一、前言
对于一个usb摄像头,它的内核驱动源码位于/drivers/media/usb/uvc/
核心层:V4L2_dev.c文件
硬件相关层: uvc_driver.c文件
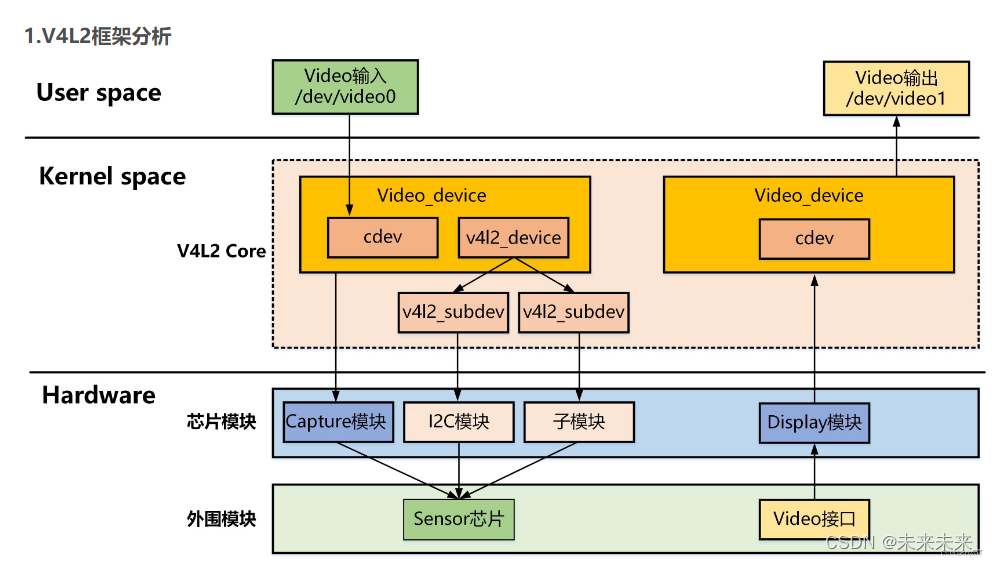
本篇记录基于对6.8.8.8内核下vivid-core.c文件(虚拟视频驱动程序)的分析,梳理Linux系统中vedio视频设备的驱动框架。
二、源码分析
1、入口函数
module_init(vivid_init);
vivid_init
//注册vivid设备和驱动
platform_device_register(&vivid_pdev);
platform_driver_register(&vivid_pdrv);


通过入口函数将平台设备和平台驱动结构体注册到内核中,关于具体的设备和驱动注册先关内容可以看Linux--平台设备、平台驱动的注册源码分析-CSDN博客这篇。
在代码中,vivid_pdrv 平台驱动没有 of_match_table 字段,因为该驱动程序不依赖设备树进行匹配和初始化。如果是真实的硬件驱动程序需要支持设备树匹配,则需要定义 of_match_table 字段,并提供一个设备树兼容字符串数组,也就是compatible属性值。
2、probe()函数
在vivid_init()里分别注册了vivid_pdev和vivid_pdrv,注册后,当他们匹配时,内核会自动则会调用该驱动程序probe()初始化该设备。在probe()里面主要进行初始化、注册等相关流程。
vivid_probe
1) vivid_create_instance /* 创建实例 */
dev = kzalloc(sizeof(*vivid_dev), GFP_KERNEL);/* 分配video_devicede */
v4l2_device_register /* 初始化v4l2_device */
2) static int vivid_create_devnodes(struct platform_device *pdev,
struct vivid_dev *dev, int inst,
unsigned int cec_tx_bus_cnt,
v4l2_std_id tvnorms_cap,
v4l2_std_id tvnorms_out,
unsigned in_type_counter[4],
unsigned out_type_counter[4])
{
/* 设置video_device */
1.vfd->fops = &vivid_fops; /*也就是在probe里的这一步实现设备操作和驱动操作的绑定*/
vfd->ioctl_ops = &vivid_ioctl_ops;
vfd->release = video_device_release_empty;
2.vfd->v4l2_dev = &dev->v4l2_dev;
3.设置"ctrl属性"(用于APP的ioctl)
v4l2_ctrl_handler_setup(&dev->ctrl_hdl_vid_cap);
v4l2_ctrl_handler_setup(&dev->ctrl_hdl_vid_out);
...
/*注册vedio_device*/ /*分配主次设备号*/
video_register_device(video_device, type:VFL_TYPE_GRABBER, nr)
__video_register_device
vdev->cdev = cdev_alloc();
vdev->cdev->ops = &v4l2_fops;
video_devices[vdev->minor] = vdev;//将video_device放入全局数组中
ret = cdev_add(vdev->cdev, MKDEV(VIDEO_MAJOR, vdev->minor), 1);
if (vdev->ctrl_handler == NULL)
vdev->ctrl_handler = vdev->v4l2_dev->ctrl_handler;
关键点:
1、分配video_device结构体内存 video_device_alloc()或kzalloc();
2、设置video_device .fops、.ioctl_ops、dev;、
也就是在probe里的这一步实现设备操作和驱动操作的绑定
3、注册video_device结构体 video_register_device();
3、操作函数(open、read、wirite等)
1、open
app: open("/dev/video0",....)
---------------------------------------------------
drv: v4l2_fops.v4l2_open
vdev = video_devdata(filp); // 根据次设备号从数组中得到video_device
ret = vdev->fops->open(filp);
vivi_ioctl_ops.open
v4l2_fh_open
当应用层发生系统调用时,会先调用到v4l2_fops中的v4l2_open,v4l2_open会找到对应设备video_device的file opr中的open,而设备中的open是在驱动注册后调用probe函数与驱动函数定义的open绑定的,这样就实现了video设备用户空间open调用驱动open的过程。
2、ioctl
app: read ....
-----------------------------------------------
drv: v4l2_fops.v4l2_read
struct video_device *vdev = video_devdata(filp);
ret = vdev->fops->read(filp, buf, sz, off);
核心层v4l2_ctrl_handler会找到video_device的fops 。过程如下(在上文中通过v4l2_ctrl_handler_setup设置了某些属性的ioctl处理函数)
__video_do_ioctl
struct video_device *vfd = video_devdata(file);
v4l2_is_known_ioctl(cmd)
info = &v4l2_ioctls[_IOC_NR(cmd)]; /* v4l2_ioctls数组存有全部IOCTL_INFO,含有 ioctl函数指针 */
ret = info->func(ops, file, fh, arg); /* 调用对应的ioctl函数 */
三、UVC(USB Video Class)
UVC全称为USB Video Class,即:USB视频类,是一种为USB视频捕获设备定义的协议标准。是Microsoft与另外几家设备厂商联合推出的为USB视频捕获设备定义的协议标准,已成为USB org标准之一。
最新的UVC版本为UVC 1.5,由USB Implementers Forum定义包括基本协议及负载格式。
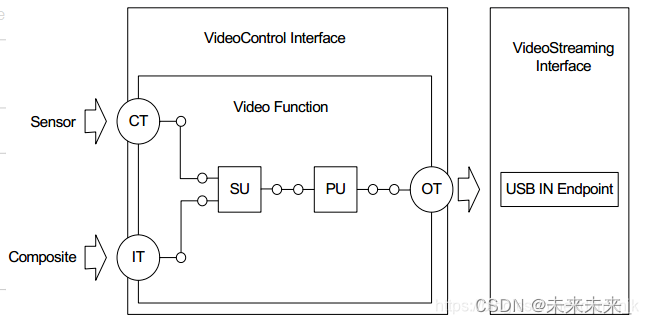
USB摄像头示例如下:
对于框架具体细节可以看这篇UVC 1.5 Class Specification 简解_uvc1.5-CSDN博客
UVC驱动的重点在于:
描述符的分析
属性的控制: 通过VideoControl Interface来设置
格式的选择:通过VideoStreaming Interface来设置
数据的获得:通过VideoStreaming Interface的URB来获得
参考文章:
【Linux驱动】Linux--虚拟摄像头vivid驱动分析(基于5.4内核)-CSDN博客
【转载】linux摄像头驱动_linux 摄像头驱动-CSDN博客


![算法:[动态规划] 斐波那契数列模型](https://i-blog.csdnimg.cn/direct/23e3628609c144098f9e354c3f791af6.png)