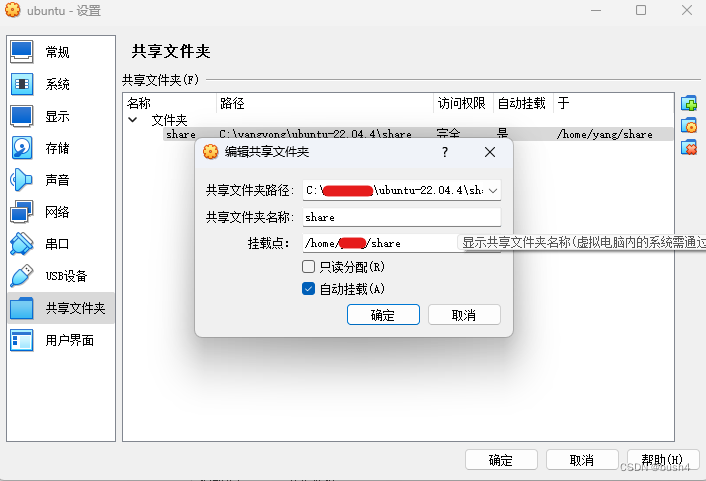
AI使用导航网格进行移动,所以,先设置导航网格边界体积
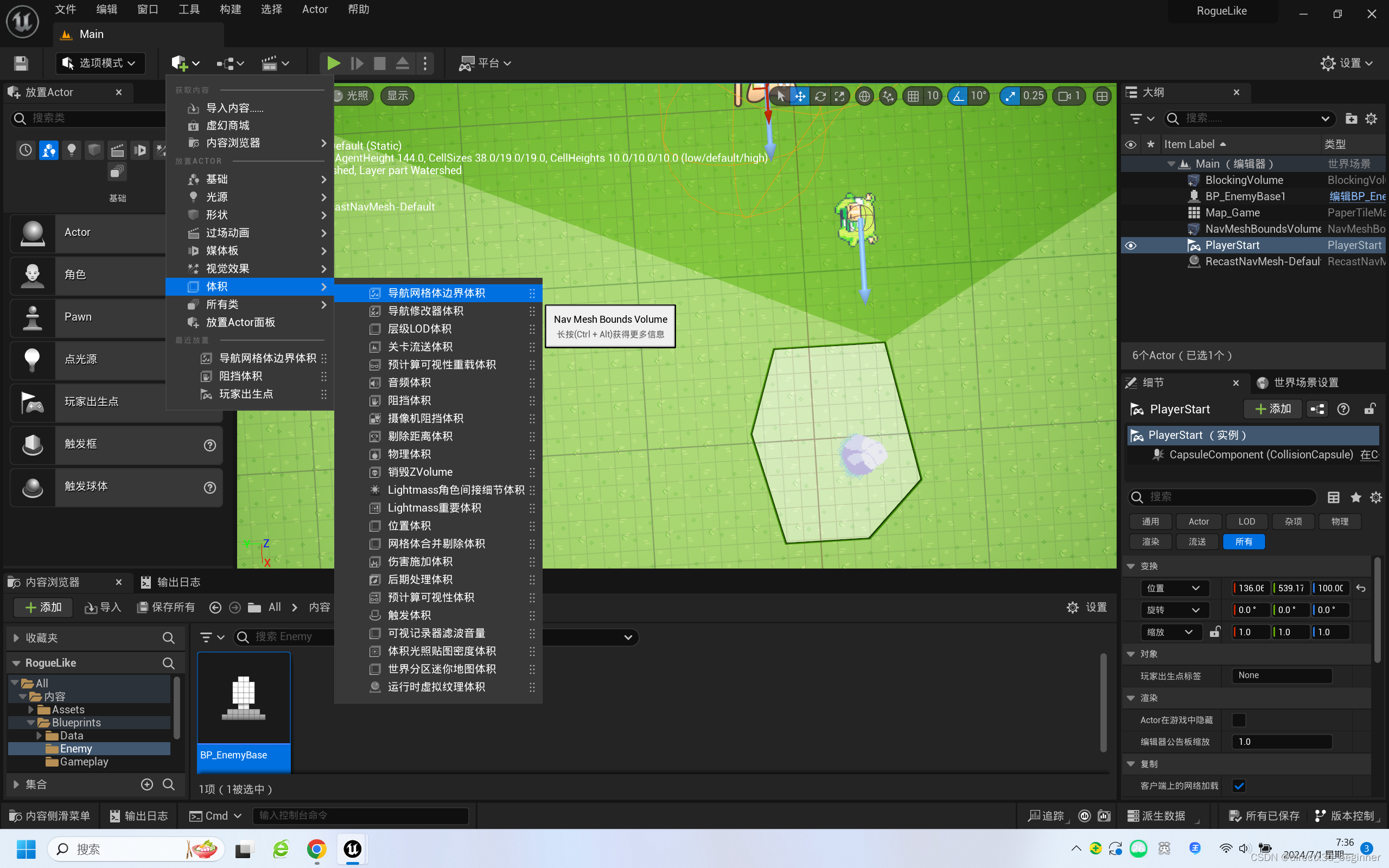
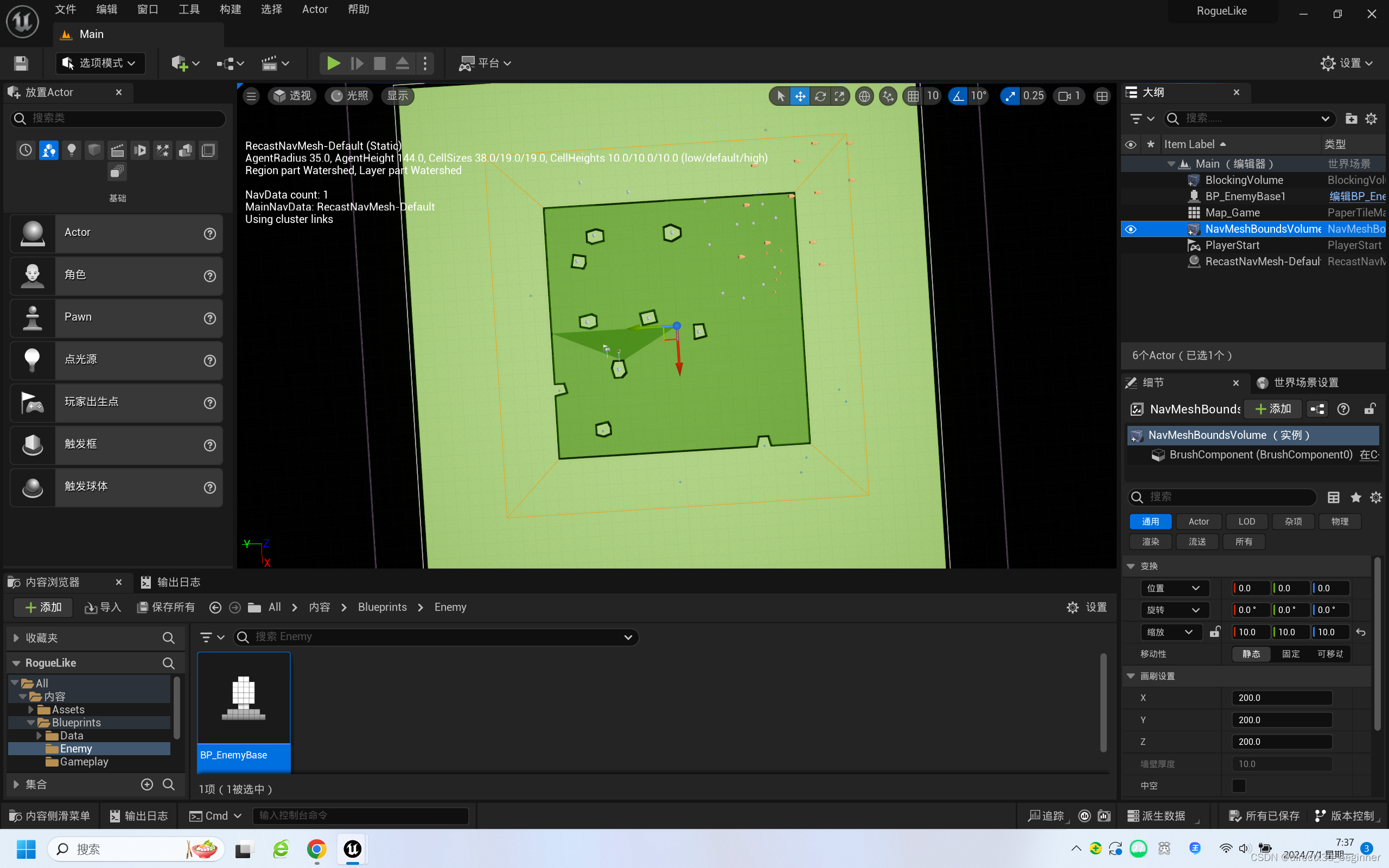
2,使导航网格边界体积覆盖AI所需要的场景(绿色区域),x,y,z在这里都扩大到原来的10倍
3,打开actor的“启用tick并开始”
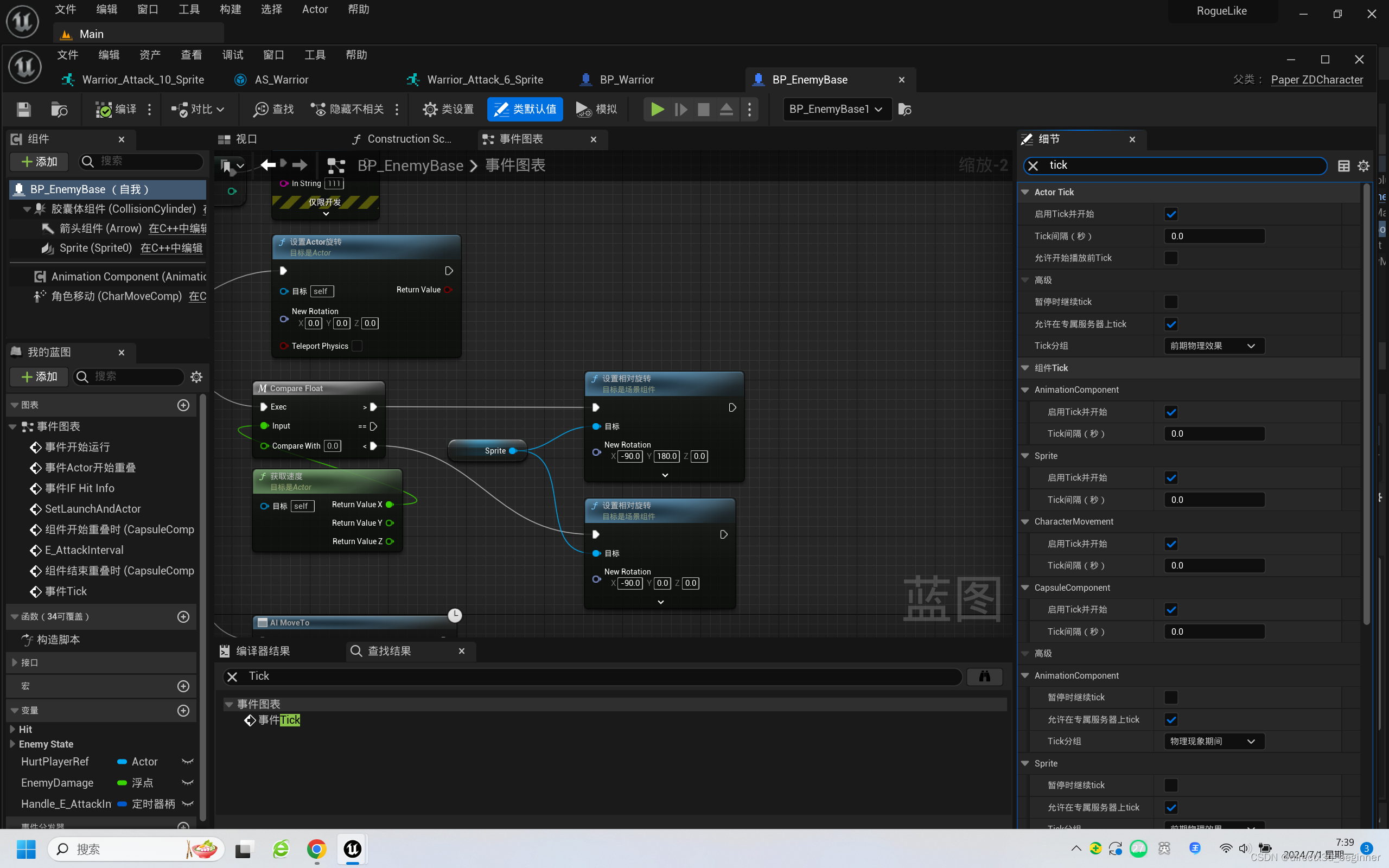
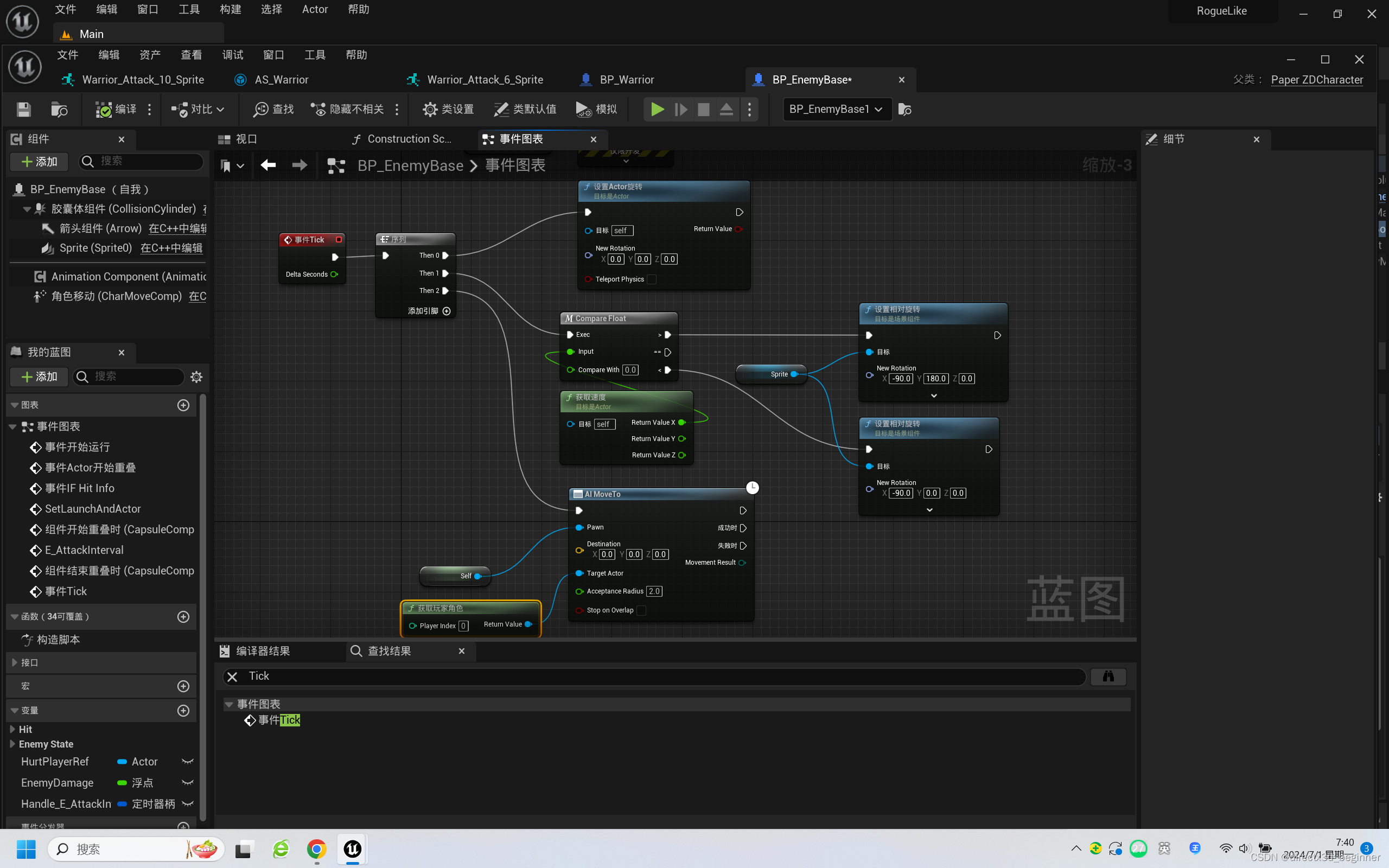
4,不使用AI行为树,只用AIMOVETO(优先用targetActor,其次是具体目标位置),这里的序列0和序列1考虑到AI的朝向。
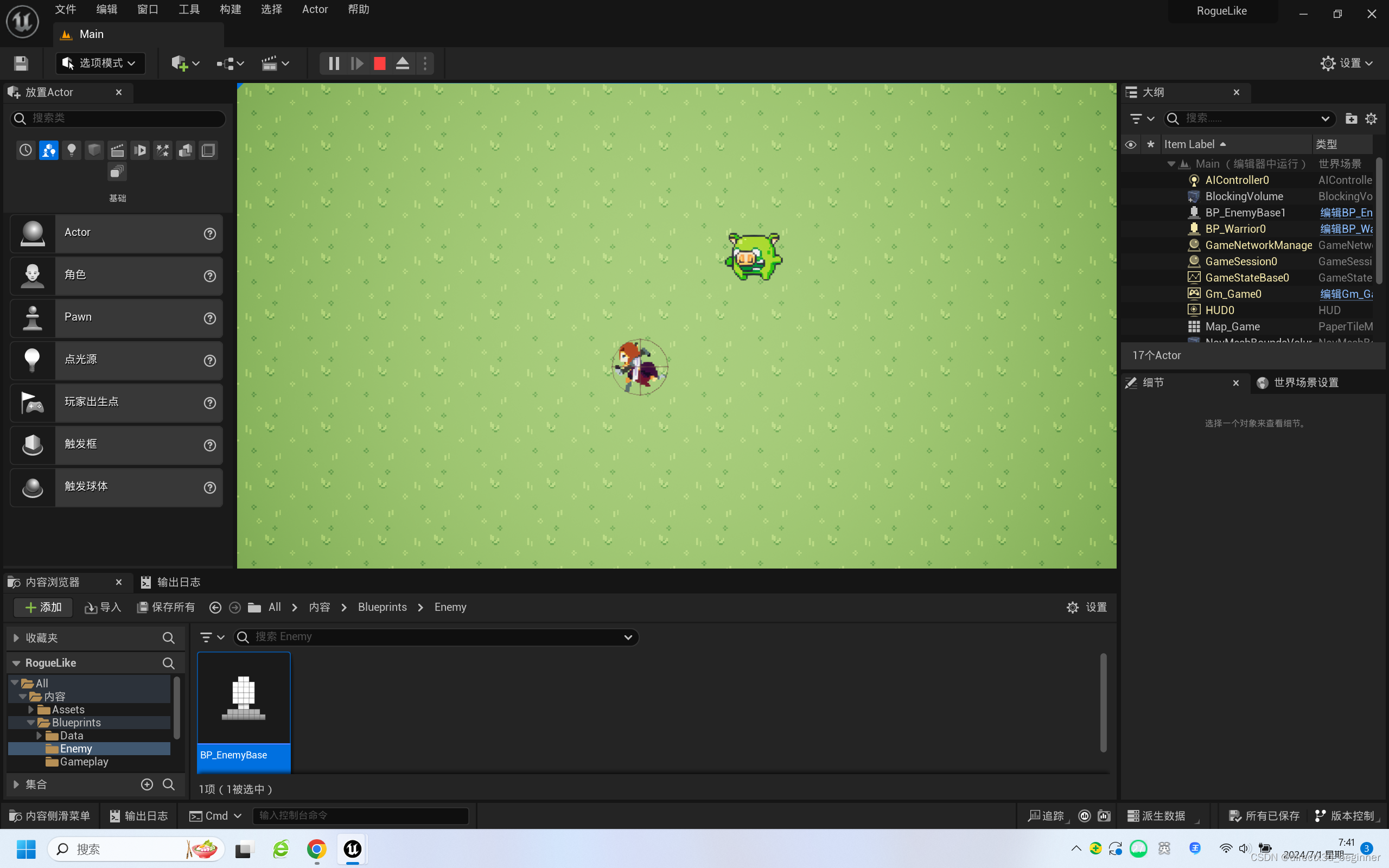
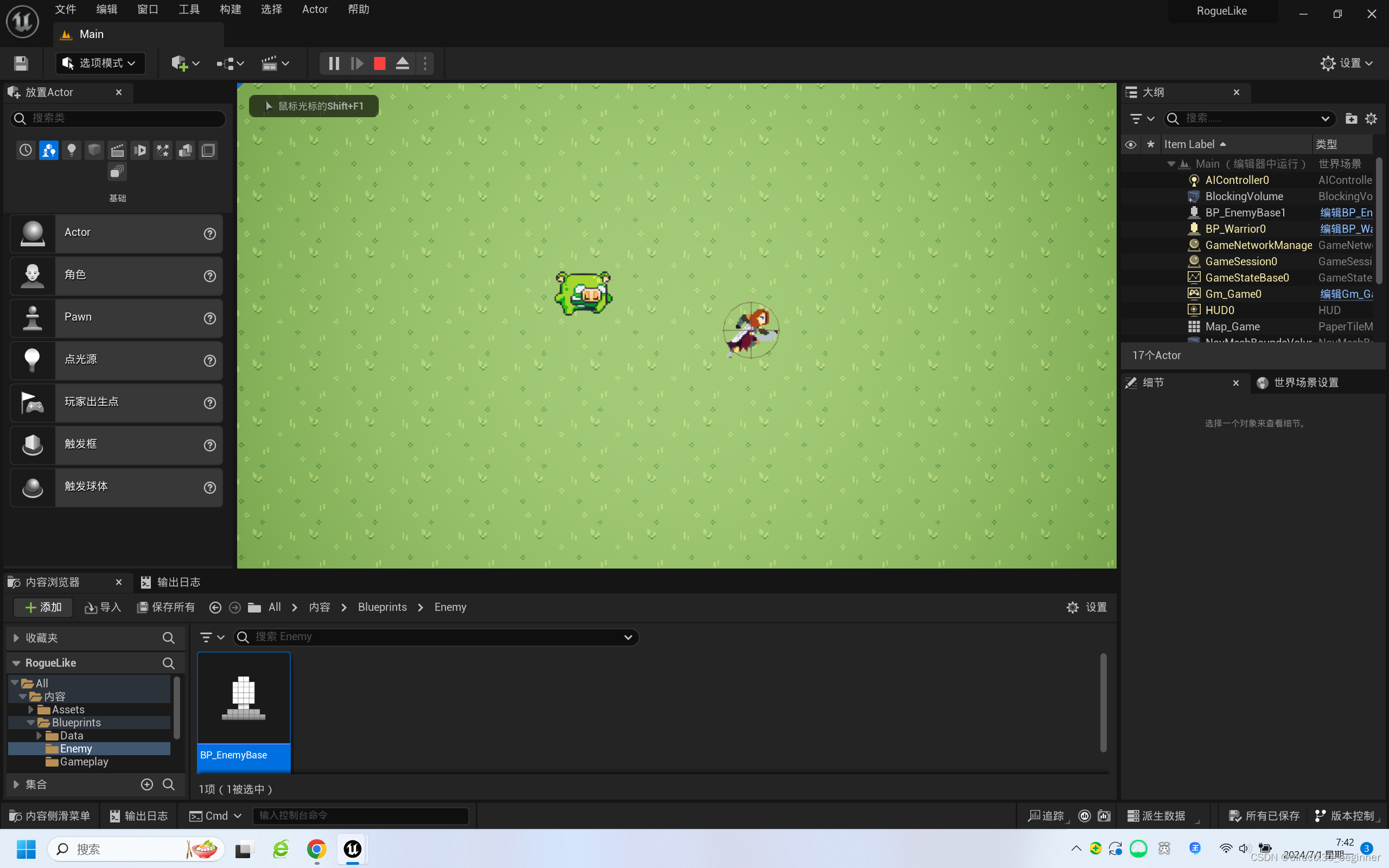
运行如下:
AI使用导航网格进行移动,所以,先设置导航网格边界体积
2,使导航网格边界体积覆盖AI所需要的场景(绿色区域),x,y,z在这里都扩大到原来的10倍
3,打开actor的“启用tick并开始”
4,不使用AI行为树,只用AIMOVETO(优先用targetActor,其次是具体目标位置),这里的序列0和序列1考虑到AI的朝向。
运行如下:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1892840.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!




![[el-form] 表单验证:一次验证两个值,传参](https://img-blog.csdnimg.cn/direct/d3dd77657e754dcfba05af04d2991572.png)