随着车载以太网技术的快速发展,智能汽车也已经走进了千家万户,OTA无线解决方案也逐渐走进了大众的视野;实际上在车载以太网未出现之前,我们车上大多数使用的升级一般都是adb、U盘等不太方便的刷写方式,并且在车上是一种很神秘的操作(一般仅在4s店和主机厂使用),然后这种方式在保证安全性的同时,也限制了车载软件的发展,无法实现快速的迭代,提供给终端用户更多新奇的功能,因此OTA应运而生。CAN/CANFD/LIN刷写在近几年的车载ECU上也逐渐进行了普及(大部分小型ECU不带有ETH接口),也是由于这个原因,我把常规的CAN、CANFD、LIN、Ethernet刷写放在了一起,更加方便大家的阅读和学习,他们的目的只有一个就是实现远程的车载ECU的软件更新。

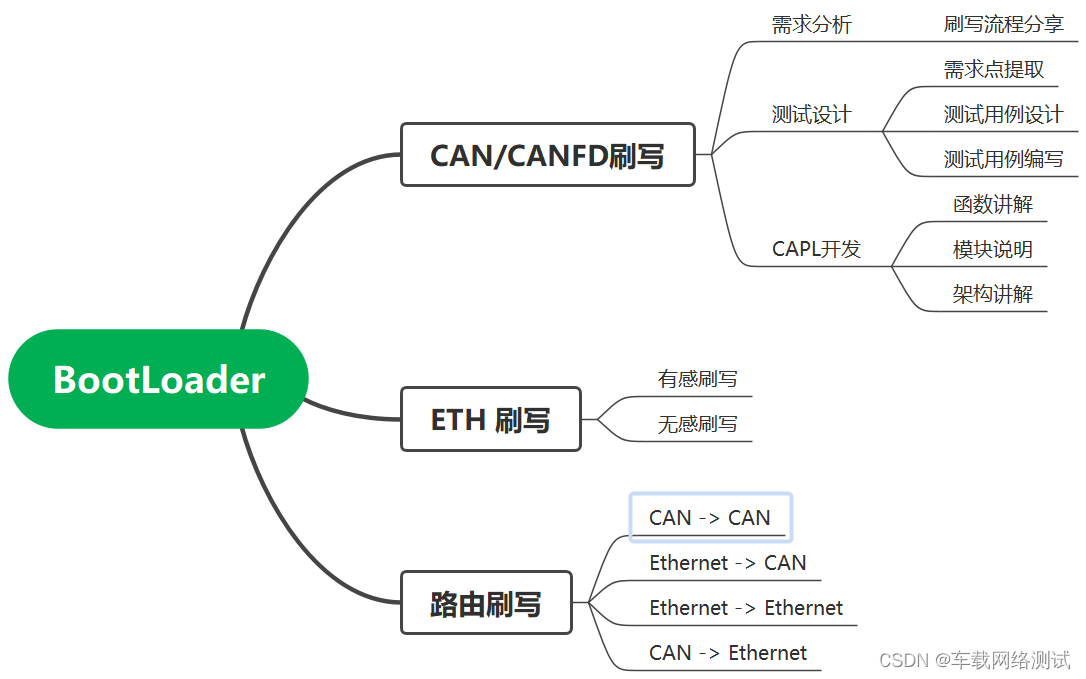
一、CAN/CANFD刷写
这也是我工作生涯中最早接触的车载ECU的刷写方式,并且不管是现在的CANFD、Ethernet相关的有感、无感刷写都是在它的基础上进行衍生,因此这里是相当重要的一部分,特别是对于刷写逻辑的说明。

一般来说,每家主机厂的刷写流程都是一样的,无论是基于CAN还是CANFD,其中的区别也就是底层协议栈的处理可能会有略微不同,不过刷写主要在应用层,对于学习和使用这块的人来说并没有太大的影响,因此就分享一次得了,大家有需求可以私信或者评论联系我。
这块介绍的逻辑也是我们日常工作中的工作顺序,首先是需求分析,搞明白刷写流程到底是怎么样的,已经梳理刷写过程的各类操作到底是什么;这块搞清楚后,接下来就是测试设计, 测试设计也是有一定的方法,如何让一个新手具备一块功能的测试用例设计保证功能的完整性,这个我们就要引入测试用例设计方法、需求点提取方法等手段来保证,这些实现后就是测试用例名称梳理和测试用例编写了。
最后就是CAPL(vTESTstudio)自动化开发,实际上对于这块的开发我们使用Python也是能够完全满足的,但是为何我还是选择CAPL呢?这就涉及到我们的测试平台化,如何最大限度的保证软件功能的完整性,这里我们不做过多的纠结。不过由于CAPL语言的局限性,因此想要开发出大家都能直接看到的测试脚本,需要我们前期进行完整的架构设计,以及嵌入平台化测试的思想,最大限度保证代码的可复用性,因此我们会从函数、模块、架构3个方面全面讲解。
二、Ethernet刷写
如果公司有DoIP刷写的话,那么你可能会经常听到有感刷写和无感刷写的谈话,有感刷写顾名思义就是我们常见的CAN刷写逻辑,也是在终端用户有感知的情况下进行软件的更新;而无感刷写就是在终端用户感知不到的情况,并且不影响车辆的正常使用的情况下进行刷写。因此在这一块,会重新引入无感刷写的流程,这是区别于CAN刷写的一个刷写流程。
三、路由刷写
路由刷写实际上是域控制器时代的产品(仅代表个人观点),由于域控制器继承了车上大部分的功能,而域控制器与小型ECU模块间为了建立一体化联系,并且引入了车载以太网,因此有了路由的概念,路由涉及到了CAN、LIN、Ethernet之间的数据转换以及信息交流;并且也涉及了刷写功能,这里我们也会进行介绍。
BootLoader刷写简要