Simulink中的实例
推文《机器人控制系列教程之任务空间运动控制器搭建(1)》中,我们详细的讲解了Simulink中的taskSpaceMotionModel模块,实现的方式可以按照如下的步骤。
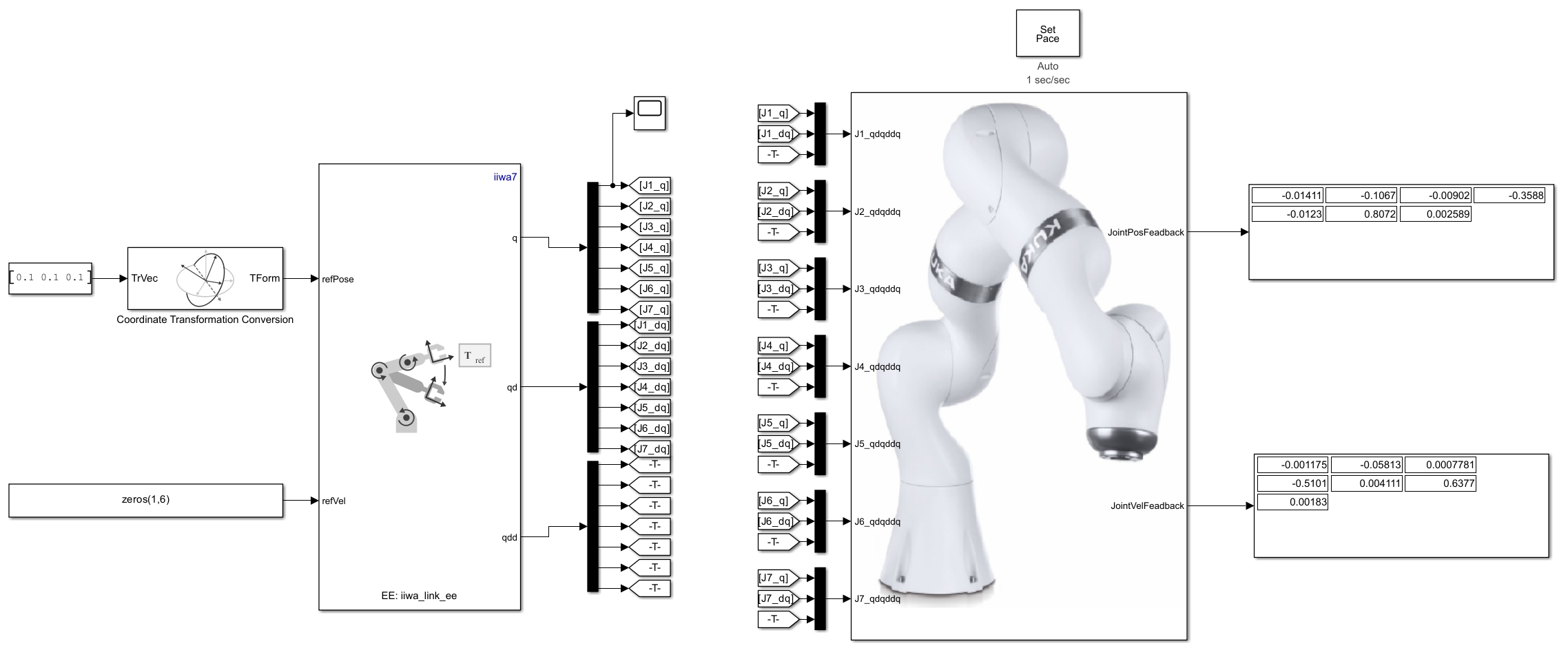
可以控制器模型替换为taskSpaceMotionModel模块后,该模块的输入分别为一个4 * 4的齐次矩阵和一个1 * 6的速度矩阵,模块中的设置可按照如下方式进行。

m文件实现
编写m程序文件也可实现对机器人的任务空间的控制具体步骤如下:
1.导入机器人模型
导入我们之前使用的iiwa7机器人模型,设置重力方向和大小。
clear; clc;
close all;
iiwa7 = importrobot('iiwa7.urdf');
iiwa7.DataFormat='column';
iiwa7.Gravity = [0 0 -9.81];
2.设置仿真参数
设置仿真时间0到1s,步长为0.02s,设置机器人的初始状态:home构型+零初始速度。
tspan = 0:0.02:1;
initialState = [homeConfiguration(iiwa7);zeros(7,1)];
3.设置任务空间目标位置
定义一个参考目标状态,包括目标位置和零初始速度,此时旋转矩阵为I,位置向量变为[0.6 -0.1 0.5]。
refPose = trvec2tform([0.6 -.1 0.5]);
refVel = zeros(6,1);
4.创建运动模型
在比例微分(PD)控制下进行系统建模,指定iiwa7刚体树模型,指定末端执行器模型.
motionModel = taskSpaceMotionModel("RigidBodyTree",iiwa7,"EndEffectorName","EndEffector_Link");
5.开始计算
使用刚性求解器在1秒钟内进行仿真,以更有效地捕获机器人动力学,使用ode15可以在变化率较高的区域周围实现更高的精度。
[t,iiwa7State] = ode15s(@(t,state)derivative(motionModel,state,refPose,refVel),tspan,initialState);
6.绘制机器人模型和仿真
% 画出机器人的位置,并将目标位置用符号"X"标记出来
figure
show(iiwa7,initialState(1:7));
hold all
plot3(refPose(1,4),refPose(2,4),refPose(3,4),"x","MarkerSize",20)
% 通过将机器人绘制成5Hz循环来观察响应
r = rateControl(5);
for i = 1:size(iiwa7State,1)
show(iiwa7,iiwa7State(i,1:7)',"PreservePlot",false);
% 画出末端轨迹
poseNow = getTransform(iiwa7, iiwa7State(i, 1: 7)', "iiwa_link_7");
plot3(poseNow(1,4),poseNow(2,4),poseNow(3,4),'b.','MarkerSize',20)
waitfor(r);
end
参考资料
- https://blog.csdn.net/qq_26565435/article/details/104506585
往期推荐