
draw_end();
//xSemTicks = xSemaphoreCreateBinary();//创建一个二值信号量(这里有个现象:由于二值信号量的初始值为0 所以下面三个任务无法获得信号量 都将原地不动 解决方法:释放信号量)
xSemTicks = xSemaphoreCreateMutex();//创建互斥量
/* 绘制路标 */
for(i=0;i<3;i++)
{
for(j=0;j<8;j++)
{
draw_bitmap(16*j, 16+17*i, roadMarking, 8, 1, NOINVERT, 0);
draw_flushArea(16*j, 16+17*i, 8, 1);
}
}
#if 0
/* 显示三辆小车 */
for(i=0;i<3;i++)
{
draw_bitmap(cars[i].x, cars[i].y, carImg, 15, 16, NOINVERT, 0);
draw_flushArea(cars[i].x, cars[i].y, 15, 16);
}
#endif
xTaskCreate(car1_task, "car1task", 128, &cars[0], osPriorityNormal, NULL);
xTaskCreate(car2_task, "car2task", 128, &cars[1], osPriorityNormal+2, NULL);
xTaskCreate(car3_task, "car3task", 128, &cars[2], osPriorityNormal+3, NULL);
}
把二值信号量创建打开,互斥量创建注释掉就会有优先级反转的问题。
把二值信号量创建注销掉,互斥量创建打开,就解决了优先级反转的问题。
22_mutex_priority_inversion的实验现象为:car1先运行一会;然后car2运行一会;接着car3任务启动,但是它无法获得互斥量而阻塞,并且提升了car1的优先级;于是:car1、car2交替运行(虽然car2的优先级高于car1,但是car2会使用vTaskDelay阻塞,car1就有机会运行了);当car1运行到终点,释放了互斥量,car3就可以运行了。
四、递归锁
1、死锁的概念
日常生活的死锁:我们只招有工作经验的人!我没有工作经验怎么办?那你就去找工作啊!
假设有2个互斥量M1、M2,2个任务A、B:
- A获得了互斥量M1
- B获得了互斥量M2
- A还要获得互斥量M2才能运行,结果A阻塞
- B还要获得互斥量M1才能运行,结果B阻塞
- A、B都阻塞,再无法释放它们持有的互斥量
- 死锁发生!
2、自我死锁
假设这样的场景:
- 任务A获得了互斥锁M
- 它调用一个库函数
- 库函数要去获取同一个互斥锁M,于是它阻塞:任务A休眠,等待任务A来释放互斥锁!
- 死锁发生!
3、函数
怎么解决这类问题?可以使用递归锁(Recursive Mutexes),它的特性如下:
- 任务A获得递归锁M后,它还可以多次去获得这个锁
- "take"了N次,要"give"N次,这个锁才会被释放
递归锁的函数根一般互斥量的函数名不一样,参数类型一样,列表如下:
| 递归锁 | 一般互斥量 | |
|---|---|---|
| 创建 | xSemaphoreCreateRecursiveMutex | xSemaphoreCreateMutex |
| 获得 | xSemaphoreTakeRecursive | xSemaphoreTake |
| 释放 | xSemaphoreGiveRecursive | xSemaphoreGive |
函数原型如下:
/* 创建一个递归锁,返回它的句柄。
* 此函数内部会分配互斥量结构体
* 返回值: 返回句柄,非NULL表示成功
*/
SemaphoreHandle_t xSemaphoreCreateRecursiveMutex( void );
/* 释放 */
BaseType_t xSemaphoreGiveRecursive( SemaphoreHandle_t xSemaphore );
/* 获得 */
BaseType_t xSemaphoreTakeRecursive(
SemaphoreHandle_t xSemaphore,
TickType_t xTicksToWait
);