一、 串口基本认知
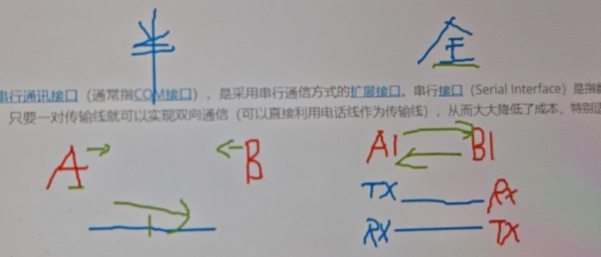
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成 本,特别适用于远距离通信,但传送速度较慢
- 是设备间接线通信的一种方式
- 数据一位一位地顺序传送
- 双向通信,全双工
-
- 半双工:只能单向通讯
- 全双工:可以双向通讯
- 传送速度相对较慢
1.1 关于电器标准和协议
串行接口按电气标准及协议来分包括RS-232-C、RS-422、RS485等。RS-232-C、RS-422与RS-485 标准只对接口的电气特性做出规定,不涉及接插件、电缆或协议。
- RS-232
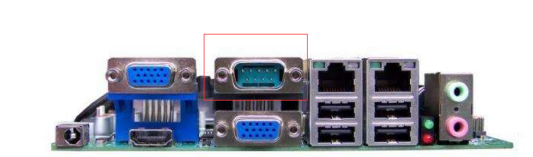
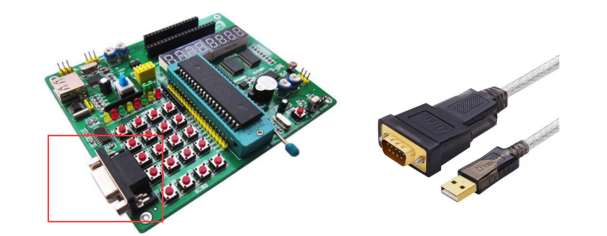
也称标准串口,最常用的一种[串行通讯接口,比如我们的电脑主机的9针串口 ,最高速率为20kb/s
RS-232是为点对点(即只用一对收、发设备)通讯而设计的,其传送距离最大为约15米。所以RS-232适合本地设备之间的通信
RS-422
由于接收器采用高输入阻抗和发送驱动器比RS232更强的驱动能力,故允许在相同传输线上连接多个接收节点,最多可接10个节点。即一个主设备(Master),其余为从设备(Slave),从设备之间不能通信,所以RS-422支持点对多的双向通信。
RS-422的最大传输距离为1219米,最大传输速率为10Mb/s。平衡双绞线的长度与传输速率成反比
RS-485
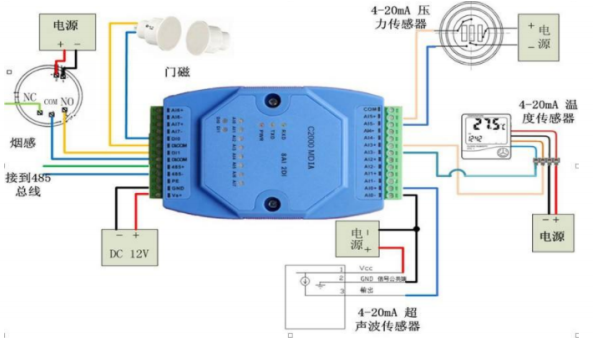
是从RS-422基础上发展而来的,无论四线还是二线连接方式总线上可多接到32个设备。
1.2 关于串口的电平
经常听说的UART
异步串行是指UART(Universal Asynchronous Receiver/Transmitter),通用异步接收/发送。
UART包含TTL电平的串口和RS232电平的串口
RS232电平
逻辑1为-3~-15V的电压, 逻辑0为3~15V的电压 (高低电平是意思)
- 笔记本通过RS232电平和单片机通信
TTL电平
TTL是Transistor-Transistor Logic,即晶体管-晶体管逻辑的简称,它是计算机处理器控制的设备内部各部分之间通信的标准技术。TTL电平信号应用广泛,是因为其数据表示采用二进制规定, +5V等价于逻辑”1”,0V等价于逻辑”0”。
数字电路中,由TTL电子元器件组成电路的电平是个电压范围,规定:
输出高电平>=2.4V,输出低电平<=0.4V;
输入高电平>=2.0V,输入低电平<=0.8V
- 笔记本电脑通过TTL电平与单片机通信
-
- TX发送线(端口)3.1
- RX接收线 (端口)3.0
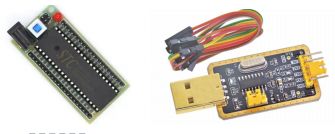
USB转TTL,使用ch340通信
1.3 串口通信
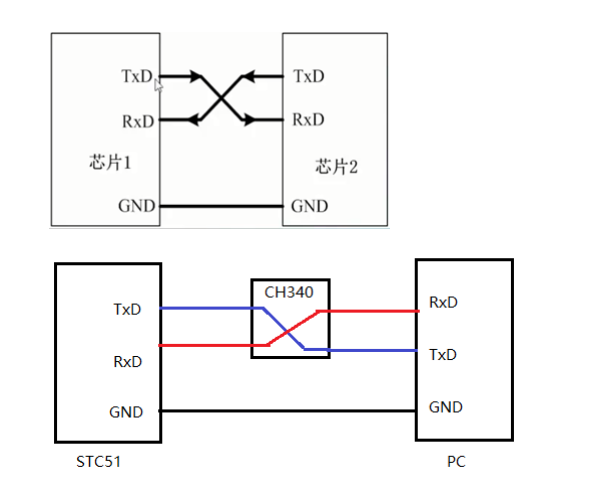
1.3.1 串口接线方式
RXD:数据输入引脚,数据接受;STC89系列对应P3.0口,上官一号有单独引出
TXD:数据发送引脚,数据发送;STC89系列对应P3.1口,上官一号有单独引出
接线方式
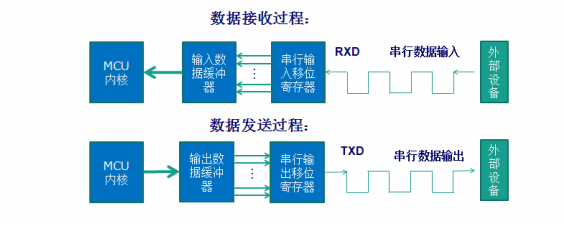
1.3.2 串口编程要素
- 印象塑造
输入/输出数据缓冲器都叫做SBUF, 都用99H地址码,但是是两个独立的8位寄存器
代码体现为: 想要接收数据 char data = SBUF 想要发送数据 SBUF = data
回忆UART是异步串行接口,通信双方使用时钟不同,因为双方硬件配置不同,但是需要约定通信速度,叫做波特率 (刘翔和我跑步)
对于电脑来说,别人做好了软件,鼠标点点点就能配置好,而苦逼单片机的波特率配置需要我们写代码
点点点配置什么,我们代码也要配置对应参数
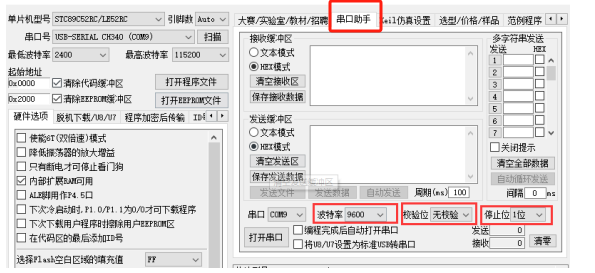
直接写代码先玩一下再学概念和数据时序
这部分内容位实操,直接看视频
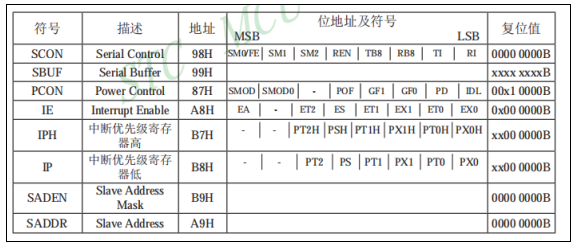
通过视频弄清楚相关寄存器的配置以及串口的工作模式
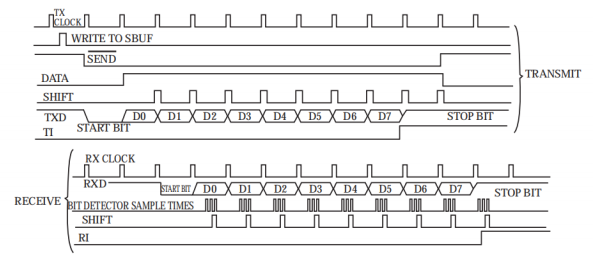
字符 'a' 是如何从单片机上传到PC的
a的ASSII码是97,16进制就是0x61, 二进制是01010001,这个8位就是数据位串口工作模式1,一帧数据有10位,起始位(0),数据位,停止位(1)
那么a的一帧数据就是 0 1000 1010 1 起始位,a的低位到高位,停止位
- 除了速度要求,还要有数据格式,双方 暗号 对上了再发数据,所以有起始位,和停止位 的概念

一个字节有8位,比如字母‘a’的ASSII码是十进制97,二进制是 0110 0001 ,一次从地位到高位发送,接收也是
1.4 编程实现
#include "reg52.h"
#include "intrins.h"
//每隔一秒给PC发送一个字符
sfr AUXR = 0x8E;
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
//8421
//0111 1111
PCON &= 0x7F; //波特率不倍速
//这行代码是为了设置波特率不倍速传输。PCON寄存器的第7位(SMOD位)为波特率倍速控制位,置0表示不倍速,即波特率按正常速度传输。
//0101 0000 0101 B7B6
SCON = 0x50; //8位数据,可变波特率
// 1100 1111 // 降低辐射
AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //清除定时器1模式位
// 0010 000 定时器1 10
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
/* 在8位自动重装模式(模式2)下,定时器1每次从TL1计数到0xFF(即256次计数),
* 然后溢出,并自动从TH1中重新装载初值。这样,定时器1就会在0xFD到0xFF之间循环计数。
* 设定TL1和TH1为0xFD,使定时器1从0xFD开始计数到0xFF,每次计数3个时钟周期(256 - 0xFD = 3)。
* 这样可以实现特定的时间间隔,用于控制串口通信的波特率。
*/
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
}
void main()
{
char data_msg = 'a';
UartInit();
while(1){
Delay1000ms();
SBUF = data_msg;
}
}- 简化
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = OX01;// 降低辐射
//0101 0000 0101 B7B6
SCON = 0x40; //8位数据,可变波特率
TMOD &= 0x0F; //清除定时器1模式位
// 0010 000 定时器1 10
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
/* 在8位自动重装模式(模式2)下,定时器1每次从TL1计数到0xFF(即256次计数),
* 然后溢出,并自动从TH1中重新装载初值。这样,定时器1就会在0xFD到0xFF之间循环计数。
* 设定TL1和TH1为0xFD,使定时器1从0xFD开始计数到0xFF,每次计数3个时钟周期(256 - 0xFD = 3)。
* 这样可以实现特定的时间间隔,用于控制串口通信的波特率。
*/
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
}
- 串口发送一个字符串
#include "reg52.h"
#include "intrins.h"
//每隔一秒给PC发送一个字符
sfr AUXR = 0x8E;
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 18;
j = 235;
do
{
while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
//8421
//0111 1111
PCON &= 0x7F; //波特率不倍速
//这行代码是为了设置波特率不倍速传输。PCON寄存器的第7位(SMOD位)为波特率倍速控制位,置0表示不倍速,即波特率按正常速度传输。
//0101 0000 0101 B7B6
SCON = 0x50; //8位数据,可变波特率 配置串口工作模式
//1100 1111
AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //清除定时器1模式位
// 0010 000 定时器1 10模式
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
/* 在8位自动重装模式(模式2)下,定时器1每次从TL1计数到0xFF(即256次计数),
* 然后溢出,并自动从TH1中重新装载初值。这样,定时器1就会在0xFD到0xFF之间循环计数。
* 设定TL1和TH1为0xFD,使定时器1从0xFD开始计数到0xFF,每次计数3个时钟周期(256 - 0xFD = 3)。
* 这样可以实现特定的时间间隔,用于控制串口通信的波特率。
*/
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
}
void sendByte(char date_msg)
{
SBUF = date_msg;
while(!TI);
TI =0;
}
void sendString(char* str)
{
while(*str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
//char data_msg = 'a';
UartInit();
while(1){
Delay1000ms();
sendString("hellod World\r\n");
}
}在代码中,SBUF = date_msg; 和 while(!TI); TI = 0; 这两行的作用是通过串口发送一个字节的数据,并等待发送完成。具体解释如下:
SBUF = date_msg;
-
SBUF是串口数据缓冲寄存器。将date_msg的值写入SBUF寄存器,表示将要通过串口发送这个字节数据。
while(!TI);
-
TI是串口发送中断标志位(Transmit Interrupt flag)。当发送缓冲区中的数据被移位寄存器取走并发送完成时,硬件自动将TI置1,表示发送完成。while(!TI);表示等待TI被置1,即等待当前字节的数据发送完成。如果TI为0,则等待(忙等待)。
TI = 0;
-
- 将
TI置0,以便下次发送时能够再次检测到发送完成状态。
- 将
这段代码的延时作用在于确保在发送下一个字节之前,当前字节已经通过串口发送完毕,避免数据冲突和丢失。也就是说,while(!TI); 是一种同步机制,确保串口发送数据的顺序和完整性。
-
- 串口中断
#include "reg52.h"
#include "intrins.h"
//每隔一秒给PC发送一个字符
sfr AUXR = 0x8E;
sbit D5 = P3^7;
char cmd;
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 18;
j = 235;
do
{
while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
//8421
//0111 1111
PCON &= 0x7F; //波特率不倍速
//这行代码是为了设置波特率不倍速传输。PCON寄存器的第7位(SMOD位)为波特率倍速控制位,置0表示不倍速,即波特率按正常速度传输。
//0101 0000 0101 B7B6
SCON = 0x50; //8位数据,可变波特率 配置串口工作模式 REN使能接收
//1100 1111
AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //清除定时器1模式位
// 0010 000 定时器1 10模式
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
/* 在8位自动重装模式(模式2)下,定时器1每次从TL1计数到0xFF(即256次计数),
* 然后溢出,并自动从TH1中重新装载初值。这样,定时器1就会在0xFD到0xFF之间循环计数。
* 设定TL1和TH1为0xFD,使定时器1从0xFD开始计数到0xFF,每次计数3个时钟周期(256 - 0xFD = 3)。
* 这样可以实现特定的时间间隔,用于控制串口通信的波特率。
*/
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
ES = 1; // 开启串口中断
EA = 1; // 开启总中断
}
void sendByte(char date_msg)
{
SBUF = date_msg;
while(!TI); // 发送 TI 接收RI
TI =0;
}
void sendString(char* str)
{
while(*str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
//char data_msg = 'a';
D5 = 1; //默认高电压
UartInit();
while(1){
Delay1000ms();
//往发送缓冲区写入数据,就完成数据的发送
sendString("hellod World\r\n");
}
}
void Uart_Handler() interrupt 4
{
if(RI)
{ //中断处理函数中,对于接收中断的响应
RI = 0; //清除接收中断标志位
cmd = SBUF;
if(cmd == 'O'){
D5 = 0; //点亮 D5
}
if(cmd == 'C'){
D5 = 1; //熄灭 D5
}
}
if(TI);
}- 字符串作比较
#include "reg52.h"
#include "intrins.h"
#include <string.h>
//每隔一秒给PC发送一个字符
#define SIZE 12
sfr AUXR = 0x8E;
sbit D5 = P3^7;
char cmd[SIZE];
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 18;
j = 235;
do
{
while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
//8421
//0111 1111
PCON &= 0x7F; //波特率不倍速
//这行代码是为了设置波特率不倍速传输。PCON寄存器的第7位(SMOD位)为波特率倍速控制位,置0表示不倍速,即波特率按正常速度传输。
//0101 0000 0101 B7B6
SCON = 0x50; //8位数据,可变波特率 配置串口工作模式 REN使能接收
//1100 1111
AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //清除定时器1模式位
// 0010 000 定时器1 10模式
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
/* 在8位自动重装模式(模式2)下,定时器1每次从TL1计数到0xFF(即256次计数),
* 然后溢出,并自动从TH1中重新装载初值。这样,定时器1就会在0xFD到0xFF之间循环计数。
* 设定TL1和TH1为0xFD,使定时器1从0xFD开始计数到0xFF,每次计数3个时钟周期(256 - 0xFD = 3)。
* 这样可以实现特定的时间间隔,用于控制串口通信的波特率。
*/
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
ES = 1; // 开启串口中断
EA = 1; // 开启总中断
}
void sendByte(char date_msg)
{
SBUF = date_msg;
while(!TI); // 发送 TI 接收RI
TI =0;
}
void sendString(char* str)
{
while(*str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
//char data_msg = 'a';
D5 = 1; //默认高电压
UartInit();
while(1){
Delay1000ms();
//往发送缓冲区写入数据,就完成数据的发送
sendString("hellod World\r\n");
}
}
void Uart_Handler() interrupt 4
{
static int i = 0; //静态的局部变量,只被函数初始化调用一次
if(RI)
{ //中断处理函数中,对于接收中断的响应
RI = 0; //清除接收中断标志位
cmd[i] = SBUF;
i++;
if(i == SIZE){
i = 0
}
if(strstr(cmd,"op")){ // strcmp 比较
D5 = 0; //点亮 D5
i = 0;
memset(cmd,'\0',SIZE);
}
if(strstr(cmd,"cl")){
D5 = 1; //熄灭 D5
i = 0;
memset(cmd,'\0',SIZE);
}
}
if(TI);
}- 串口的协议
- 波特率:10位 1位起始位,8位数据位,1位停止位
字符‘a’,阿斯克码表:97 十六进制为:61 二进制:0110 0001 (起+数据位+停止位 )
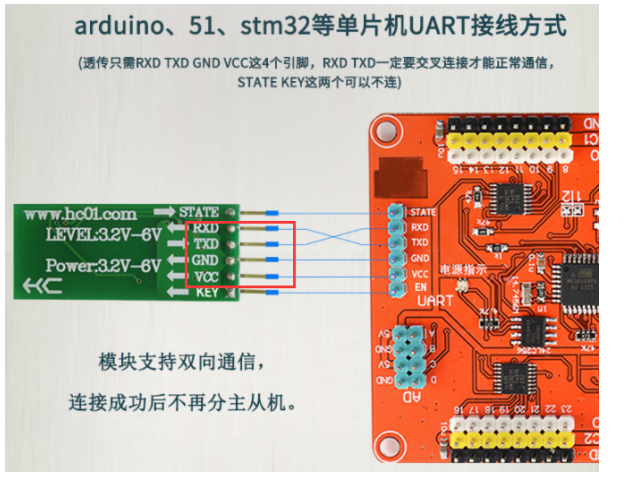
二、 蓝牙模块
蓝牙模块,又叫做蓝牙串口模块
串口透传技术
透传即透明传送,是指在数据的传输过程中,通过无线的方式这组数据不发生任何形式的改变,仿佛传输过程是透明的一样,同时保证传输的质量,原封不动地到了最终接收者手里。
以太网,蓝牙,Zigbee, GPRS 等模块玩法一样,对嵌入式程序员来说,不需要关心通讯模块内部数据及协议栈工作原理,只要通过串口编程获得数据即可
2.1 Wifi模块-ESP-01s
蓝牙,ESP-01s,Zigbee, NB-Iot等通信模块都是基于AT指令的设计
2.1.1 AT指令
简介
AT指令集是从终端设备(Terminal Equipment,TE)或数据终端设备(Data Terminal Equipment,DTE)向终端适配器(Terminal Adapter,TA)或数据电路终端设备(Data Circuit Terminal Equipment,DCE)发送的。
其对所传输的数据包大小有定义:即对于AT指令的发送,除AT两个字符外,最多可以接收1056个字符的长度(包括最后的空字符)。
每个AT命令行中只能包含一条AT指令;对于由终端设备主动向PC端报告的URC指示或者response 响应,也要求一行最多有一个,不允许上报的一行中有多条指示或者响应。AT指令以回车作为结尾,响应或上报以回车换行为结尾。
2.1.2 初始配置和验证
ESP-01s出厂波特率正常是115200, 注意:AT指令,控制类都要加回车,数据传输时不加回车
- 上电后,通过串口输出一串系统开机信息,购买的部分模块可能电压不稳,导致乱码,以 ready 为准
- 上电后发送AT指令测试通信及模块功能是否正常
AT
OK- 通过一下命令配置成9600波特率
AT+UART=9600,8,1,0,02.1.3 入网设置
- 设置工作模式
AT+CWMODE=3 //1. 是station(设备)模式 2.是AP(路由)模式 3.是双模
OK- 以设备模式接入家中路由器配置
AT+CWJAP="301","IG301666"//指令
WIFI CONNECTED //结果
WIFI GOT IP //结果- 查询IP地址
AT+CIFSR //指令
+CIFSR:APIP,"192.168.4.1"
+CIFSR:APMAC,"4e:75:25:0d:ae:2f"
+CIFSR:STAIP,"192.168.0.148"
+CIFSR:STAMAC,"4c:75:25:0d:ae:2f"
Ok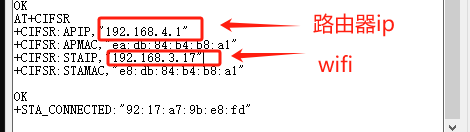
2.1.4 连接到 TCP server
- 开关网络助手,设立TCP服务器
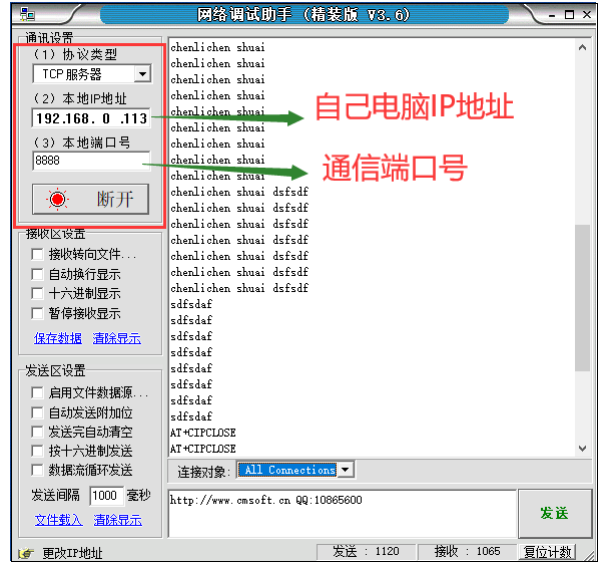
1. 连接服务器
AT+CIPSTART="TCP","192.168.3.13",8880 //指令,注意双引号逗号都要半角(英文)输入
CONNECT //结果:成功
OK /2. 发送数据
AT+CIPSEND=4 // 设置即将发送数据的长度 (这里是4个字节)
>CLCA // 看到大于号后,输入消息,CLCA,不要带回车
Response :SEND OK //结果:成功
//注意,这种情况下,每次发送前都要先发送AT+CIPSEND=长度 的指令,再发数据!
2.1.5 透传
上一节每次发送数据都要进行字符长度设定,如果设置成透传,就有点像蓝牙模块的玩法
AT+CIPMODE=1 //开启透传模式
Response :OK
AT+CIPSEND //带回车
Response: > //这个时候随意发送接收数据咯退出透传模式
//在透传发送数据过程中,若识别到单独的⼀包数据 “+++”,则退出透传发送
2.1.6 单片机帮你做这一切
- AT指令
#include "reg52.h"
#include "intrins.h"
#include <string.h>
#define SIZE 12
sfr AUXR = 0x8E;
sbit D5 = P3^7;
char cmd[SIZE];
// code 指定字符存储位置,以防存储空间过大
code char LJWL[] = "AT+CWJAP=\"123\",\"123456789\"\r\n";
code char LJFWQ[] = "AT+CIPSTART=\"TCP\",\"192.168.164.25\",8888\r\n";
char TCMS[] = "AT+CIPMODE=1\r\n";
char SJCS[] = "AT+CIPSEND\r\n";
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x50; //配置串口工作方式1,REN使能接收
TMOD &= 0x0F;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
EA = 1;//开启总中断
ES = 1;//开启串口中断
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
D5 = 1;
//配置C51串口的通信方式
UartInit();
while(1){
//Delay1000ms();
//往发送缓冲区写入数据,就完成数据的发送
//sendString("lxl shuai\r\n");
sendString(LJWL);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(LJFWQ);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(TCMS);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(SJCS);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
}
}
void Uart_Handler() interrupt 4
{
static int i = 0;//静态变量,被初始化一次
if(RI)//中断处理函数中,对于接收中断的响应
{
RI = 0;//清除接收中断标志位
cmd[i] = SBUF;
i++;
if(i == SIZE){
i = 0;
}
if(strstr(cmd,"en")){
D5 = 0;//点亮D5
i = 0;
memset(cmd,'\0',SIZE);
}
if(strstr(cmd,"se")){
D5 = 1;//熄灭D5
i = 0;
memset(cmd,'\0',SIZE);
}
}
if(TI);
}- 通过TCP通信点灯
#include "reg52.h"
#include "intrins.h"
#include <string.h>
#define SIZE 12
sfr AUXR = 0x8E;
sbit D5 = P3^7;
char cmd[SIZE];
code char LJWL[] = "AT+CWJAP=\"123\",\"123456789\"\r\n";
code char LJFWQ[] = "AT+CIPSTART=\"TCP\",\"192.168.164.25\",8888\r\n";
char TCMS[] = "AT+CIPMODE=1\r\n";
char SJCS[] = "AT+CIPSEND\r\n";
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x50; //配置串口工作方式1,REN使能接收
TMOD &= 0x0F;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
EA = 1;//开启总中断
ES = 1;//开启串口中断
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
int mark = 0;
D5 = 1;
//配置C51串口的通信方式
UartInit();
while(1){
//Delay1000ms();
//往发送缓冲区写入数据,就完成数据的发送
//sendString("chenlichen shuai\r\n");
if(mark == 0){
sendString(LJWL);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(LJFWQ);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(TCMS);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
sendString(SJCS);
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
Delay1000ms();
mark = 1;
}else{
sendString("lxl shuai\r\n");
Delay1000ms();
}
}
}
void Uart_Handler() interrupt 4
{
static int i = 0;//静态变量,被初始化一次
if(RI)//中断处理函数中,对于接收中断的响应
{
RI = 0;//清除接收中断标志位
cmd[0] = SBUF;
if(cmd[0] == '1'){
D5 = 0;//点亮D5
}
if(cmd[0] == '0'){
D5 = 1;//熄灭D5
}
}
if(TI);
}注意:有时间发送AT指令,会出现错误。连接不上服务器。IP会连不上。
优化连接过程
#include "reg52.h"
#include "intrins.h"
#include <string.h>
#define SIZE 12
sfr AUXR = 0x8E;
sbit D5 = P3^7;
sbit D6 = P3^6;
char buffer[SIZE];
code char LJWL[] = "AT+CWJAP=\"123\",\"123456789\"\r\n"; //入网指令
code char LJFWQ[] = "AT+CIPSTART=\"TCP\",\"192.168.164.25\",8888\r\n"; //连接服务器指令
char TCMS[] = "AT+CIPMODE=1\r\n"; //透传指令
char SJCS[] = "AT+CIPSEND\r\n"; //数据传输开始指令
char RESET[] = "AT+RST\r\n"; //重启模块指令
char AT_OK_Flag = 0; //OK返回值的标志位
char AT_Connect_Net_Flag = 0; //WIFI GOT IP返回值的标志位
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x50; //配置串口工作方式1,REN使能接收
TMOD &= 0x0F;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
EA = 1;//开启总中断
ES = 1;//开启串口中断
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
void main()
{
int mark = 0;
D5 = D6 = 1;//灭状态灯
//配置C51串口的通信方式
UartInit();
Delay1000ms();//给espwifi模块上电时间
//发送联网AT指令并等待成功
sendString(LJWL); // 连接wifi
//while(!AT_Connect_Net_Flag);
while(!AT_OK_Flag);
AT_OK_Flag = 0;
//发送连服务器指令并等待成功
sendString(LJFWQ); // 连接服务器
while(!AT_OK_Flag);
AT_OK_Flag = 0;
//发送透传模式指令并等待成功
sendString(TCMS); //透传指令
while(!AT_OK_Flag);
AT_OK_Flag = 0;
//发送数据传输指令并等待成功
sendString(SJCS); //发送数据传输
while(!AT_OK_Flag);
if(AT_Connect_Net_Flag){
D5 = 0;//点亮D5,代表入网成功
}
if(AT_OK_Flag){
D6 = 0;//点亮D6,代表连接服务器并打开透传模式成功
}
while(1){
Delay1000ms();
//“心跳包”
sendString("lxl shuai\r\n");
}
}
void Uart_Handler() interrupt 4
{
static int i = 0;//静态变量,被初始化一次
char tmp;
if(RI)//中断处理函数中,对于接收中断的响应
{
RI = 0;//清除接收中断标志位
tmp = SBUF;
if(tmp == 'W' || tmp == 'O' || tmp == 'L' || tmp == 'F'){
i = 0;
}
buffer[i++] = tmp;
//入网成功的判断依据WIFI GOT IP
if(buffer[0] == 'W' && buffer[5] == 'G'){
AT_Connect_Net_Flag = 1;
memset(buffer, '\0', SIZE);
}
//连接服务器等OK返回值指令的判断
if(buffer[0] == 'O' && buffer[1] == 'K'){
AT_OK_Flag = 1;
memset(buffer, '\0', SIZE);
}
//联网失败出现FAIL字样捕获 重启模块
if(buffer[0] == 'F' && buffer[1] == 'A'){
for(i=0;i<5;i++){
D5 = 0;
Delay1000ms();
D5 = 1;
Delay1000ms();
}
sendString(RESET);
memset(buffer, '\0', SIZE);
}
//灯控指令
if(buffer[0] == 'L' && buffer[2] == '1'){
D5 = 0;//点亮D5
memset(buffer, '\0', SIZE);
}
if(buffer[0] == 'L' && buffer[2] == '0'){
D5 = 1;//熄灭D5
memset(buffer, '\0', SIZE);
}
if(i == 12) i = 0;
}
}3.5. 7 ESP-01s当服务器
USB转TTL插入电脑,TX--RX RX-TX VCC-3.3V GDN-GND
查询IP地址:AT+CIFSR\
//1 配置成双模
AT+CWMODE=2
Response :OK
//2 使能多链接
AT+CIPMUX=1
Response :OK
//3 建立TCPServer
AT+CIPSERVER=1 // default port = 333
Response :OK
//4 发送数据
AT+CIPSEND=0,4 // 发送4个字节在连接0通道上
>abcd //输入数据,不带回车
Response :SEND OK
//• 接收数据
+IPD, 0, n: xxxxxxxxxx //+IPD是固定字符串 0是通道,n是数据长度,xxx是数据
//断开连接
AT+CIPCLOSE=0
Response :0, CLOSED OK
//ESP-01s工作在路由模式,课程查询路由器IP地址192.168.4.1,使用的服务器默认端口号333
//ESP-01s收到收到数据op/cl给上官一号,实现D6led的亮/灭
#include "reg52.h" // 包含reg52.h头文件,定义51系列单片机的特殊功能寄存器
#include "intrins.h" // 包含intrins.h头文件,定义_nop_()等内联汇编函数
#include <string.h> // 包含string.h头文件,用于字符串操作
#define SIZE 12 // 定义缓冲区大小为12
sfr AUXR = 0x8E; // 定义特殊功能寄存器AUXR的地址
sbit D5 = P3^7; // 定义D5为P3端口的第7位
sbit D6 = P3^6; // 定义D6为P3端口的第6位
char buffer[SIZE]; // 定义一个字符数组buffer,大小为SIZE
// 一些AT命令字符串
char LYMO[] = "AT+CWMODE=2\r\n"; // 设置工作在路由模式
char DLJ[] = "AT+CIPMUX=1\r\n"; // 使能多链接
char JLFW[] = "AT+CIPSERVER=1\r\n"; // 建立TCP服务器,默认端口333
char FSSJ[] = "AT+CIPSEND=0,5\r\n"; // 发送数据指令
// 标志位,用于记录不同的状态
char AT_OK_Flag = 0; // OK返回值的标志位
char AT_Connect_Net_Flag = 0; // WIFI GOT IP返回值的标志位
char Client_Connect_Flag = 0; // 客户端连接标志位
// 初始化串口,波特率9600bps@11.0592MHz
void UartInit(void)
{
AUXR = 0x01; // 设置定时器1的工作模式
SCON = 0x50; // 设置串口工作方式1,REN使能接收
TMOD &= 0xF0; // 清除定时器1的工作模式位
TMOD |= 0x20; // 设置定时器1为8位自动重装模式
TH1 = 0xFD; // 设置定时器1初值,波特率9600
TL1 = 0xFD;
TR1 = 1; // 启动定时器1
EA = 1; // 开启总中断
ES = 1; // 开启串口中断
}
// 延时1000毫秒
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
// 发送一个字节数据
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
// 发送字符串
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
// 主函数
void main()
{
int mark = 0;
D5 = D6 = 1; // 熄灭状态灯
UartInit(); // 配置串口通信方式
Delay1000ms(); // 给ESP8266模块上电时间
sendString(LYMO); // 发送设置路由模式命令
while(!AT_OK_Flag); // 等待OK返回
AT_OK_Flag = 0;
sendString(DLJ); // 发送使能多链接命令
while(!AT_OK_Flag); // 等待OK返回
AT_OK_Flag = 0;
sendString(JLFW); // 发送建立TCP服务器命令
while(!Client_Connect_Flag); // 等待客户端连接
AT_OK_Flag = 0;
if(Client_Connect_Flag){
D5 = 0; // 点亮D5,表示有客户端接入
D6 = 0;
}
while(1){
sendString(FSSJ); // 发送发送数据指令
Delay1000ms();
Delay1000ms();
sendString("Hello"); // 发送数据
Delay1000ms();
Delay1000ms();
}
}
// 串口中断处理函数
void Uart_Handler() interrupt 4
{
static int i = 0; // 静态变量i,只初始化一次
char tmp;
if(RI) // 接收中断处理
{
RI = 0; // 清除接收中断标志位
tmp = SBUF; // 读取接收到的数据
if(tmp == 'W' || tmp == 'O' || tmp == 'L' || tmp == '0' || tmp == ':'){
i = 0; // 如果接收到特定字符,重置缓冲区索引
}
buffer[i++] = tmp; // 将接收到的数据存入缓冲区
if(buffer[0] == 'W' && buffer[5] == 'G'){
AT_Connect_Net_Flag = 1; // 判断是否收到"WIFI GOT IP"
memset(buffer, '\0', SIZE); // 清空缓冲区
}
if(buffer[0] == 'O' && buffer[1] == 'K'){
AT_OK_Flag = 1; // 判断是否收到"OK"
memset(buffer, '\0', SIZE); // 清空缓冲区
}
if(buffer[0] == '0' && buffer[2] == 'C'){
Client_Connect_Flag = 1; // 判断是否收到客户端连接
memset(buffer, '\0', SIZE); // 清空缓冲区
}
if(buffer[0] == ':' && buffer[1] == 'o' && buffer[2] == 'p'){
D5 = 0; // 点亮D5
memset(buffer, '\0', SIZE); // 清空缓冲区
}
if(buffer[0] == ':' && buffer[1] == 'c' && buffer[2] == 'l'){
D5 = 1; // 熄灭D5
memset(buffer, '\0', SIZE); // 清空缓冲区
}
if(i == 12) i = 0; // 如果缓冲区满了,重置索引
}
}
代码功能解释
- 头文件和宏定义:
-
- 包含
reg52.h和intrins.h头文件,定义了一些必要的寄存器和内联函数。 - 使用
#define SIZE 12定义缓冲区大小为12。
- 包含
- 全局变量和AT命令字符串:
-
- 定义了一些全局变量和AT命令字符串,用于配置ESP8266模块。
- 串口初始化函数
UartInit:
-
- 配置51单片机的串口,设置波特率为9600bps,并启用串口中断。
- 延时函数
Delay1000ms:
-
- 实现了一个大约1000毫秒的延时函数。
- 发送数据函数
sendByte和sendString:
-
sendByte:发送一个字节的数据。sendString:发送一个字符串。
- 主函数
main:
-
- 初始化串口,并配置ESP8266模块为路由模式、多链接模式和建立TCP服务器。
- 在有客户端连接后,点亮指示灯并不断发送数据。
- 串口中断处理函数
Uart_Handler:
-
- 处理接收到的数据,根据不同的返回值设置相应的标志位,并根据特定指令控制指示灯的状态。