文章目录
- 如何更改docker默认存储路径?
- 版本1(没测试)
- 版本2(可行)
- 1. 停止 Docker 服务:
- 2. 创建新的存储目录:
- 3. 修改 Docker 配置文件:
- 4. 移动现有的 Docker 数据:
- 5. 重新启动 Docker 服务:
- 6. 验证修改
- 7. 真实验证(记录各时间点和存储占用)
- Thu 11 Jul 2024 01:33:57 PM CST
- Thu 11 Jul 2024 04:04:38 PM CST
- 为什么存在以上两种修改方法,有何异同?(修改`etc/systemd/system/docker.service.d/override.conf`和修改`etc/docker/daemon.json` )
如何更改docker默认存储路径?
版本1(没测试)
默认情况下,Docker 在 Linux 上安装时会将其数据(如镜像和容器)存储在 /var/lib/docker 目录下,这个目录通常位于根分区 /。如果你的根分区 / 的空间不足,你可以考虑将 Docker 的数据目录移动到其他分区,或者在安装 Docker 时直接配置它使用其他分区。
要更改 Docker 的默认存储位置,你可以通过修改 Docker 的配置文件或在启动 Docker 服务时设置环境变量来指定新的数据目录。下面是一些步骤说明如何进行配置:
-
停止 Docker 服务:
sudo systemctl stop docker
-
修改 Docker 配置文件(如果你使用的是 systemd):
- 打开或创建 Docker 的 systemd 配置文件(一开始没有这个文件是正常的):
sudo vi /etc/systemd/system/docker.service.d/override.conf - 添加以下内容来指定新的数据目录,假设你想将数据存储在
/mnt/docker/:[Service] ExecStart= ExecStart=/usr/bin/dockerd --data-root /mnt/docker -H fd:// --containerd=/run/containerd/containerd.sock - 保存并关闭文件。
- 打开或创建 Docker 的 systemd 配置文件(一开始没有这个文件是正常的):
-
重新加载 systemd 配置并重新启动 Docker 服务:
sudo systemctl daemon-reload sudo systemctl start docker -
检查 Docker 是否使用新的数据目录:
docker info | grep "Docker Root Dir"
确保新的数据目录所在的分区有足够的空间,以避免在使用 Docker 时遇到空间不足的问题。
版本2(可行)
要修改 Docker 的存储路径至 /data/docker,您可以按照以下步骤操作:
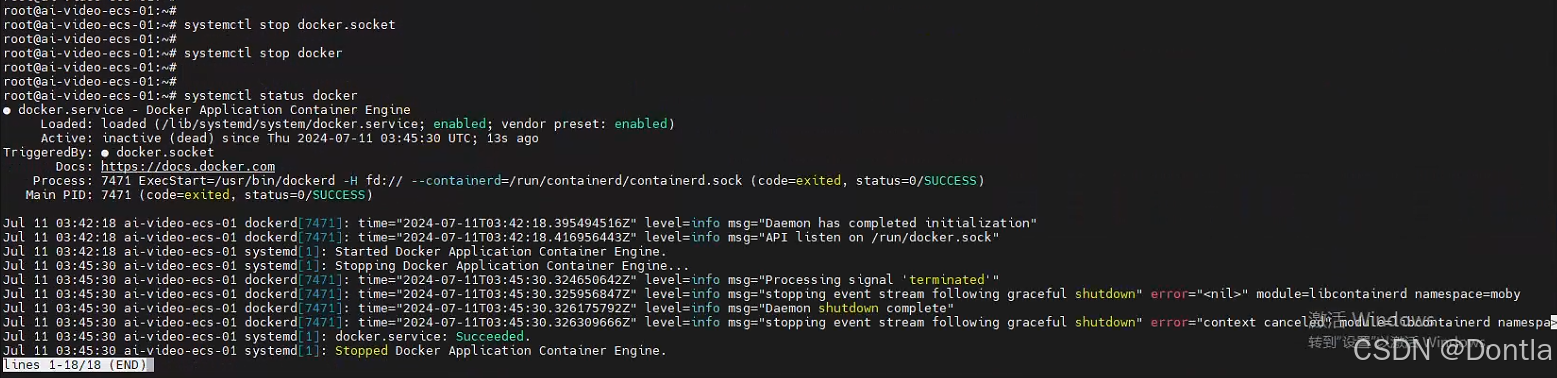
1. 停止 Docker 服务:
打开终端,使用以下命令停止 Docker 服务:
sudo systemctl stop docker.socket
sudo systemctl stop docker
一开始只执行一条停不了:


后面两条执行就能停了:
2. 创建新的存储目录:
如果 /data/docker 目录还不存在,使用以下命令创建它:
sudo mkdir -p /data/docker
3. 修改 Docker 配置文件:
编辑 Docker 的 daemon 配置文件 /etc/docker/daemon.json。如果该文件不存在,您需要创建它。
sudo vi /etc/docker/daemon.json
在文件中添加或修改以下内容:
{
"data-root": "/data/docker"
}
保存并关闭文件。
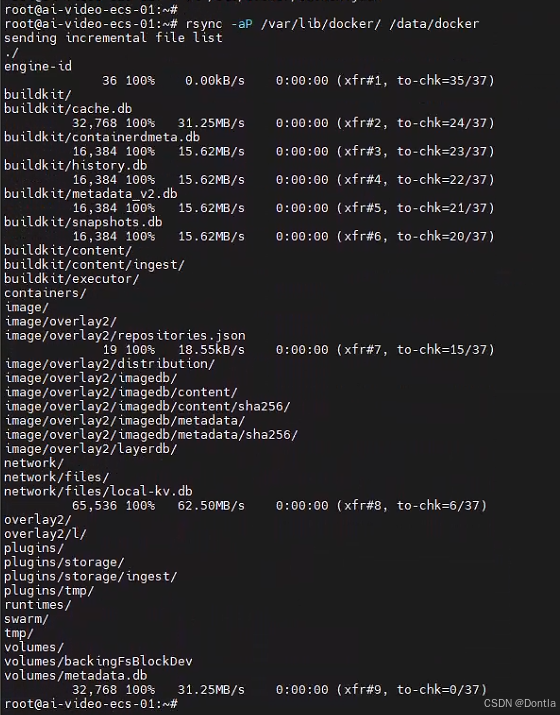
4. 移动现有的 Docker 数据:
如果您的 Docker 安装中已经有数据,并且您希望保留这些数据,可以将现有的数据移动到新的目录:
sudo rsync -aP /var/lib/docker/ /data/docker
5. 重新启动 Docker 服务:
使用以下命令重新启动 Docker 服务:
sudo systemctl start docker.socket
sudo systemctl start docker
6. 验证修改
检查 Docker 是否正确使用新的存储路径,可以查看 Docker 信息:
docker info | grep 'Docker Root Dir'

现在 Docker 已经成功地使用 /data/docker 作为其根目录了。至于您看到的警告信息 “WARNING: No swap limit support”,这是一个常见的信息,指的是您的 Linux 系统上没有启用内存交换限制的支持。
在 Docker 中,这种警告通常不会影响 Docker 容器的正常运行,它只意味着 Docker 无法强制限制容器的交换内存使用量。这通常与 Linux 内核的某些配置有关,特别是 cgroup 的配置。
注意:如果不放心,可以执行mv /var/lib/docker /var/lib/docker_old备份检测下
7. 真实验证(记录各时间点和存储占用)
通过使用一下两条命令:
date
df -BM
Thu 11 Jul 2024 01:33:57 PM CST
root@ai-video-ecs-01:/userdata/tmp# date
Thu 11 Jul 2024 01:33:57 PM CST
root@ai-video-ecs-01:/userdata/tmp#
root@ai-video-ecs-01:/userdata/tmp#
root@ai-video-ecs-01:/userdata/tmp# df -BM
Filesystem 1M-blocks Used Available Use% Mounted on
udev 32078M 0M 32078M 0% /dev
tmpfs 6425M 4M 6422M 1% /run
/dev/mapper/ubuntu--vg-ubuntu--lv 38122M 8911M 27445M 25% /
tmpfs 32124M 0M 32124M 0% /dev/shm
tmpfs 5M 0M 5M 0% /run/lock
tmpfs 32124M 0M 32124M 0% /sys/fs/cgroup
/dev/loop1 64M 64M 0M 100% /snap/core20/2318
/dev/loop0 64M 64M 0M 100% /snap/core20/1828
/dev/loop2 50M 50M 0M 100% /snap/snapd/18357
/dev/loop3 39M 39M 0M 100% /snap/snapd/21759
/dev/vda2 1946M 109M 1719M 6% /boot
/dev/loop4 92M 92M 0M 100% /snap/lxd/24061
/dev/sda1 749867M 4140M 707565M 1% /ky
/dev/sda2 9401234M 2884M 8924482M 1% /data
tmpfs 6425M 0M 6425M 0% /run/user/1000
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/c385332babdae4ee85601ffa1dd1ebe6c36fc1f618389ace09b2051731d5fa8c/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/31a24b6f39c2ea25d700754b5c9ea78574e772589690437fd60e4b60fac15c0c/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/88149e56439d9bad5b2b785f12ff77b6052c5ba369f53f9e12a38698c34615ce/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/b2171ae8eaa2b4b6bf61de50165b2e885f6e2d4373d02fd1e492cc1d2158bd9b/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/3e9af67e01934706a6712e2a6601292b105c26d5fecf82218f8d7ef65ca30b3d/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/341e8bc8f48a17d24ee4005c45cda9e121bececd2b0fea5463b337acbce64f04/merged
overlay 9401234M 2884M 8924482M 1% /data/docker/overlay2/6ee97fa0e1597535d0d70be41d5a3220c6f58ff033dba5388a53034afbeb8f5f/merged
root@ai-video-ecs-01:/userdata/tmp#
Thu 11 Jul 2024 04:04:38 PM CST
hw@ai-video-ecs-01:~$ date
Thu 11 Jul 2024 04:04:38 PM CST
hw@ai-video-ecs-01:~$
hw@ai-video-ecs-01:~$ df -BM
Filesystem 1M-blocks Used Available Use% Mounted on
udev 32078M 0M 32078M 0% /dev
tmpfs 6425M 4M 6422M 1% /run
/dev/mapper/ubuntu--vg-ubuntu--lv 38122M 8911M 27444M 25% /
tmpfs 32124M 0M 32124M 0% /dev/shm
tmpfs 5M 0M 5M 0% /run/lock
tmpfs 32124M 0M 32124M 0% /sys/fs/cgroup
/dev/loop1 64M 64M 0M 100% /snap/core20/2318
/dev/loop0 64M 64M 0M 100% /snap/core20/1828
/dev/loop2 50M 50M 0M 100% /snap/snapd/18357
/dev/loop3 39M 39M 0M 100% /snap/snapd/21759
/dev/vda2 1946M 109M 1719M 6% /boot
/dev/loop4 92M 92M 0M 100% /snap/lxd/24061
/dev/sda1 749867M 4141M 707564M 1% /ky
/dev/sda2 9401234M 2886M 8924479M 1% /data
tmpfs 6425M 0M 6425M 0% /run/user/1000
为什么存在以上两种修改方法,有何异同?(修改etc/systemd/system/docker.service.d/override.conf和修改etc/docker/daemon.json )
在修改 Docker 的存储位置时,可以通过修改 etc/docker/daemon.json 或 etc/systemd/system/docker.service.d/override.conf 来实现,两种方式都是正确的,但它们有不同的用途和适用情况:
-
修改
/etc/docker/daemon.json:- 这种方法通过 Docker 的配置文件来设置 Docker 的默认行为,包括存储位置、日志级别、网络配置等。
- 要修改存储位置,你可以在
daemon.json文件中设置data-root属性,指向新的存储路径。例如:{ "data-root": "/new/path/to/docker-data" } - 这种方法的优点是配置简单,且直接通过 Docker 自己的配置文件进行管理,易于理解和维护。
-
修改
/etc/systemd/system/docker.service.d/override.conf:- 这种方法适用于在使用 systemd 管理 Docker 服务的系统上。通过 systemd 的配置覆盖文件来修改 Docker 服务的启动参数。
- 你可以通过创建或修改
override.conf文件,添加一个新的ExecStart行,指定新的存储位置。例如:[Service] ExecStart= ExecStart=/usr/bin/dockerd --data-root /new/path/to/docker-data - 注意,需要先清空原有的
ExecStart设置(ExecStart=),然后重新定义。这样可以确保使用你的自定义设置启动 Docker。 - 这种方法允许你对 Docker 的启动过程进行更细粒度的控制,但相对复杂,需要对 systemd 的配置有一定了解。
总结:选择哪种方法取决于你的具体需求和你对系统的控制级别。如果你希望通过 Docker 自身的配置来管理,使用 daemon.json 是更直接的方法。如果你需要更复杂的配置或者想要控制服务的启动参数,使用 systemd 的 override.conf 方法会更合适。