一、项目要求
实现自定义私有协议,如:pc端产生数据:02 56 38 ,“02”代表要发送数据的个数,“56”“38”需要写进RAM中。当按键信号到来时,将“56”“38”读出返回给PC端。
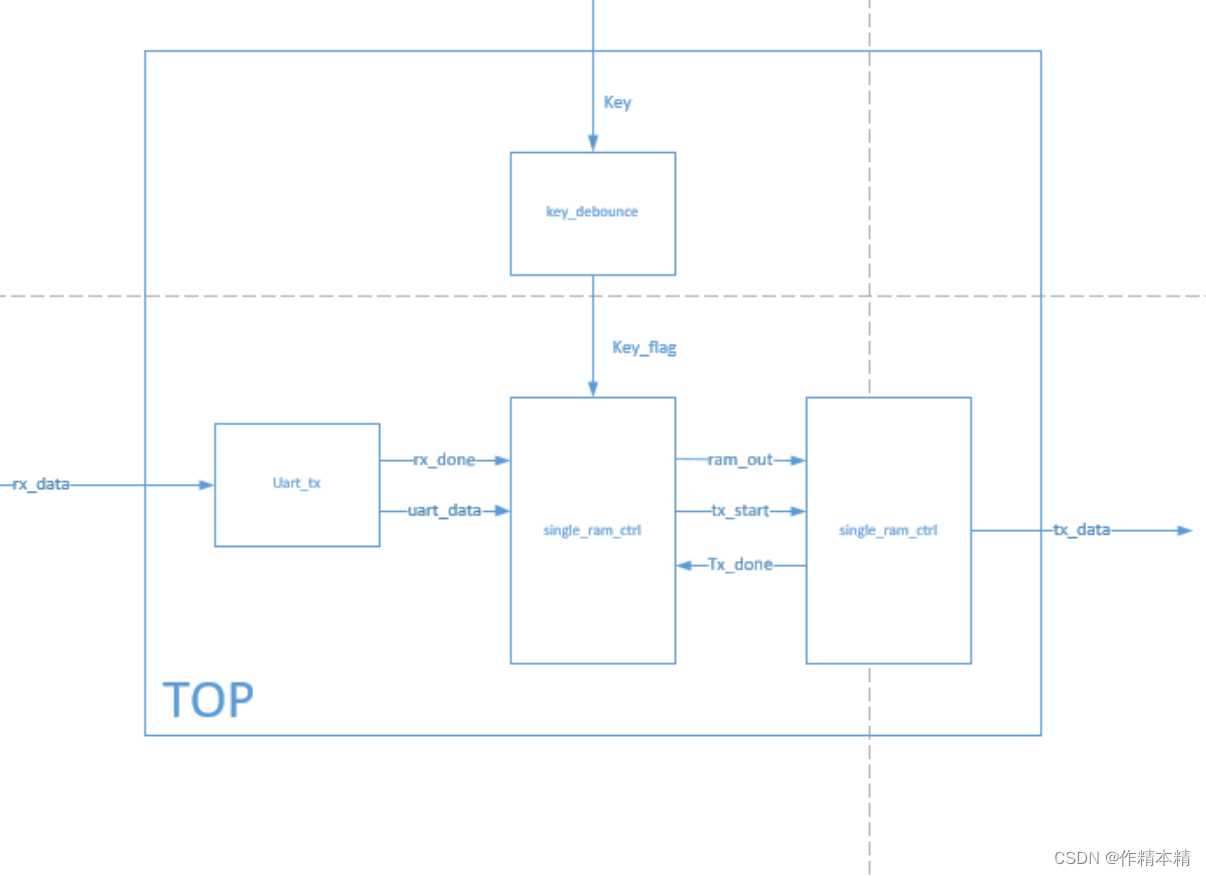
二、信号流向图
三、状态转换图

四、程序设计:
按键消抖模块:
`timescale 1ns / 1ps
module key_debounce(
input sys_clk ,
input rst_n ,
input key ,
output key_flag
);
parameter delay = 100;//_000_0 ; //10ms
reg[25:0] cnt ;
always@(posedge sys_clk )
if(!rst_n)
cnt <= 0 ;
else if ( key == 0 )begin
if ( cnt == delay - 1 )
cnt <= cnt ;
else
cnt <= cnt +1 ;
end
else
cnt <= 0 ;
assign key_flag = ( cnt == delay - 2 )?1:0 ;
endmodule
接收端模块:
`timescale 1ns / 1ps
module uart_rx(
input sys_clk ,
input rst_n ,
input rx_data ,
output reg[7:0] uart_data ,
output reg rx_done
);
parameter SYSCLK = 50_000_000 ;
parameter Baud = 115200 ;
parameter COUNT = SYSCLK/Baud;
parameter MID = COUNT/2 ;
///start_flag
reg rx_reg1 ;
reg rx_reg2 ;
wire start_flag ;
always@(posedge sys_clk )
if(!rst_n)begin
rx_reg1 <= 1 ;
rx_reg2 <= 1 ;
end
else
begin
rx_reg1 <= rx_data ;
rx_reg2 <= rx_reg1 ;
end
assign start_flag = ~rx_reg1 & rx_reg2 ;
//rx_flag
reg rx_flag ;
reg[4:0] cnt_bit ;
reg[9:0] cnt ;
always@(posedge sys_clk )
if(!rst_n)
rx_flag <= 0 ;
else if ( start_flag == 1 )
rx_flag <= 1 ;
else if ( cnt_bit == 10 && cnt == MID - 1 )
rx_flag <= 0 ;
else
rx_flag <= rx_flag ;
cnt
always@(posedge sys_clk )
if(!rst_n)
cnt <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt == COUNT - 1 )
cnt <= 0 ;
else
cnt <= cnt +1 ;
end
else
cnt <= 0 ;
cnt_bit
always@(posedge sys_clk )
if(!rst_n)
cnt_bit <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt == COUNT - 1 )begin
if( cnt_bit == 10 )
cnt_bit <= 0 ;
else
cnt_bit <= cnt_bit +1 ;
end
else
cnt_bit <= cnt_bit ;
end
else
cnt_bit <= 0 ;
///data_reg
reg[8:0] data_reg ; //data_reg:01234567 [8]
always@(posedge sys_clk ) //cnt_bit:[0]12345678[9][10]
if(!rst_n)
data_reg <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt_bit > 0 && cnt_bit < 10 && cnt == MID - 1)
data_reg[cnt_bit - 1 ] <= rx_data ;
else
data_reg <= data_reg ;
end
else
data_reg <= 0 ;
check
reg check ;
always@(posedge sys_clk )
if(!rst_n)
check <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt_bit == 10 )
check <= ^data_reg ;
else
check <= 0 ;
end
else
check <= 0 ;
uart_data
parameter MODE_CHECK = 0 ;
always@(posedge sys_clk )
if(!rst_n)
uart_data <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt_bit == 10 && cnt == 10 && check == MODE_CHECK)
uart_data <= data_reg[7:0] ;
else
uart_data <= uart_data ;
end
else
uart_data <= uart_data ;
rx_done
always@(posedge sys_clk )
if(!rst_n)
rx_done <= 0 ;
else if ( rx_flag == 1 )begin
if ( cnt_bit == 10 && cnt == MID/2 - 1 )
rx_done <= 1 ;
else
rx_done <= 0 ;
end
else
rx_done <= 0 ;
//做测试用的
// wire tx_done ;
// wire tx_data ;
// uart_tx uart_tx_u1(
// . sys_clk (sys_clk ) ,
// . rst_n (rst_n ) ,
// . ram_out (uart_data ) , //uart_data(douta)
// . tx_start (rx_done) , //rx_done
// . tx_done (tx_done ) ,
// . tx_data (tx_data )
// );
endmodule
发送端模块:
`timescale 1ns / 1ps
module uart_tx(
input sys_clk ,
input rst_n ,
input [7:0] ram_out , //uart_data(douta)
input tx_start , //rx_done
output reg tx_done ,
output reg tx_data
);
parameter SYSCLK = 50_000_000 ;
parameter Baud = 115200 ;
parameter COUNT = SYSCLK/Baud ;
parameter MID = COUNT/2 ;
//start_flag
reg tx_reg1 ;
reg tx_reg2 ;
wire start_flag ;
always@(posedge sys_clk )
if(!rst_n)begin
tx_reg1 <= 0 ;
tx_reg2 <= 0 ;
end
else
begin
tx_reg1 <= tx_start ;
tx_reg2 <= tx_reg1 ;
end
assign start_flag = tx_reg1 & ~tx_reg2 ;
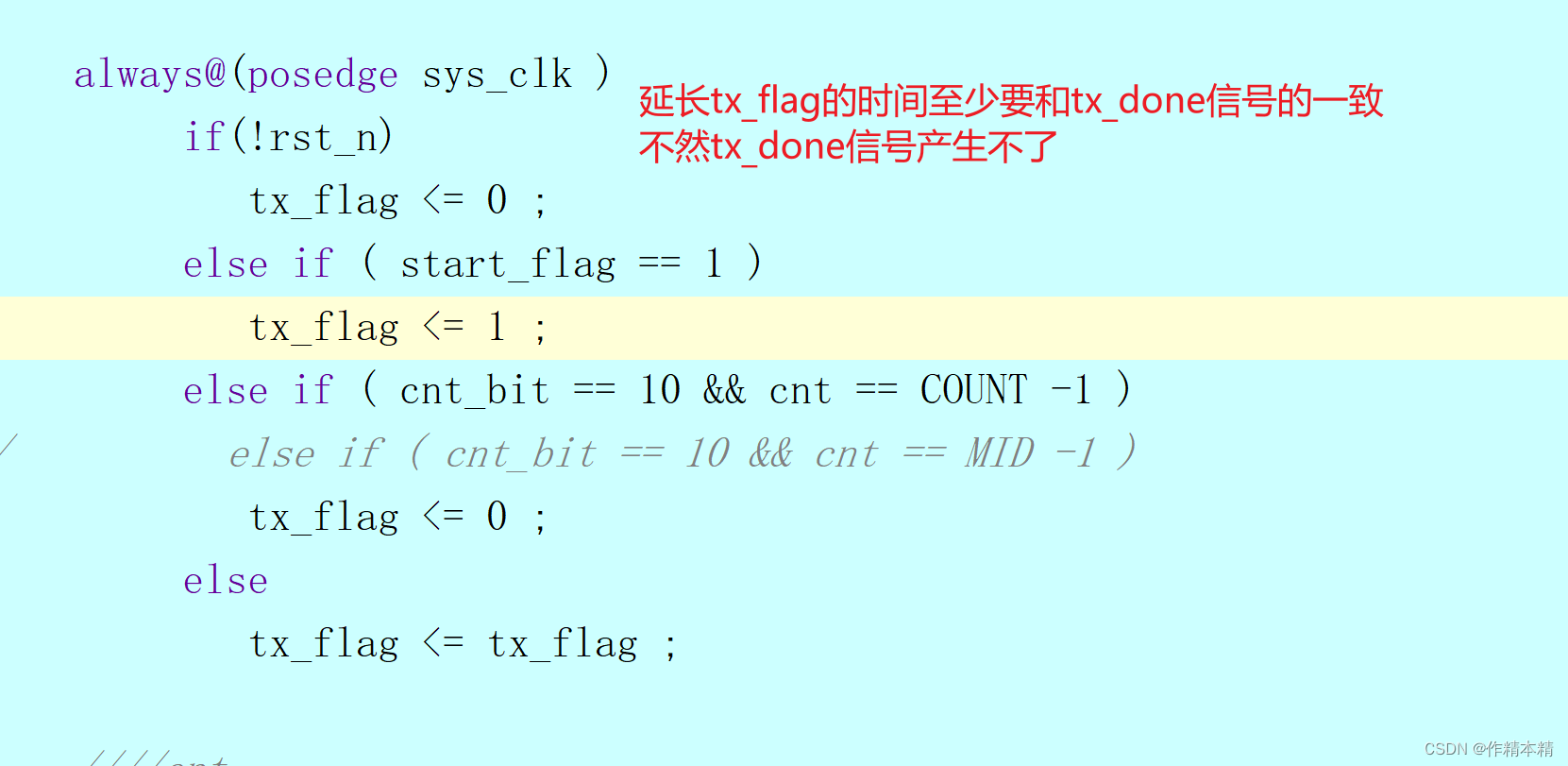
///tx_flag
reg tx_flag ;
reg[9:0] cnt ;
reg[4:0] cnt_bit ;
always@(posedge sys_clk )
if(!rst_n)
tx_flag <= 0 ;
else if ( start_flag == 1 )
tx_flag <= 1 ;
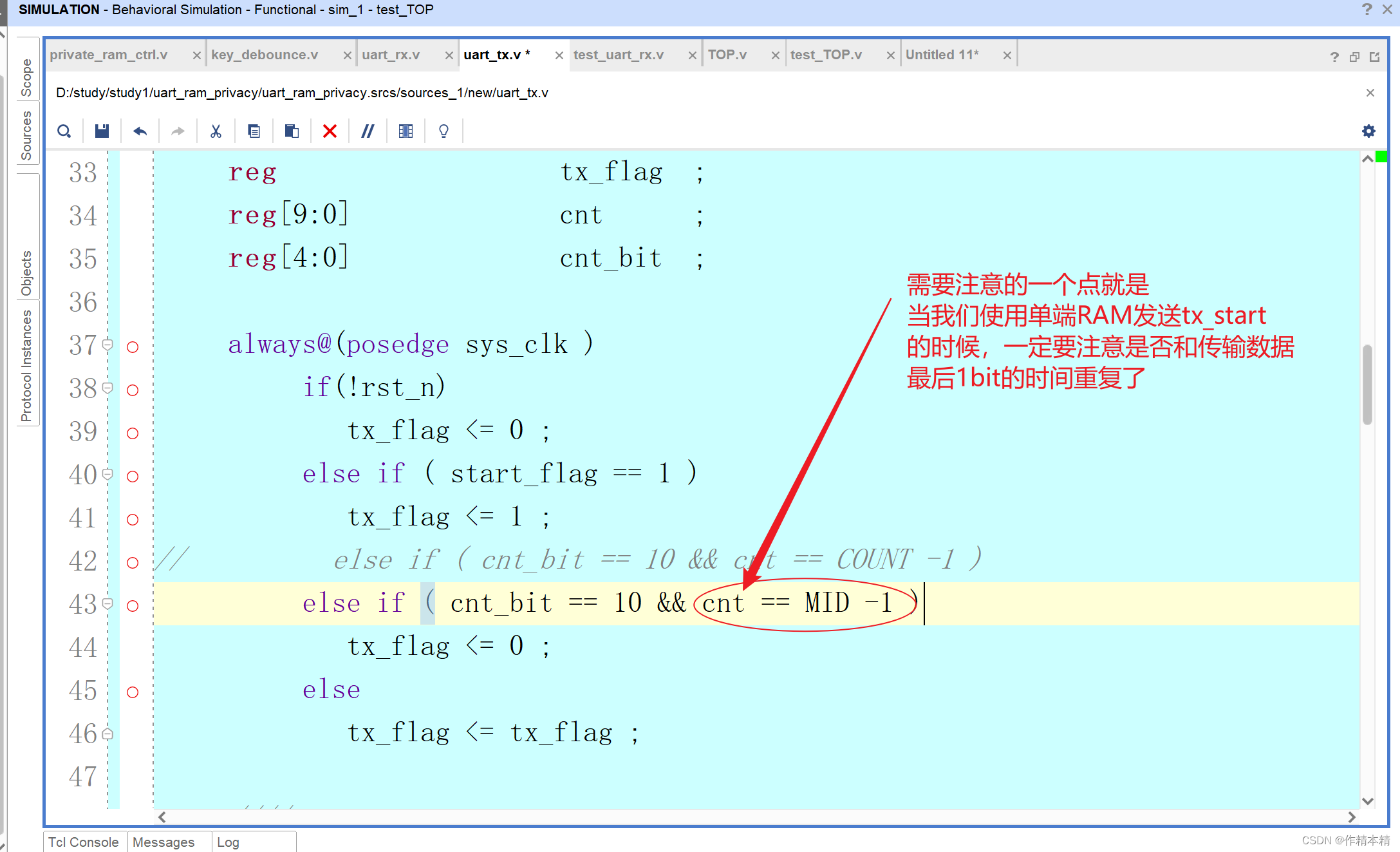
else if ( cnt_bit == 10 && cnt == COUNT -1 )
// else if ( cnt_bit == 10 && cnt == MID -1 )
tx_flag <= 0 ;
else
tx_flag <= tx_flag ;
cnt
always@(posedge sys_clk )
if(!rst_n)
cnt <= 0 ;
else if ( tx_flag == 1 )begin
if ( cnt == COUNT - 1 )
cnt <= 0 ;
else
cnt <= cnt +1 ;
end
else
cnt <= 0 ;
//cnt_bit
always@(posedge sys_clk )
if(!rst_n)
cnt_bit <= 0 ;
else if ( tx_flag == 1 )begin
if ( cnt == COUNT - 1 )begin
if ( cnt_bit == 10 )
cnt_bit <= 0 ;
else
cnt_bit <= cnt_bit +1 ;
end
else
cnt_bit <= cnt_bit ;
end
else
cnt_bit <= 0 ;
///tx_data
parameter MODE_CHECK = 0 ;
always@( posedge sys_clk )
if(!rst_n)
tx_data <= 1 ;
else if ( tx_flag == 1 )begin
if ( cnt_bit > 0 && cnt_bit < 9 )
tx_data <= ram_out[cnt_bit -1] ;
else if ( cnt_bit == 0 )
tx_data <= 0 ;
else if ( cnt_bit == 9 )
tx_data <= ( MODE_CHECK == 0 )? ^ram_out :~^ram_out ;
else if ( cnt_bit == 10 )
tx_data <= 1 ;
else
tx_data <= tx_data ;
end
else
tx_data <= 1 ;
//tx_done
always@(posedge sys_clk )
if(!rst_n)
tx_done <= 0 ;
else if ( tx_flag == 1 )begin
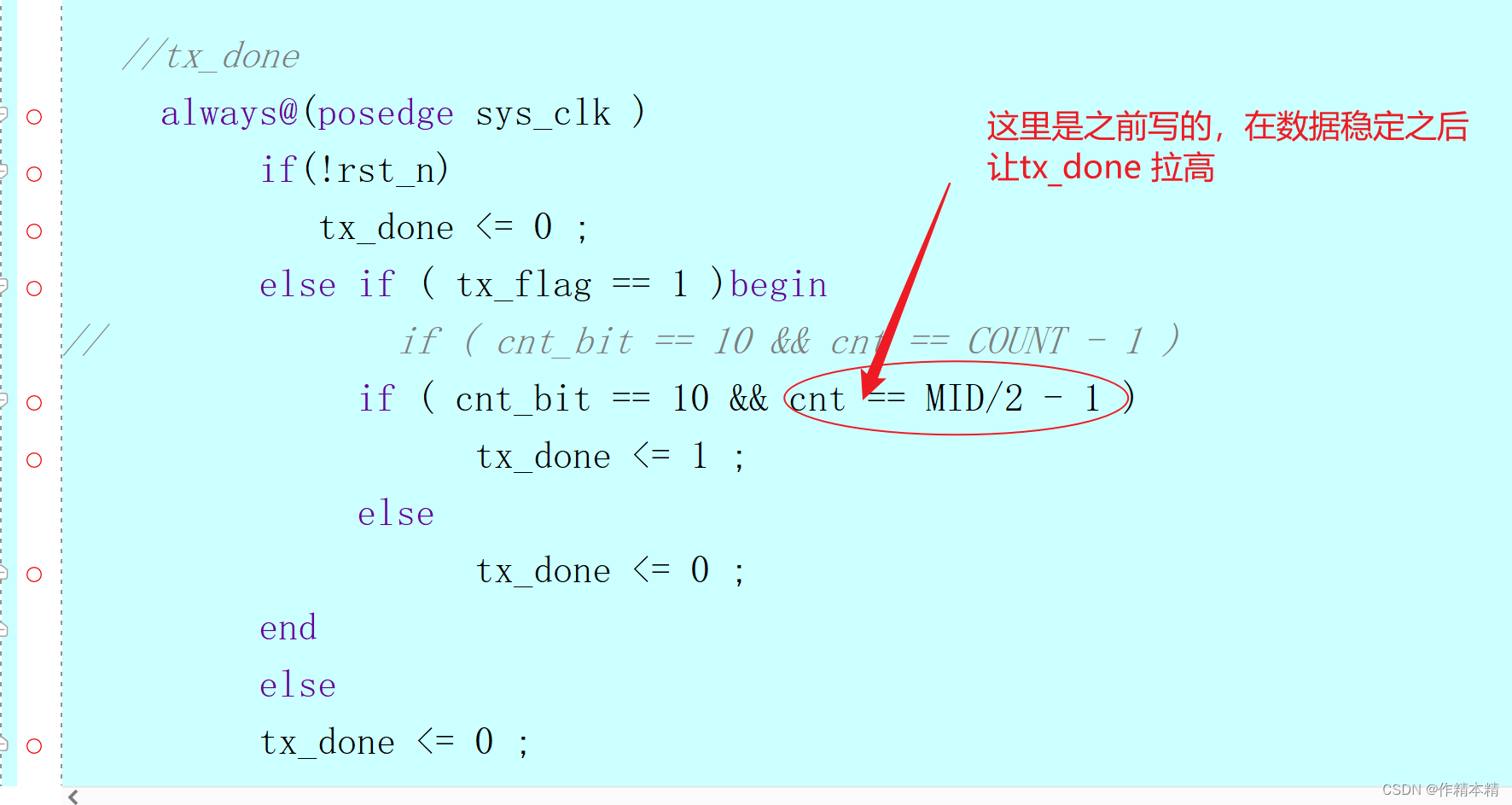
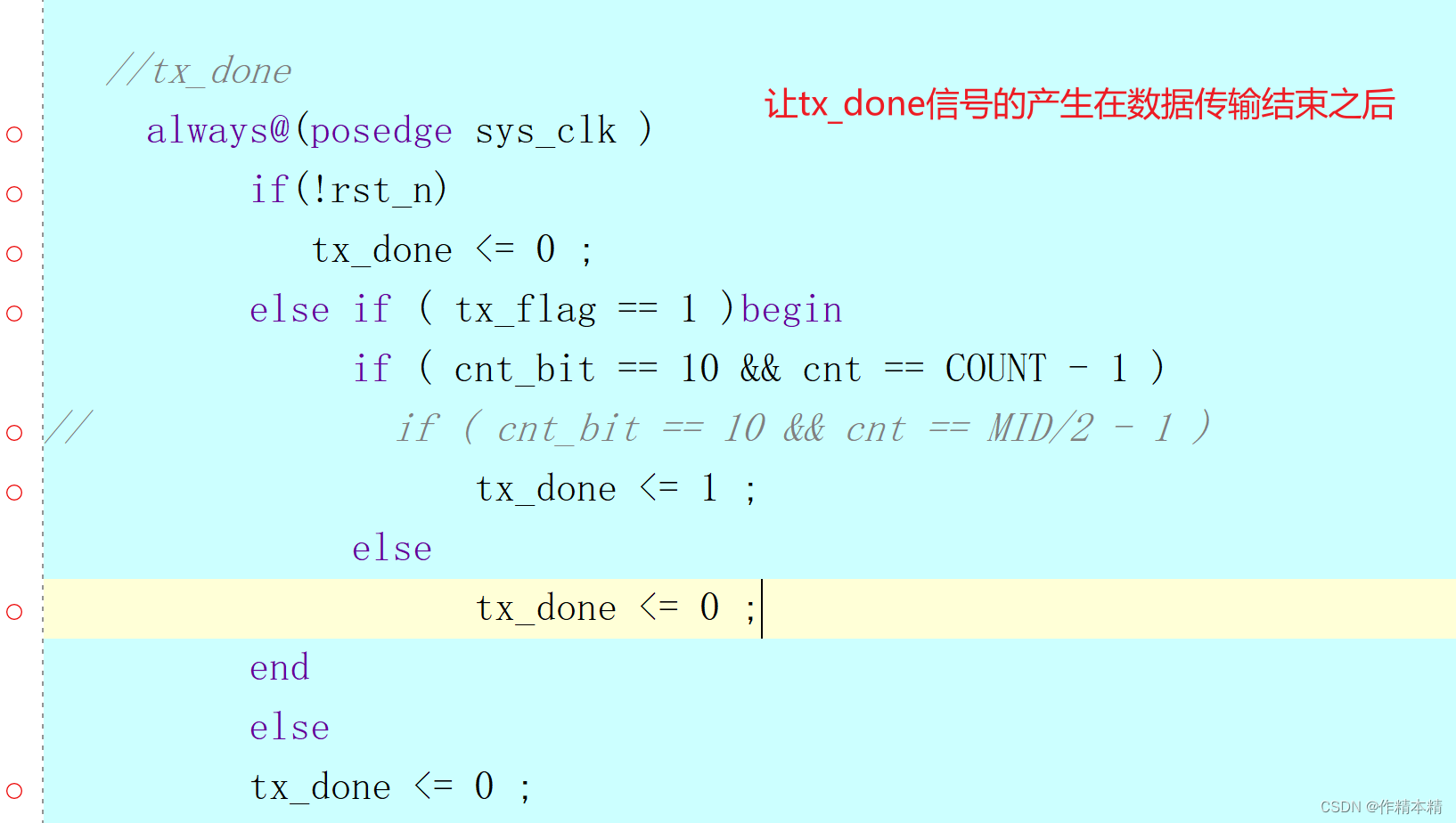
if ( cnt_bit == 10 && cnt == COUNT - 1 )
// if ( cnt_bit == 10 && cnt == MID/2 - 1 )
tx_done <= 1 ;
else
tx_done <= 0 ;
end
else
tx_done <= 0 ;
endmodule
RAM模块:
`timescale 1ns / 1ps
module private_ram_ctrl(
input sys_clk ,
input rst_n ,
input key_flag ,
input [7:0] uart_data ,
input rx_done ,
input tx_done ,
output reg[7:0] ram_out ,
output reg tx_start
);
reg wea ;
reg[3:0] addra ;
reg[7:0] dina ;
wire[7:0] douta ;
//状态机
localparam IDLE = 3'd0 ;
localparam WR_D = 3'd1 ;
localparam WAIT = 3'd2 ;
localparam TX_FIR = 3'd3 ;
localparam TX_D = 3'd4 ;
reg[2:0] cur_state ;
reg[2:0] next_state ;
reg[7:0] wr_len ;
reg[7:0] wr_cnt ;
always@(posedge sys_clk )
if(!rst_n)
cur_state <= IDLE ;
else
cur_state <= next_state ;
always@(*)
case(cur_state)
IDLE :
begin
if (rx_done)//指令数据的接收完成信号
next_state = WR_D ;
else
next_state = cur_state ;
end
WR_D :
begin
if( wr_len == wr_cnt )
next_state = WAIT ;
else
next_state = cur_state ;
end
WAIT :
begin
if( key_flag )
next_state = TX_FIR ;
else
next_state = cur_state ;
end
TX_FIR :
begin
next_state = TX_D ;
end
TX_D :
begin
if ( wr_len == wr_cnt )
next_state = IDLE ;
else
next_state = cur_state ;
end
default:;
endcase
always@(posedge sys_clk )
if(!rst_n)begin
wr_len <= 0 ;
wr_cnt <= 0 ;
wea <= 0 ;
addra <= 4'hf ;利用溢出功能 15
dina <= 0 ;
tx_start <= 0 ;
ram_out <= 0 ; ///ram_out <= douta
end
else
case(cur_state)
IDLE :
begin
wr_len <= 0 ;
wr_cnt <= 0 ;
wea <= 0 ;
dina <= 0 ;
addra <= 4'hf ;
tx_start <= 0 ;
if(rx_done)
wr_len <= uart_data ;
else
wr_len <= wr_len ;
end
WR_D :
begin
tx_start <= 0 ;
if ( rx_done )begin
addra <= addra +1 ;
wea <= 1 ;
wr_cnt <= wr_cnt +1 ;
dina <= uart_data ;
end
else
wea <= 0 ;//其他的不用写会自动保持
end
WAIT :
begin
tx_start <= 0 ;
addra <= 0 ;//保证发送数据的时候是从0开始发的
dina <= 0 ;
wr_cnt <= 0 ;
end
TX_FIR: //只待一个时钟周期
begin
tx_start <= 1 ;
addra <= addra + 1 ; //addra从0开始加
wr_cnt <= wr_cnt +1 ;
ram_out <= douta ;
end
TX_D :
begin
if(tx_done)begin
tx_start <= 1 ;
addra <= addra +1 ;
wr_cnt <= wr_cnt +1;
ram_out <= douta ;
end
else
tx_start <= 0 ;
end
default:;
endcase
single_ram your_instance_name (
.clka(sys_clk), // input wire clka
.wea(wea), // input wire [0 : 0] wea
.addra(addra), // input wire [3 : 0] addra
.dina(dina), // input wire [7 : 0] dina
.douta(douta) // output wire [7 : 0] douta
);
endmodule
顶层模块:
`timescale 1ns / 1ps
module TOP(
input sys_clk ,
input rst_n ,
input key ,
input rx_data ,
output tx_data
);
///key_debounce
wire key_flag ;
key_debounce key_debounce_u1(
. sys_clk (sys_clk ) ,
. rst_n (rst_n ) ,
. key (key ) ,
. key_flag (key_flag)
);
//private_ram_ctrl
wire[7:0] uart_data ;
wire rx_done ;
wire tx_done ;
wire[7:0] ram_out ;
wire tx_start ;
private_ram_ctrl private_ram_ctrl_u1(
. sys_clk (sys_clk ) ,
. rst_n (rst_n ) ,
. key_flag (key_flag ) ,
. uart_data (uart_data) ,
. rx_done (rx_done ) ,
. tx_done (tx_done ) ,
. tx_start (tx_start) ,
. ram_out (ram_out )
);
/uart_rx
uart_rx uart_rx_u2(
. sys_clk (sys_clk ) ,
. rst_n (rst_n ) ,
. rx_data (rx_data ) ,
. uart_data (uart_data) ,
. rx_done (rx_done )
);
uart_tx
uart_tx uart_tx_u1(
. sys_clk (sys_clk ), //sys_clk ,
. rst_n (rst_n ), //rst_n ,
. ram_out (ram_out ), //ram_out , //uart_data(douta)
. tx_start (tx_start), //tx_start , //rx_done
. tx_done (tx_done ), //tx_done ,
. tx_data (tx_data ) //tx_data
);
endmodule
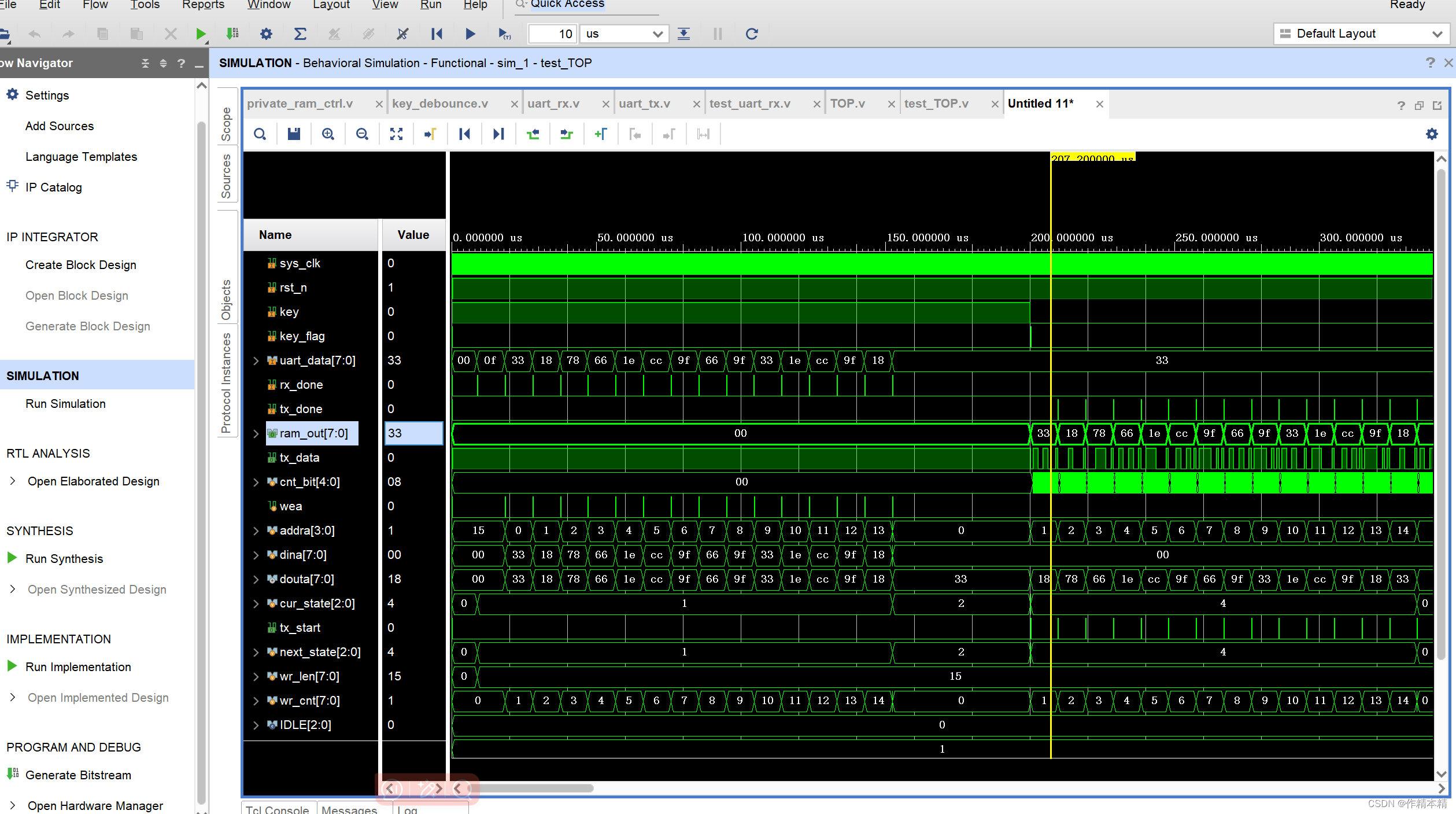
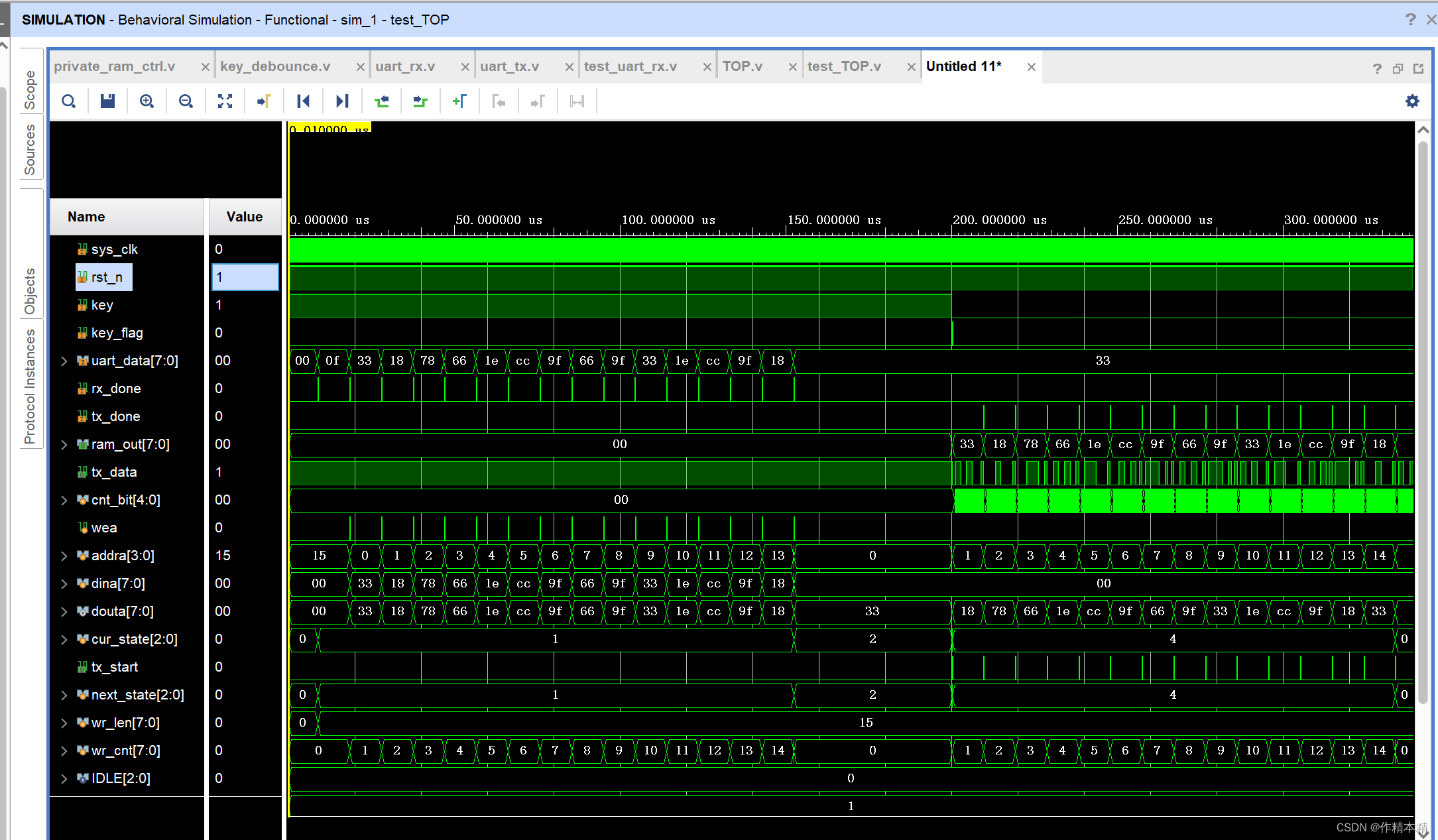
五、仿真结果
仿真uart_rx模块:
`timescale 1ns / 1ps
module test_uart_rx( );
reg sys_clk ;
reg rst_n ;
reg rx_data ;
wire[7:0] uart_data ;
wire rx_done ;
parameter SYSCLK = 50_000_000 ;
parameter Baud = 115200 ;
parameter COUNT = SYSCLK/Baud;
parameter MID = COUNT/2 ;
initial
begin
sys_clk = 0 ;
rst_n = 0 ;
#10
rst_n = 1 ;
end
always #1 sys_clk = ~sys_clk ;
initial
begin
uart_out ( 8'hCC );
uart_out ( 8'hC8 );
uart_out ( 8'h18 );
uart_out ( 8'h78 );
uart_out ( 8'h66 );
uart_out ( 8'h1E );
uart_out ( 8'hCC );
uart_out ( 8'h9F );
uart_out ( 8'h66 );
uart_out ( 8'h9F );
uart_out ( 8'h33 );
uart_out ( 8'h1E );
uart_out ( 8'hCC );
uart_out ( 8'h9F );
uart_out ( 8'h18 );
uart_out ( 8'h33 );
uart_out ( 8'hCC );
end
//任务函数
task uart_out ;
input [8:0] DATA ;
begin
rx_data = 1 ; ///空闲位初始
#20
rx_data = 0 ;
#(COUNT*2) rx_data = DATA[0] ;
#(COUNT*2) rx_data = DATA[1] ;
#(COUNT*2) rx_data = DATA[2] ;
#(COUNT*2) rx_data = DATA[3] ;
#(COUNT*2) rx_data = DATA[4] ;
#(COUNT*2) rx_data = DATA[5] ;
#(COUNT*2) rx_data = DATA[6] ;
#(COUNT*2) rx_data = DATA[7] ;
#(COUNT*2) rx_data = 0 ;
#(COUNT*2) rx_data = 1 ;
#(COUNT*2) ;
end
endtask
uart_rx uart_rx_u1(
. sys_clk (sys_clk ) ,
. rst_n (rst_n ) ,
. rx_data (rx_data ) ,
. uart_data (uart_data) ,
. rx_done (rx_done )
);
endmodule仿真TOP模块:
`timescale 1ns / 1ps
module test_TOP( );
reg sys_clk ;
reg rst_n ;
reg key ;
reg rx_data ;
wire tx_data ;
parameter SYSCLK = 50_000_000 ;
parameter Baud = 115200 ;
parameter COUNT = SYSCLK/Baud;
parameter MID = COUNT/2 ;
initial
begin
sys_clk = 0 ;
rst_n = 0 ;
key = 1 ;
#10
rst_n = 1 ;
#200000//ns 200us
key = 0 ;
// #200000
// key = 1 ;
// #200000
// key = 0 ;
// #200000
// key = 1 ;
end
always #1 sys_clk = ~sys_clk ;
initial
begin
// uart_out ( 8'hf );//0f 0000_1111
// uart_out ( 8'h0f );
// uart_out ( 8'hff );
uart_out ( 8'h0f );
uart_out ( 8'h33 );
// uart_out ( 8'hff );//1111_1111
uart_out ( 8'h18 );//0001_1000
uart_out ( 8'h78 );
uart_out ( 8'h66 );
uart_out ( 8'h1E );
uart_out ( 8'hCC );
uart_out ( 8'h9F );
uart_out ( 8'h66 );
uart_out ( 8'h9F );
uart_out ( 8'h33 );
uart_out ( 8'h1E );
uart_out ( 8'hCC );
uart_out ( 8'h9F );
uart_out ( 8'h18 );
uart_out ( 8'h33 );
end
//任务函数
task uart_out ;
input [8:0] DATA ;
begin
rx_data = 1 ; ///空闲位初始
#20
rx_data = 0 ;
#(COUNT*2) rx_data = DATA[0] ;
#(COUNT*2) rx_data = DATA[1] ;
#(COUNT*2) rx_data = DATA[2] ;
#(COUNT*2) rx_data = DATA[3] ;
#(COUNT*2) rx_data = DATA[4] ;
#(COUNT*2) rx_data = DATA[5] ;
#(COUNT*2) rx_data = DATA[6] ;
#(COUNT*2) rx_data = DATA[7] ;
#(COUNT*2) rx_data = 0 ;
#(COUNT*2) rx_data = 1 ;
#(COUNT*2) ;
end
endtask
TOP TOP_u1(
. sys_clk (sys_clk) ,
. rst_n (rst_n ) ,
. key (key ) ,
. rx_data (rx_data) ,
. tx_data (tx_data)
);
endmodule
这里记录一些小小的问题:
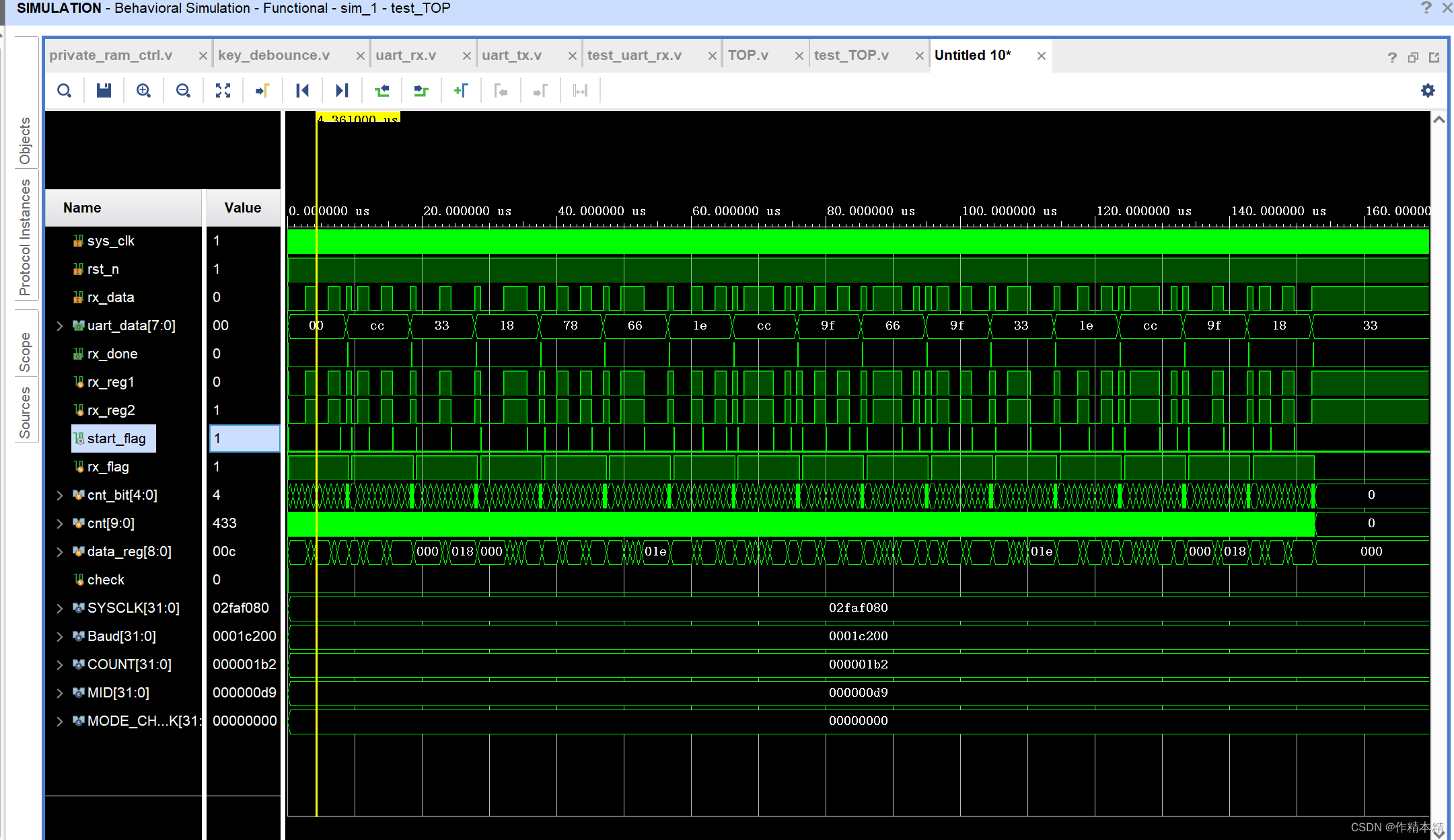
(1)
仿真的复位信号一定不要和数据的关键信号(使能/开始)重复。
这个是正常没重复的:
这个是由于复位拉高的时间过长造成重复了的:
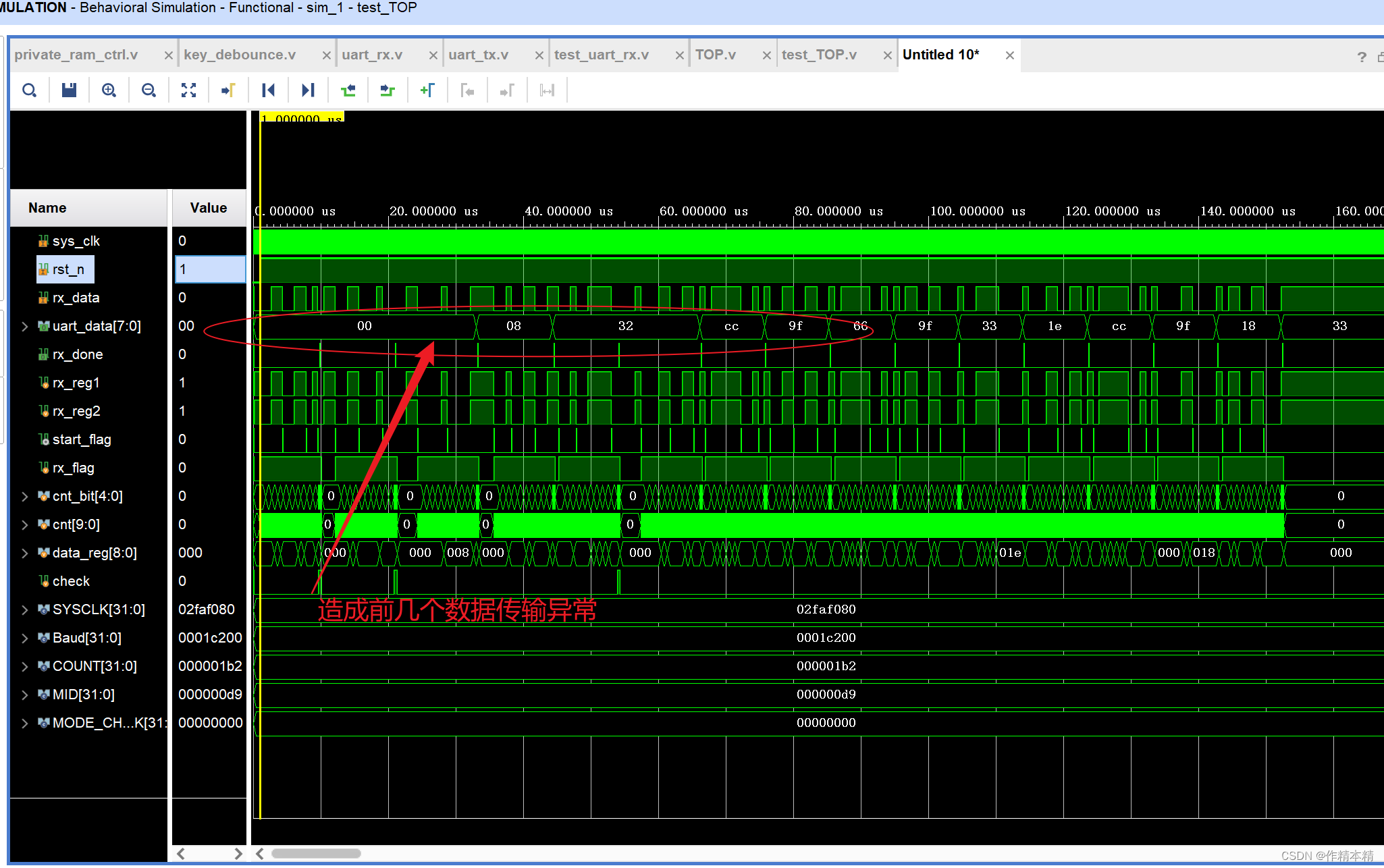
(2)
因此我们可以做出如下的修改:
现在就正常了