本文是将《ROS在rviz中实时显示轨迹和点》博客中rviz轨迹显示转为ROS2环境中的rviz2显示。
ros2的工作空间创建这里就不展示了。
包的创建
ros2 pkg create --build-type ament_cmake showpath --dependencies rclcpp nav_msgs geometry_msgs tf2_geometry_msgs
showpath.cpp文档创建
#include <rclcpp/rclcpp.hpp>
#include <nav_msgs/msg/path.hpp>
#include <geometry_msgs/msg/point_stamped.hpp>
#include <geometry_msgs/msg/pose_stamped.hpp>
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
#include <cstdlib>
#include <cmath>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("showpath");
auto path_pub = node->create_publisher<nav_msgs::msg::Path>("trajectory", 1);
auto point_pub = node->create_publisher<geometry_msgs::msg::PointStamped>("point", 1);
rclcpp::Time current_time, last_time;
current_time = node->now();
last_time = node->now();
nav_msgs::msg::Path path;
path.header.stamp = current_time;
path.header.frame_id = "odom";
double x = 0.0;
double y = 0.0;
double z = 0.0;
double th = 0.0;
double vx = 0.1 + 0.2 * std::rand() / double(RAND_MAX);
double vy = -0.1 + 0.2 * std::rand() / double(RAND_MAX);
double vth = 0.1;
rclcpp::Rate loop_rate(10);
while (rclcpp::ok())
{
current_time = node->now();
double dt = 1.0;
double delta_x = (vx * std::cos(th) - vy * std::sin(th)) * dt;
double delta_y = (vx * std::sin(th) + vy * std::cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
z += 0.005;
th += delta_th;
geometry_msgs::msg::PoseStamped this_pose_stamped;
geometry_msgs::msg::PointStamped this_point_stamped;
this_pose_stamped.pose.position.x = x;
this_pose_stamped.pose.position.y = y;
this_pose_stamped.pose.position.z = z;
this_point_stamped.header.stamp = current_time;
this_point_stamped.header.frame_id = "odom";
this_point_stamped.point.x = x;
this_point_stamped.point.y = y;
this_point_stamped.point.z = z;
RCLCPP_INFO(node->get_logger(), "current_x: %f", x);
RCLCPP_INFO(node->get_logger(), "current_y: %f", y);
RCLCPP_INFO(node->get_logger(), "pos: (%f, %f)", x, y);
// auto goal_quat = tf2::createQuaternionMsgFromYaw(th);
// this_pose_stamped.pose.orientation = goal_quat;
tf2::Quaternion orientation;
orientation.setRPY(0, 0, th);
geometry_msgs::msg::Quaternion orientation_msg = tf2::toMsg(orientation);
this_pose_stamped.pose.orientation = orientation_msg;
this_pose_stamped.header.stamp = current_time;
this_pose_stamped.header.frame_id = "odom";
path.poses.push_back(this_pose_stamped);
path_pub->publish(path);
point_pub->publish(this_point_stamped);
rclcpp::spin_some(node);
last_time = current_time;
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
CMakeLists.txt中添加
add_executable(showpath src/showpath.cpp)
ament_target_dependencies(showpath rclcpp nav_msgs geometry_msgs tf2_geometry_msgs)
install(TARGETS
showpath
DESTINATION lib/${PROJECT_NAME})
编译
colcon build
运行
source install/setup.bash
ros2 run showpath showpath
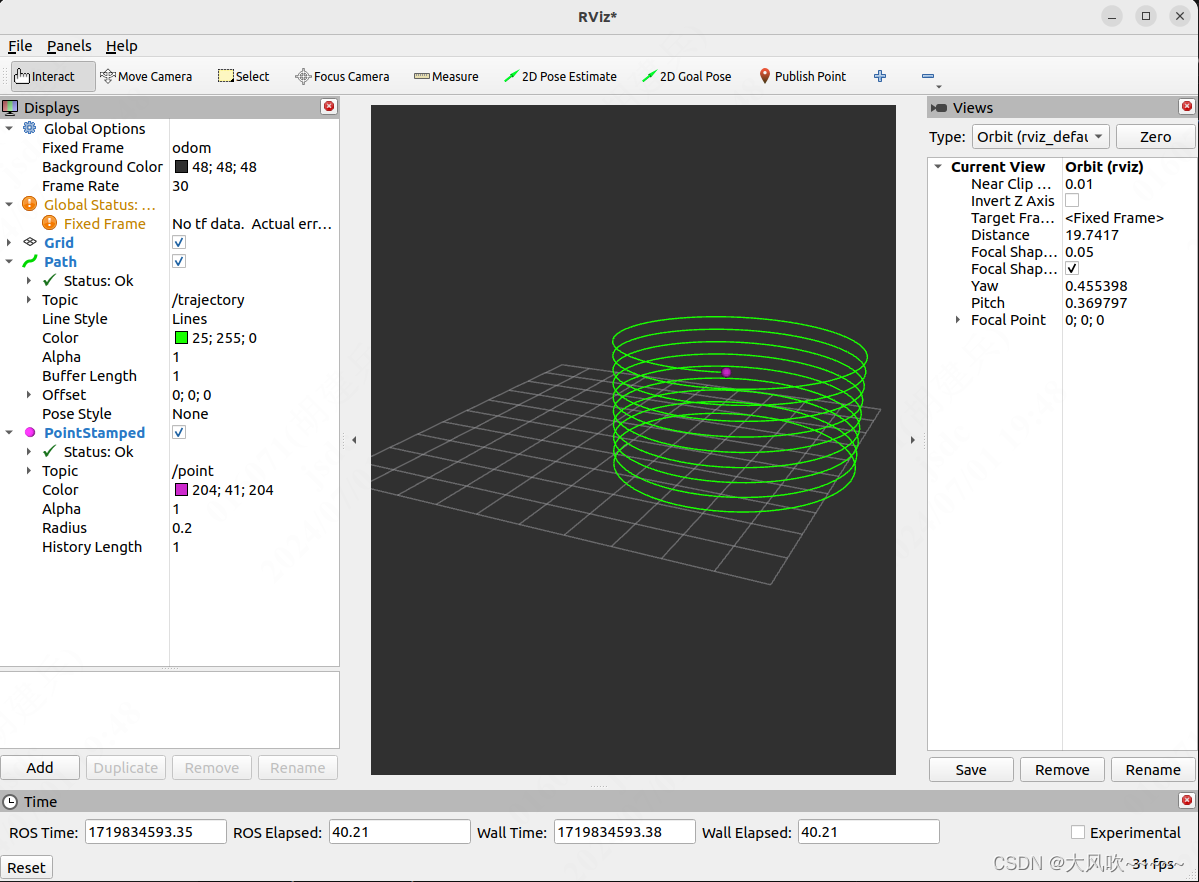
运行rviz2
ros2 run rviz2 rviz2
rviz配置见https://blog.csdn.net/gophae/article/details/108514336
效果