ROS 2 话题:使用C++进行发布与订阅
ROS 2提供了一种强大而灵活的通信机制,称为话题(Topics)。话题允许节点之间进行异步消息传递,从而实现松耦合的通信模式。在本文中,我们将介绍如何使用C++编程语言在ROS 2中创建发布者和订阅者节点,以实现话题通信。
前提条件
在开始之前,请确保您已经安装了ROS 2,并且已经设置好了工作环境。如果尚未安装,请参阅ROS 2的官方安装指南。
创建一个新的ROS 2包
首先,我们需要创建一个新的ROS 2包。打开终端并导航到您的工作空间(例如~/ros2_ws/src),然后运行以下命令:
cd ~/ros2_ws/src
ros2 pkg create my_topic_package --build-type ament_cmake --dependencies rclcpp
这将创建一个名为my_topic_package的包,并包含基本的目录结构和文件。
编写C++发布者节点
1. 创建发布者节点源文件
在my_topic_package/src目录中创建一个名为publisher_node.cpp的文件,并添加以下代码:
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
class PublisherNode : public rclcpp::Node {
public:
PublisherNode() : Node("publisher_node"), count_(0) {
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&PublisherNode::timer_callback, this));
}
private:
void timer_callback() {
auto message = std_msgs::msg::String();
message.data = "Hello, ROS 2: " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
size_t count_;
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<PublisherNode>());
rclcpp::shutdown();
return 0;
}
2. 修改CMakeLists.txt
打开CMakeLists.txt文件,并添加以下内容以包含发布者节点:
find_package(std_msgs REQUIRED)
add_executable(publisher_node src/publisher_node.cpp)
ament_target_dependencies(publisher_node rclcpp std_msgs)
install(TARGETS
publisher_node
DESTINATION lib/${PROJECT_NAME})
3. 构建包
返回到工作空间的根目录,并构建包:
cd ~/ros2_ws
colcon build
4. 运行发布者节点
构建完成后,使用以下命令运行发布者节点:
source ~/ros2_ws/install/setup.bash
ros2 run my_topic_package publisher_node
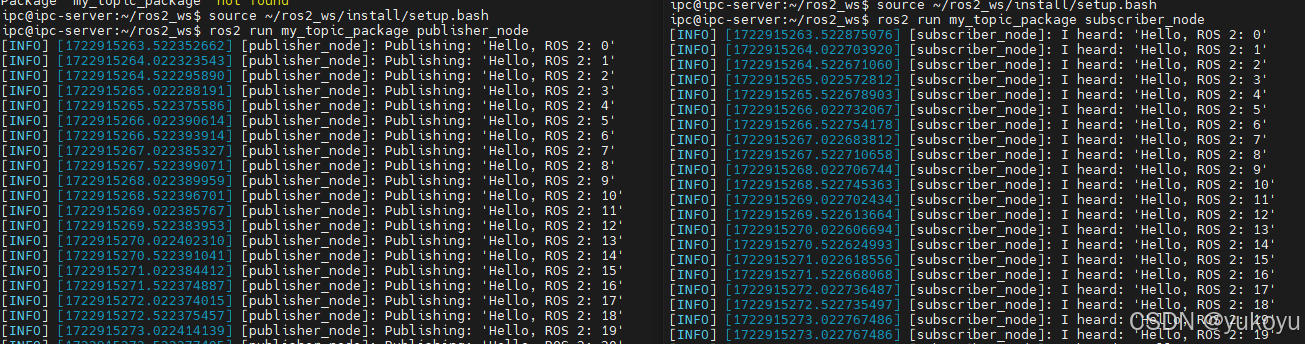
您应该会在终端中看到类似“Publishing: ‘Hello, ROS 2: 0’”的输出。
编写C++订阅者节点
1. 创建订阅者节点源文件
在my_topic_package/src目录中创建一个名为subscriber_node.cpp的文件,并添加以下代码:
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
class SubscriberNode : public rclcpp::Node {
public:
SubscriberNode() : Node("subscriber_node") {
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&SubscriberNode::topic_callback, this, std::placeholders::_1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const {
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SubscriberNode>());
rclcpp::shutdown();
return 0;
}
2. 修改CMakeLists.txt
打开CMakeLists.txt文件,并添加以下内容以包含订阅者节点:
add_executable(subscriber_node src/subscriber_node.cpp)
ament_target_dependencies(subscriber_node rclcpp std_msgs)
install(TARGETS
subscriber_node
DESTINATION lib/${PROJECT_NAME})
3. 构建包
再次返回到工作空间的根目录,并构建包:
cd ~/ros2_ws
colcon build
4. 运行订阅者节点
构建完成后,使用以下命令运行订阅者节点:
source ~/ros2_ws/install/setup.bash
ros2 run my_topic_package subscriber_node
在运行订阅者节点的终端中,您应该会看到类似“I heard: ‘Hello, ROS 2: 0’”的输出。
结论
通过本文,您已经学习了如何在ROS 2中使用C++创建发布者和订阅者节点,实现话题通信。这是ROS 2中一种基本而重要的通信机制,广泛应用于机器人开发中。掌握话题通信后,您可以进一步探索更多高级功能,如服务(Services)、动作(Actions)和参数(Parameters)。