文章目录
- Yocto集成ROS2 app程序
- 1. 添加一个ros2 package应用程序
- 2. 添加bb文件集成app应用程序
Yocto集成ROS2 app程序
本篇文章为基于raspberrypi 4B单板的yocto实战系列的第十二篇文章:
一、yocto 编译raspberrypi 4B并启动
二、yocto 集成ros2(基于raspberrypi 4B)
三、Yocto创建自定义的layer和image
四、Yocto创建静态IP和VLAN
五、Yocto集成QT5
六、Yocto给组件分组(packagegroups)
七、Yocto使用systemd设置开机自启动程序
八、Yocto 创建自定义的conf文件
九、Yocto创建SDK,给Makefile/CMake使用
十、使用repo管理yocto各个layer
十一、Yocto集成tcpdump等网络工具
在前面的第二章节中我们很早就在image中集成了ros-core的运行环境,但是一只没有编写过测试程序来验证ros通信,然后就下载了官方的ros example程序,在ubuntu中是直接使用colcon编译即可完成编译和通信验证,但是当我尝试添加example到yocto编译时发现居然找不到一个现成可用的模板,所以本章节记录一下如何在yocto中集成ros 应用程序。
1. 添加一个ros2 package应用程序
这里我们拿两个简单的topic通信来验证,一个负责publish消息,一个负责subcribe消息。
涉及到的四个文件如下:
publisher_member_function.cpp
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
1500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, Swiftlane! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
subscriber_member_function.cpp:
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}
CMakeLists.txt:
cmake_minimum_required(VERSION 3.5)
project(ros2-topic-sample)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
install(TARGETS
listener
DESTINATION lib/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# uncomment the line when a copyright and license is not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
package.xml:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>ros2-topic-sample</name>
<version>0.1.0</version>
<description>Examples of minimal publisher/subscriber using rclcpp</description>
<maintainer email="tangtaoqaq@gmail.com">tangtao</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>std_msgs</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
2. 添加bb文件集成app应用程序
然后就需要编写一个bb文件集成上面的ros应用,主要注意的就是在DEPENDS里面指明当前的程序依赖的package包名:
ros2-topic-sample.bb
DESCRIPTION = "Example of minimal publisher/subscriber using rclcpp."
LICENSE = "MIT"
LIC_FILES_CHKSUM = "file://${COMMON_LICENSE_DIR}/MIT;md5=0835ade698e0bcf8506ecda2f7b4f302"
SRC_URI = "file://package.xml \
file://CMakeLists.txt \
file://src/publisher_member_function.cpp \
file://src/subscriber_member_function.cpp \
"
S = "${WORKDIR}/"
DEPENDS = "rclcpp std-msgs ament-cmake-native"
# NOTE: unable to map the following CMake package dependencies: rclcpp ament_lint_auto std_msgs ros_ament_cmake
inherit ros_ament_cmake
然后执行如下指令编译该文件:
bitbake ros2-topic-sample
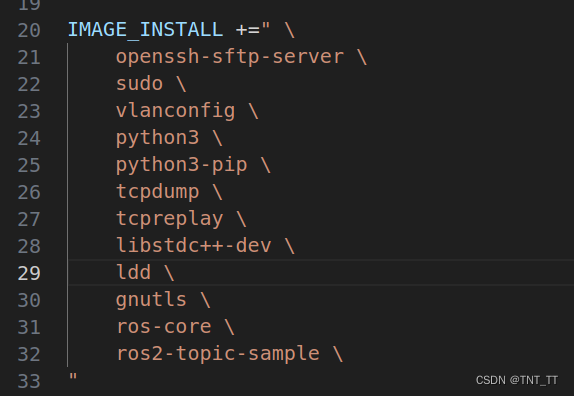
编译成功以后别忘了添加到image里面打包,可以直接加在image的bb文件或者packagegroup的bb文件中均可: