一、本文介绍
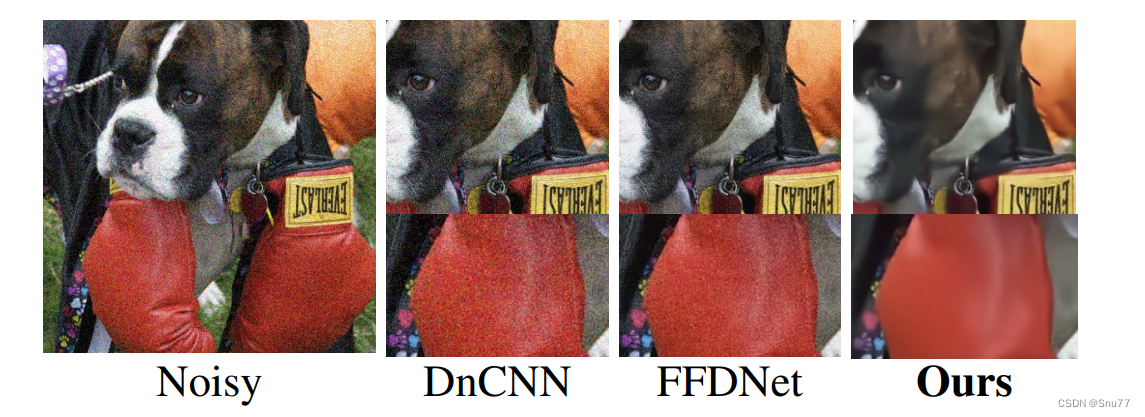
本文给大家带来的改进机制是单阶段盲真实图像去噪网络RIDNet,RIDNet(Real Image Denoising with Feature Attention)是一个用于真实图像去噪的卷积神经网络(CNN),旨在解决现有去噪方法在处理真实噪声图像时性能受限的问题。通过单阶段结构和特征注意机制,RIDNet在多种数据集上展示了其优越性,下面的图片为其效果图片包括和其它图像图像网络的对比图。
欢迎大家订阅我的专栏一起学习YOLO!
专栏回顾:YOLOv10改进系列专栏——本专栏持续复习各种顶会内容——科研必备
目录
一、本文介绍
二、RIDNet 网络的原理和机制
三、核心代码
四、手把手教你添加RIDNet
4.1 修改一
4.2 修改二
4.3 修改三
4.4 修改四
五、RIDNet 的yaml文件和运行记录
5.1 RIDNet 的yaml文件
5.2 训练代码
5.3 RIDNet 的训练过程截图
五、本文总结
二、RIDNet 网络的原理和机制
官方论文地址: 官方论文地址点击此处即可跳转
官方代码地址: 官方代码地址点击此处即可跳转
RIDNet(Real Image Denoising with Feature Attention)是一个用于真实图像去噪的卷积神经网络(CNN),旨在解决现有去噪方法在处理真实噪声图像时性能受限的问题。通过单阶段结构和特征注意机制,RIDNet在多种数据集上展示了其优越性。
网络架构
RIDNet由三个主要模块组成:
1. 特征提取模块(Feature Extraction Module):
该模块包含一个卷积层,旨在从输入的噪声图像中提取初始特征。
2. 特征学习模块(Feature Learning Module):
- 核心部分是增强注意模块(Enhanced Attention Module,EAM),使用残差在残差结构(Residual on Residual)和特征注意机制来增强特征学习能力。
- EAM包括两个主要部分:
- 特征提取子模块:通过两个膨胀卷积层和一个合并卷积层提取和学习特征。
- 特征注意子模块:使用全局平均池化和自门控机制生成特征注意力,调整每个通道的特征权重,以突出重要特征。
3. 重建模块(Reconstruction Module):
包含一个卷积层,将学习到的特征重建为去噪后的图像。
3. 特征注意机制
特征注意机制通过以下步骤实现:
1. 全局平均池化(Global Average Pooling):
将特征图从 `h × w × c` 缩小到 `1 × 1 × c`,捕捉全局上下文信息。
2. 自门控机制(Self-Gating Mechanism):
使用两个卷积层和Sigmoid激活函数调整特征图的权重。
第一个卷积层减少通道数,第二个卷积层恢复原始通道数,最终生成特征注意力。
3. 特征调整(Feature Rescaling):
通过特征注意力调整每个通道的特征权重,增强重要特征。
跳跃连接
RIDNet使用了多种跳跃连接,以确保信息的高效流动和梯度的稳定传递:
1. 长跳跃连接(Long Skip Connection,LSC):
连接输入和EAM模块的输出,增强信息流动。
2. 短跳跃连接(Short Skip Connection,SSC):
连接EAM内部的不同层,确保特征图的有效传递。
3.局部连接(Local Connection,LC)**:
在EAM内部实现局部特征学习。
结论:RIDNet在多个合成和真实噪声数据集上进行了广泛的实验,展示了其在定量指标(如PSNR)和视觉质量上的优越性。与现有最先进的算法相比,RIDNet在处理合成噪声和真实噪声图像时均表现出色。RIDNet通过引入特征注意机制和残差在残差结构,实现了对真实图像去噪的有效处理。其单阶段结构、跳跃连接和特征注意机制确保了高效的特征学习和信息传递,使其在多个数据集上均取得了优异的性能。
三、核心代码
这个代码基础版本原先有1000+GFLOPs,我将其Block层数优化了一些,并将通道数减少了一部分将参数量降低到了20+。
import math
import torch
import torch.nn as nn
import torch.nn.functional as F
def default_conv(in_channels, out_channels, kernel_size, bias=True):
return nn.Conv2d(
in_channels, out_channels, kernel_size,
padding=(kernel_size//2), bias=bias)
class MeanShift(nn.Conv2d):
def __init__(self, rgb_range, rgb_mean, rgb_std, sign=-1):
super(MeanShift, self).__init__(3, 3, kernel_size=1)
std = torch.Tensor(rgb_std)
self.weight.data = torch.eye(3).view(3, 3, 1, 1)
self.weight.data.div_(std.view(3, 1, 1, 1))
self.bias.data = sign * rgb_range * torch.Tensor(rgb_mean)
self.bias.data.div_(std)
self.requires_grad = False
def init_weights(modules):
pass
class Merge_Run(nn.Module):
def __init__(self,
in_channels, out_channels,
ksize=3, stride=1, pad=1, dilation=1):
super(Merge_Run, self).__init__()
self.body1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, pad),
nn.ReLU(inplace=True)
)
self.body2 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, 2, 2),
nn.ReLU(inplace=True)
)
self.body3 = nn.Sequential(
nn.Conv2d(in_channels * 2, out_channels, ksize, stride, pad),
nn.ReLU(inplace=True)
)
init_weights(self.modules)
def forward(self, x):
out1 = self.body1(x)
out2 = self.body2(x)
c = torch.cat([out1, out2], dim=1)
c_out = self.body3(c)
out = c_out + x
return out
class Merge_Run_dual(nn.Module):
def __init__(self,
in_channels, out_channels,
ksize=3, stride=1, pad=1, dilation=1):
super(Merge_Run_dual, self).__init__()
self.body1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, pad),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels, out_channels, ksize, stride, 2, 2),
nn.ReLU(inplace=True)
)
self.body2 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, 3, 3),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels, out_channels, ksize, stride, 4, 4),
nn.ReLU(inplace=True)
)
self.body3 = nn.Sequential(
nn.Conv2d(in_channels * 2, out_channels, ksize, stride, pad),
nn.ReLU(inplace=True)
)
init_weights(self.modules)
def forward(self, x):
out1 = self.body1(x)
out2 = self.body2(x)
c = torch.cat([out1, out2], dim=1)
c_out = self.body3(c)
out = c_out + x
return out
class BasicBlock(nn.Module):
def __init__(self,
in_channels, out_channels,
ksize=3, stride=1, pad=1):
super(BasicBlock, self).__init__()
self.body = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, pad),
nn.ReLU(inplace=True)
)
init_weights(self.modules)
def forward(self, x):
out = self.body(x)
return out
class BasicBlockSig(nn.Module):
def __init__(self,
in_channels, out_channels,
ksize=3, stride=1, pad=1):
super(BasicBlockSig, self).__init__()
self.body = nn.Sequential(
nn.Conv2d(in_channels, out_channels, ksize, stride, pad),
nn.Sigmoid()
)
init_weights(self.modules)
def forward(self, x):
out = self.body(x)
return out
class ResidualBlock(nn.Module):
def __init__(self,
in_channels, out_channels):
super(ResidualBlock, self).__init__()
self.body = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, 1, 1),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, 3, 1, 1),
)
init_weights(self.modules)
def forward(self, x):
out = self.body(x)
out = F.relu(out + x)
return out
class EResidualBlock(nn.Module):
def __init__(self,
in_channels, out_channels,
group=1):
super(EResidualBlock, self).__init__()
self.body = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, 1, 1, groups=group),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, 3, 1, 1, groups=group),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, 1, 1, 0),
)
init_weights(self.modules)
def forward(self, x):
out = self.body(x)
out = F.relu(out + x)
return out
class CALayer(nn.Module):
def __init__(self, channel, reduction=16):
super(CALayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.c1 = BasicBlock(channel, channel // reduction, 1, 1, 0)
self.c2 = BasicBlockSig(channel // reduction, channel, 1, 1, 0)
def forward(self, x):
y = self.avg_pool(x)
y1 = self.c1(y)
y2 = self.c2(y1)
return x * y2
class Block(nn.Module):
def __init__(self, in_channels, out_channels, group=1):
super(Block, self).__init__()
self.r1 = Merge_Run_dual(in_channels, out_channels)
self.r2 = ResidualBlock(in_channels, out_channels)
self.r3 = EResidualBlock(in_channels, out_channels)
# self.g = ops.BasicBlock(in_channels, out_channels, 1, 1, 0)
self.ca = CALayer(in_channels)
def forward(self, x):
r1 = self.r1(x)
r2 = self.r2(r1)
r3 = self.r3(r2)
# g = self.g(r3)
out = self.ca(r3)
return out
class RIDNET(nn.Module):
def __init__(self, args):
super(RIDNET, self).__init__()
n_feats = 16
kernel_size = 3
rgb_range = 255
mean = (0.4488, 0.4371, 0.4040)
std = (1.0, 1.0, 1.0)
self.sub_mean = MeanShift(rgb_range, mean, std)
self.add_mean = MeanShift(rgb_range, mean, std, 1)
self.head = BasicBlock(3, n_feats, kernel_size, 1, 1)
self.b1 = Block(n_feats, n_feats)
self.b2 = Block(n_feats, n_feats)
self.b3 = Block(n_feats, n_feats)
self.b4 = Block(n_feats, n_feats)
self.tail = nn.Conv2d(n_feats, 3, kernel_size, 1, 1, 1)
def forward(self, x):
s = self.sub_mean(x)
h = self.head(s)
# b1 = self.b1(h)
# b2 = self.b2(b1)
# b3 = self.b3(b2)
b_out = self.b4(h)
res = self.tail(b_out)
out = self.add_mean(res)
f_out = out + x
return f_out
if __name__ == "__main__":
# Generating Sample image
image_size = (1, 3, 640, 640)
image = torch.rand(*image_size)
# Model
model = RIDNET(3)
out = model(image)
print(out.size())四、手把手教你添加RIDNet
4.1 修改一
第一还是建立文件,我们找到如下ultralytics/nn文件夹下建立一个目录名字呢就是'Addmodules'文件夹(用群内的文件的话已经有了无需新建)!然后在其内部建立一个新的py文件将核心代码复制粘贴进去即可。
4.2 修改二
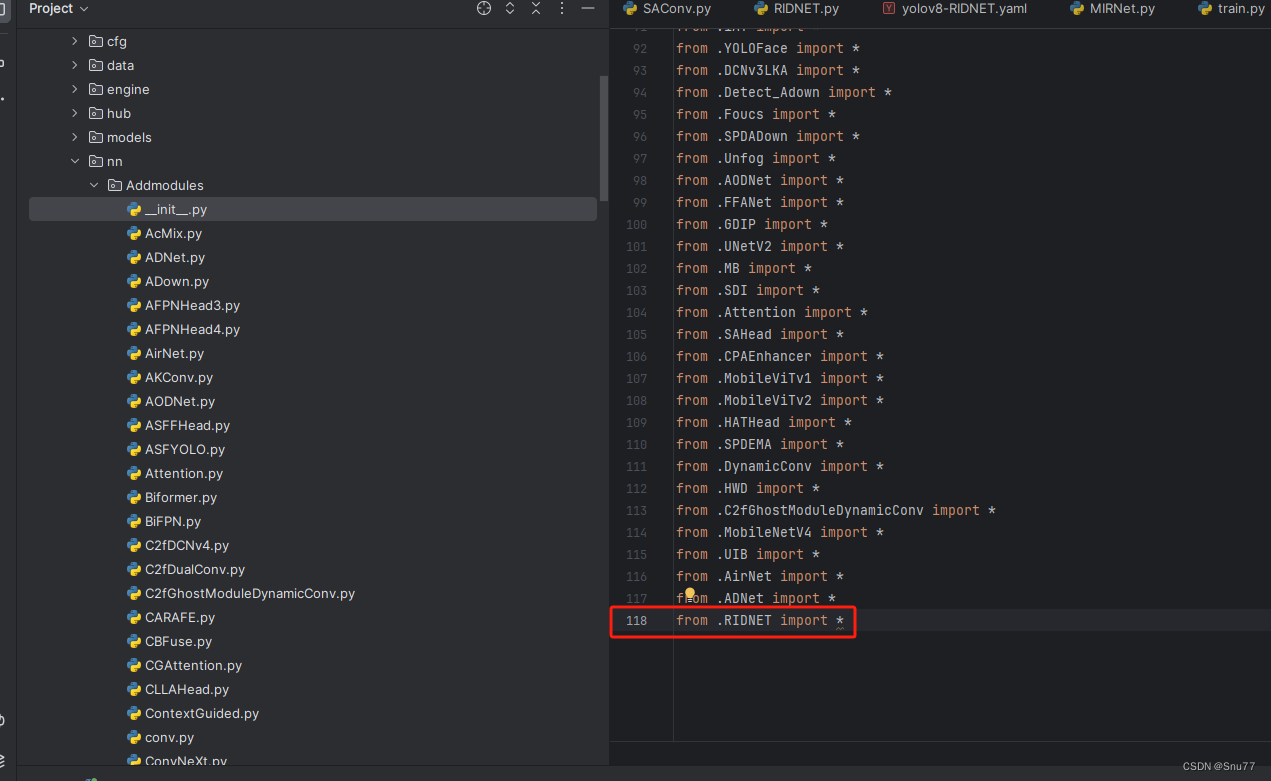
第二步我们在该目录下创建一个新的py文件名字为'__init__.py'(用群内的文件的话已经有了无需新建),然后在其内部导入我们的检测头如下图所示。
4.3 修改三
第三步我门中到如下文件'ultralytics/nn/tasks.py'进行导入和注册我们的模块(用群内的文件的话已经有了无需重新导入直接开始第四步即可)!
从今天开始以后的教程就都统一成这个样子了,因为我默认大家用了我群内的文件来进行修改!!
4.4 修改四
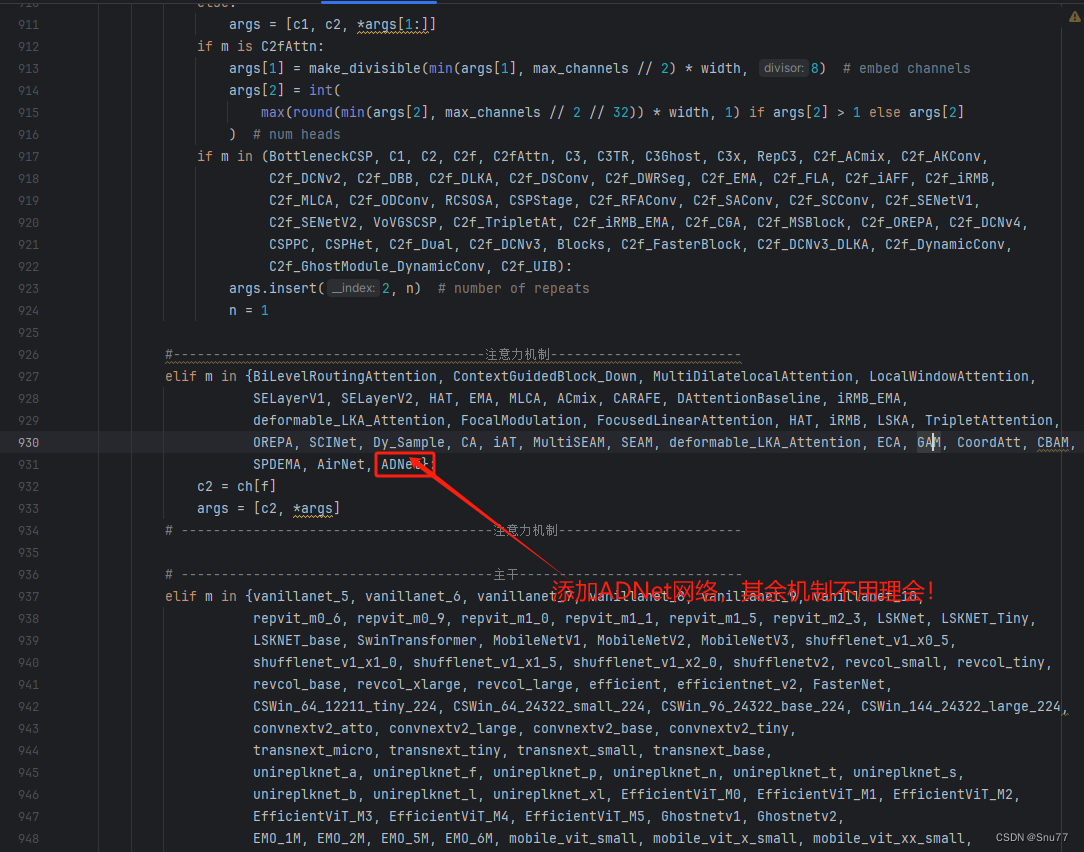
按照我的添加在parse_model里添加即可。
到此就修改完成了,大家可以复制下面的yaml文件运行。
五、RIDNet 的yaml文件和运行记录
5.1 RIDNet 的yaml文件
此版本训练信息:YOLOv10n-RIDNet summary: 541 layers, 2811717 parameters, 2811701 gradients, 28.2 GFLOPs
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv10 object detection model. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov10n.yaml' will call yolov10.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, RIDNET, []] # 0-P1/2
- [-1, 1, Conv, [64, 3, 2]] # 1-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 2-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 4-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, SCDown, [512, 3, 2]] # 6-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, SCDown, [1024, 3, 2]] # 8-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 10
- [-1, 1, PSA, [1024]] # 11
# YOLOv10.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 7], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 14
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 5], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 17 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 14], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 20 (P4/16-medium)
- [-1, 1, SCDown, [512, 3, 2]]
- [[-1, 11], 1, Concat, [1]] # cat head P5
- [-1, 3, C2fCIB, [1024, True, True]] # 23 (P5/32-large)
- [[17, 20, 23], 1, v10Detect, [nc]] # Detect(P3, P4, P5)
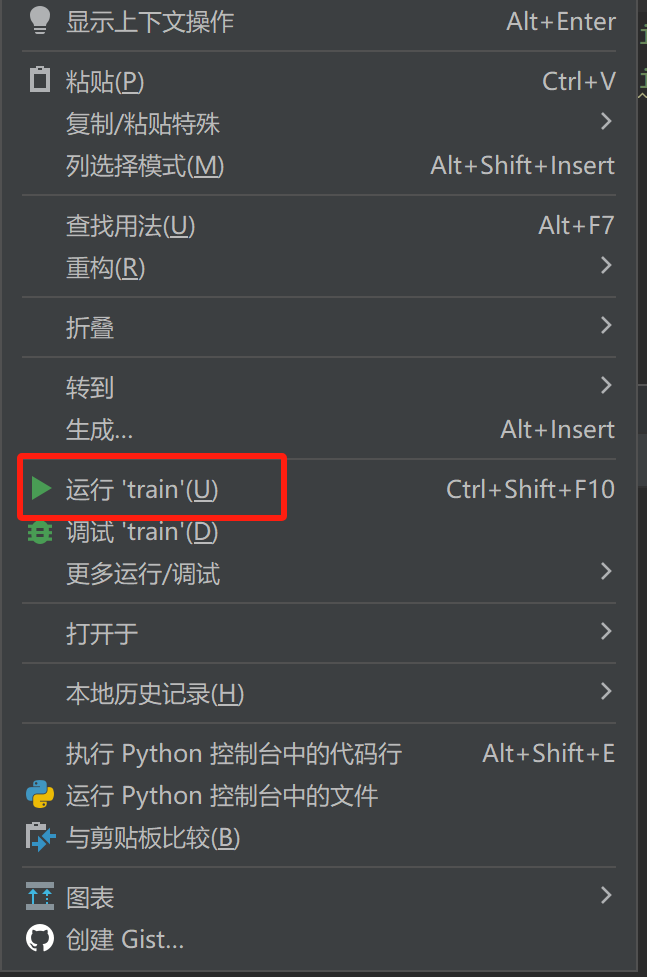
5.2 训练代码
大家可以创建一个py文件将我给的代码复制粘贴进去,配置好自己的文件路径即可运行。
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('ultralytics/cfg/models/v8/yolov8-C2f-FasterBlock.yaml')
# model.load('yolov8n.pt') # loading pretrain weights
model.train(data=r'替换数据集yaml文件地址',
# 如果大家任务是其它的'ultralytics/cfg/default.yaml'找到这里修改task可以改成detect, segment, classify, pose
cache=False,
imgsz=640,
epochs=150,
single_cls=False, # 是否是单类别检测
batch=4,
close_mosaic=10,
workers=0,
device='0',
optimizer='SGD', # using SGD
# resume='', # 如过想续训就设置last.pt的地址
amp=False, # 如果出现训练损失为Nan可以关闭amp
project='runs/train',
name='exp',
)5.3 RIDNet 的训练过程截图

五、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv10改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏回顾:YOLOv10改进系列专栏——本专栏持续复习各种顶会内容——科研必备