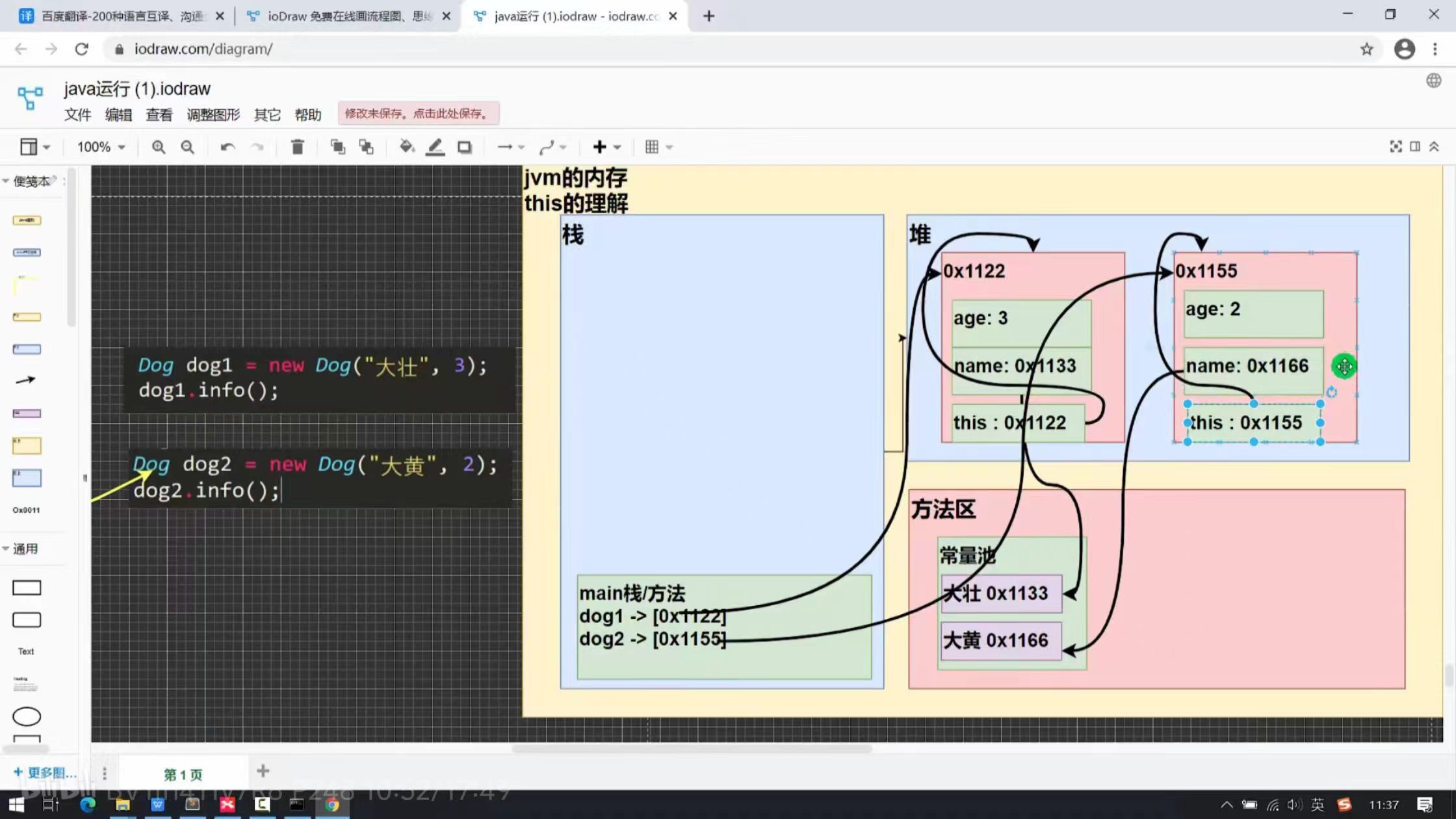
下图所示,关节2为无动力旋转关节,关节4为无动力移动关节,关节5为旋转关节,差速轮可绕轮中心点4自由旋转,差速轮带动2和4关节运动。设计差速轮和机械臂解算方法,使其相互配合到达接收口,瞄准目标位置。

解算过程:先当成机械臂进行求解,然后再求解差速轮轨迹。
效果:
两轮差速拖动机械臂瞄准目标
下图所示,关节2为无动力旋转关节,关节4为无动力移动关节,关节5为旋转关节,差速轮可绕轮中心点4自由旋转,差速轮带动2和4关节运动。设计差速轮和机械臂解算方法,使其相互配合到达接收口,瞄准目标位置。
解算过程:先当成机械臂进行求解,然后再求解差速轮轨迹。
效果:
两轮差速拖动机械臂瞄准目标
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1941333.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!