目录
一、概述
1.1简介
1.2RANSAC在点云粗配准中的应用步骤
二、代码实现
2.1关键函数
2.2完整代码
2.3代码解析
2.3.1计算FPFH
1. 法线估计
2. 计算FPFH特征
2.3.2 全局配准
1.函数:execute_global_registration
2.距离阈值
3.registration_ransac_based_on_feature_matching函数
三、实现效果
3.1原始点云
3.2配准后点云
一、概述
1.1简介
RANSAC(Random Sample Consensus)是一种迭代方法,用于从一组包含离群点的数据中估计模型参数。它特别适合处理包含大量噪声或离群点的数据。RANSAC在点云配准、图像拼接、3D重建等领域中广泛应用。
RANSAC(Random Sample Consensus)在点云粗配准中的应用主要包括以下步骤:特征提取、特征匹配、模型拟合、内点验证和迭代优化。
1.2RANSAC在点云粗配准中的应用步骤
- 特征提取:从点云中提取特征点及其特征描述符。常用的特征描述符有FPFH(Fast Point Feature Histograms)等。
- 特征匹配:将源点云和目标点云的特征描述符进行匹配,得到初始对应关系。这些匹配关系可能包含很多误匹配。
- 随机采样:从匹配的特征对中随机选择一定数量的样本,用于模型拟合。样本的数量应足以确定一个唯一的变换模型。
- 模型拟合:使用选定的样本对估计一个变换模型(通常是一个刚体变换,包括旋转和平移)。
- 内点验证:使用拟合的模型对所有匹配对进行验证,计算匹配点对之间的距离,判断是否符合模型。符合模型的点对被称为内点。
- 评估模型:计算当前模型的内点数量,并与之前的最佳模型进行比较。如果当前模型的内点数量更多,则更新最佳模型。
- 迭代优化:重复上述步骤一定次数(迭代次数根据数据中的离群点比例和期望成功概率来确定),最终选择内点数量最多的模型作为最佳模型。
二、代码实现
2.1关键函数
def registration_ransac_based_on_feature_matching(source, target,
source_feature, target_feature,
max_correspondence_distance,
estimation_method=None, *args, **kwargs):
- source:源点云
- target:目标点云
- source_feature:源点云的特征描述,目前版本的open3d主要是FPFH特征描述
- target_feature:目标点云的特征描述,目前版本的open3d主要是FPFH特征描述
- max_correspondence_distance:对应点之间的最大距离
- estimation_method:默认采用的是点到点的方法。有如下三种方式:(TransformationEstimationPointToPoint, TransformationEstimationPointToPlane, TransformationEstimationForColoredICP)
- ransac_n:随机选取匹配点对的个数,也即RANSAC算法随机选取点的个数。默认值是4。
- checkers:使用快速修剪算法来提早拒绝错误匹配。,有如下3种修剪算法:(CorrespondenceCheckerBasedOnEdgeLength, CorrespondenceCheckerBasedOnDistance, CorrespondenceCheckerBasedOnNormal)
- criteria:定义RANSAC迭代的最大次数和验证的最大次数。这两个值越大,结果越准确,但要花费更多的时间。默认值是:max_iteration=100000, and max_validation=100。
2.2完整代码
import time
import open3d as o3d
import copy
# -------------传入点云数据,计算FPFH------------
def FPFH_Compute(pcd):
radius_normal = 0.01 # kdtree参数,用于估计法线的半径,
print(":: Estimate normal with search radius %.3f." % radius_normal)
pcd.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_normal, max_nn=30))
# 估计法线的1个参数,使用混合型的kdtree,半径内取最多30个邻居
radius_feature = 0.02 # kdtree参数,用于估计FPFH特征的半径
print(":: Compute FPFH feature with search radius %.3f." % radius_feature)
pcd_fpfh = o3d.pipelines.registration.compute_fpfh_feature(pcd,
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_feature, max_nn=100)) # 计算FPFH特征,搜索方法kdtree
return pcd_fpfh # 返回FPFH特征
# ----------------RANSAC配准--------------------
def execute_global_registration(source, target, source_fpfh,
target_fpfh): # 传入两个点云和点云的特征
distance_threshold = 10 # 设定距离阈值
print("we use a liberal distance threshold %.3f." % distance_threshold)
# 2个点云,两个点云的特征,距离阈值,一个函数,4,
# 一个list[0.9的两个对应点的线段长度阈值,两个点的距离阈值],
# 一个函数设定最大迭代次数和最大验证次数
result = o3d.pipelines.registration.registration_ransac_based_on_feature_matching(
source, target, source_fpfh, target_fpfh, True, distance_threshold,
o3d.pipelines.registration.TransformationEstimationPointToPoint(False),
4, [
o3d.pipelines.registration.CorrespondenceCheckerBasedOnEdgeLength(
0.9),
o3d.pipelines.registration.CorrespondenceCheckerBasedOnDistance(
distance_threshold)
], o3d.pipelines.registration.RANSACConvergenceCriteria(4000000, 500))
return result
# ---------------可视化配准结果----------------
def draw_registration_result(source, target, transformation):
source_temp = copy.deepcopy(source) # 由于函数transformand paint_uniform_color会更改点云,
target_temp = copy.deepcopy(target) # 因此调用copy.deepcoy进行复制并保护原始点云。
source_temp.paint_uniform_color([1, 0, 0]) # 点云着色
target_temp.paint_uniform_color([0, 1, 0])
source_temp.transform(transformation)
# o3d.io.write_point_cloud("trans_of_source.pcd", source_temp)#保存点云
o3d.visualization.draw_geometries([source_temp, target_temp],width=1200, height=900)
# ----------------读取点云数据--------------
source = o3d.io.read_point_cloud("..//..//standford_cloud_data//hand_trans.pcd")
target = o3d.io.read_point_cloud("..//..//standford_cloud_data//hand.pcd")
source=source.uniform_down_sample(every_k_points=10)
target=target.uniform_down_sample(every_k_points=10)
# -----------------计算的FPFH---------------
source_fpfh=FPFH_Compute(source)
target_fpfh=FPFH_Compute(target)
# ---------------调用RANSAC执行配准------------
start = time.time()
result_ransac = execute_global_registration(source, target,
source_fpfh, target_fpfh)
print("Global registration took %.3f sec.\n" % (time.time() - start))
print(result_ransac) # 输出RANSAC配准信息
Tr = result_ransac.transformation
draw_registration_result(source, target, Tr) 2.3代码解析
2.3.1计算FPFH
这段代码的主要作用是为输入的点云(pcd对象)进行法线估计和FPFH特征计算。法线估计通过指定半径和最大最近邻点数来计算每个点的法向量,而FPFH特征计算则基于这些法向量和局部邻域信息,生成描述点云局部几何特征的特征向量。这些特征在点云处理中常用于配准、识别和分割等任务,有助于捕捉点云的几何结构和局部特征信息
# -------------传入点云数据,计算FPFH------------
def FPFH_Compute(pcd):
radius_normal = 0.01 # kdtree参数,用于估计法线的半径,
print(":: Estimate normal with search radius %.3f." % radius_normal)
pcd.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_normal, max_nn=30))
# 估计法线的1个参数,使用混合型的kdtree,半径内取最多30个邻居
radius_feature = 0.02 # kdtree参数,用于估计FPFH特征的半径
print(":: Compute FPFH feature with search radius %.3f." % radius_feature)
pcd_fpfh = o3d.pipelines.registration.compute_fpfh_feature(pcd,
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_feature, max_nn=100)) # 计算FPFH特征,搜索方法kdtree
return pcd_fpfh # 返回FPFH特征1. 法线估计
radius_normal = 0.01
pcd.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_normal, max_nn=30))
作用:
- 法线估计是指在点云中为每个点计算法向量,法向量在计算机视觉和几何处理中很重要,用于描述点云表面的方向和曲率。
- KD树是一种数据结构,用于快速查询最近邻的点。KDTreeSearchParamHybrid参数指定了法线估计算法中的搜索半径和最大最近邻点数。
2. 计算FPFH特征
radius_feature = 0.02
pcd_fpfh = o3d.pipelines.registration.compute_fpfh_feature(
pcd, o3d.geometry.KDTreeSearchParamHybrid(radius=radius_feature, max_nn=100))
作用:
- FPFH特征(Fast Point Feature Histograms)是一种用于描述点云局部几何结构的特征描述符。它对点云中每个点的邻域进行建模,捕捉了点云的表面形状和曲率信息。
- compute_fpfh_feature函数计算点云的FPFH特征,需要指定点云对象和用于搜索的KD树参数(搜索半径和最大最近邻点数)。
2.3.2 全局配准
这段代码实现了全局点云配准的过程,使用了RANSAC(Random Sample Consensus)算法基于特征匹配来寻找最优的刚体变换(旋转和平移),使得源点云与目标点云尽可能对齐。
# ----------------RANSAC配准--------------------
def execute_global_registration(source, target, source_fpfh,
target_fpfh): # 传入两个点云和点云的特征
distance_threshold = 10 # 设定距离阈值
print("we use a liberal distance threshold %.3f." % distance_threshold)
# 2个点云,两个点云的特征,距离阈值,一个函数,4,
# 一个list[0.9的两个对应点的线段长度阈值,两个点的距离阈值],
# 一个函数设定最大迭代次数和最大验证次数
result = o3d.pipelines.registration.registration_ransac_based_on_feature_matching(
source, target, source_fpfh, target_fpfh, True, distance_threshold,
o3d.pipelines.registration.TransformationEstimationPointToPoint(False),
4, [
o3d.pipelines.registration.CorrespondenceCheckerBasedOnEdgeLength(
0.9),
o3d.pipelines.registration.CorrespondenceCheckerBasedOnDistance(
distance_threshold)
], o3d.pipelines.registration.RANSACConvergenceCriteria(4000000, 500))
return result1.函数:execute_global_registration
def execute_global_registration(source, target, source_fpfh, target_fpfh):
参数:
- source:源点云对象。
- target:目标点云对象。
- source_fpfh:源点云的FPFH特征。
- target_fpfh:目标点云的FPFH特征。
2.距离阈值
distance_threshold = 10
print("we use a liberal distance threshold %.3f." % distance_threshold)
距离阈值:
- distance_threshold:设定的距离阈值,用于判断匹配点对的有效性。
3.registration_ransac_based_on_feature_matching函数
result = o3d.pipelines.registration.registration_ransac_based_on_feature_matching(
source, target, source_fpfh, target_fpfh, True, distance_threshold,
o3d.pipelines.registration.TransformationEstimationPointToPoint(False),
4, [
o3d.pipelines.registration.CorrespondenceCheckerBasedOnEdgeLength(0.9),
o3d.pipelines.registration.CorrespondenceCheckerBasedOnDistance(
distance_threshold)
], o3d.pipelines.registration.RANSACConvergenceCriteria(4000000, 500))
参数解释:
- source 和 target:待配准的源点云和目标点云。
- source_fpfh 和 target_fpfh:源点云和目标点云的FPFH特征。
- True:表示进行全局配准。
- distance_threshold:距离阈值,用于判断匹配点对的有效性。
- TransformationEstimationPointToPoint(False):使用点到点的变换估计方法。
- 4:RANSAC算法的迭代次数。
- [...]:用于检查对应关系的有效性的列表,包括基于边长和距离的检查器。
- RANSACConvergenceCriteria(4000000, 500):设定RANSAC的最大迭代次数和最大验证次数。
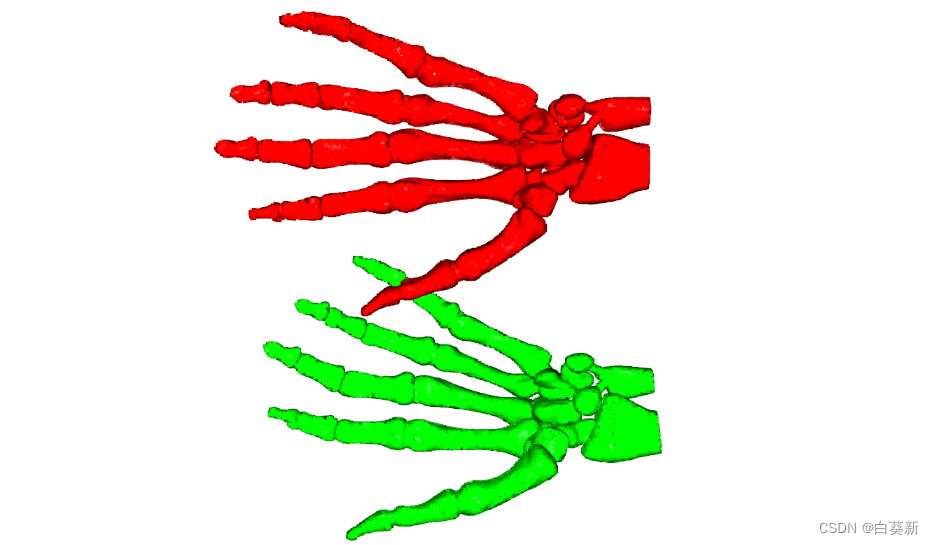
三、实现效果
3.1原始点云
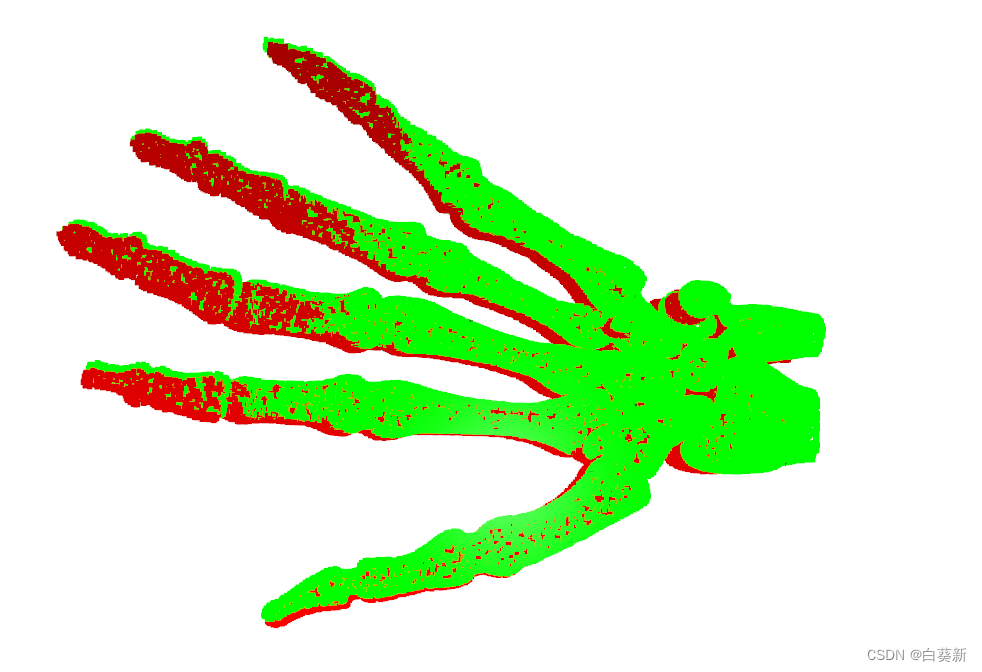
3.2配准后点云


![Java [ 基础 ] 方法引用 ✨](https://img-blog.csdnimg.cn/direct/b626a058e40a4131b4c1a8e8bd171ee2.png)