文章目录
- 1. 超声波基本概念
- 1.1 声波的频率与分类
- 1.2 超声波的波速和波长
- 1.3 超声波的指向性
- 1.4 超声波的反射和折射
- 1.5 超声波的衰减
- 1.6 超声波产生的效应
- 2. 超声波传感器原理及传感器分类
- 2.1 超声波传感器原理
- 2.2 压电式超声波传感器
- 2.3 磁致伸缩式超声波传感器
- 2.4 超声波传感器的结构
- 2.5 主要性能指标
- 2.6 超声波传感器的工作原理
- 2.7 超声波传感器的优缺点
- 3. 超声波传感器相关技术及应用
- 3.1 超声波传感器抗干扰技术
- 3.2 超声波传感器扇形扫描探测
- 3.3 超声波雷达的技术参数
- 3.4 超声波雷达在自动驾驶中的应用
- 3.4.1 自动泊车
- 3.4.2 远程遥控泊车
- 3.4.3 自学习泊车
- 3.4.4 自动代客泊车
- 声明
1. 超声波基本概念
1.1 声波的频率与分类
❑ 声波是声音的传播形式。声波是一种机械波,由物体振动产生,借助各种介质向四面八方传播。
❑ 按声波的频率,声波分为次声波、可闻声波和超声波。
❖ 频率在20Hz以下的声波称为次声波;
❖ 频率在20kHz以上的声波称为超声波;
❖ 20Hz~20kHz频率范围的声音是人耳可听到的声音称为可闻声波。
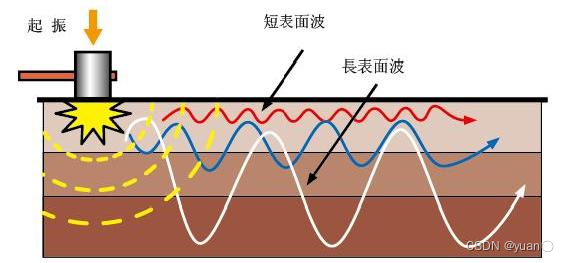
声波的波形分类:纵波、横波、表面波。
- 纵波:振动方向和波的传播方向一致。能在固体、液体和气体中传播。
- 横波:振动方向和波的传播方向垂直。只能在固体中传播。
- 表面波:能量集中于表面附近的弹性波。地震学、天文学、雷达通信及广播电视中的信号处理、航空航天、石油勘探和无损检测等。
1.2 超声波的波速和波长
声波的传播速度取决于介质的密度及声阻抗。
声阻抗是描述介质传播声波特性的一个物理量。介质的声阻抗
Z
Z
Z等于介质的密度
ρ
ρ
ρ和声速
c
c
c的乘积:
Z
=
ρ
c
Z = \rho c
Z=ρc 声波的传播速度还与温度有关,考虑到环境温度对超声波传播速度的影响,通过温度补偿的方法对传播速度予以校正。以空气而言,其计算公式为:
c
0
=
331.6
+
0.61
T
{c_0} = 331.6 + 0.61T
c0=331.6+0.61T 温度越高,声速越快。
超声波的波长等于声速除以频率,即
λ
=
c
/
f
λ=c/f
λ=c/f。超声波在各种介质中的传播速度有所不同,远低于电磁波的传播速度(3×108m/s)。其波长短时与普通光类似,小型声源可得到锐方向性的波束,方位分辨率也很高。
若超声波垂直入射在两种声阻抗不同的分界面上,则要产生反射波与透射波,反射率=反射波声压/入射波声压。超声波对于空气与液体、空气与固体间的反射率为100%。
1.3 超声波的指向性
超声波声源发出的超声波束以一定的角度逐渐向外扩散, 指向角
θ
θ
θ(单位为
r
a
d
rad
rad)与超声源的直径D以及波长λ之间的关系为:
sin
θ
=
1.22
λ
D
\sin \theta = 1.22\frac{\lambda }{D}
sinθ=1.22Dλ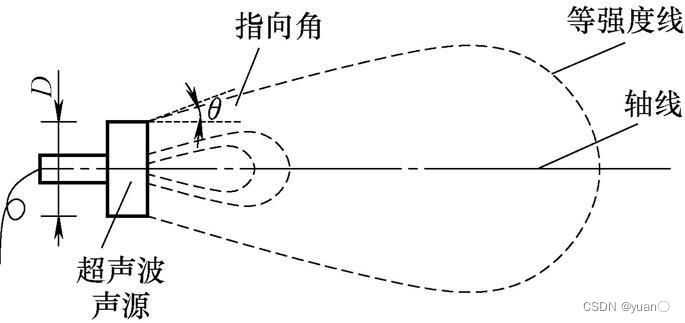 在声束横截面的中心轴线上,超声波最强,且随着指向角的增大而减小。
在声束横截面的中心轴线上,超声波最强,且随着指向角的增大而减小。
1.4 超声波的反射和折射

反射定律
sin
α
sin
α
′
=
c
1
c
′
1
\frac{{\sin \alpha }}{{\sin \alpha '}} = \frac{{{c_1}}}{{{{c'}_1}}}
sinα′sinα=c′1c1当波速一致时,
α
=
α
′
\alpha = \alpha '
α=α′
折射定律
sin
α
sin
β
=
c
1
c
2
\frac{{\sin \alpha }}{{\sin \beta }} = \frac{{{c_1}}}{{{c_2}}}
sinβsinα=c2c1
c
1
c_1
c1—入射声波速;
c
2
c_2
c2—折射声波速
1.5 超声波的衰减
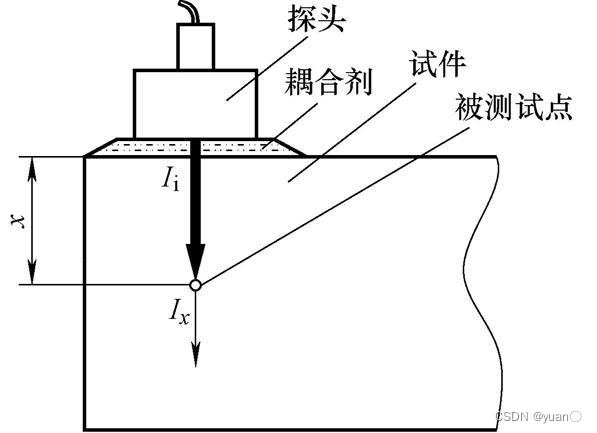 超声波在介质中传播时,随传播距离的增加,能量逐渐衰减。其声强的衰减规律满足以下函数关系:
I
x
=
I
i
e
−
2
k
x
{I_x} = {I_i}{e^{ - 2kx}}
Ix=Iie−2kx
I
i
I_i
Ii——超声波进入介质时的声强;
超声波在介质中传播时,随传播距离的增加,能量逐渐衰减。其声强的衰减规律满足以下函数关系:
I
x
=
I
i
e
−
2
k
x
{I_x} = {I_i}{e^{ - 2kx}}
Ix=Iie−2kx
I
i
I_i
Ii——超声波进入介质时的声强;
I
x
I_x
Ix——通过一定距离x衰减后的声强;
k
k
k——衰减系数,单位为奈培/厘米。
1.6 超声波产生的效应
超声波在超声场中传播时,会对超声场产生如下几种效应。
- 机械效应。超声波在传播过程中,会引起介质质点交替地压缩与伸 张,构成了压力的变化,这种压力的变化将引起机械效应。
- 空化效应。液体中的微气泡(空化核)在声场的作用下振动,当声压达 到一定值时,气泡将迅速膨胀,突然闭合时产生冲击波。
- 热效应。超声波的振动会使介质产生强烈的高频振荡,介质间相互 摩擦而发热,这种能量会使液体、固体的温度升高。
2. 超声波传感器原理及传感器分类
2.1 超声波传感器原理
超声波传感器主要由发射器、接收器和控制部分等构成,也称超声波探头、超声波换能器,发射器和接收器用于超声波的发射与接收。
按工作原理分类,超声波传感器分为压电式、磁致伸缩式、电磁式等形式。其中,压电式换能器最为常见,材料主要是压电晶体和压电陶瓷。目前,铁电陶瓷是应用最广泛的带压电效应的材料。
2.2 压电式超声波传感器
工作原理:在压电材料切片上施加交变电压,使其产生电致伸缩振动,而产生超声波。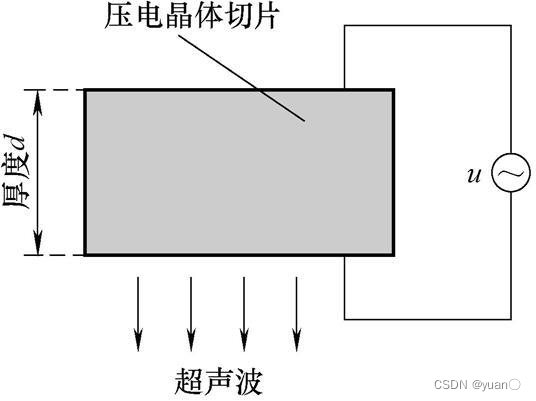
压电材料的固有频率与晶体切片的厚度
d
d
d有关
f
=
n
c
2
d
c
=
E
ρ
\begin{array}{l}f = n\frac{c}{{2d}}\\c = \sqrt {\frac{E}{\rho }} \end{array}
f=n2dcc=ρE
n
n
n——谐波级数;
E
E
E ——材料密度
c
c
c——传播速度;
E
E
E ——杨氏模量
2.3 磁致伸缩式超声波传感器
工作原理:铁磁材料在交变的磁场中沿着磁场方向产生伸缩的现象,叫做磁致伸缩效应。其利用磁致伸缩效应工作。
- 发射器是把铁磁材料置于交变磁场中,使它产生机械尺寸的交变化,即机械振动,从而产生超声波。
- 接收器是利用磁致伸缩的逆效应而制成的,超声波作用在磁致伸缩材料上时,将产生感应电动势。
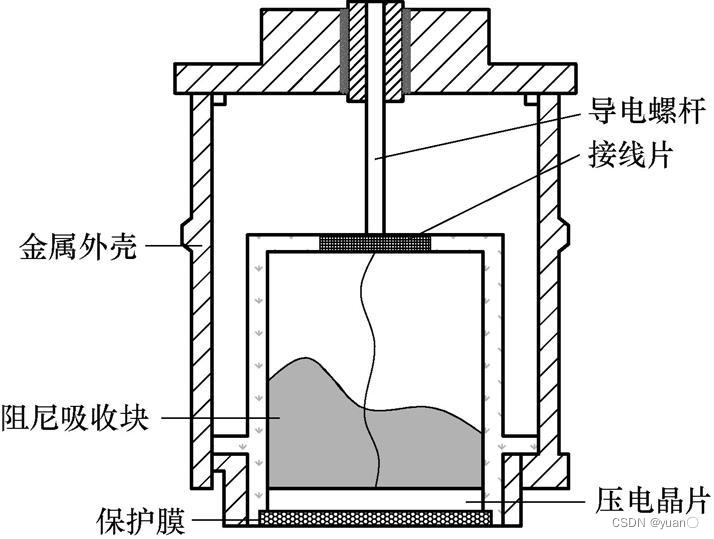
2.4 超声波传感器的结构
超声波传感器有许多不同的结构,可分为直探头(纵波)斜探头(横波)、表面波探头(表面波)、兰姆波探头(兰姆波)、双探头(一个探头反射、一个探头接收)等。
2.5 主要性能指标
- 工作频率,就是压电晶片的共振频率。当加到它两端的交流电压的频率和晶片的共振频率相等时,输出的能量最大,灵敏度也最高。
- 工作温度,由于压电材料的居里点一般比较高,特别是诊断用超声波探头使用,功率较小,所以工作温度比较低,可以长时间地工作而不失效。医疗用的超声探头的温度比较高,需要单独的制冷设备。
- 灵敏度,主要取决于制造晶片本身。机电耦合系数大,灵敏度高;反之,灵敏度低。
2.6 超声波传感器的工作原理
基本原理:利用某种待测的非声量与某些描述媒质声学特性的超声量之间存在着的直接或间接的关系。
测量对象:密度、流量、液位、厚度、缺陷等

超声波具有频率高,波长短,定向传播性好的特性。
超声波雷达由发射头(器)、接收头(器)、数据线和拔码开关组成,如图所示。发射头和接收头安装在同一面上,在有效的检测距离内,发射头发射特定频率的超声波,遇到检测面反射部分超声波;接收头接收返回的超声波,由芯片记录声波的往返时间,并计算出距离值;数据线将数据传输给控制单元。 设超声波到反射物表面的距离为
L
L
L,超声在空气中的传播速度为
v
v
v(约为340m), 从发射到接收所需的传播时间为,当发射头和接收头之间的距离远小于超声波到反射物之间的距离时,则有
L
=
v
t
/
2
L=vt/2
L=vt/2。只要能测出传播时间,即可求出测量距离。
设超声波到反射物表面的距离为
L
L
L,超声在空气中的传播速度为
v
v
v(约为340m), 从发射到接收所需的传播时间为,当发射头和接收头之间的距离远小于超声波到反射物之间的距离时,则有
L
=
v
t
/
2
L=vt/2
L=vt/2。只要能测出传播时间,即可求出测量距离。
2.7 超声波传感器的优缺点
超声波雷达的优点
❖ 超声波雷达的频率都相对固定,如车用超声波雷达,频率40kHz。
❖ 超声波雷达结构简单,体积小,成本低,信息处理简单可靠,易于小型化与集成化,并且可以进行实时控制。
❖ 超声波雷达灵敏度较高。
❖ 超声波雷达抗环境干扰能力强,对天气变化不敏感。
❖ 超声波雷达可在室内、黑暗中使用。
超声波雷达的缺点
❖ 超声波雷达适合于低速,在高速情况下测量距离具有一定的局限性。
❖ 超声波有一定的扩散角,只能测距,不能测量方位,只能在低速时使用,须在汽车前、后保险杠不同方位上安装多个超声波雷达。
❖ 对于低矮、圆锥、过细的障碍物或者沟坎,超声波雷达不易测到。
❖ 普通超声波雷达的探测盲区内,系统无法探测到障碍物。比较好的解决办法是在安装超声波雷达的同时安装摄像头。
3. 超声波传感器相关技术及应用
3.1 超声波传感器抗干扰技术
无人车倒车雷达系统中,超声波传感器发射和接收都是40kHz的超声波信号,在实际使用环境空间中会存在同频或者是倍频发射的信号,如处理不当导致误判,影响系统正常工作,降低系统的可靠性。除采用硬件滤波外,通常还进行软件滤波处理,以去除干扰信号,大幅度降低误判率。
3.2 超声波传感器扇形扫描探测
超声波传感器存在的问题:
- 无法精确描述障碍物的位置。超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。

- 超声波测距指向性不足。超声波测距系统选用的传感器波 束角越大,被测物体的具体方位就越不确定,测距的指向性也就越差。只能测得被测物体与传感器之间一的距离, 无法确定产生该距离物体的确切方向及物体数量。
- 由于超声波传感器的指向性和探测范围成反比,如果要求系统能够更精确地测得障碍物的位置,就要使用数量较多的小波束传感器密集阵列。该方法成本较高、 影响美观,造成干扰,影响探测的可靠性。
- 目前无人车选用3~4个探测范围较大的大波束角超声波传感器阵列探测。该方法只能够探知障碍物的存在,却无法明确障碍物的具体方位,存在一定盲区。

目前自动驾驶汽车使用超声波传感器扇形扫描探测方法,如图所示。使用步距角为7.2°的步进电机驱动波束角为5°的超声波传感器。在每一轮扫描中,电机步进20步,扫描车辆正前方及左右共144°范围。从起始位置开始,超声波传感器会在21个不同的角度上测距。
步进电机每步进一个角度超声波传感器在当前的角度上测得一个距离信号,结合当前扫描角度,就会得到一个较为精确的,包含距离、方向两方面内容的位置信息,依据这些信息,就能够较为精确地判断障碍物的具体方位,得知相对准确的车辆周围的环境信息。
3.3 超声波雷达的技术参数
- 测量距离
超声波雷达的测量距离取决于其使用的波长和频率:波长越长,频率越小,测量距离越大。测量汽车前后障碍物的短距超声波雷达测量距离一般为0.15-2.50m安装在汽车侧面、用于测量侧方障碍物距离的长距超声波雷达测量距离一般为0.30-5.0m。 - 测量精度
测量精度是指传感器测量值与真实值的偏差。超声波雷达测量精度主要受被测物体体积、表面形状、表面材料等影响。被测物体体积过小、表面形状凹凸不平、物体材料吸收声波等都会降低超声传感器测量精度。测量精度越高,感知信息越可靠。 - 探测角度
由于超声波雷达发射出去的超声波具有一定的指向性,波束的截面类似椭圆形,因此探的时有取:角价为平两和m作步工作频率直接影响超声波的扩散和吸收损失、障碍物反射损失、背景噪声,并直接决定传感器的尺寸。一般选择40kHz左右,这样传感器方向性尖锐,且避开了噪声,提高了信噪比。虽然传播损失相目对低频有所增加,但不会给发射和接收带来困难。 - 工作温度
由于超声波雷达应的应用场景要求温度很高,有的应用场景要求温度很低,因此超声波雷达必颈满足工作温度的要求。
3.4 超声波雷达在自动驾驶中的应用
智能网联汽车上常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,也就是用于探测汽车前后障碍物的传感器,测量距离般为0.15~2.5m,称为驻车辅
助传感器(UPA);第二种是安装在汽车侧面的,用于测量停车位长度的超声波雷达,测量距离般为0.30~5.0m,称为泊车辅助传感器(APA)。
3.4.1 自动泊车
自动泊车( Auto Parking Asist,APA)是最常见的泊车辅助系统。泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
3.4.2 远程遥控泊车
远程遥控泊车辅助( Remote Parking Asis,RPA)系统是在APA自动泊车技术的基础之上发展而来的,车载传感器的配置方案与APA类似。它解决了停车后难以打开自车车门的尴尬场景,比如在两边都停了车的车位,或在比较狭窄的停车房。常见于特斯拉、宝马7系、奥迪A8等高端车型中。
3.4.3 自学习泊车
自学习泊车能够学习驾驶员的泊入和泊出操作,并在以后自主完成这个过程。自学习泊车辅助系统的核心技术是即时定位与地图构建( SLAM)。
驾驶员在准备停车前,可以在库位不远处,开启“路线学习”功能,随后慢慢将汽车泊入固定车位,系统就会自学习该段行驶和泊车路线泊在路线一且学习成功,汽车便可达到“过目不忘”。完成路线的学习后,在录制时的相同起点下车,用手机蓝牙连接汽车,启动自学习泊车辅助系统,汽车就能够模仿先前录制的泊车路线,完成自动泊车。
驾驶员除了让汽车学习泊入车库的过程外,还能够学习汽车泊出,并行驶到办公楼的过程。
3.4.4 自动代客泊车
自动代客泊车( Automated-Valet-Parking,AVP)是为了解决日常工作、生活中停车难的痛点,其主要的应用地点通常是办公楼或者大型商场的地上或地下停车场。
AVP除了要实现泊入车库的功能外,还需要解决从驾驶员下车点低速(小于20kmh)行驶至库位旁的问题。为了能尽可能地安全行驶到库位旁,必须提升汽车远距离感知的能力,前视摄像头成为最优的传感器方案。
除超声波雷达和视觉传感器外,实现自动代客泊车AVP还需要引入停车场的高精度地图,再配合SLAM或视觉匹配定位的方法,才能够让汽车知道它现在在哪?应该去哪里寻找停车位。除自行寻找停车位外,具备AVP功能的汽车还用以配合智能作场更好地完成自动代客泊车的功能。
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。本系列文章主要参考了清华大学、北京理工大学、哈尔滨工业大学、深蓝学院、百度Apollo等相关课程。