OpenCV 基本使用
参考教程:
GitHub - gaoxiang12/slambook2: edition 2 of the slambook

1. 安装 OpenCV
1.1 下载 OpenCV
参考教程:
无法定位软件包libjasper-dev的解决办法-CSDN博客
视觉slam14讲ch5 opencv安装 ubuntu20.04_libvtk5-dev-CSDN博客
OpenCV提供了大量的开源图像算法,是计算机视觉领域使用极广的图像处理算法库。在Ubuntu系统下,OpenCV有从源代码安装和只安装库文件两种方式可以选择:
(1)从源代码安装,是指从OpenCV网站下载所有的OpenCV源代码,并在机器上编译以便使用。好处是可以选择的版本比较丰富,而且也能看到源代码,不过需要花费一些编译时间。
(2)只安装库文件,是指通过Ubuntu安装由Ubuntu社区人员已经编译好的库文件,无须重新编译一遍。
因为我们使用较新版本的OpenCV,所以必须选择从源代码安装的方式来安装它。一来,可以调整一些编译选项,匹配编程环境(例如,需不需要GPU加速等);再者,可以使用一些额外的功能。OpenCV目前维护三个主要版本,分为OpenCV2.4系列、OpenCV 3系列和OpenCV 4系列。当前使用OpenCV 3系列。
从如下网站中下载源代码:
Releases - OpenCV
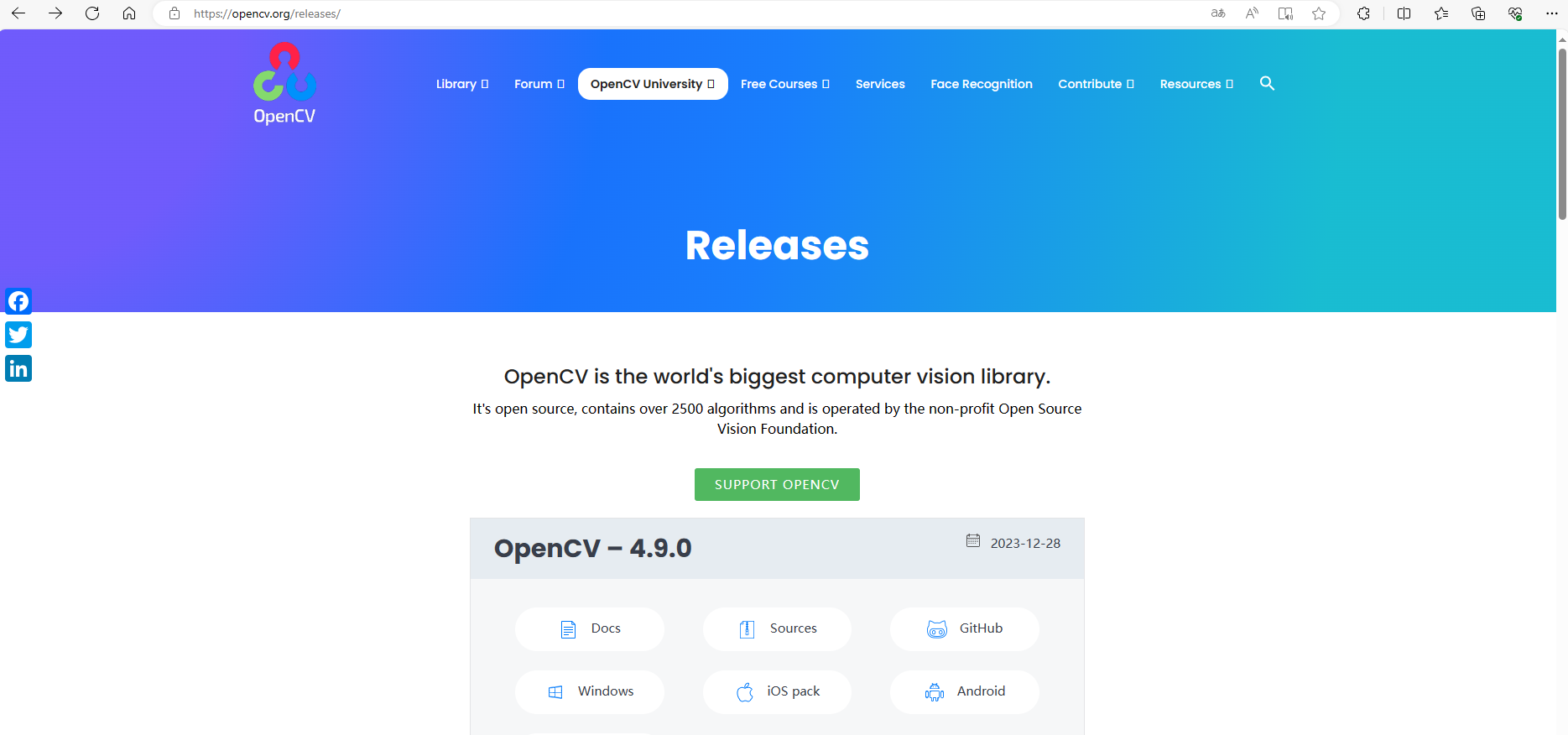
页面下滑,选择OpenCV – 3.4.16版本,点击”Sources“进行下载
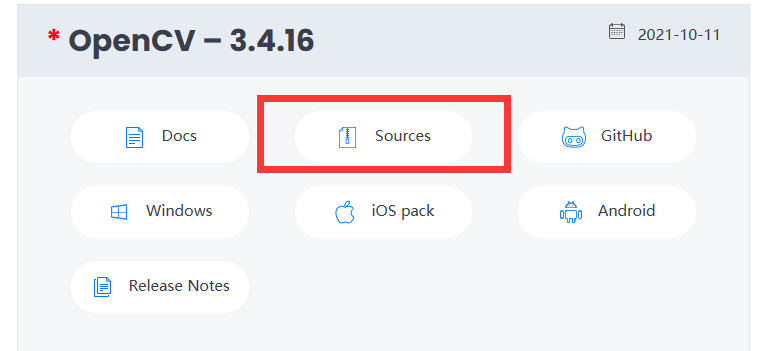
下载得到如下的压缩包

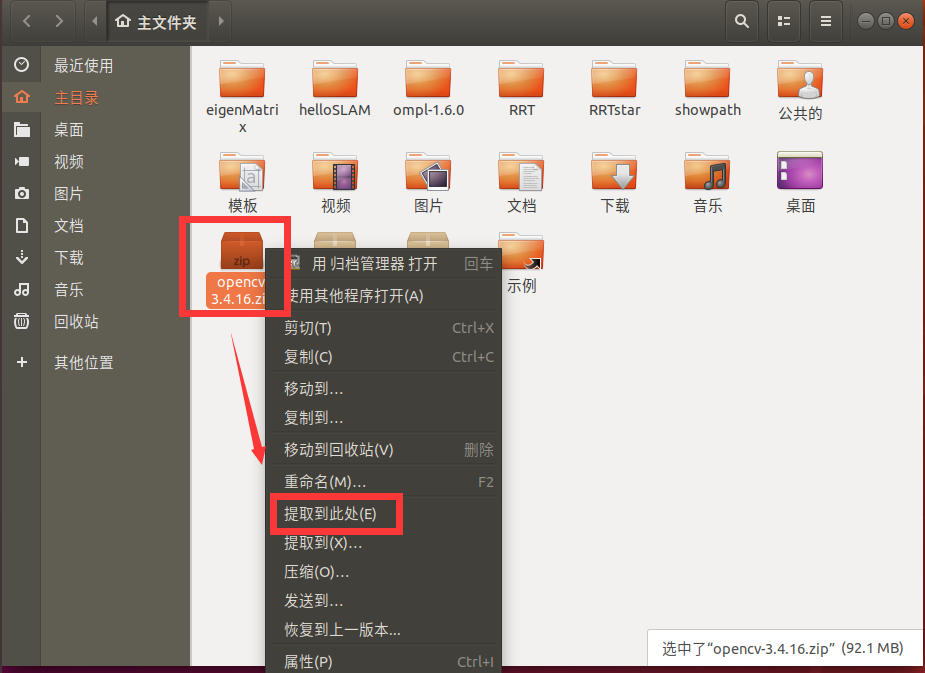
将opencv-3.4.16.zip文件拖拽至虚拟机的home文件夹下:
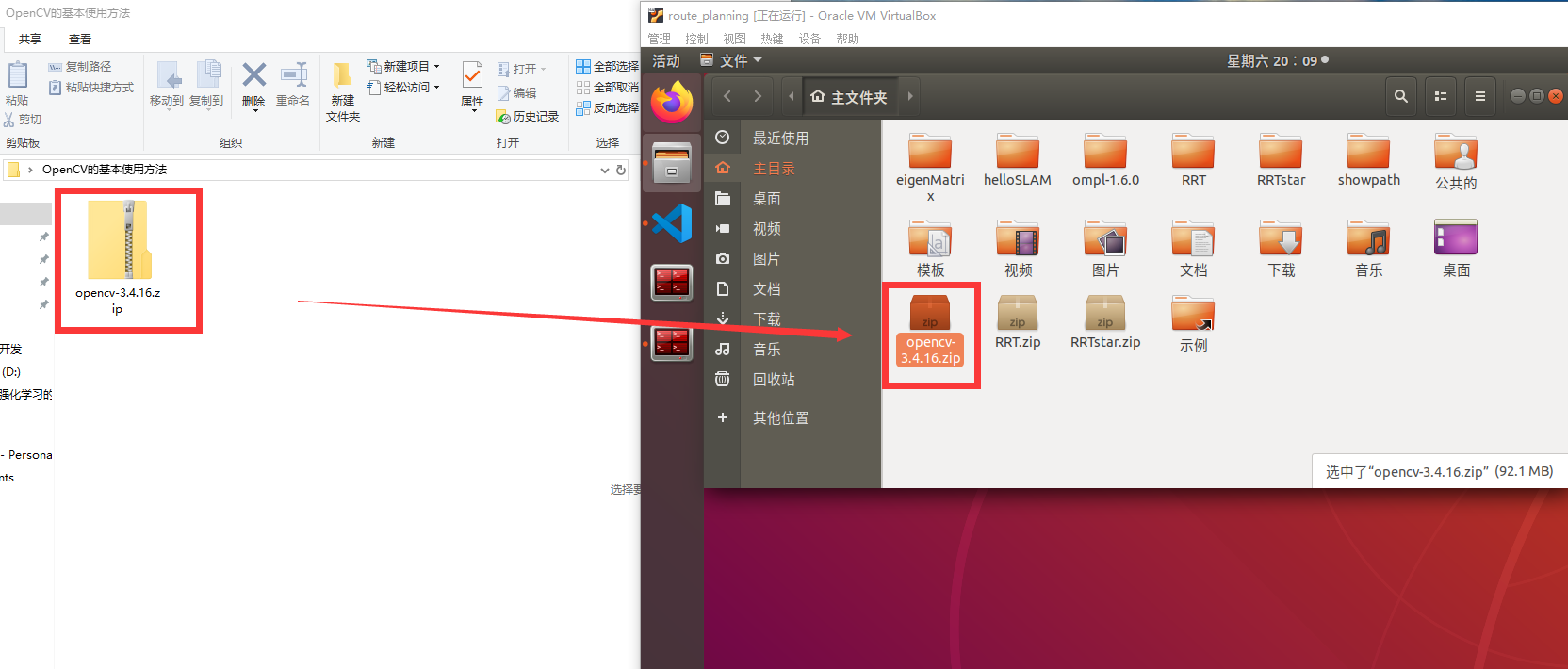
点击opencv-3.4.16.zip文件,右键,选择“提取到此处”
1.2 配置依赖项并编译
编译之前,先来安装OpenCV的依赖项:
rosnoetic@rosnoetic-VirtualBox:~$ sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt update
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt upgrade
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install build-essential libgtk2.0-dev libvtk6-dev libjpeg-dev libtiff5-dev libjasper-dev libopenexr-dev libtbb-dev libcanberra-gtk-module
事实上,OpenCV的依赖项很多,缺少某些编译项会影响它的部分功能。OpenCV在cmake阶段检查依赖项是否会安装,并调整自己的功能。如果电脑上有GPU并且安装了相关依赖项,OpenCV也会把GPU加速打开。不过当前,上述依赖项已经足够了。
安装完依赖项后进行编译:
rosnoetic@rosnoetic-VirtualBox:~$ cd opencv-3.4.16/
rosnoetic@rosnoetic-VirtualBox:~/opencv-3.4.16$ mkdir build
rosnoetic@rosnoetic-VirtualBox:~/opencv-3.4.16$ cd build/
rosnoetic@rosnoetic-VirtualBox:~/opencv-3.4.16/build$ cmake ..
接着进行编译
rosnoetic@rosnoetic-VirtualBox:~/opencv-3.4.16/build$ make
整个编译过程大概需要二十分钟到一小时不等。
make之后,调用sudo make install将OpenCV安装到电脑上(而不是仅仅编译)。
rosnoetic@rosnoetic-VirtualBox:~/opencv-3.4.16/build$ sudo make install
2. 操作 OpenCV 图像
2.1 编写 imageBasics 函数
2.1.1 创建文件夹
通过终端创建一个名为imageBasics的文件夹以保存我们的VSCode项目,在/imageBasics目录下打开vscode。
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p imageBasics
rosnoetic@rosnoetic-VirtualBox:~$ cd imageBasics/
rosnoetic@rosnoetic-VirtualBox:~/imageBasics$ code .
2.1.2 编写源代码
新建文件imageBasics.cpp
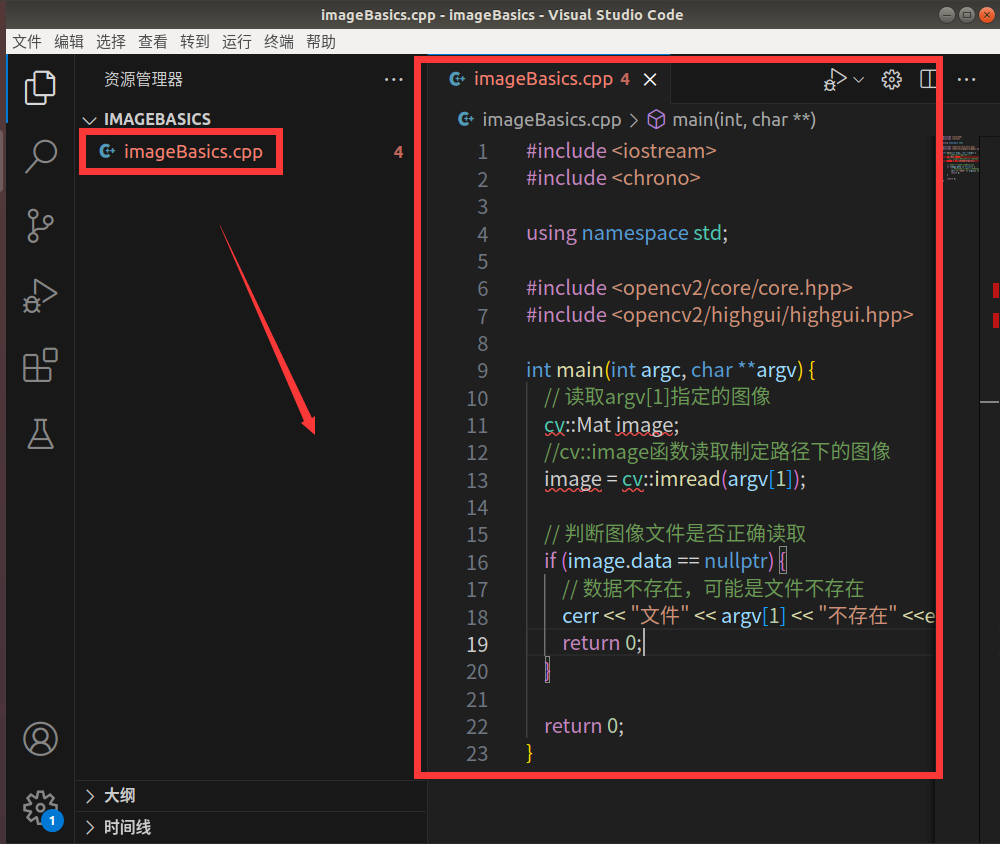
在imageBasics.cpp粘贴如下代码并保存(Ctrl+S)
#include <iostream>
#include <chrono>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
int main(int argc, char argv) {
// 读取argv[1]指定的图像
cv::Mat image;
//cv::image函数读取制定路径下的图像
image = cv::imread(argv[1]);
// 判断图像文件是否正确读取
if (image.data == nullptr) {
// 数据不存在,可能是文件不存在
cerr << "文件" << argv[1] << "不存在" <<endl;
return 0;
}
// 文件顺利读取,首先输出一些基本信息
cout << "图像宽为: " << image.cols << ",高为: " << image.rows
<< ",通道数为" << image.channels() << endl;
cv::imshow("image",image); // cv::imshow显示图像
cv::waitKey(0); // 暂停程序,等待一个按键输入
// 判断imgae的类型
if (image.type() != CV_8UC1 && image.type() != CV_8UC3) {
// 图像类型不符合要求
cout << "请输入一张彩色图或灰度图" << endl;
return 0;
}
// 遍历图像,请注意以下遍历方式也使用于随机像素访问
// 使用std::chrono给算法计时
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
for (size_t y = 0; y < image.rows; y++) {
// 用cv::Mat::ptr获得图像的行指针,<unsigned char>指定类型,(y)是一个索引值,表示我们要访问的行数
unsigned char *row_ptr = image.ptr<unsigned char>(y);
for (size_t x = 0; x < image.cols; x++) {
// 访问位于x,y处的像素
unsigned char *data_ptr = &row_ptr[x * image.channels()]; // data_ptr指针指向待访问的像素数据
// 输出该像素的每个通道,如果是灰度图,那么通道是1
for (int c = 0; c != image.channels(); c++) {
unsigned char data = data_ptr[c]; // data为I(x,y)第c个通道的像素值
}
}
}
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
// 计算消耗时间
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>> (t2-t1);
cout << "遍历图所用时间: " << time_used.count() << "秒。"<< endl;
// 关于cv::Mat的拷贝
// 直接赋值并不会拷贝数据
cv::Mat image_another = image;
// 此时修改image_another,会导致image发生变化
image_another(cv::Rect(0, 0, 100, 100)).setTo(0); // 将左上角100*100的块置为0
cv::imshow("image",image);
cv::waitKey(0);
// 使用clone深拷贝复制数据
cv::Mat image_clone = image.clone();
image(cv::Rect(0, 0, 100, 100)).setTo(255);
cv::imshow("image", image);
cv::imshow("image_clone", image_clone);
cv::waitKey(0);
// 删除所有的窗口
cv::destroyAllWindows();
return 0;
}
2.2 新建 CMakeLists.txt 文件
新建CMakeLists.txt文件
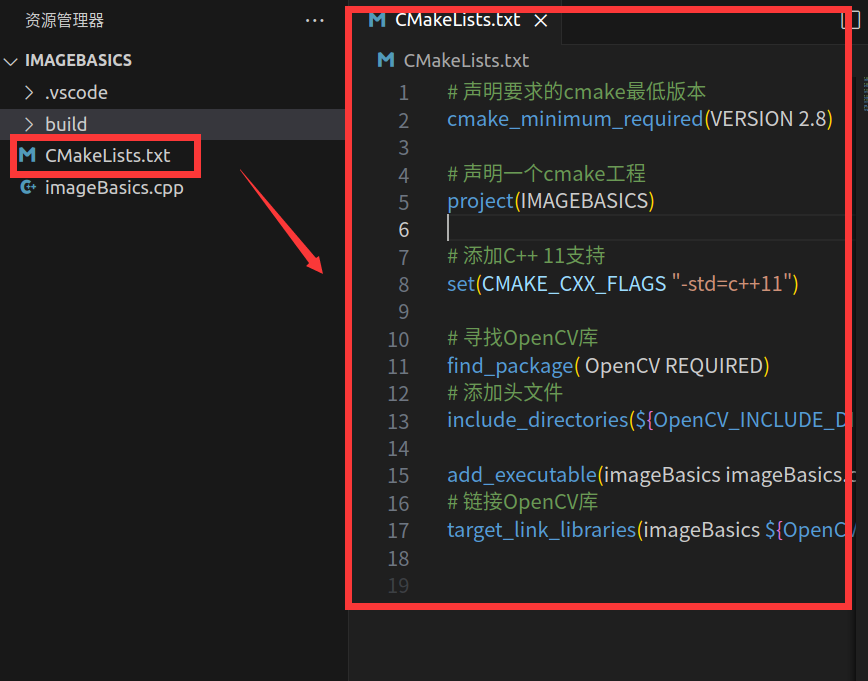
在CMakeLists.txt中添加如下内容:
# 声明要求的cmake最低版本
cmake_minimum_required(VERSION 2.8)
# 声明一个cmake工程
project(IMAGEBASICS)
# 添加C++ 11支持
set(CMAKE_CXX_FLAGS "-std=c++11")
# 寻找OpenCV库
find_package( OpenCV REQUIRED)
# 添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(imageBasics imageBasics.cpp)
# 链接OpenCV库
target_link_libraries(imageBasics ${OpenCV_LIBS})
由于程序中使用了C++11标准(如nullptr和chrono),因此需要设置编译器set(CMAKE_CXX_FLAGS "-std=c++11")。
2.3 cmake 编译
ctrl+alt+T打开终端,执行如下指令进行cmake编译
rosnoetic@rosnoetic-VirtualBox:~$ cd imageBasics/
rosnoetic@rosnoetic-VirtualBox:~/imageBasics$ mkdir build
rosnoetic@rosnoetic-VirtualBox:~/imageBasics$ cd build/
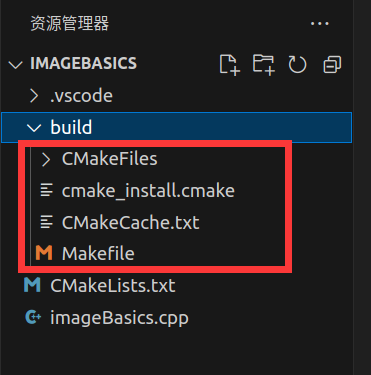
rosnoetic@rosnoetic-VirtualBox:~/imageBasics/build$ cmake ..
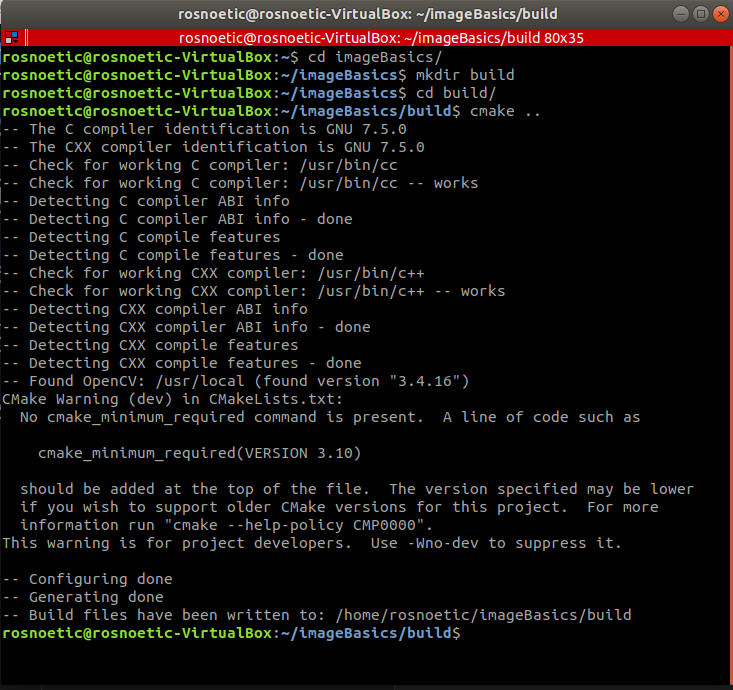
我们新建了一个中间文件夹”build“,然后进入build文件夹,通过cmake ..命令对上一层文件夹,也就是代码所在的文件夹进行编译。这样,cmake产生的中间文件就会生成在build文件夹中,如下图所示,和源代码分开。
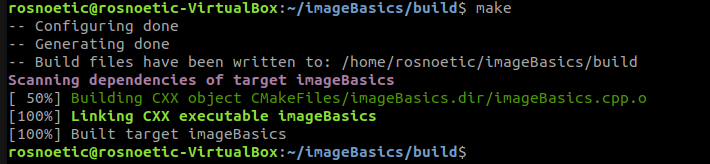
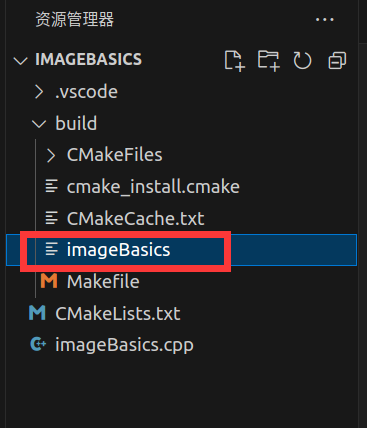
接着make对工程进行编译
rosnoetic@rosnoetic-VirtualBox:~/imageBasics/build$ make
2.4 运行
将ubuntu.png文件拖拽至imageBasics/build文件夹下
进一步的调用可执行文件:
rosnoetic@rosnoetic-VirtualBox:~/imageBasics/build$ ./imageBasics ubuntu.png
依次显示如下内容:

在image窗口,按enter键执行下一个程序(也就是停留在了cv::waitKey())