实验报告:智能小车系统设计与实现
一、背景介绍
本实验旨在设计并实现一个基于STC89C52单片机控制的智能小车系统。该系统通过超声波传感器进行避障,通过红外接收器实现远程控制,同时具备循迹功能。整个系统的核心是单片机,它通过对各种传感器和执行器的控制,实现智能小车的多种功能。
二、硬件介绍
- STC89C52单片机:主控芯片,负责处理所有传感器数据及控制信号。
- 红外接收器:接收遥控器的信号,实现远程控制。
- 超声波传感器:用于检测前方障碍物的距离,进行避障处理。
- 电机及驱动模块:控制小车的运动,包括前进、后退、左转、右转等。
- LCD1602显示屏:用于显示当前小车的状态信息,如距离、按键值等。
- 蜂鸣器:提供声音提示。
三、器件连接
- 红外接收器连接到单片机的P3^3引脚。
- 超声波传感器的Trig和Echo分别连接到P10和P11引脚。
- 电机驱动连接到单片机的P30、P31、P32、P36、P34、P35引脚。
- LCD1602显示屏连接到单片机的P0端口。
- 蜂鸣器连接到P2^4引脚。
四、设计原理
1. 红外接收与解码
红外接收器接收遥控器发出的信号,通过外部中断1(INT1)进行处理,记录脉冲时间并存储在IR_receive_data数组中。定时器1以256us的周期记录脉冲宽度,通过分析脉冲宽度确定接收的数据位值。解码后,将按键值存储在IR_receive_code中。
2. 超声波测距
超声波传感器通过发送Trig信号触发测距,Echo信号返回高电平时间用于计算距离。距离计算公式为:
[ \text{距离} = \frac{\text{高电平时间} \times 1.7}{100} ]
3. 电机控制
电机通过H桥电路进行驱动,控制信号分别连接到P3端口,实现前进、后退、左转、右转及停止功能。
4. LCD1602显示
LCD1602显示屏用于显示当前小车状态信息,如距离、按键值等。通过LCD1602_init初始化后,通过LCD1602_Print函数进行显示操作。
5. 蜂鸣器提示
蜂鸣器通过PWM控制发出声音提示,主要用于操作确认。
五、电路原理
电路设计包括电源模块、传感器模块、执行器模块及显示模块。每个模块与单片机连接,并通过单片机的I/O口进行数据采集与控制。
六、程序原理
程序包括初始化、主循环及各功能模块的实现。
1. 初始化
包括定时器、外部中断、LCD1602显示屏及各传感器的初始化。
void Init_Timer0() {
TMOD &= 0xf0;
TMOD |= 0x01; // 设T0为方式1
TH0 = 0;
TL0 = 0; // 定时器0初始化装载0
ET0 = 1; // 允许T0中断
EA = 1; // 开启总中断
}
void IR_receive_init() {
IR_receive_time = 0;
IR_receive_flag = 0;
IR_receive_bit = 0;
IR_receive_OK = 0;
IR_receive_end = 0;
TMOD |= 0x20; // 设置定时器1为8位自动重装计数
TH1 = 0x00;
TL1 = 0x00; // 设置定时时间为256us
ET1 = 1; // 定时器1中断打开
EA = 1; // 总中断打开
TR1 = 1; // 启动定时器1
}
2. 主循环
主循环主要负责超声波测距、红外信号处理及执行相应的控制操作。
void main(void) {
// 初始化LCD1602
LCD1602_init();
LCD1602_Print(0, 0, "KEY:");
LCD1602_Print(0, 1, "Distance:");
IR_receive_init(); // 红外解码设置程序
int1init(); // 外部中断设置
Init_Timer0();
while (1) {
delay_ms(50);
// 测量超声波距离并显示
TR0 = 0;
TH0 = 0;
TL0 = 0;
Trig = 1;
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
Trig = 0;
while (!Echo);
TR0 = 1;
while (Echo);
TR0 = 0;
distance = Conut();
// 显示距离
count = 0;
disp[count++] = distance % 1000 / 100 + '0';
disp[count++] = distance % 100 / 10 + '0';
disp[count++] = distance % 10 / 1 + '0';
disp[count++] = 'c'; disp[count++] = 'm';
disp[count++] = 0;
LCD1602_Print(9, 1, disp);
// 按键处理
if (IR_receive_OK) {
IR_receive_OK = 0;
IR_code(); // 红外数据解码
if (IR_receive_end) {
IR_receive_end = 0;
IR_check(IR_receive_code[2]); // 红外按键值处理程序
if (KEY == 1) {
AUTOMODE = !AUTOMODE; // 自动模式开关
} else if (KEY == 2) {
forward(); // 前进
} else if (KEY == 5) {
left(); // 左转
} else if (KEY == 6) {
stop(); // 停止
} else if (KEY == 7) {
right(); // 右转
} else if (KEY == 10) {
backward(); // 后退
}
beep(); // 蜂鸣器提示
IR_receive_init(); // 重新初始化红外接收
int1init();
}
}
// 自动模式下的避障与循迹
if (AUTOMODE) {
Avoid(); // 避障
tracking(); // 循迹
}
}
}
七、实验结果
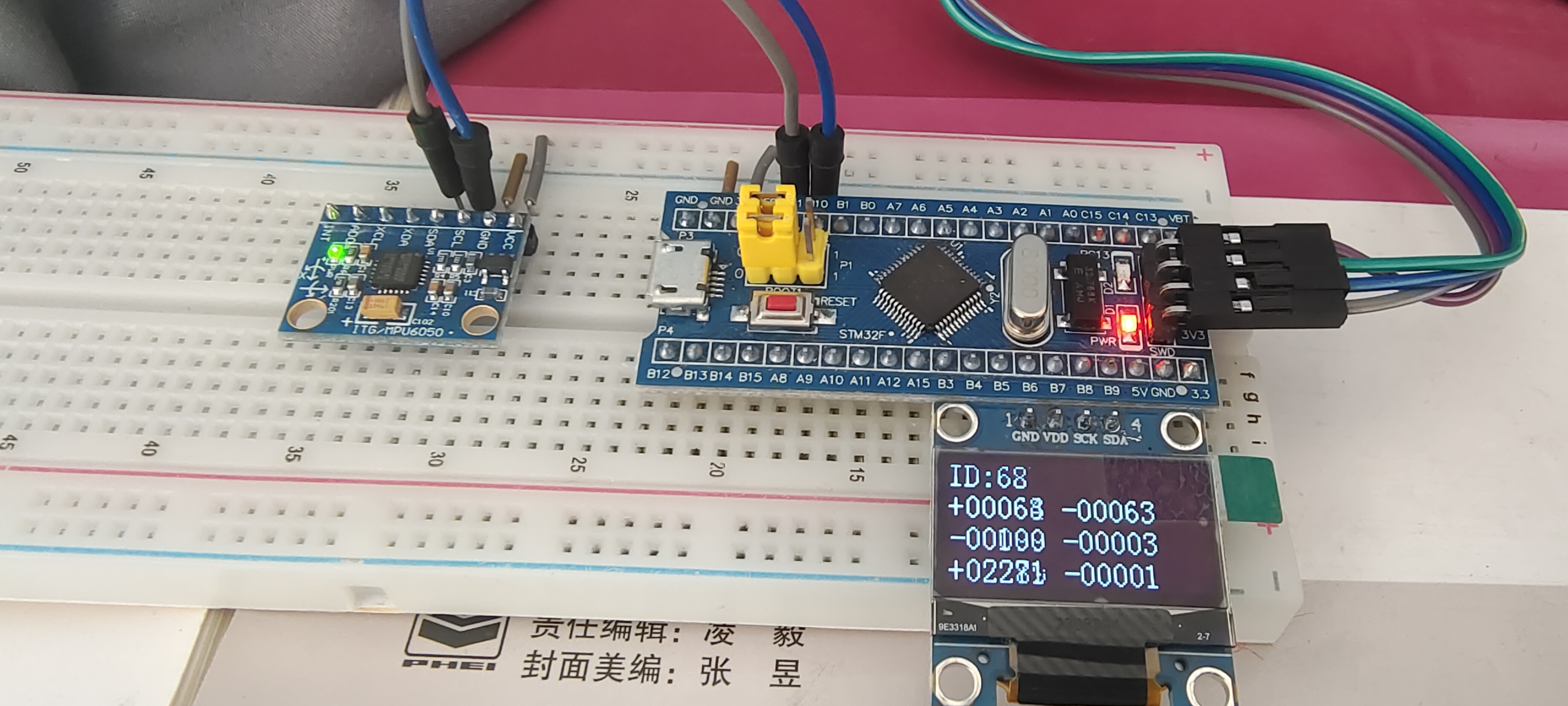
通过上述设计与实现,小车能够实现红外遥控、超声波避障及自动循迹功能。实验过程中,通过LCD1602实时显示距离及按键状态,方便调试与观察。
八、结论
本实验成功实现了基于STC89C52单片机的智能小车系统,具备红外遥控、超声波避障及自动循迹等功能。通过合理的硬件连接与程序设计,小车能够稳定运行,实现预期功能。进一步优化可以考虑提高传感器精度及增加更多智能功能。
资料
https://docs.qq.com/sheet/DUEdqZ2lmbmR6UVdU?tab=BB08J2