文章目录
- 前言
- 一、概述
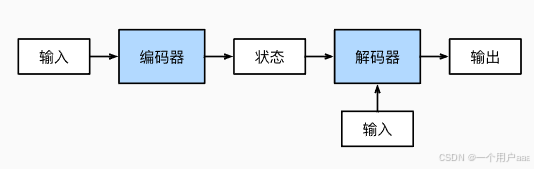
- 二、二次开发基础(自定义工作队列,自定义uorb)
- 三、自定义串口驱动(添加一个毫米波雷达并定高)
- 四、自定义I2C驱动(驱动一个oled显示屏)
- 五、自定义参数
- 六、自定义日志
- 七、自定义机型
- 八、自定义mavlink消息和QGC通信
- 九、自定义mavlink消息和MAVROS通信
- 十、OFFBAORD控制接口(状态控制 pwm输出)
- 十一、基于模型开发(替换控制律/基于模型的编队)
前言
交流学习可加文章底部作者微信
本教程的适用对象:
1、零基础或者有较少基础(尚未入门)
2、希望在短时间里(一到两个月)学会对PX4进行二次开发的开源爱好者或工程师
硬件:
pixhawk飞控
超维M系列无人机
软件:
PX4 1.13.3
QGC4.2.4
一、概述
二、二次开发基础(自定义工作队列,自定义uorb)
在modules文件夹下添加work_item文件夹

添加下面四个文件

CMakeLists.txt
px4_add_module(
MODULE modules__work_item
MAIN work_item_test
COMPILE_FLAGS
#-DDEBUG_BUILD # uncomment for PX4_DEBUG output
#-O0 # uncomment when debugging
SRCS
WorkItemTest.cpp
WorkItemTest.hpp
DEPENDS
px4_work_queue
)
Kconfig
menuconfig MODULES_WORK_ITEM
bool "work_item"
default n
---help---
Enable support for work_item
WorkItemTest.cpp
#include "WorkItemTest.hpp"
WorkItemTest::WorkItemTest() :
ModuleParams(nullptr),
ScheduledWorkItem(MODULE_NAME, px4::wq_configurations::test1)
{
}
WorkItemTest::~WorkItemTest()
{
perf_free(_loop_perf);
perf_free(_loop_interval_perf);
}
bool WorkItemTest::init()
{
ScheduleOnInterval(100000_us);
return true;
}
void WorkItemTest::Run()
{
if (should_exit()) {
ScheduleClear();
exit_and_cleanup();
return;
}
perf_begin(_loop_perf);
perf_count(_loop_interval_perf);
// Check if parameters have changed
if (_parameter_update_sub.updated()) {
// clear update
parameter_update_s param_update;
_parameter_update_sub.copy(¶m_update);
updateParams(); // update module parameters (in DEFINE_PARAMETERS)
}
PX4_INFO("test workitem");
perf_end(_loop_perf);
}
int WorkItemTest::task_spawn(int argc, char *argv[])
{
WorkItemTest *instance = new WorkItemTest();
if (instance) {
_object.store(instance);
_task_id = task_id_is_work_queue;
if (instance->init()) {
return PX4_OK;
}
} else {
PX4_ERR("alloc failed");
}
delete instance;
_object.store(nullptr);
_task_id = -1;
return PX4_ERROR;
}
int WorkItemTest::print_status()
{
perf_print_counter(_loop_perf);
perf_print_counter(_loop_interval_perf);
return 0;
}
int WorkItemTest::custom_command(int argc, char *argv[])
{
return print_usage("unknown command");
}
int WorkItemTest::print_usage(const char *reason)
{
if (reason) {
PX4_WARN("%s\n", reason);
}
PRINT_MODULE_DESCRIPTION(
R"DESCR_STR(
### Description
Example of a simple module running out of a work queue.
)DESCR_STR");
PRINT_MODULE_USAGE_NAME("work_item_example", "template");
PRINT_MODULE_USAGE_COMMAND("start");
PRINT_MODULE_USAGE_DEFAULT_COMMANDS();
return 0;
}
extern "C" __EXPORT int work_item_test_main(int argc, char *argv[])
{
return WorkItemTest::main(argc, argv);
}
WorkItemTest.hpp
#pragma once
#include <px4_platform_common/defines.h>
#include <px4_platform_common/module.h>
#include <px4_platform_common/module_params.h>
#include <px4_platform_common/posix.h>
#include <px4_platform_common/px4_work_queue/ScheduledWorkItem.hpp>
#include <drivers/drv_hrt.h>
#include <lib/perf/perf_counter.h>
#include <uORB/Publication.hpp>
#include <uORB/Subscription.hpp>
#include <uORB/SubscriptionCallback.hpp>
#include <uORB/topics/orb_test.h>
#include <uORB/topics/parameter_update.h>
#include <uORB/topics/sensor_accel.h>
#include <uORB/topics/vehicle_status.h>
using namespace time_literals;
class WorkItemTest : public ModuleBase<WorkItemTest>, public ModuleParams, public px4::ScheduledWorkItem
{
public:
WorkItemTest();
~WorkItemTest() override;
/** @see ModuleBase */
static int task_spawn(int argc, char *argv[]);
/** @see ModuleBase */
static int custom_command(int argc, char *argv[]);
/** @see ModuleBase */
static int print_usage(const char *reason = nullptr);
bool init();
int print_status() override;
private:
void Run() override;
// Publications
uORB::Publication<orb_test_s> _orb_test_pub{ORB_ID(orb_test)};
// Subscriptions
uORB::SubscriptionCallbackWorkItem _sensor_accel_sub{this, ORB_ID(sensor_accel)}; // subscription that schedules WorkItemExample when updated
uORB::SubscriptionInterval _parameter_update_sub{ORB_ID(parameter_update), 1_s}; // subscription limited to 1 Hz updates
uORB::Subscription _vehicle_status_sub{ORB_ID(vehicle_status)}; // regular subscription for additional data
// Performance (perf) counters
perf_counter_t _loop_perf{perf_alloc(PC_ELAPSED, MODULE_NAME": cycle")};
perf_counter_t _loop_interval_perf{perf_alloc(PC_INTERVAL, MODULE_NAME": interval")};
// Parameters
DEFINE_PARAMETERS(
(ParamInt<px4::params::SYS_AUTOSTART>) _param_sys_autostart, /**< example parameter */
(ParamInt<px4::params::SYS_AUTOCONFIG>) _param_sys_autoconfig /**< another parameter */
)
bool _armed{false};
};
修改仿真的编译脚本

添加如下:
CONFIG_MODULES_WORK_ITEM=y

然后执行
make px4_sitl_default gazbo
启动仿真后执行:
work_item_test start
正常的话会打印下面的信息

三、自定义串口驱动(添加一个毫米波雷达并定高)
PX4二次开发快速入门(三):自定义串口驱动
四、自定义I2C驱动(驱动一个oled显示屏)
五、自定义参数
在第一节的基础上进一步修改
添加params.c

params.c内容如下:
PARAM_DEFINE_FLOAT(PARAM_TEST1, 0.2f);
PARAM_DEFINE_INT32(PARAM_TEST2, 0);
CMakeLists.txt
px4_add_module(
MODULE modules__work_item
MAIN work_item_test
COMPILE_FLAGS
#-DDEBUG_BUILD # uncomment for PX4_DEBUG output
#-O0 # uncomment when debugging
SRCS
WorkItemTest.cpp
WorkItemTest.hpp
DEPENDS
px4_work_queue
)
Kconfig
menuconfig MODULES_WORK_ITEM
bool "work_item"
default n
---help---
Enable support for work_item
WorkItemTest.cpp
#include "WorkItemTest.hpp"
WorkItemTest::WorkItemTest() :
ModuleParams(nullptr),
ScheduledWorkItem(MODULE_NAME, px4::wq_configurations::test1)
{
}
WorkItemTest::~WorkItemTest()
{
perf_free(_loop_perf);
perf_free(_loop_interval_perf);
}
bool WorkItemTest::init()
{
ScheduleOnInterval(100000_us);
return true;
}
void WorkItemTest::Run()
{
if (should_exit()) {
ScheduleClear();
exit_and_cleanup();
return;
}
perf_begin(_loop_perf);
perf_count(_loop_interval_perf);
// Check if parameters have changed
if (_parameter_update_sub.updated()) {
// clear update
parameter_update_s param_update;
_parameter_update_sub.copy(¶m_update);
updateParams(); // update module parameters (in DEFINE_PARAMETERS)
}
double param_test1=_param_test1.get();
int param_test2=_param_test2.get();
PX4_INFO("param_test1=%lf param_test2=%d\n",param_test1,param_test2);
PX4_INFO("test workitem");
perf_end(_loop_perf);
}
int WorkItemTest::task_spawn(int argc, char *argv[])
{
WorkItemTest *instance = new WorkItemTest();
if (instance) {
_object.store(instance);
_task_id = task_id_is_work_queue;
if (instance->init()) {
return PX4_OK;
}
} else {
PX4_ERR("alloc failed");
}
delete instance;
_object.store(nullptr);
_task_id = -1;
return PX4_ERROR;
}
int WorkItemTest::print_status()
{
perf_print_counter(_loop_perf);
perf_print_counter(_loop_interval_perf);
return 0;
}
int WorkItemTest::custom_command(int argc, char *argv[])
{
return print_usage("unknown command");
}
int WorkItemTest::print_usage(const char *reason)
{
if (reason) {
PX4_WARN("%s\n", reason);
}
PRINT_MODULE_DESCRIPTION(
R"DESCR_STR(
### Description
Example of a simple module running out of a work queue.
)DESCR_STR");
PRINT_MODULE_USAGE_NAME("work_item_example", "template");
PRINT_MODULE_USAGE_COMMAND("start");
PRINT_MODULE_USAGE_DEFAULT_COMMANDS();
return 0;
}
extern "C" __EXPORT int work_item_test_main(int argc, char *argv[])
{
return WorkItemTest::main(argc, argv);
}
WorkItemTest.hpp
#pragma once
#include <px4_platform_common/defines.h>
#include <px4_platform_common/module.h>
#include <px4_platform_common/module_params.h>
#include <px4_platform_common/posix.h>
#include <px4_platform_common/px4_work_queue/ScheduledWorkItem.hpp>
#include <drivers/drv_hrt.h>
#include <lib/perf/perf_counter.h>
#include <uORB/Publication.hpp>
#include <uORB/Subscription.hpp>
#include <uORB/SubscriptionCallback.hpp>
#include <uORB/topics/orb_test.h>
#include <uORB/topics/parameter_update.h>
#include <uORB/topics/sensor_accel.h>
#include <uORB/topics/vehicle_status.h>
using namespace time_literals;
class WorkItemTest : public ModuleBase<WorkItemTest>, public ModuleParams, public px4::ScheduledWorkItem
{
public:
WorkItemTest();
~WorkItemTest() override;
/** @see ModuleBase */
static int task_spawn(int argc, char *argv[]);
/** @see ModuleBase */
static int custom_command(int argc, char *argv[]);
/** @see ModuleBase */
static int print_usage(const char *reason = nullptr);
bool init();
int print_status() override;
private:
void Run() override;
// Publications
uORB::Publication<orb_test_s> _orb_test_pub{ORB_ID(orb_test)};
// Subscriptions
uORB::SubscriptionCallbackWorkItem _sensor_accel_sub{this, ORB_ID(sensor_accel)}; // subscription that schedules WorkItemExample when updated
uORB::SubscriptionInterval _parameter_update_sub{ORB_ID(parameter_update), 1_s}; // subscription limited to 1 Hz updates
uORB::Subscription _vehicle_status_sub{ORB_ID(vehicle_status)}; // regular subscription for additional data
// Performance (perf) counters
perf_counter_t _loop_perf{perf_alloc(PC_ELAPSED, MODULE_NAME": cycle")};
perf_counter_t _loop_interval_perf{perf_alloc(PC_INTERVAL, MODULE_NAME": interval")};
// Parameters
DEFINE_PARAMETERS(
(ParamInt<px4::params::SYS_AUTOSTART>) _param_sys_autostart, /**< example parameter */
(ParamInt<px4::params::SYS_AUTOCONFIG>) _param_sys_autoconfig, /**< another parameter */
(ParamFloat<px4::params::PARAM_TEST1>) _param_test1, /**< example parameter */
(ParamInt<px4::params::PARAM_TEST2>) _param_test2 /**< another parameter */
)
bool _armed{false};
};
修改仿真的编译脚本
添加如下:
CONFIG_MODULES_WORK_ITEM=y
然后先执行(不执行这一步后面会报错)
make distclean
再执行
make parameters_metadata
最后执行
make px4_sitl_default gazbo
启动仿真后执行(注意要启动work_item_test ,不然地面站搜不到参数):
work_item_test start

如果在启动work_item_test 之前已经打开了地面站,还需要再刷新一下参数

就可以搜到添加的参数