记录项目的详细制作过程,所以笔记很长,图很多、很多图不好CSDN搬运,
我把笔记放网盘或者自己根据资料下载
笔记网盘下载:
链接:https://pan.baidu.com/s/1Mk2EVIha7Fpj4Xductg3Uw?pwd=VCC1
提取码:VCC1
笔记CSDN下载:
第一章-硬件
1.1-元件选型
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-R0hM1EjE-1675083353042)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/20230130191750.png)]
1.2-原理图与PCB
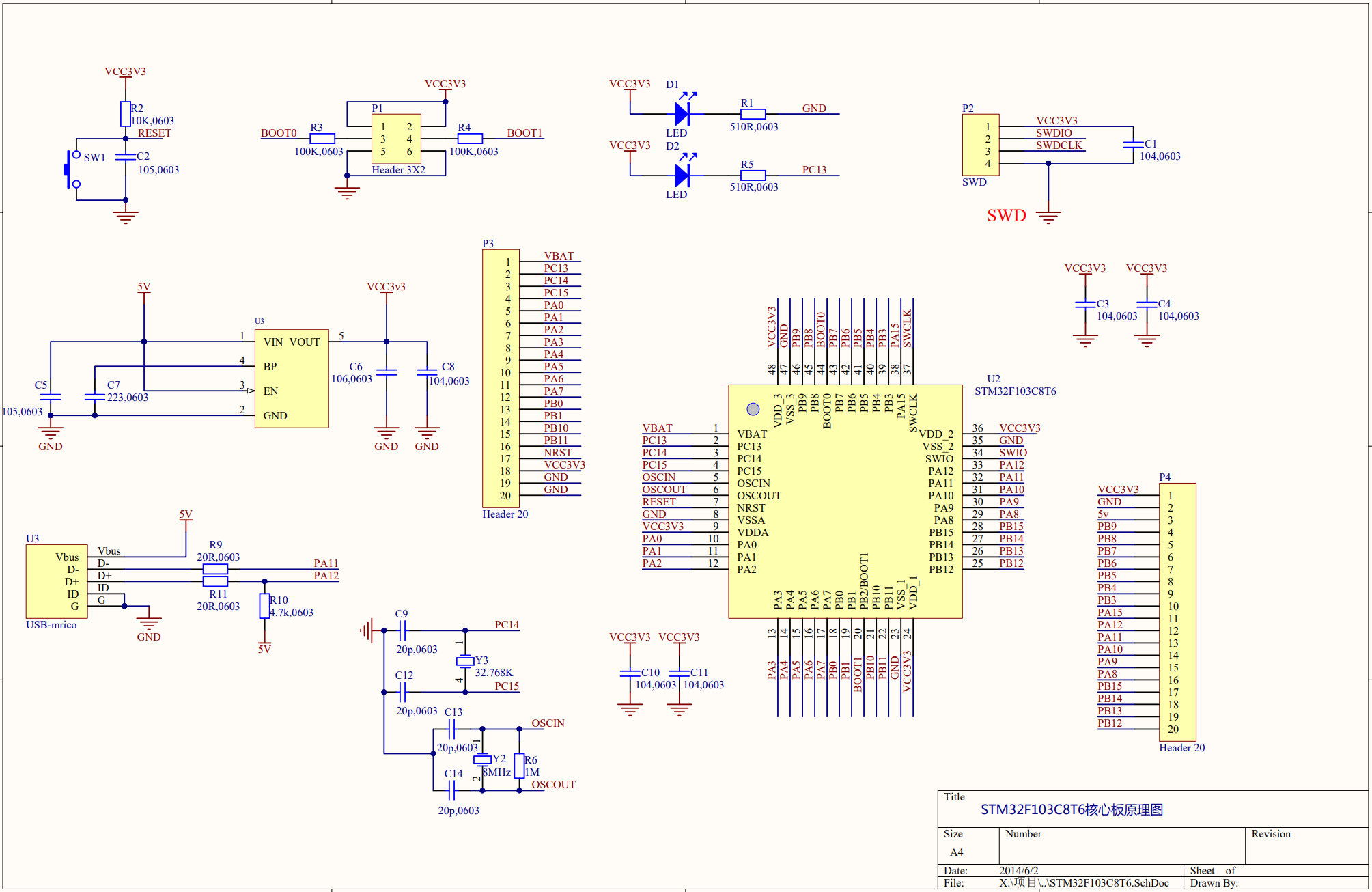
底板原理图
各个模块的供电电压?
模块接口引脚顺序?
如何确定使用单片机那个引脚?
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iaKe5GlI-1675083353043)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221202195108446.png)]
STM32F103C8T6核心板原理图(可能使用不同核心板略有差异)
PCB顶层截图
不同类型线粗细
布局总线方式
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zLeffdEC-1675083353043)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227210621750.png)]
1.3-焊接
PCB正面
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hRLDDbEu-1675083353044)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221231144357465.png)]
PCB背面
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-McMjFy3d-1675083353044)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221231144233002.png)]
然后插上元件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LIQRGX3C-1675083353045)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221231144943159.png)]
1.4-结构与组装
这是组装好的车体照片
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dQimnPjC-1675083353045)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221231150645127.png)]
然后小车安装PCB
注意电机和红外对管不要插错
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-w0zfyyzc-1675083353046)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221231155644678.png)]
1.5-测试
使用万用表 上电前测试一下
第二章-GPIO与中断
2.0-新建工程
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2pvofEC5-1675083353046)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203140147942.png)]
建议选择和我一样的版本
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-toAilRjw-1675083353046)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203135524319.png)]
新建一个工程

选择芯片

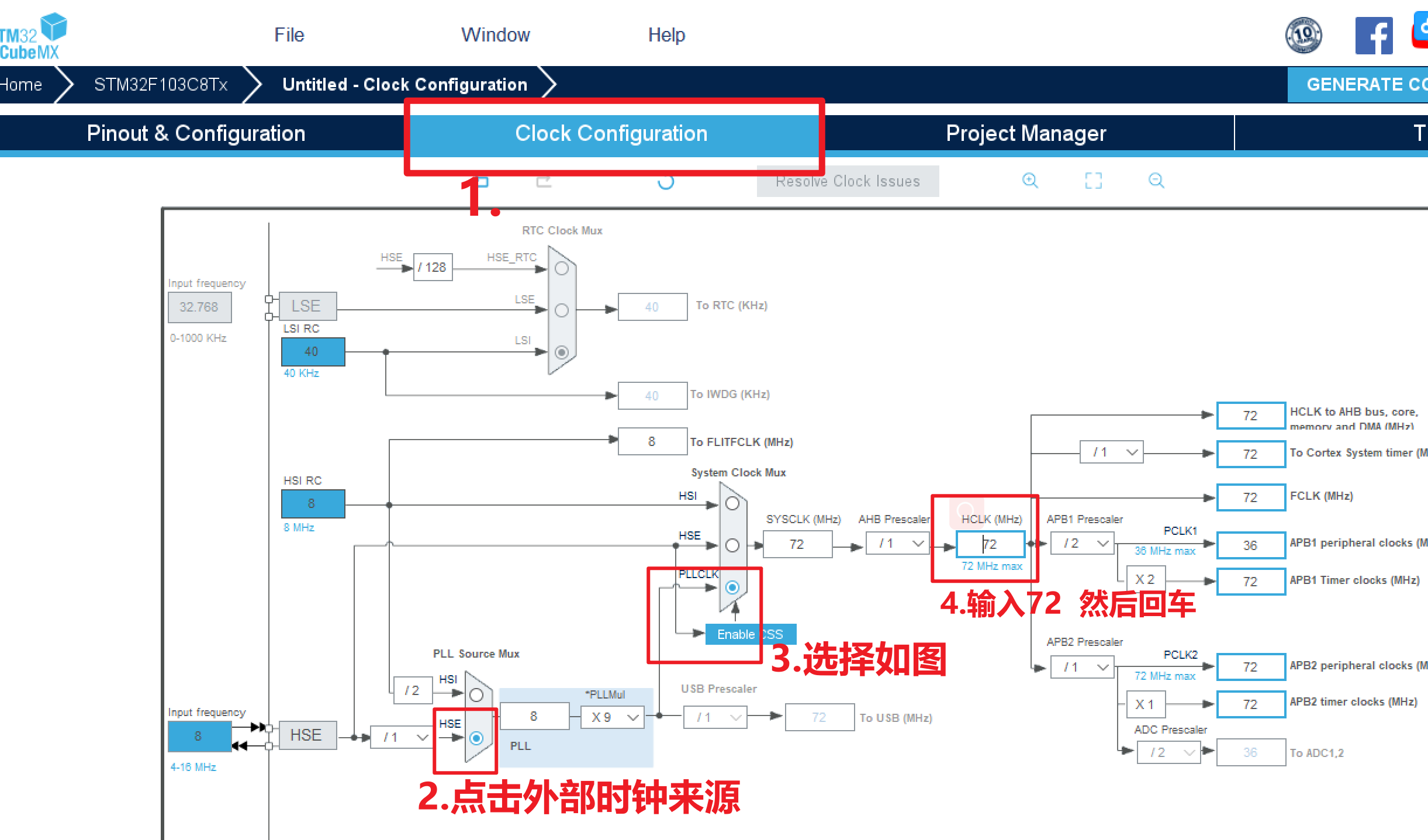
选择时钟源
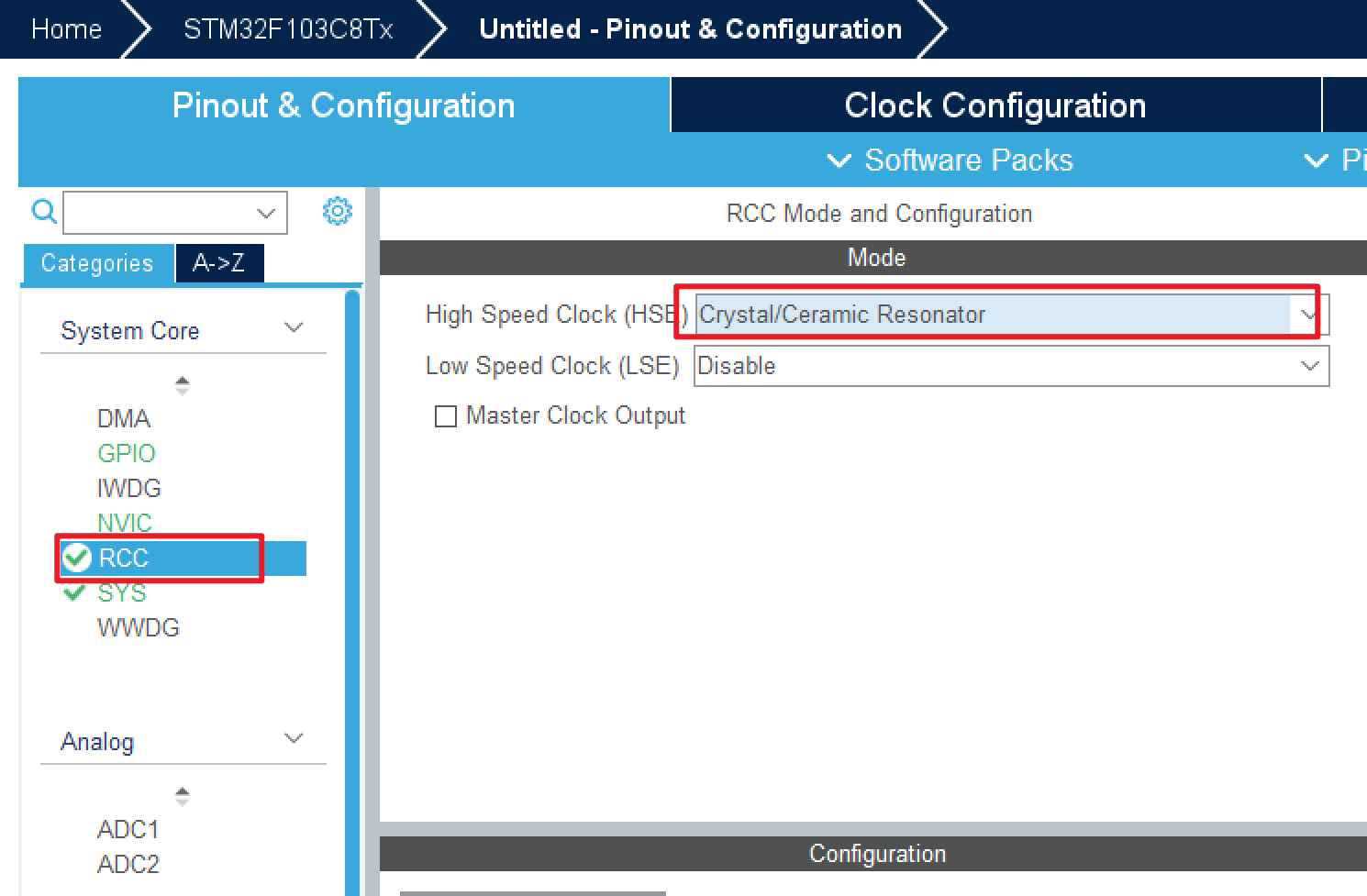
配置时钟树
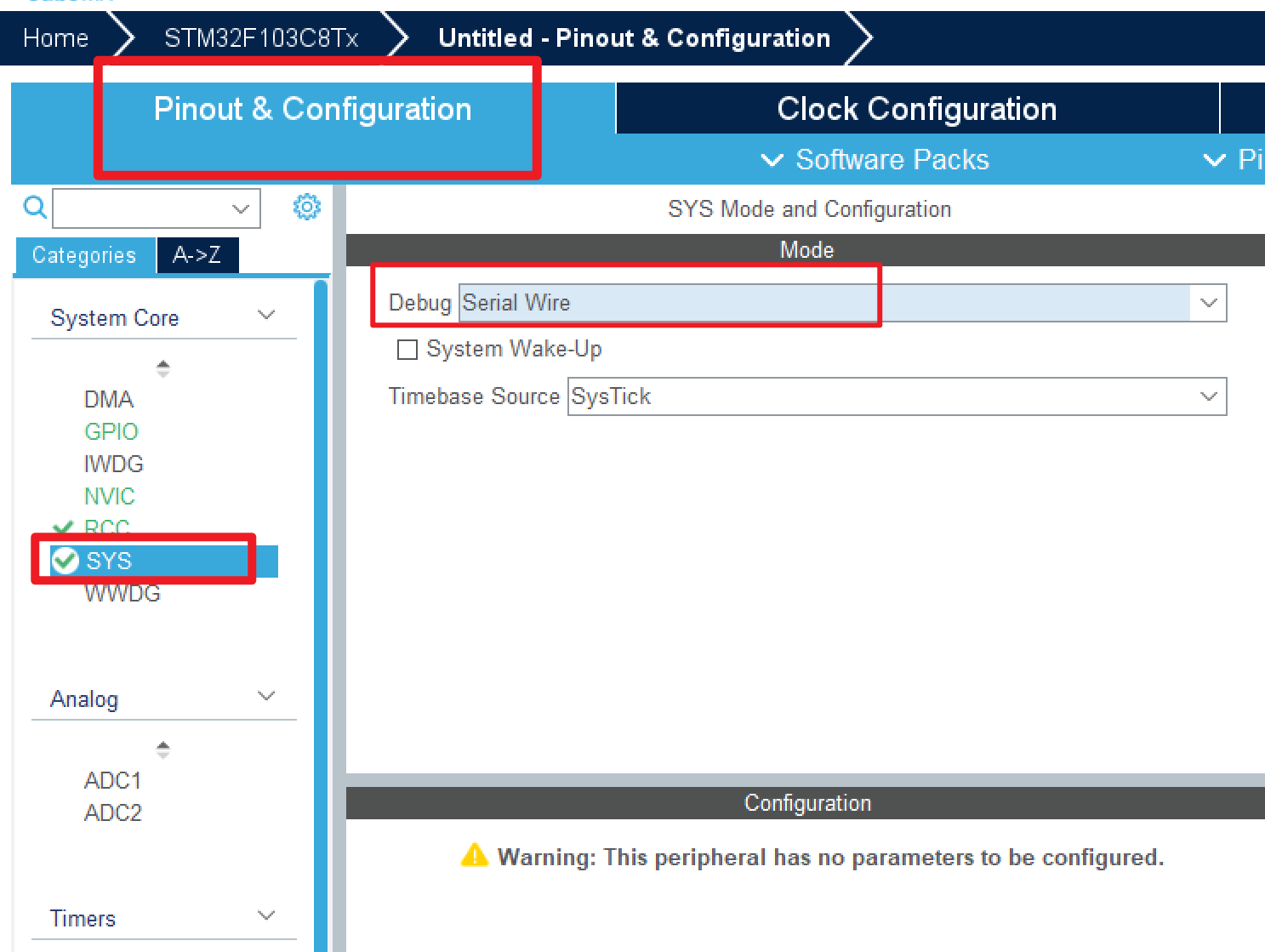
选择调试
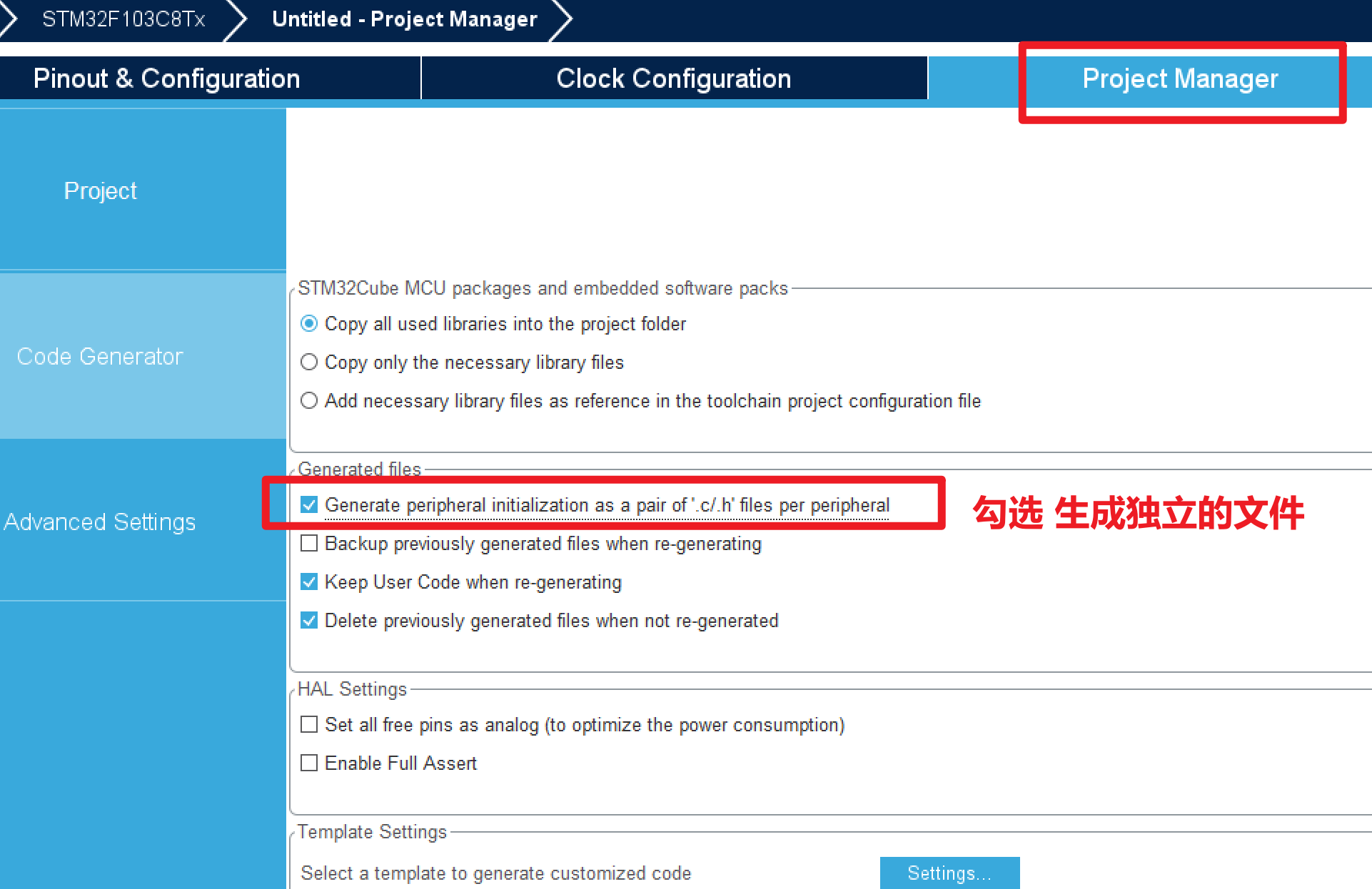
勾选生成独立的文件
设置保存地址
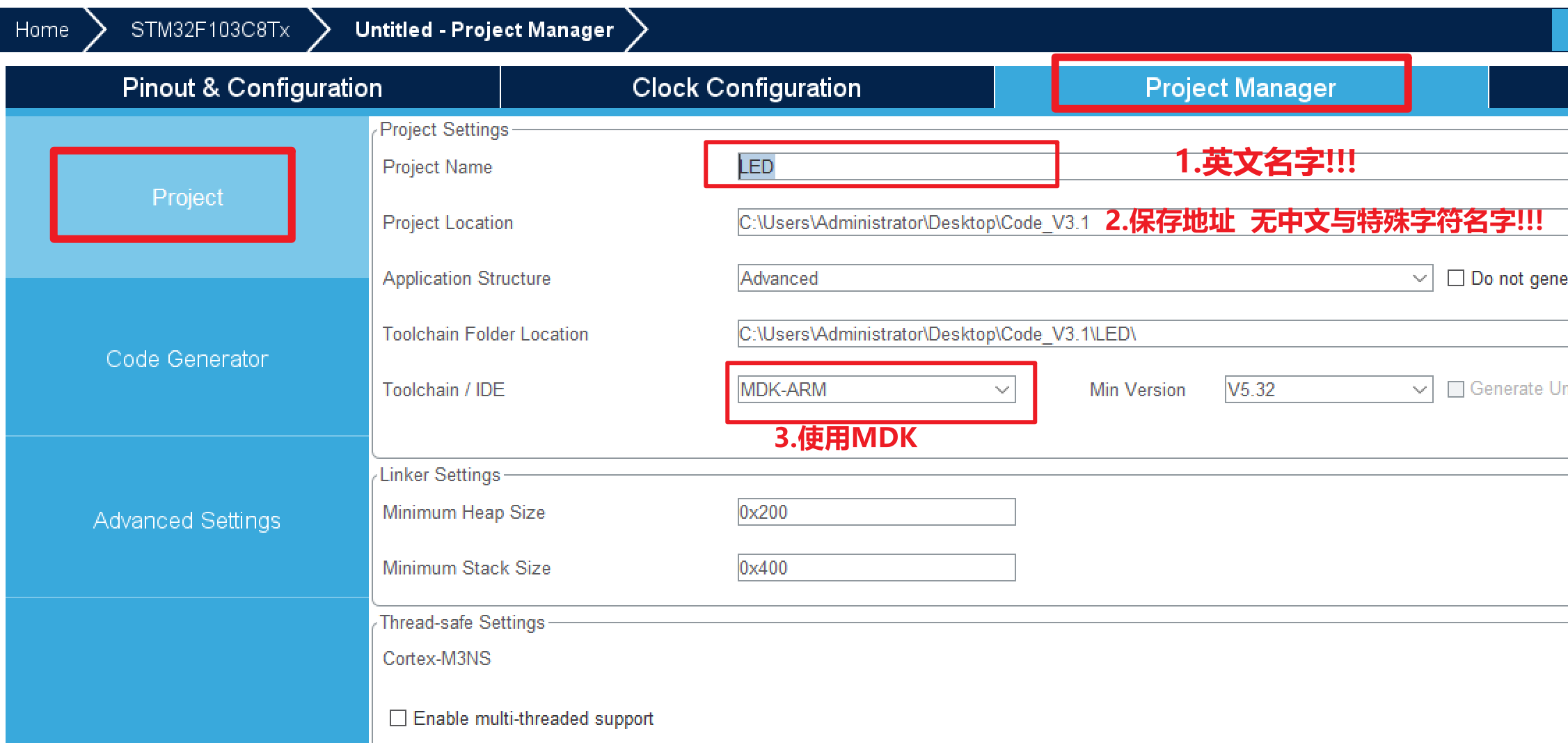
勾选这个不添加没有使用库文件可以减小工程文件大小(也可以不勾选,保持默认设置)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bgTxOyBO-1675083353048)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230112223312210.png)]
MDK打开工程,调低优化等级
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RR9cj3Nb-1675083353048)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203142727527.png)]
以上是每次新建工程要做的
以后我们不在新建工程,使用之间的工程即可
2.1-点灯
这里我们点亮PC13连接的小灯
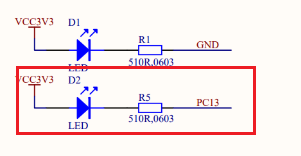
配置PC13
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-URN61Csx-1675083353049)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/202301302021379.png)]
生成代码
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MQ6d68bD-1675083353049)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/202301302021948.png)]
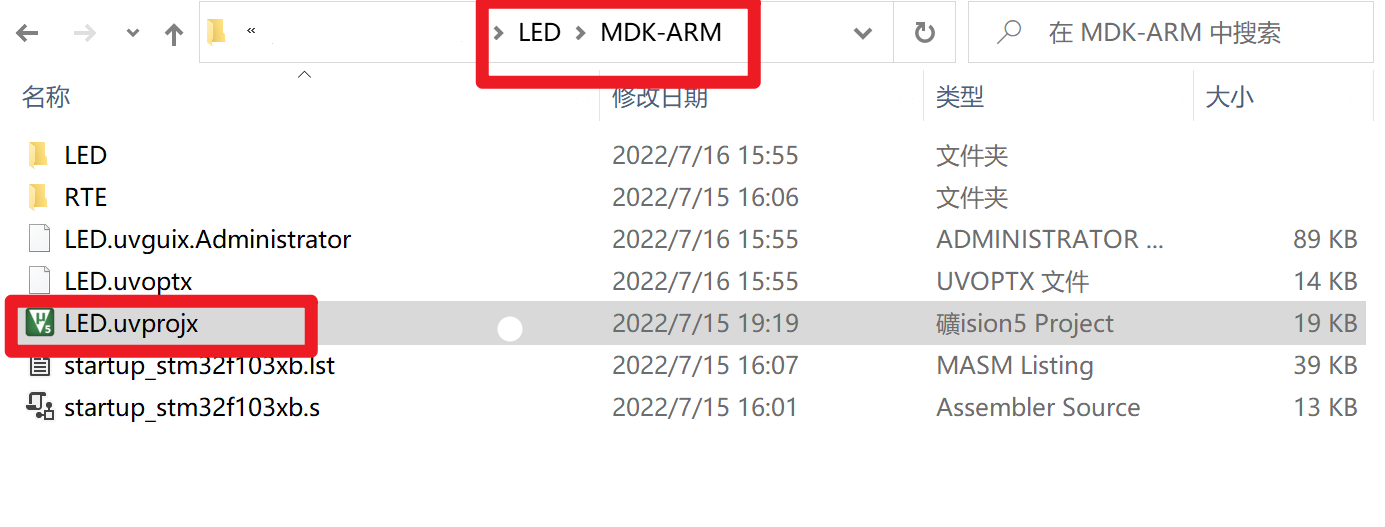
生成代码后,使用MDK打开工程
先编译一下,没有报错、没有问题

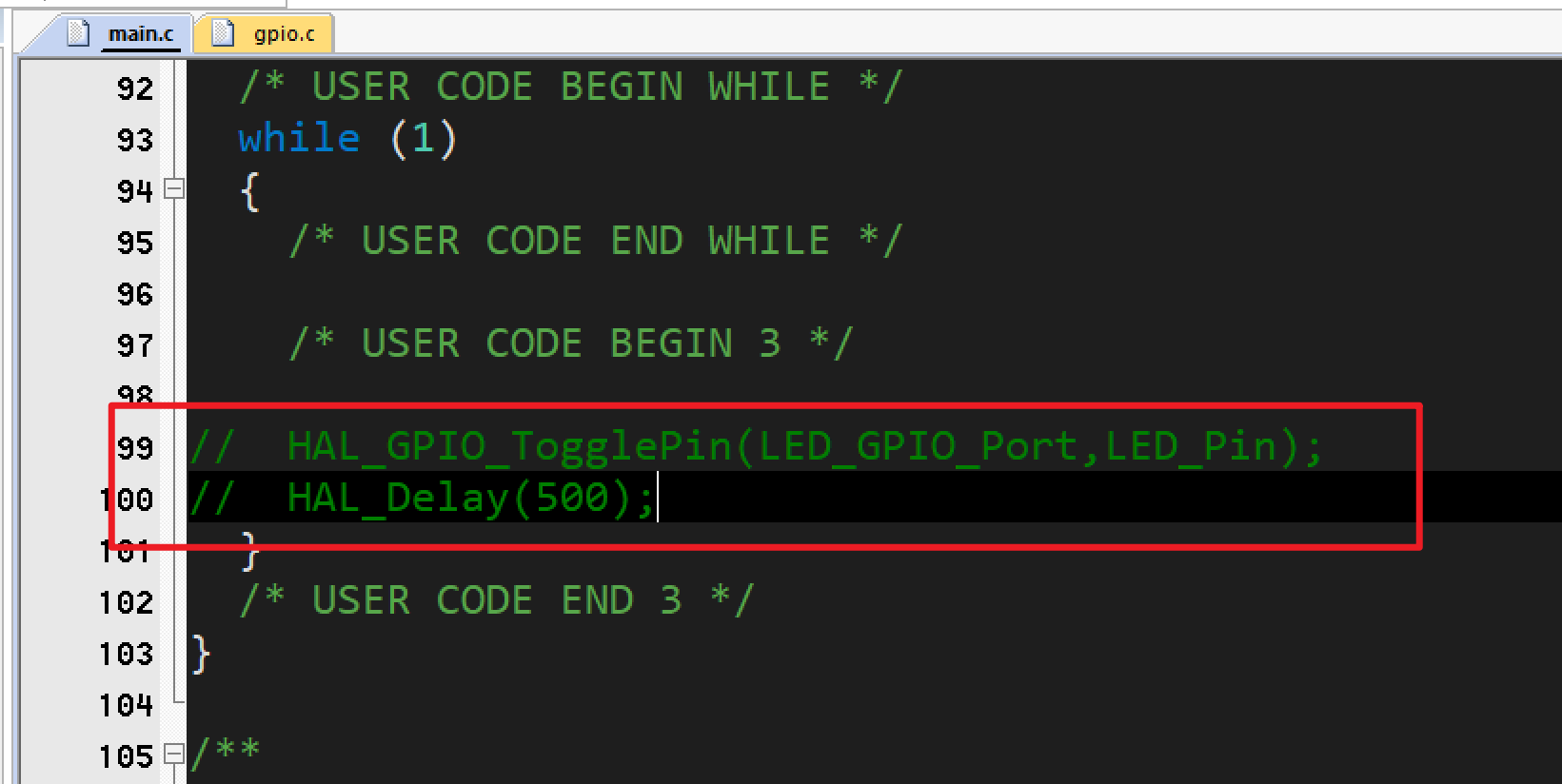
在BEGIN和END添加代码
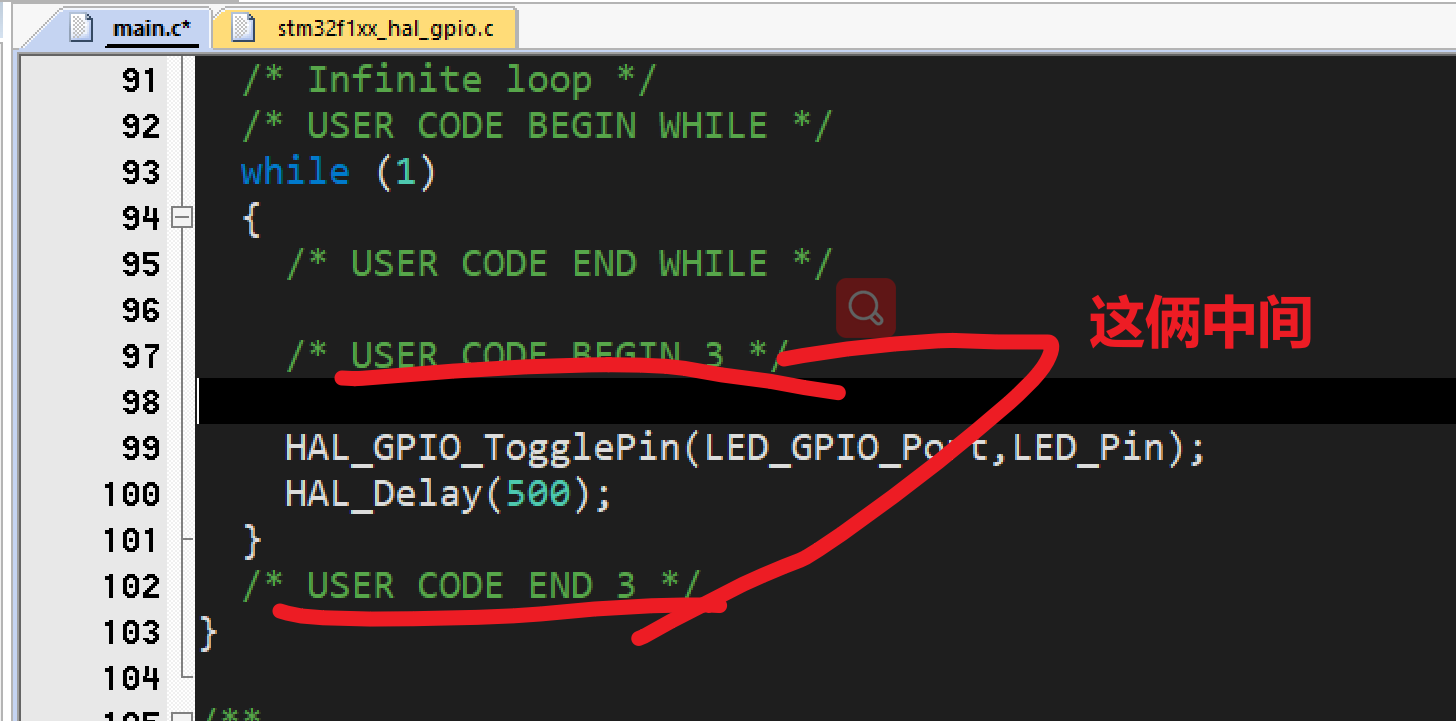
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
HAL_Delay(500);
根据自己的芯片选择
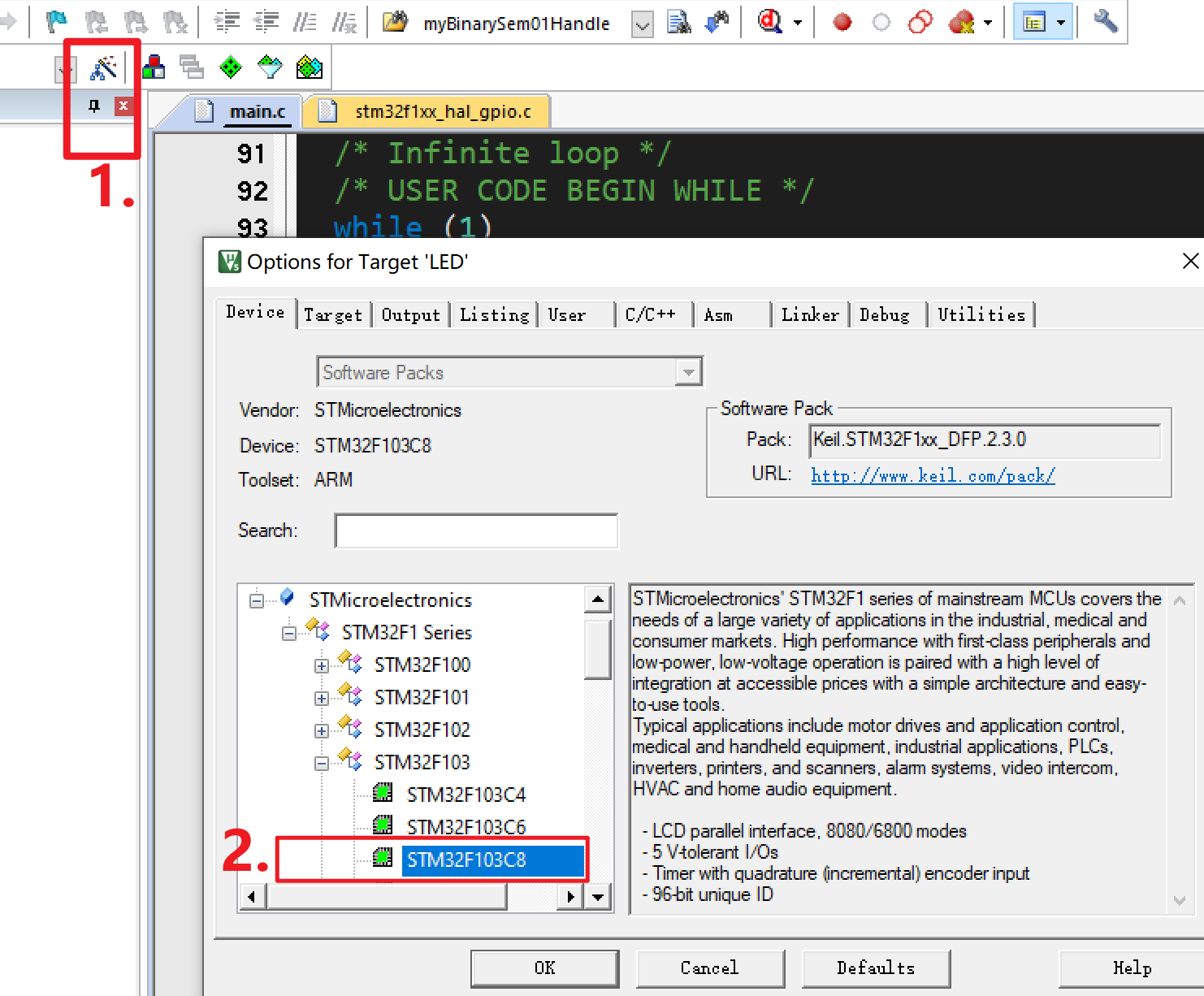
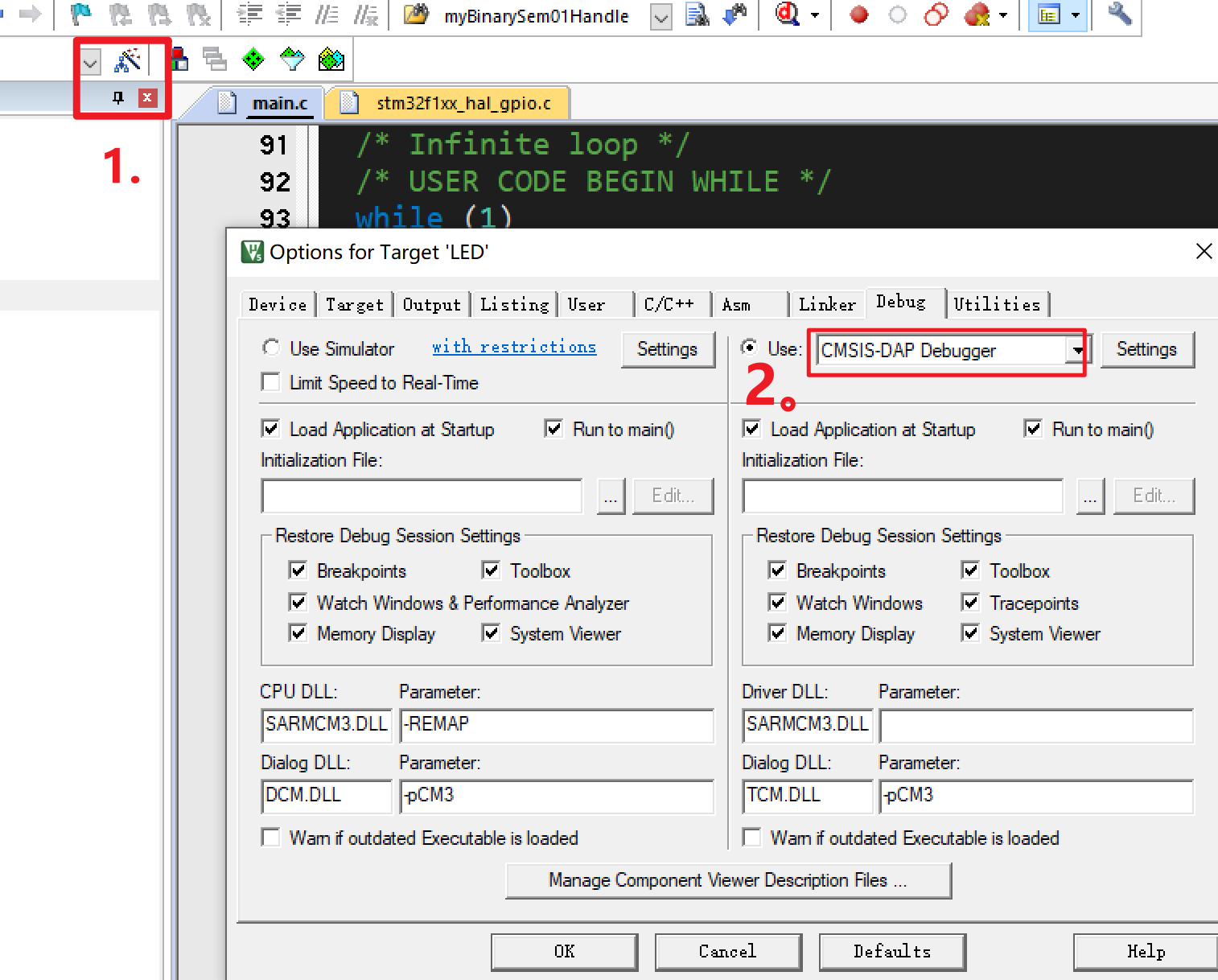
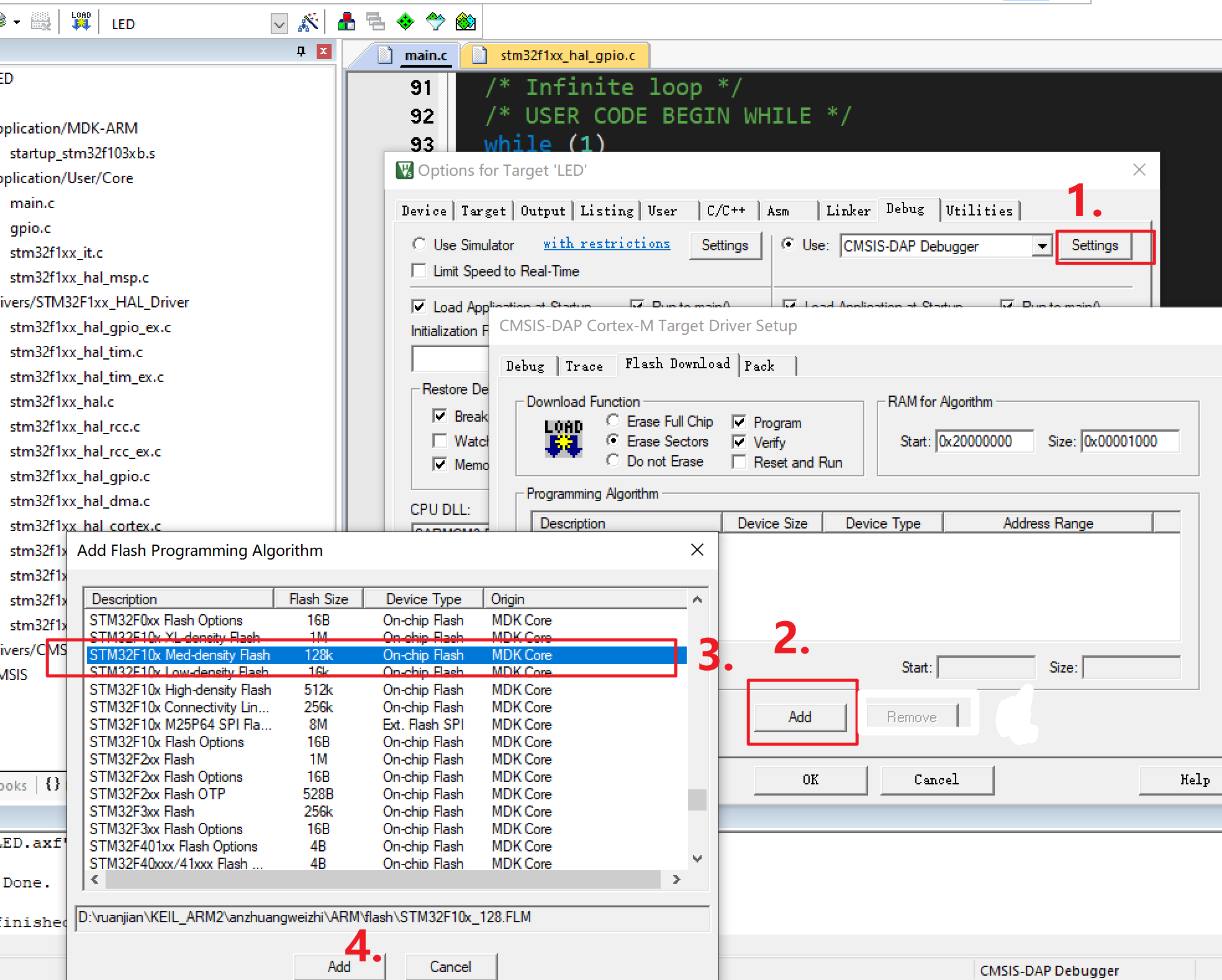
烧录程序(必看 使用其中一个方法)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QBdNfrTe-1675083353051)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227230705273.png)]
方法一:使用DAP LINK
接线图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oG4jclwk-1675083353051)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221229210725895.png)]
DAP 在Win 10 免驱动的
然后根据自己使用的工具在MDK中设置下载工具
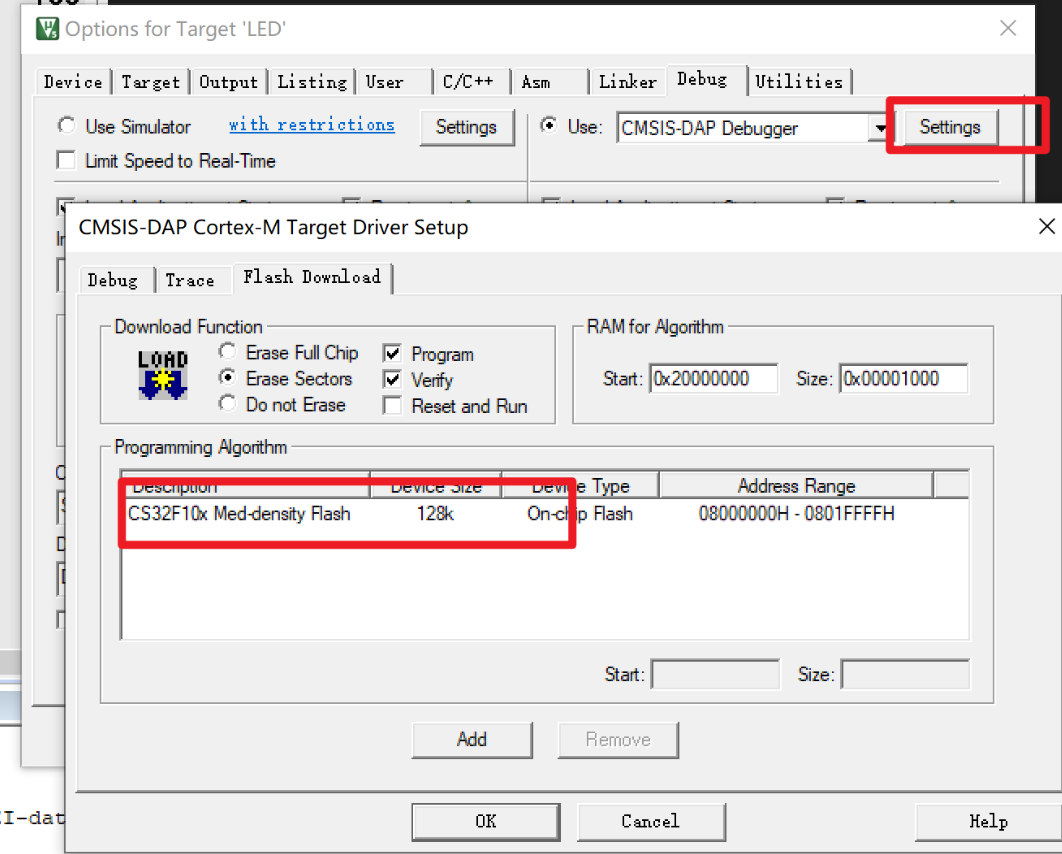
设置下载算法
然后下载程序,复位小灯闪烁
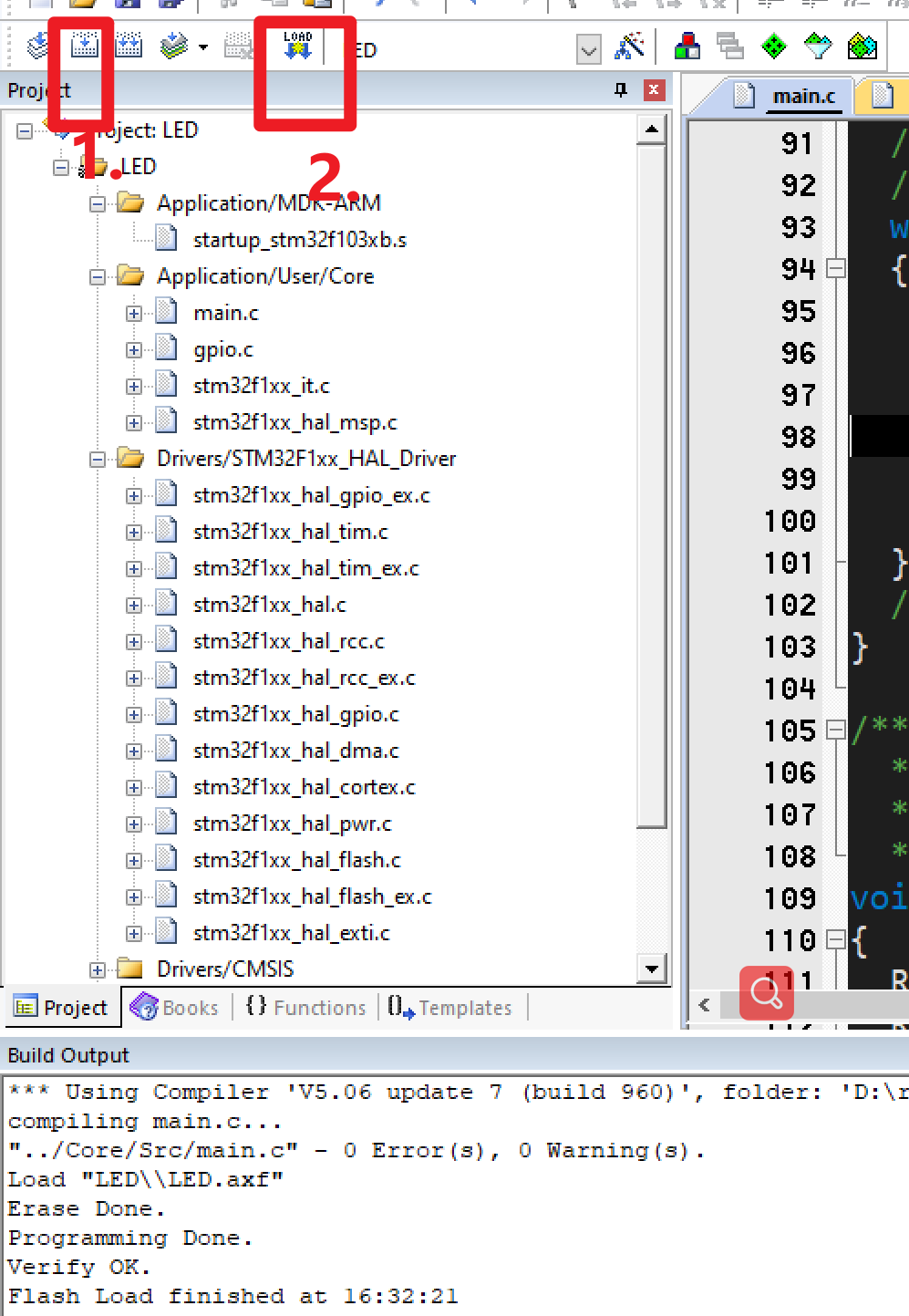
烧录后现象
小灯每0.5秒闪烁一次
方法二:使用stlink
接线图
STlink不要接3.3V
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cLWQnF0v-1675083353052)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221229211513383.png)]
使用Stlink 前先安装驱动
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xWEOxovf-1675083353052)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227225436767.png)]
双击运行
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IJrZV7jN-1675083353053)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227225603998.png)]
选择ST-Link
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jWA1bnyU-1675083353053)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227224923189.png)]
选择算法
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TuKw9qBS-1675083353053)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227225802761.png)]
然后点击编译,烧录
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ry4Y8bkd-1675083353053)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221227230419753.png)]
烧录后现象
小灯每0.5秒闪烁一次
补充可能遇到的失败情况
使用DAP-LINK
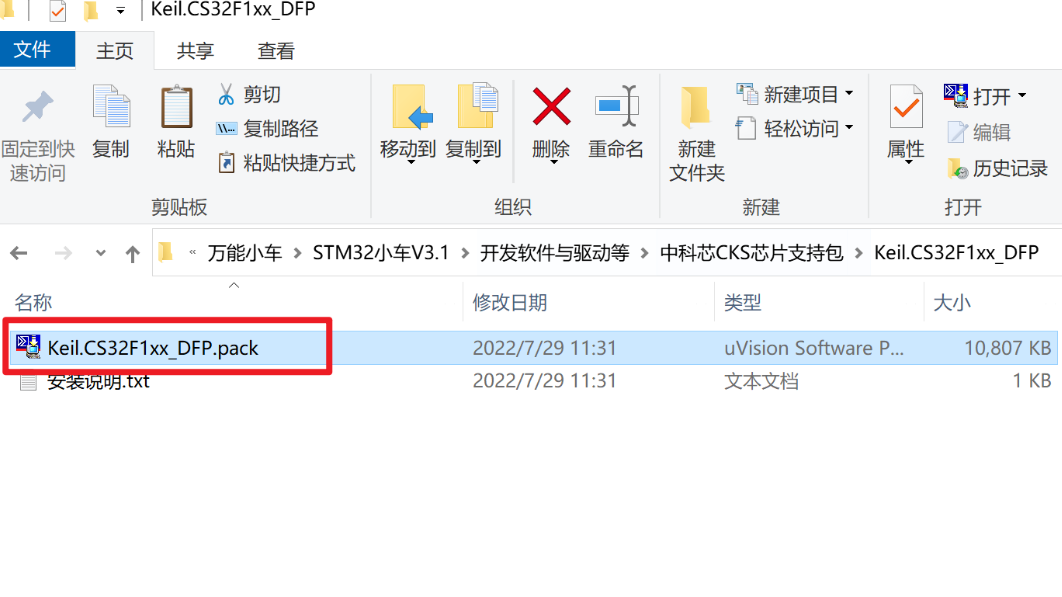
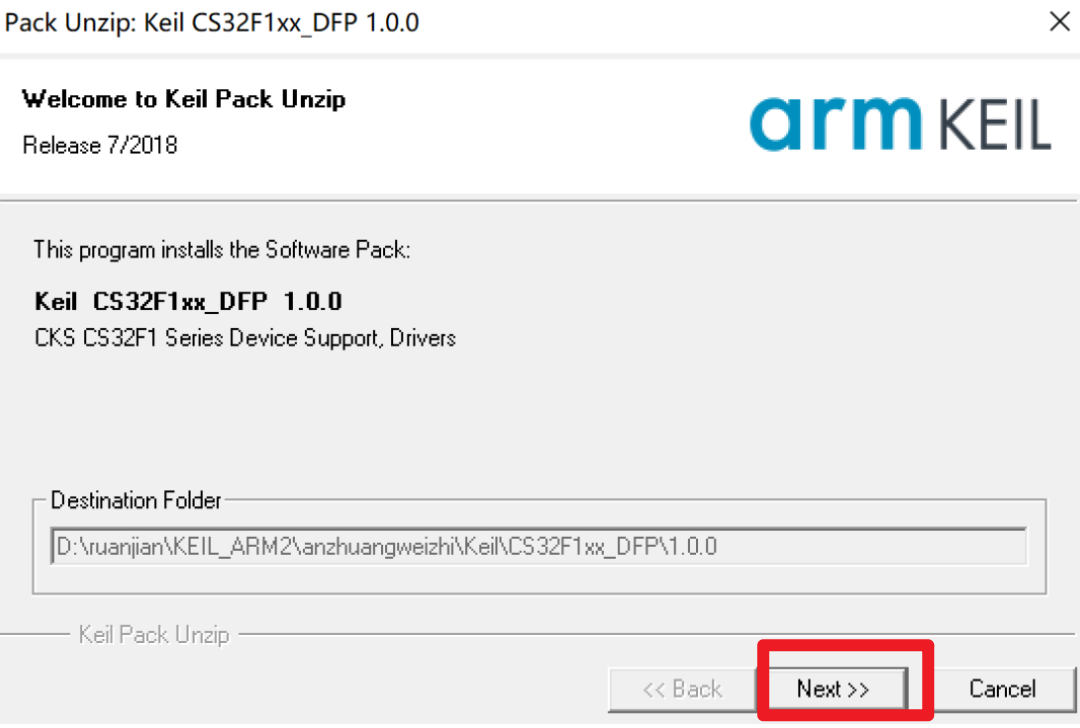
如果我们芯片IDCODE是0x2 开头的那么我们需要替换一下Keil 的器件包
(如果你是0x1 开头的,如果能下载可以不替换)
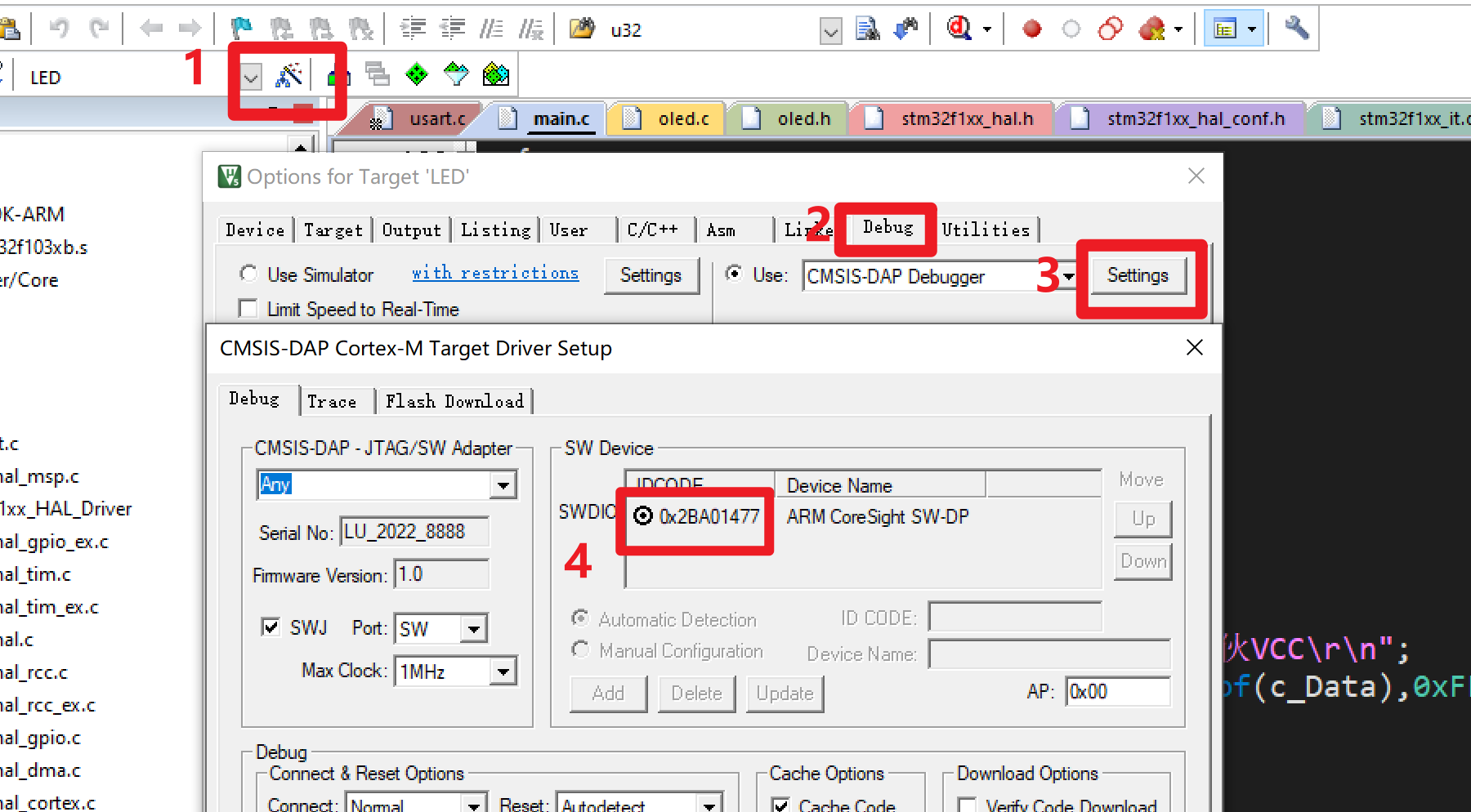
STM32小车相关资料V3.3.0\04使用的软件\中科芯CKS芯片支持包
下面这个算法就会自动切换
使用stlink
2.2-按键
先看原理图
PB4–KEY1 单片机设置下拉输入-、上降沿触发
PA12–KEY2 单片机设置上拉输入、下降沿触发

开始配置
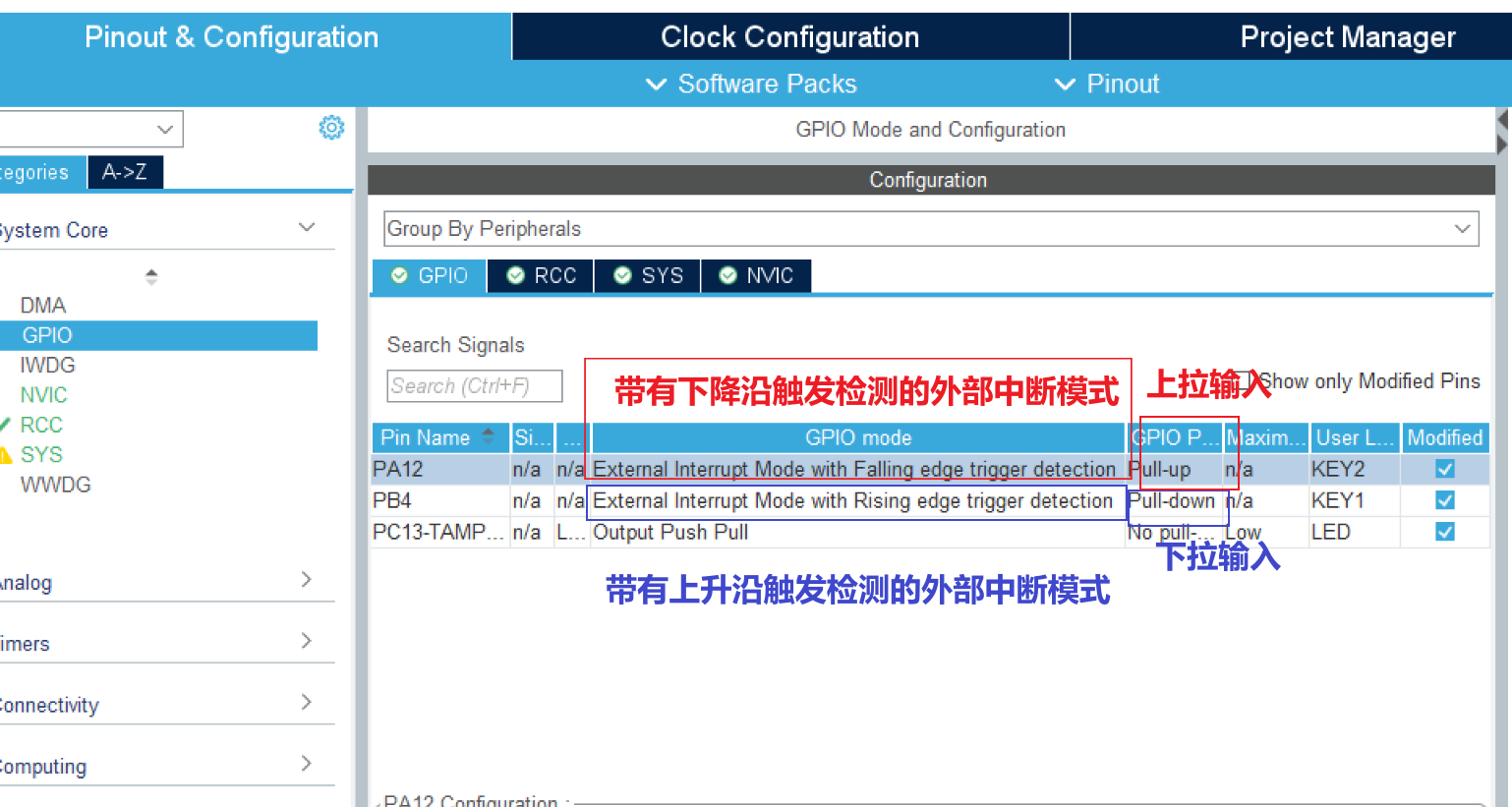
使能外部中断
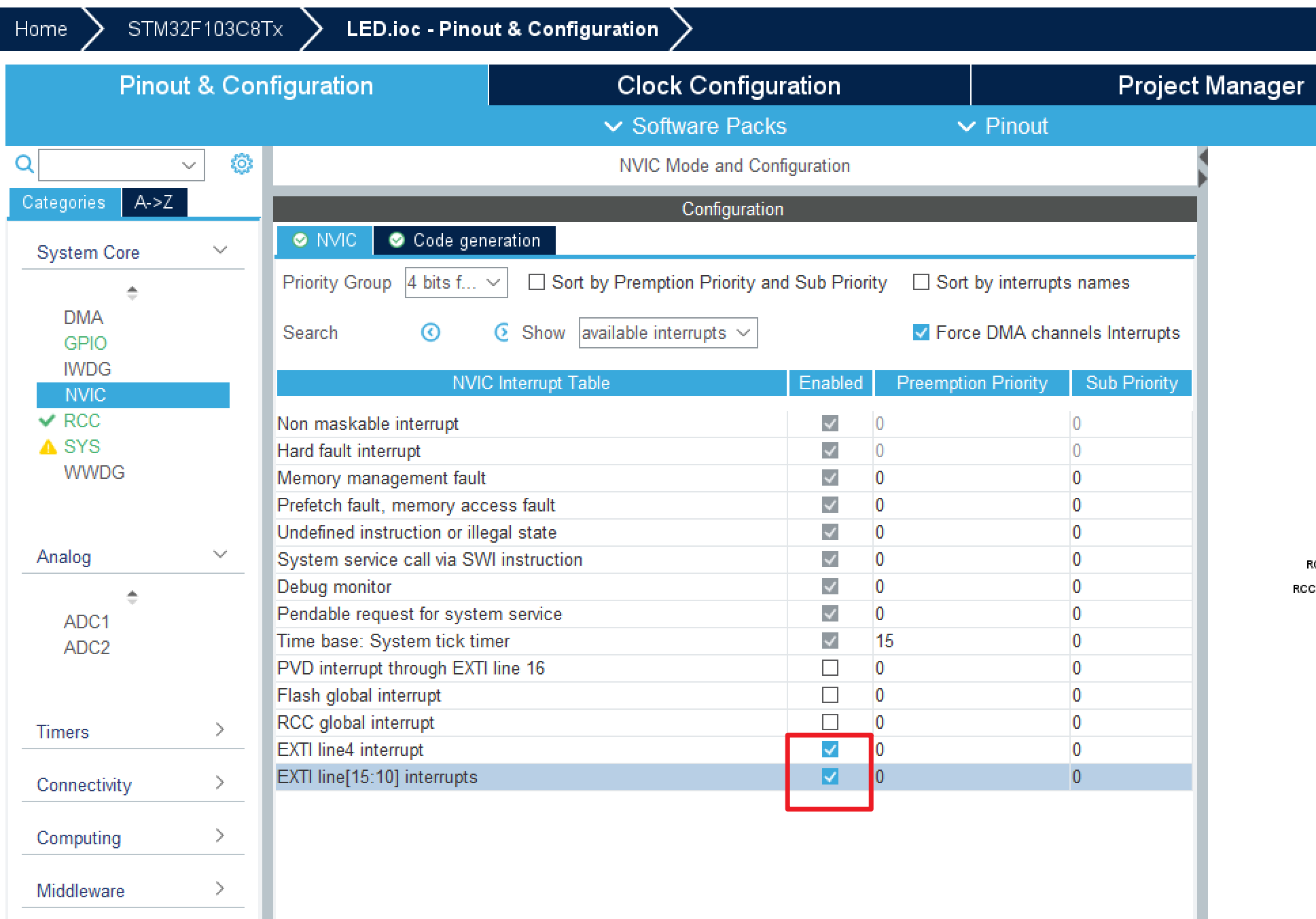
然后生成代码
重新实现中断回调函数、编写按键检测程序
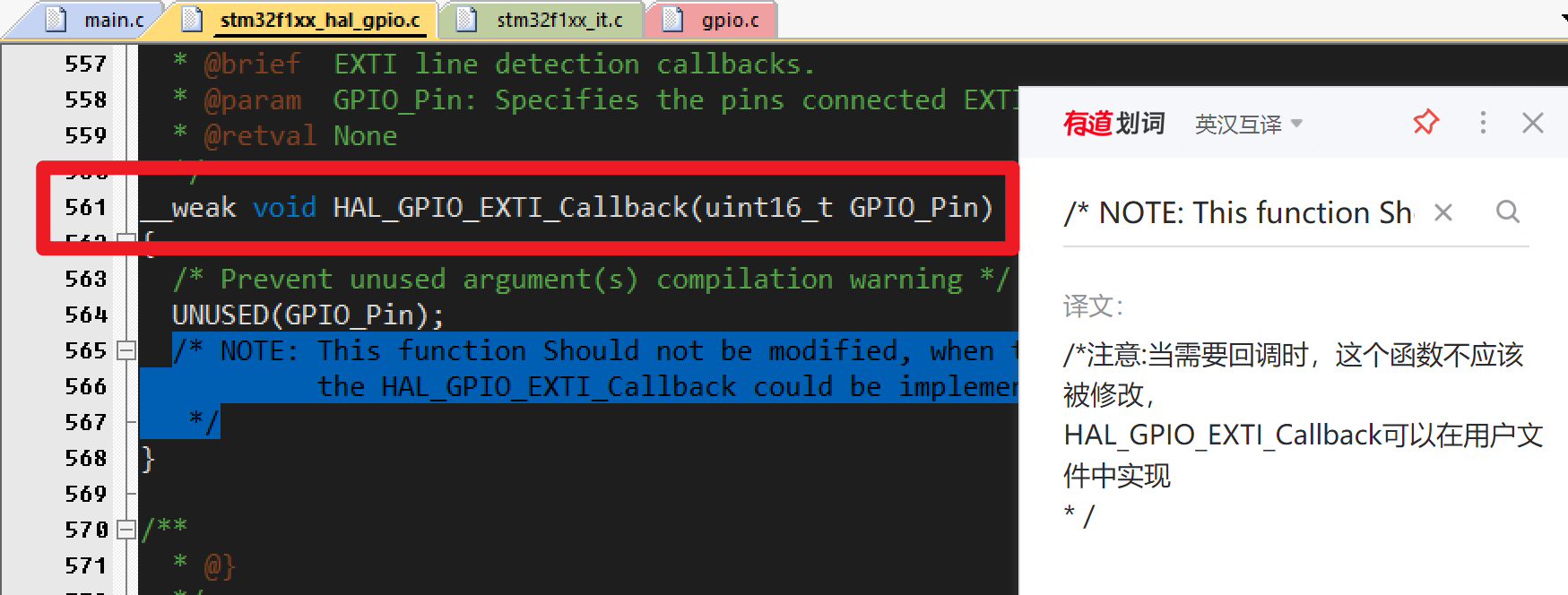
在gpio.c 中我们编写该函数
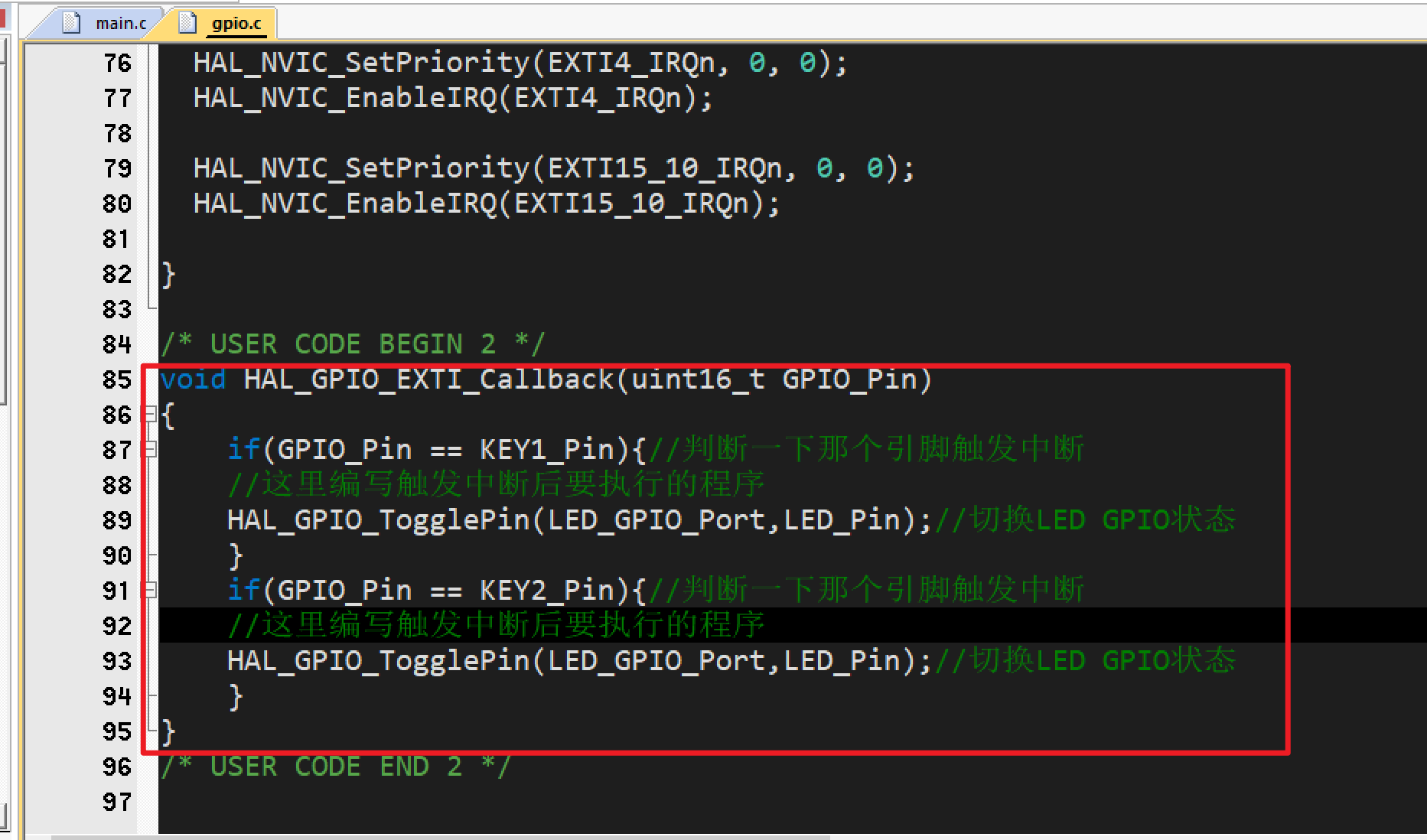
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin){//判断一下那个引脚触发中断
//这里编写触发中断后要执行的程序
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
}
if(GPIO_Pin == KEY2_Pin){//判断一下那个引脚触发中断
//这里编写触发中断后要执行的程序
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
}
}
把main中控制闪烁注释掉
烧录后的现象
按下KEY1 或者KEY2可以切换LED灯开关状态
第三章-OLED使用
3.1-资料准备
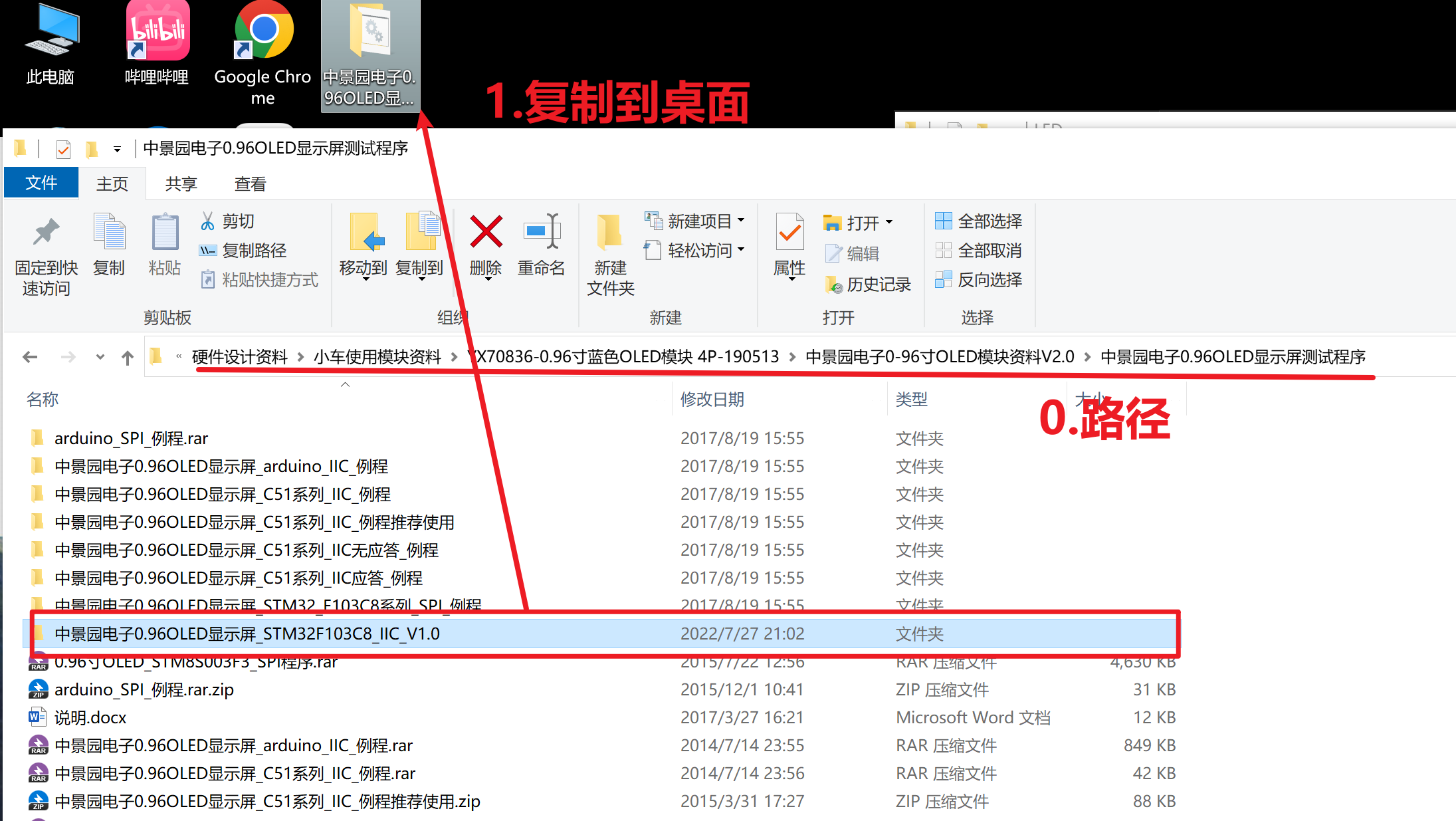
我们先去下载这个OLED模块的资料

这里我们下载:优信电子–0.96寸 OLED显示液晶屏模块 IIC液晶屏 四引脚
淘宝链接:
https://item.taobao.com/item.htm?spm=a230r.1.14.16.504611e6WA3Clv&id=562145367495&ns=1&abbucket=3#detail
OLED资料链接:
0.96寸(4管脚)资料下载链接:
https://pan.baidu.com/s/1J57Izsv-PKmbwVrA2ynDzg 提取码:vktz
找到我们要的历程–中景园电子0.96OLED显示屏_STM32F103C8_IIC_V1.0
3.2-相关知识
这个OLED是IIC协议,很多都是单片机模拟IIC和模块通信的,这个也是模拟IIC控制OLED的
我们先看一下这个历程
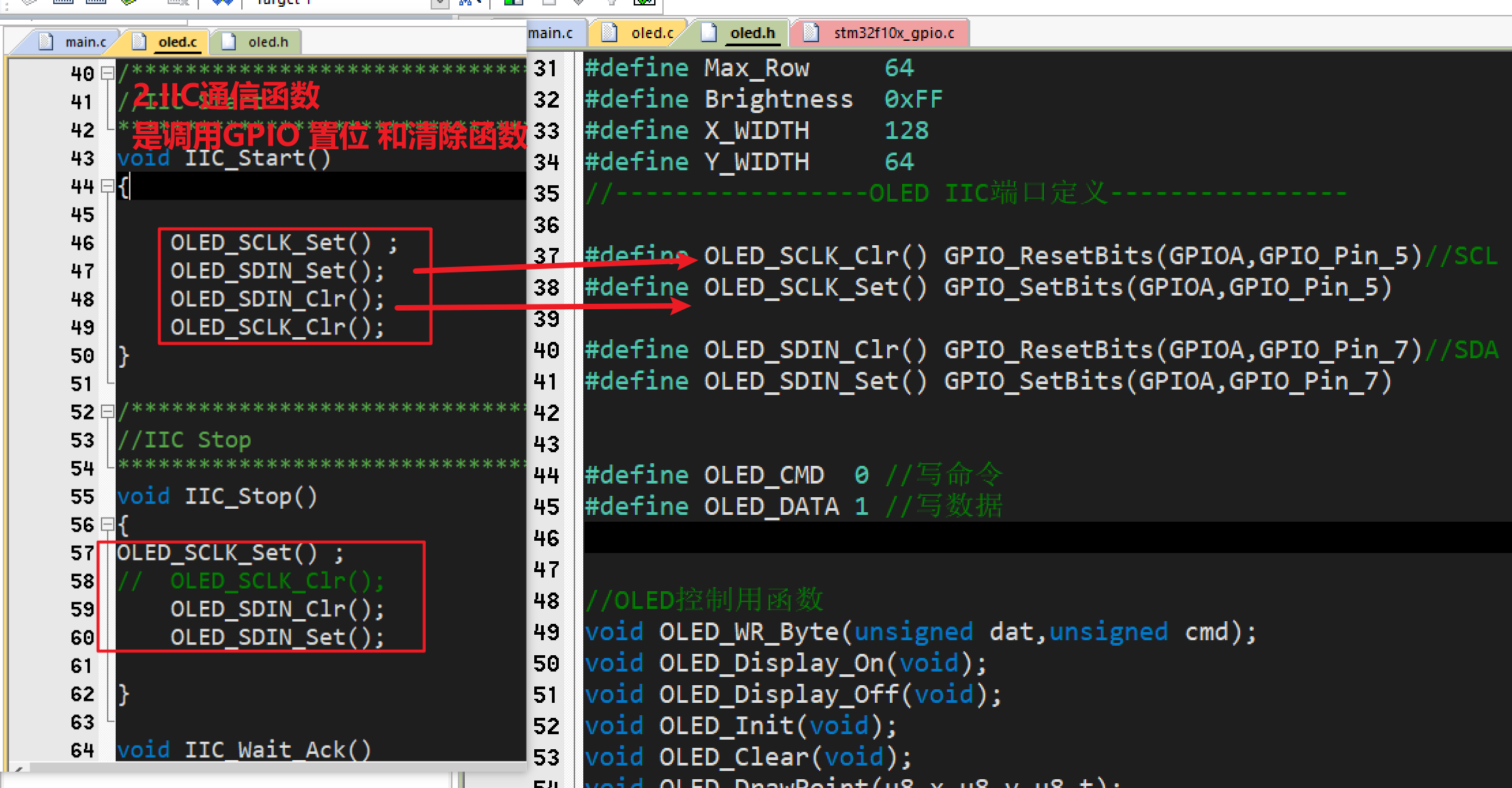
所谓我们移植的时候替换相关初始化内容和GPIO置为函数就行
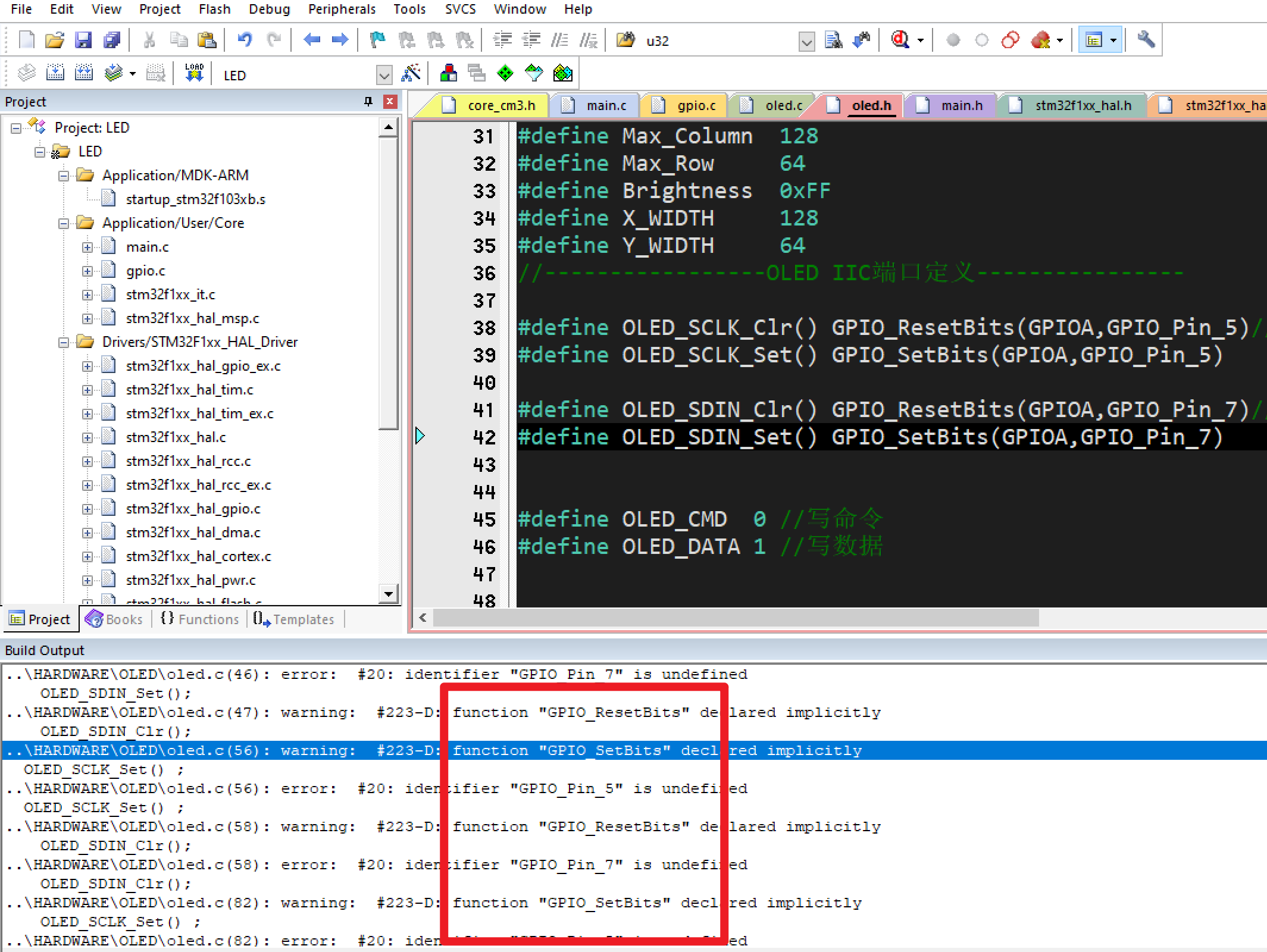
3.3-解决一些错误
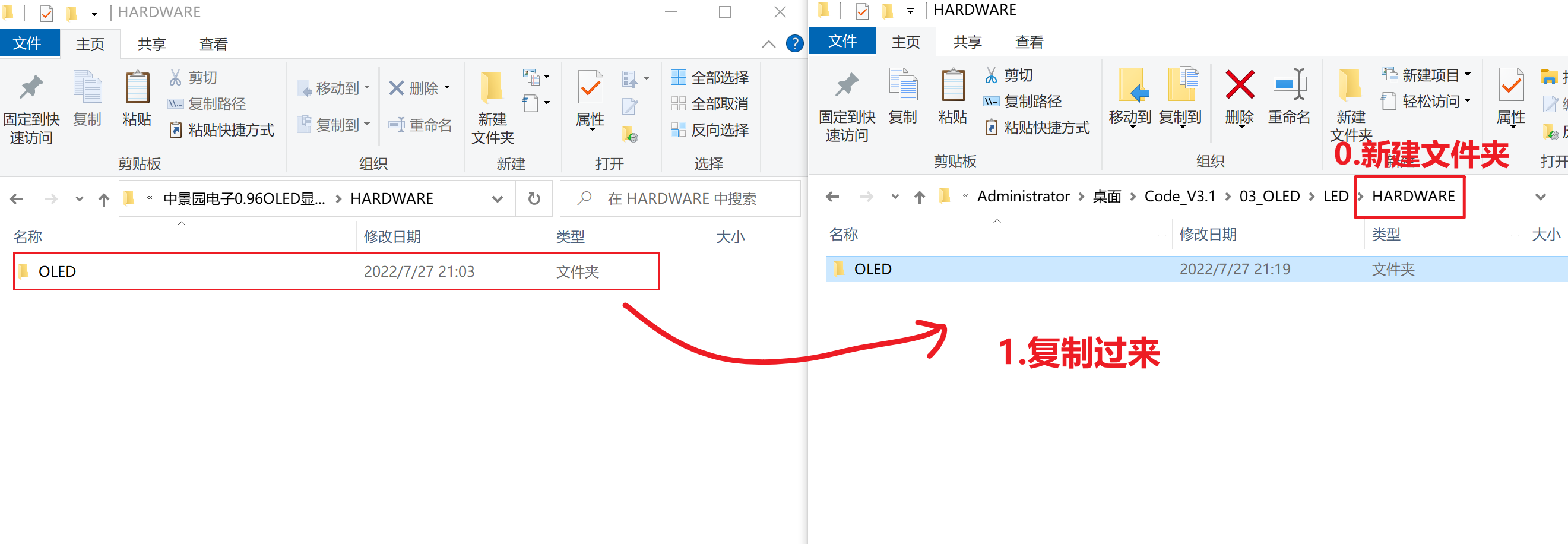
把OLED文件复制过去
添加组和包含文件


选择添加路径

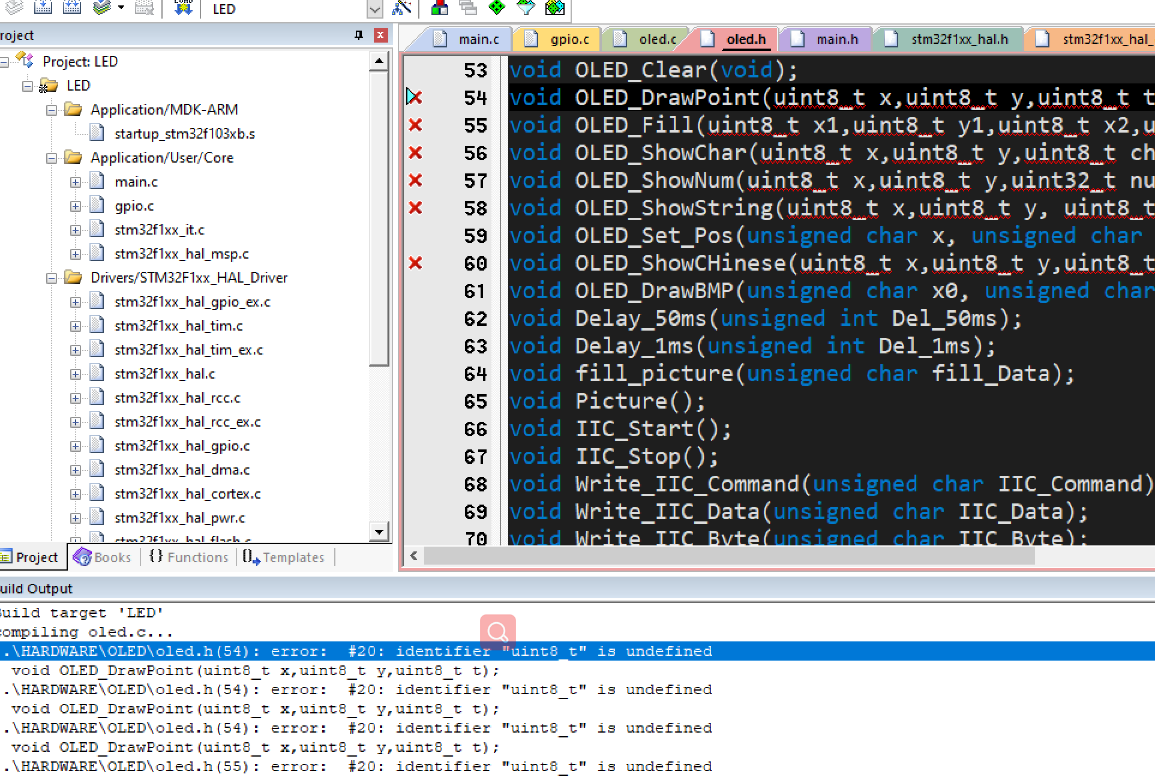
编译一下–找不到sys.h 删掉sys.h

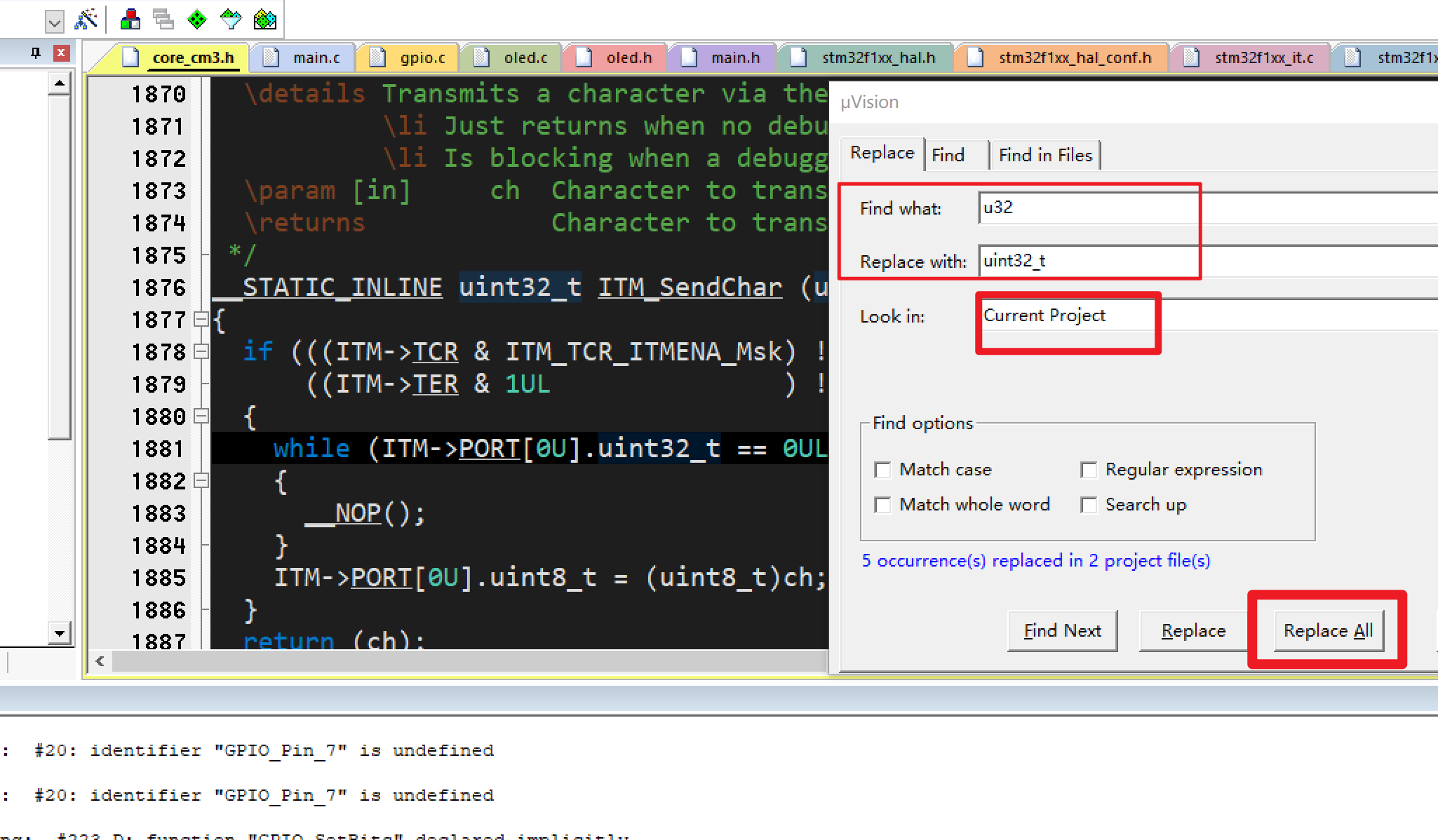
编译一下–把所有的u8都替换成uint8_t u32 替换成uint32_t
编译报错 找不到uint8_t 包含一下#include “main.h” 解决
有警告 声明加上void

下面是一些GPIO的错误,我要解决初始化问题了
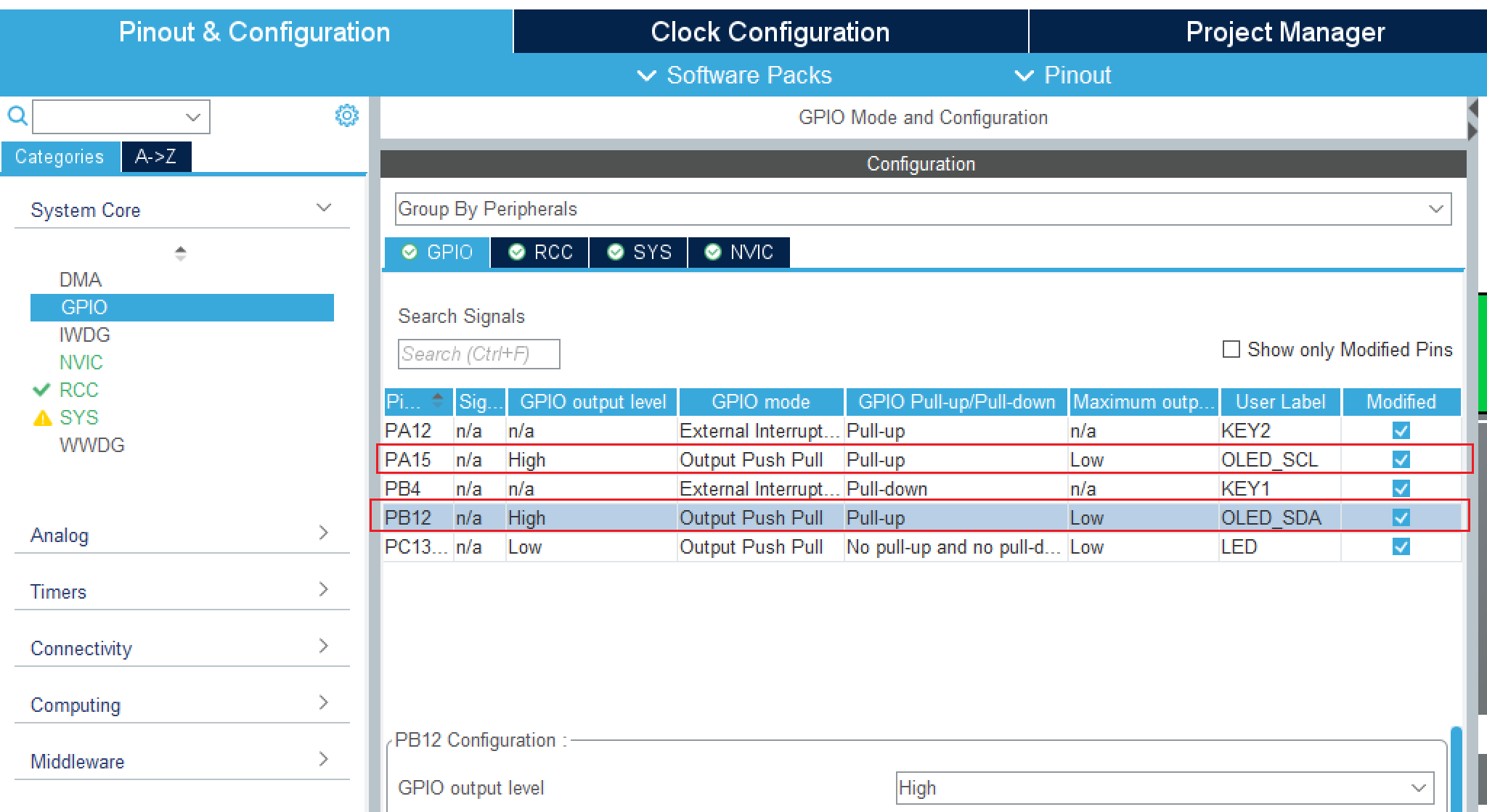
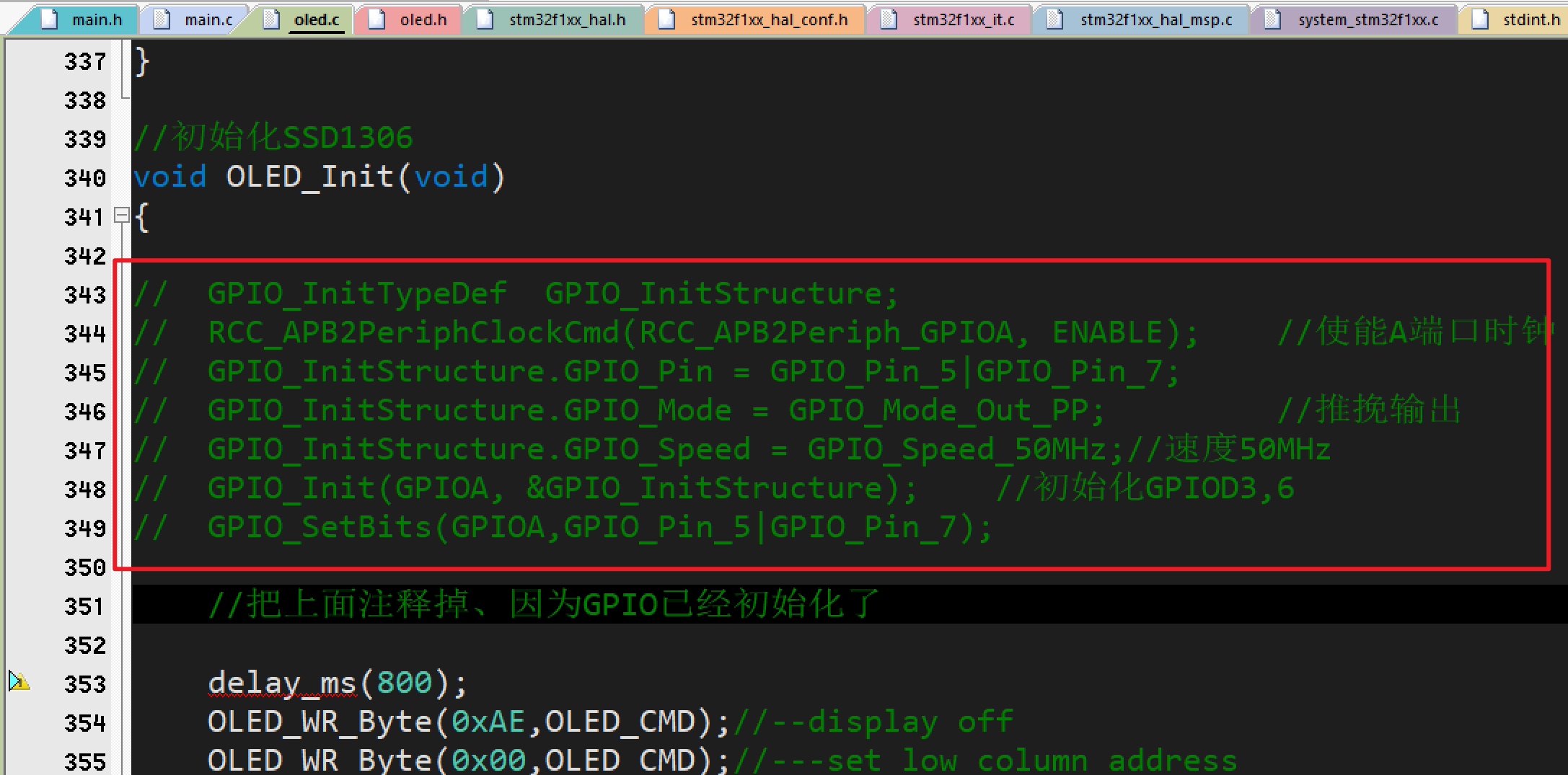
3.4-开始初始化OLED
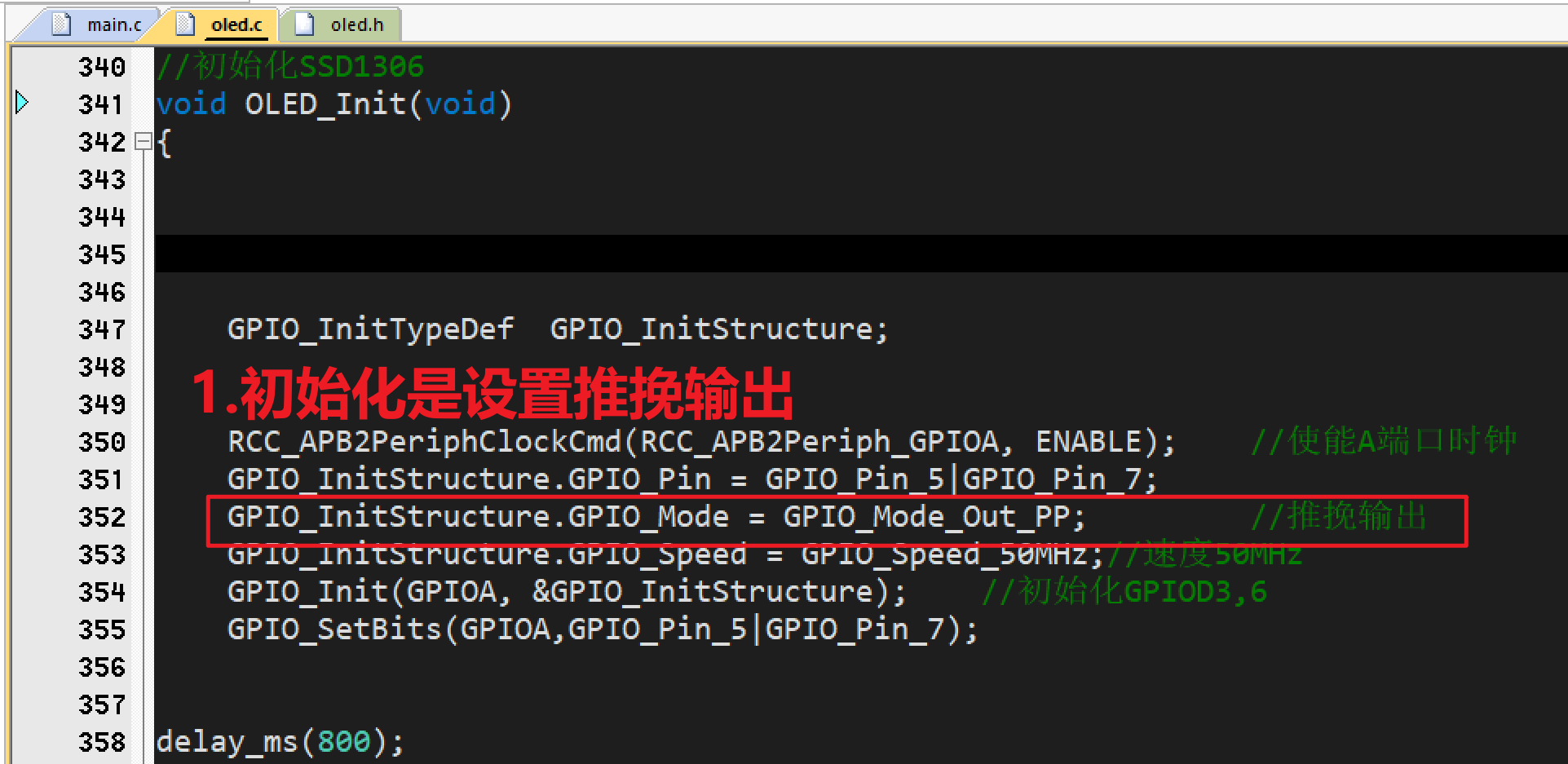
先看原理图 SDA-PB12 SCL-PA15

然后我们开始初始两个GPIO为输出模式–上拉输出模式
然后我们生成代码,更改一下IIC协议的GPIO设置,和初始化部分
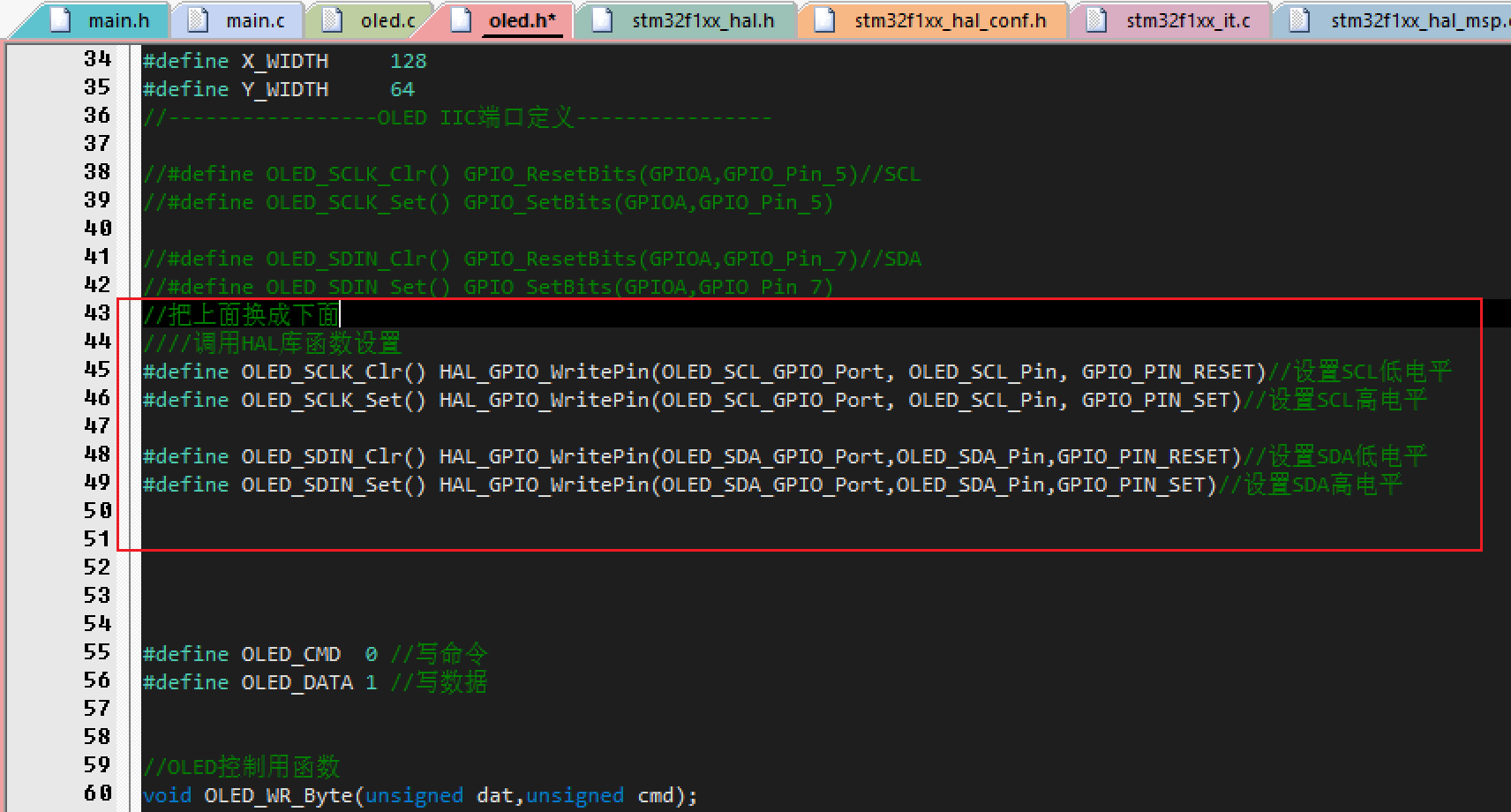
#define OLED_SCLK_Clr() HAL_GPIO_WritePin(OLED_SCL_GPIO_Port, OLED_SCL_Pin, GPIO_PIN_RESET)//设置SCL低电平
#define OLED_SCLK_Set() HAL_GPIO_WritePin(OLED_SCL_GPIO_Port, OLED_SCL_Pin, GPIO_PIN_SET)//设置SCL高电平
#define OLED_SDIN_Clr() HAL_GPIO_WritePin(OLED_SDA_GPIO_Port,OLED_SDA_Pin,GPIO_PIN_RESET)//设置SDA低电平
#define OLED_SDIN_Set() HAL_GPIO_WritePin(OLED_SDA_GPIO_Port,OLED_SDA_Pin,GPIO_PIN_SET)//设置SDA高电平
下面delay函数出现报错 我们替换成HAL_Delay
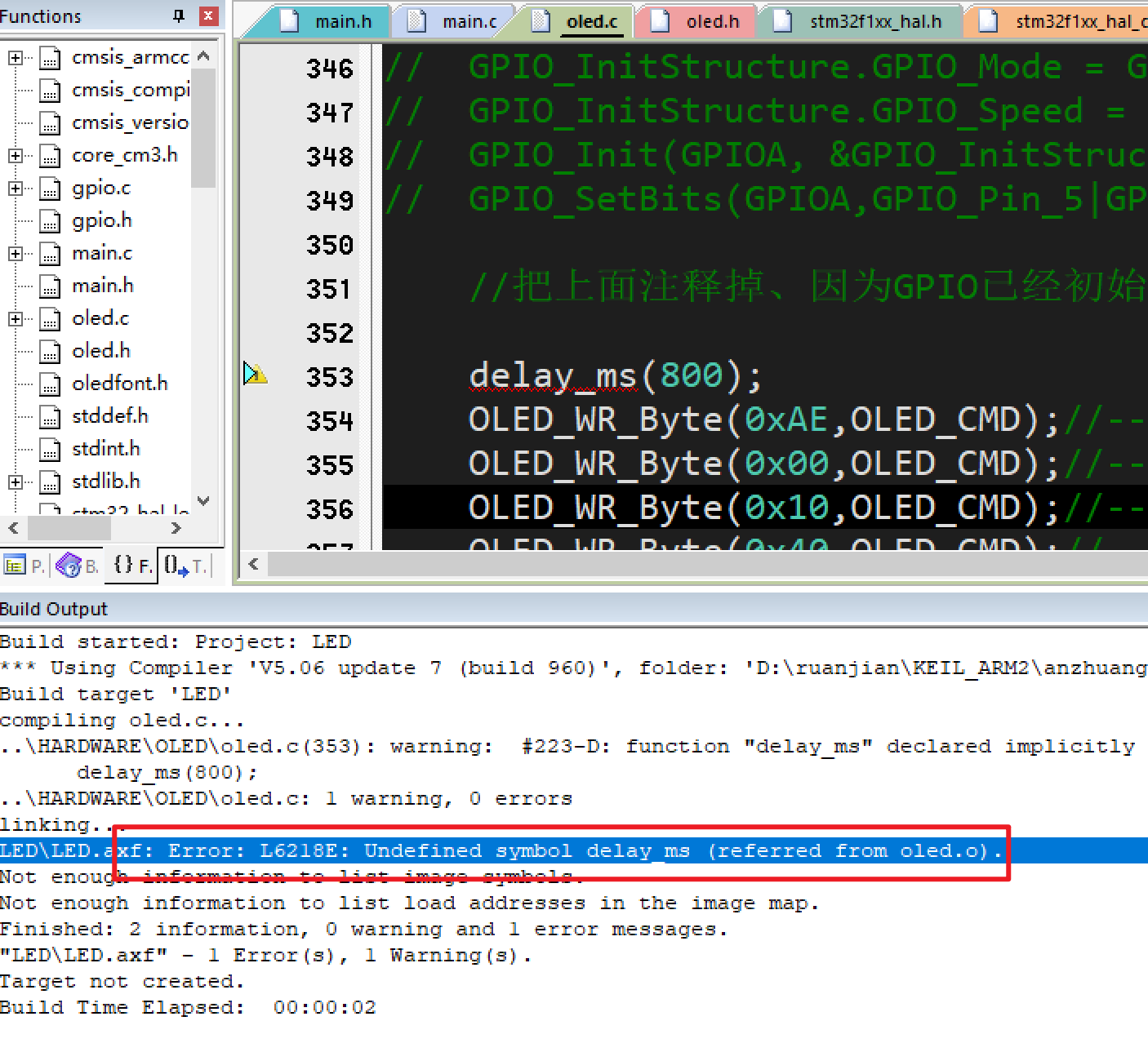
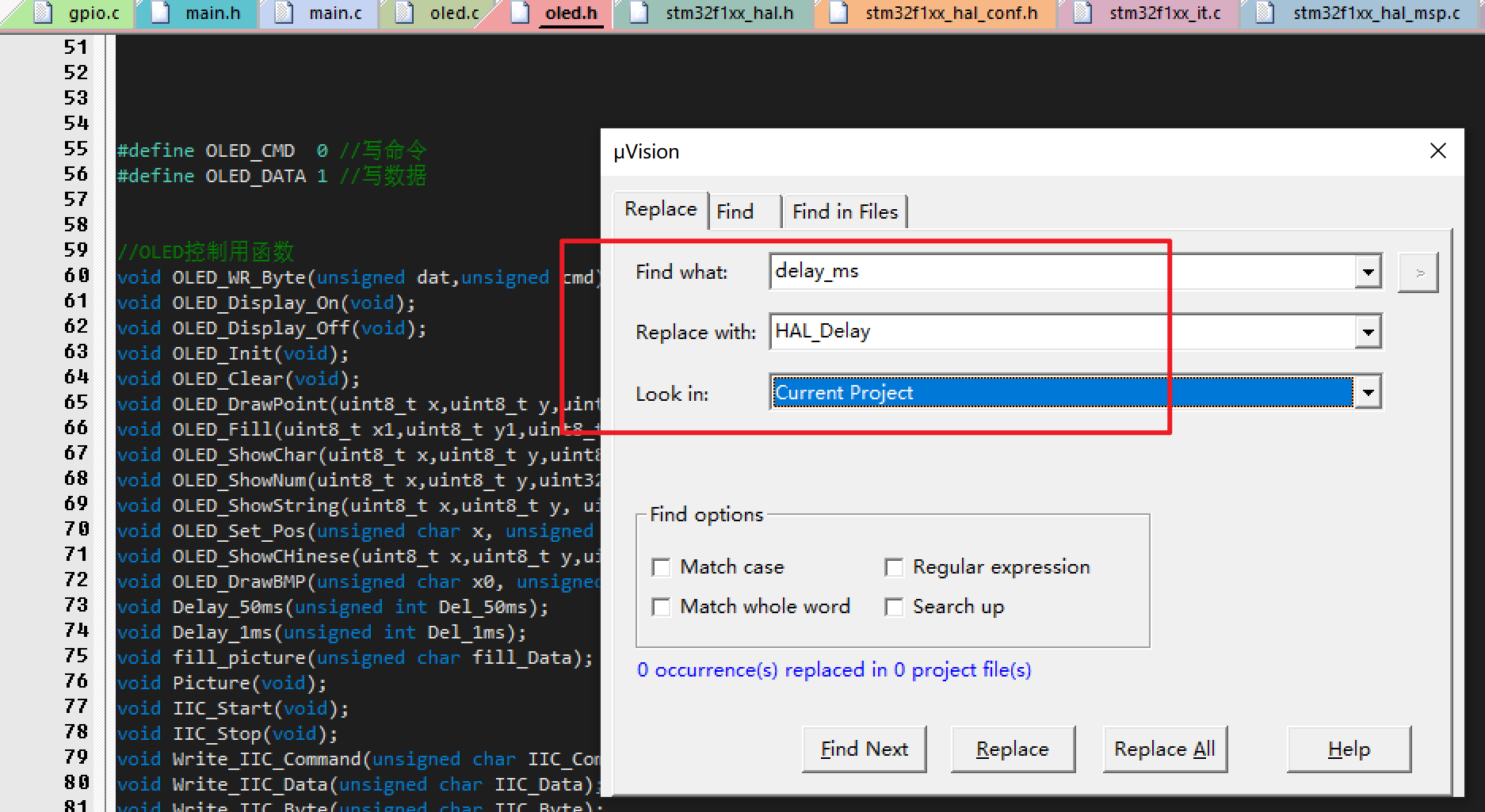
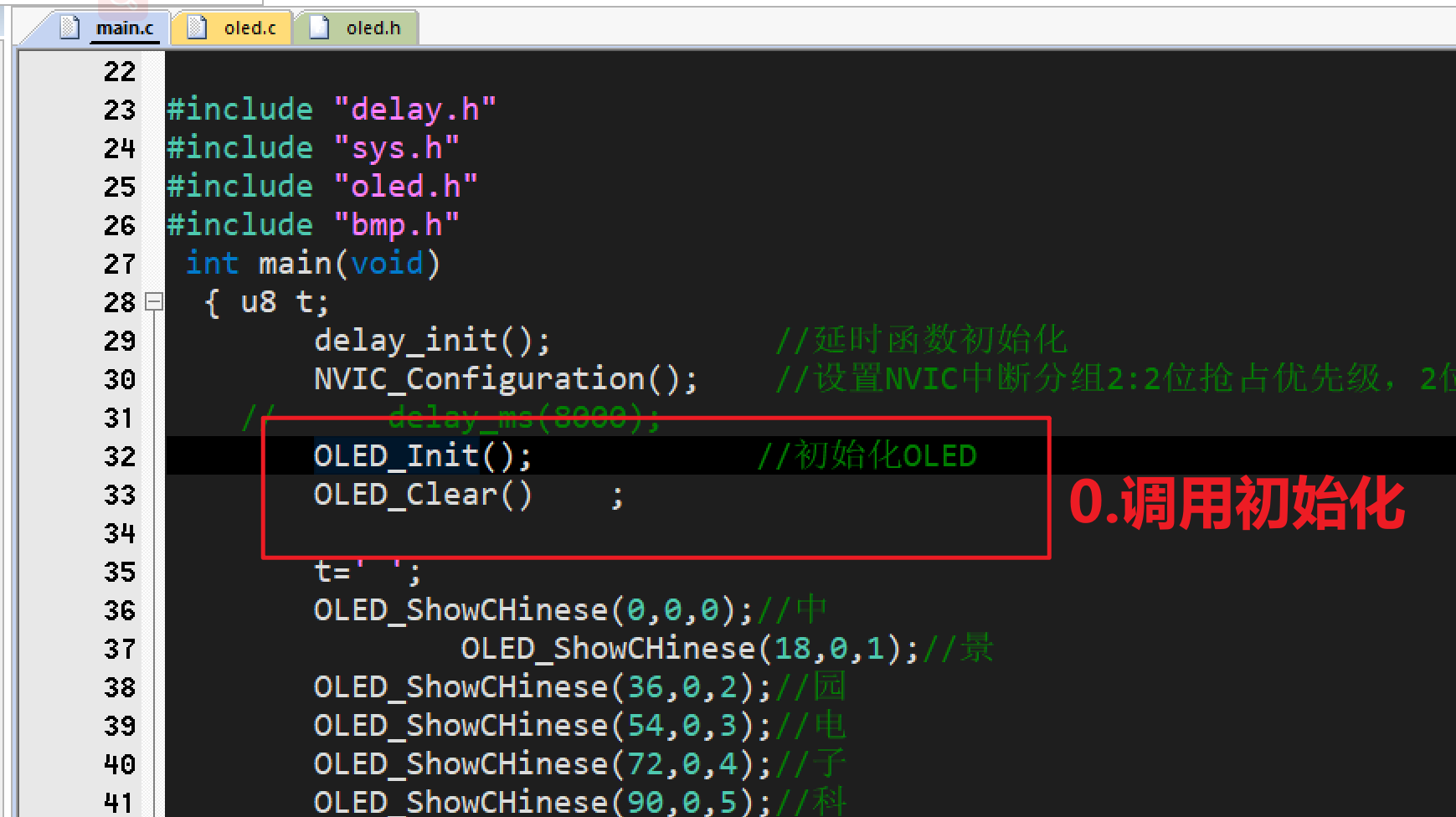
编译没有报错了,我们在主函数添加初始化和测试代码
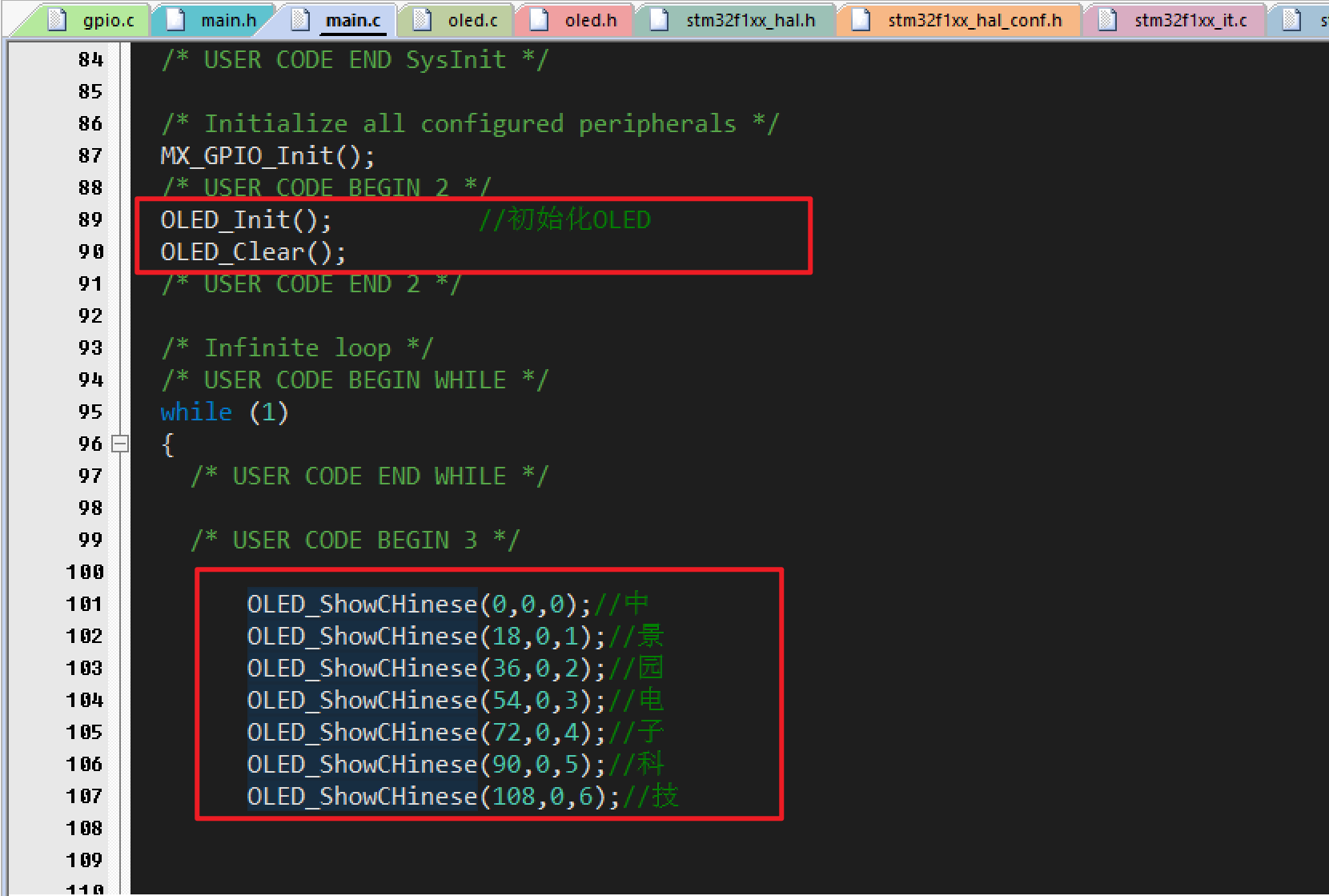
OLED_Init(); //初始化OLED
OLED_Clear();
OLED_ShowCHinese(0,0,0);//中
OLED_ShowCHinese(18,0,1);//景
OLED_ShowCHinese(36,0,2);//园
OLED_ShowCHinese(54,0,3);//电
OLED_ShowCHinese(72,0,4);//子
OLED_ShowCHinese(90,0,5);//科
OLED_ShowCHinese(108,0,6);//技
烧录下载 现象OLED屏幕显示-中景园电子科技
第四章-串口实验(简单输出)
这里我们先初始化串口一、实现数据输出。
4.1-串口编写
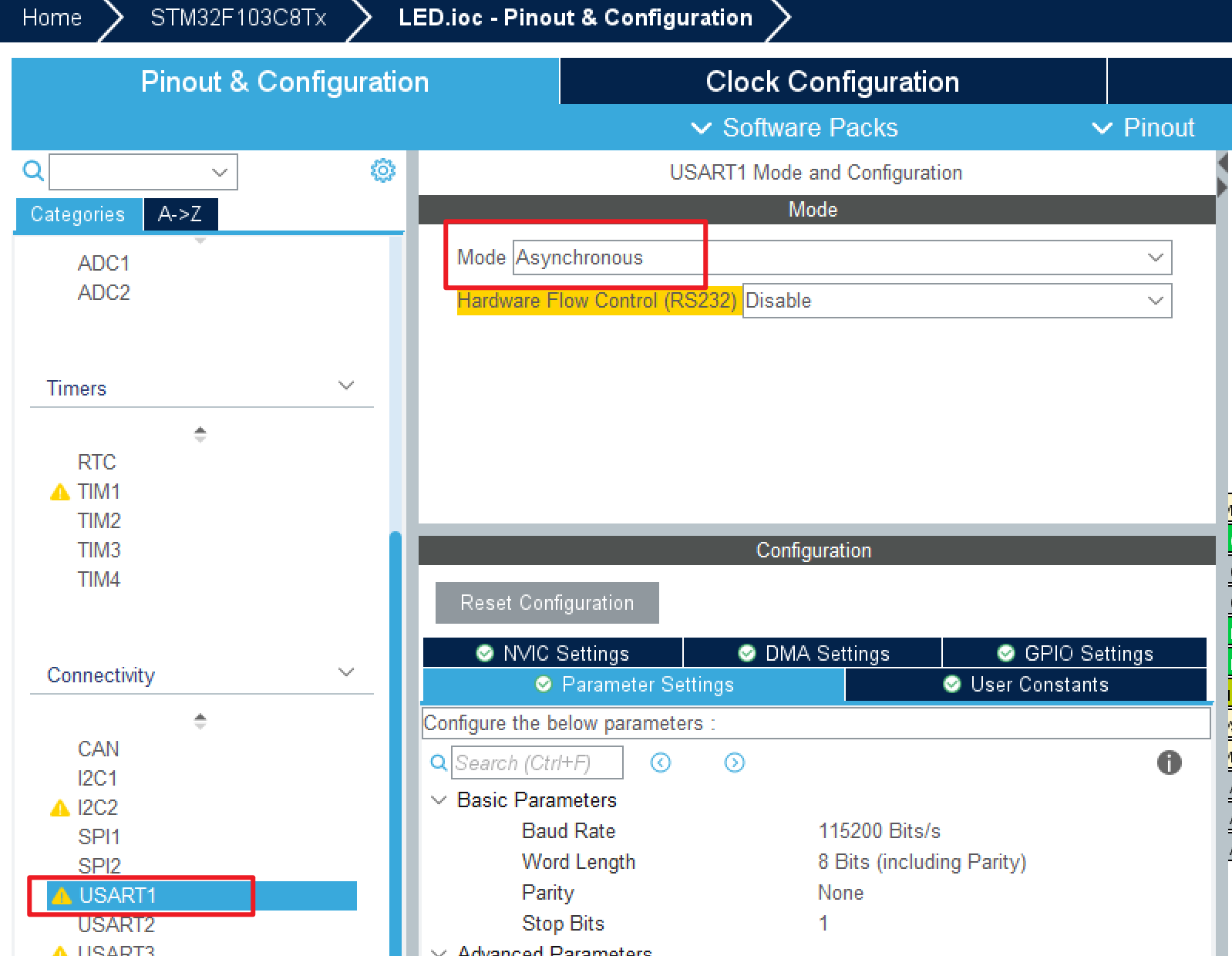
软件初始化
然后我们实现串口数据输出
方法一:
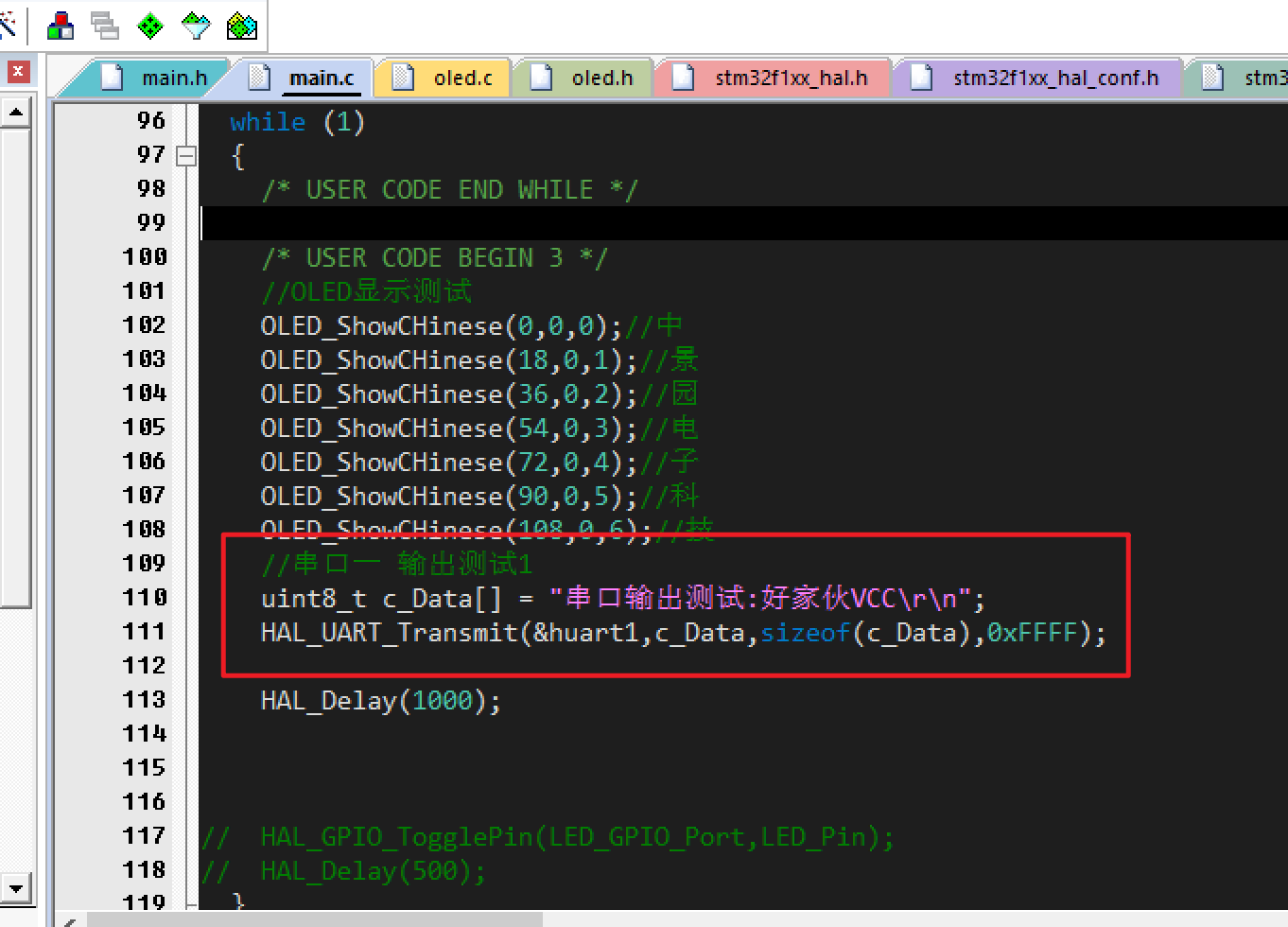
uint8_t c_Data[] = "串口输出测试:好家伙VCC\r\n";
HAL_UART_Transmit(&huart1,c_Data,sizeof(c_Data),0xFFFF);
HAL_Delay(1000);
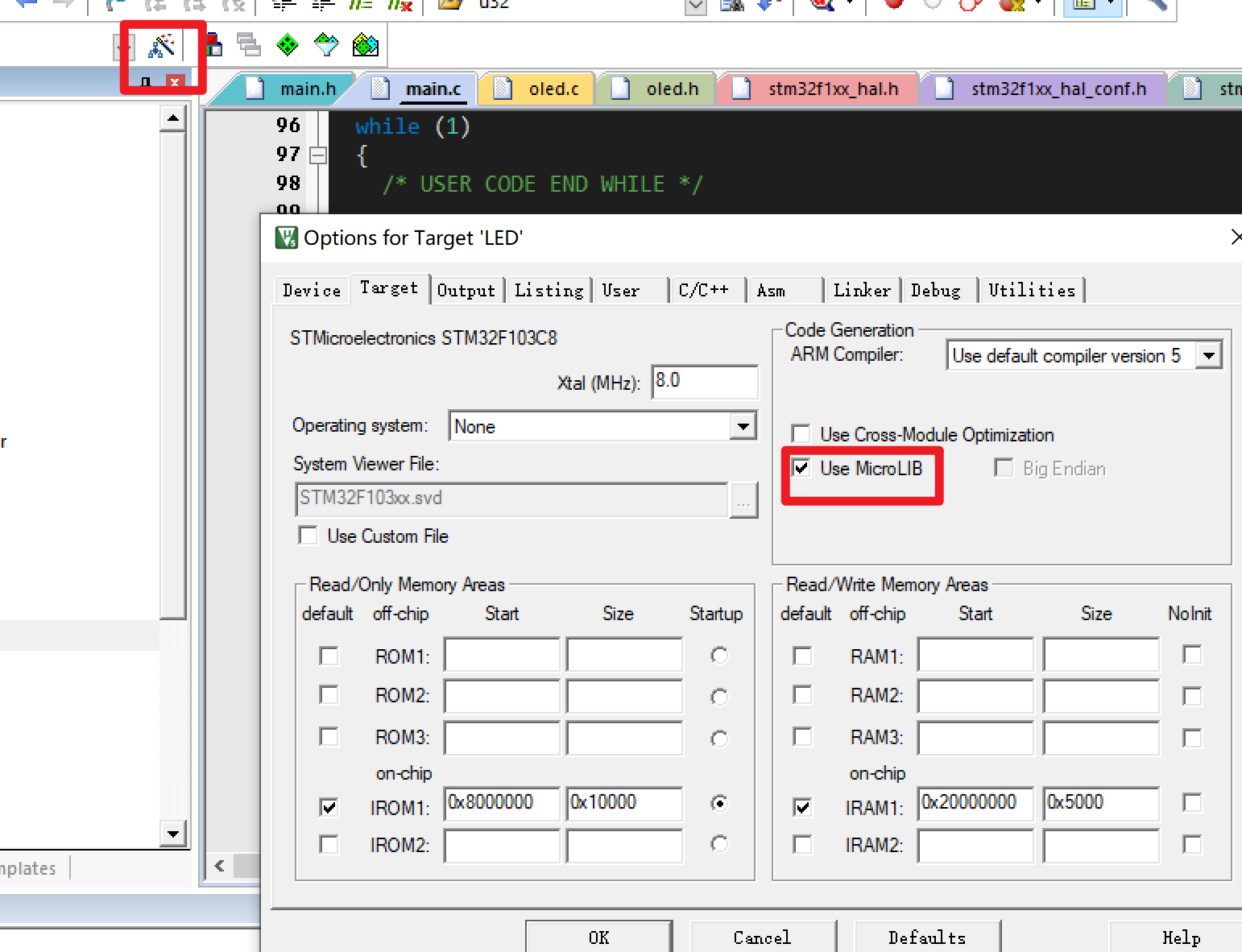
方法二:实现printf函数
打开微库
重定向fputc
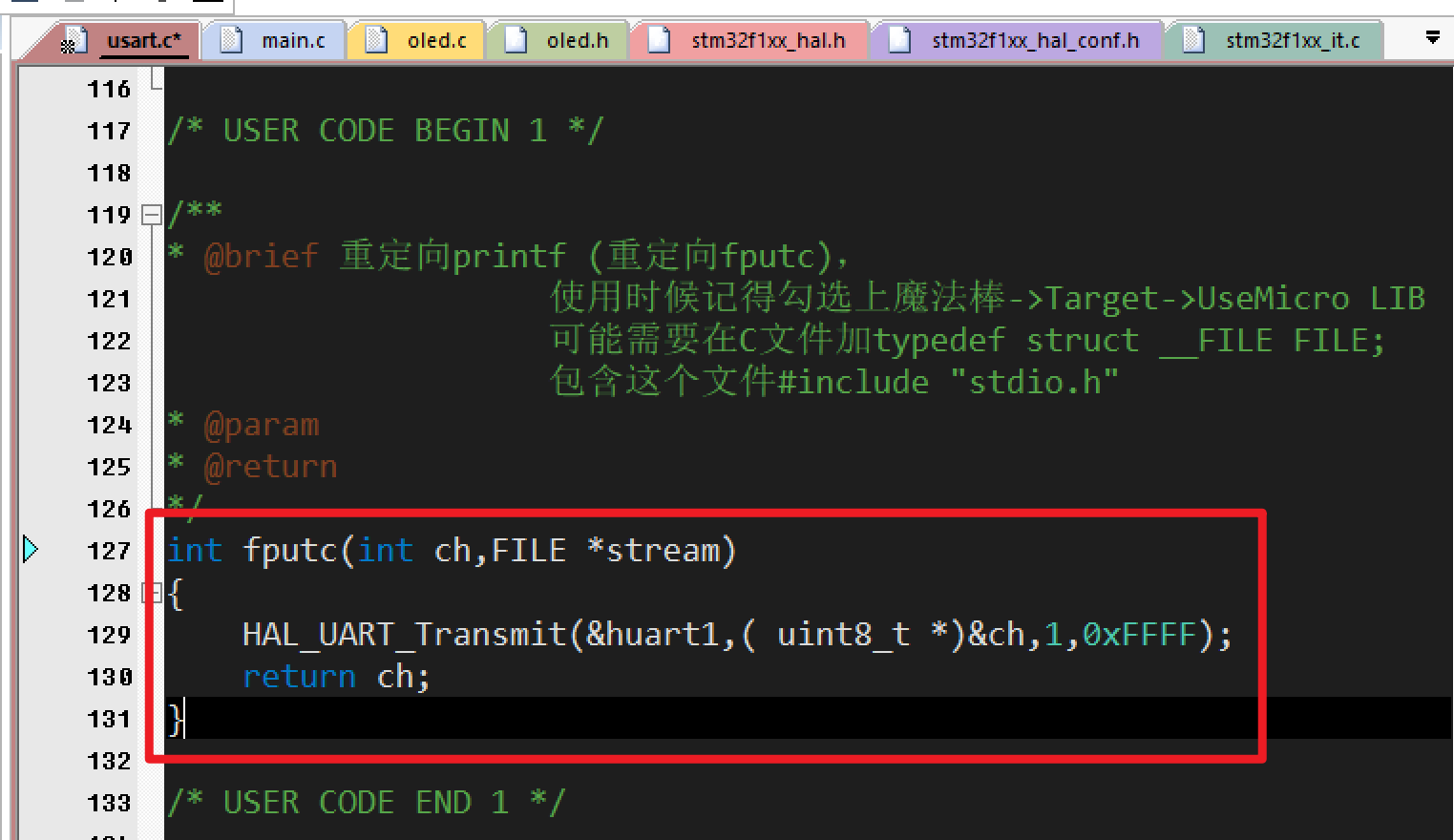
/**
* @brief 重定向printf (重定向fputc),
使用时候记得勾选上魔法棒->Target->UseMicro LIB
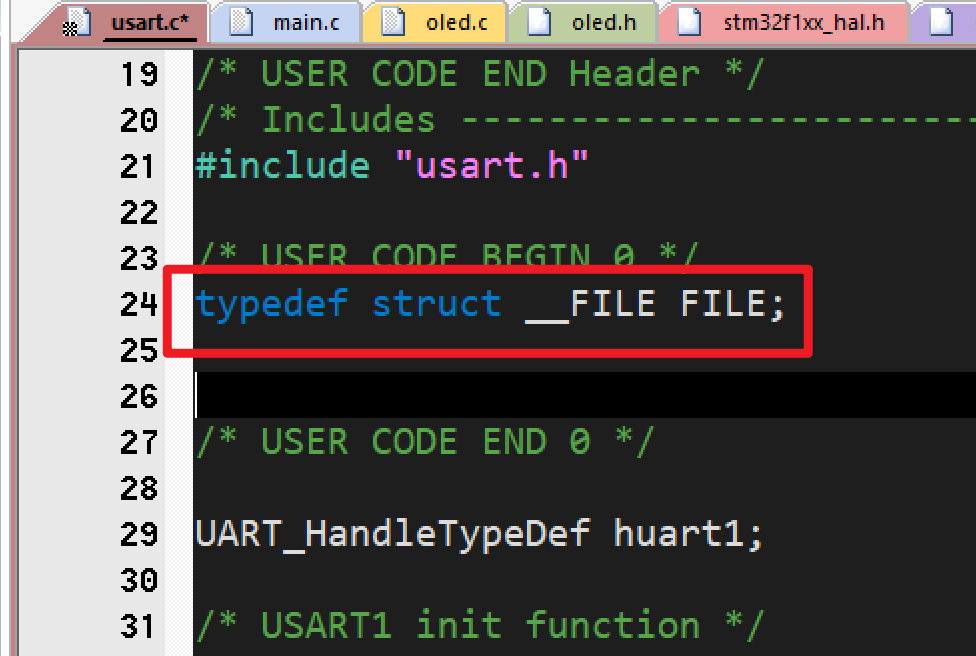
可能需要在C文件加typedef struct __FILE FILE;
包含这个文件#include "stdio.h"
* @param
* @return
*/
int fputc(int ch,FILE *stream)
{
HAL_UART_Transmit(&huart1,( uint8_t *)&ch,1,0xFFFF);
return ch;
}
如果有错误
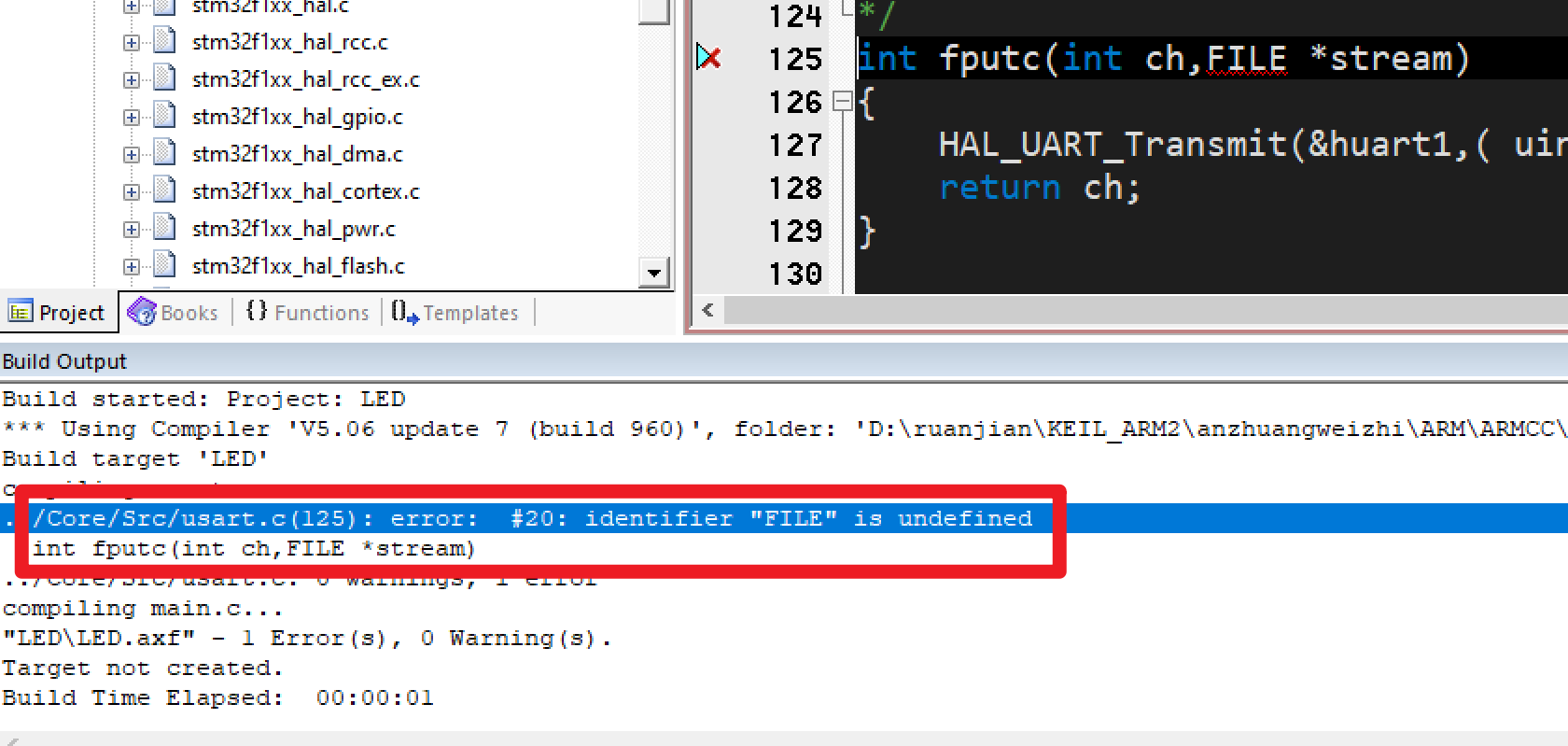
在usart.c添加这个typedef struct __FILE FILE;
添加一下测试(记得包含"stdio.h")
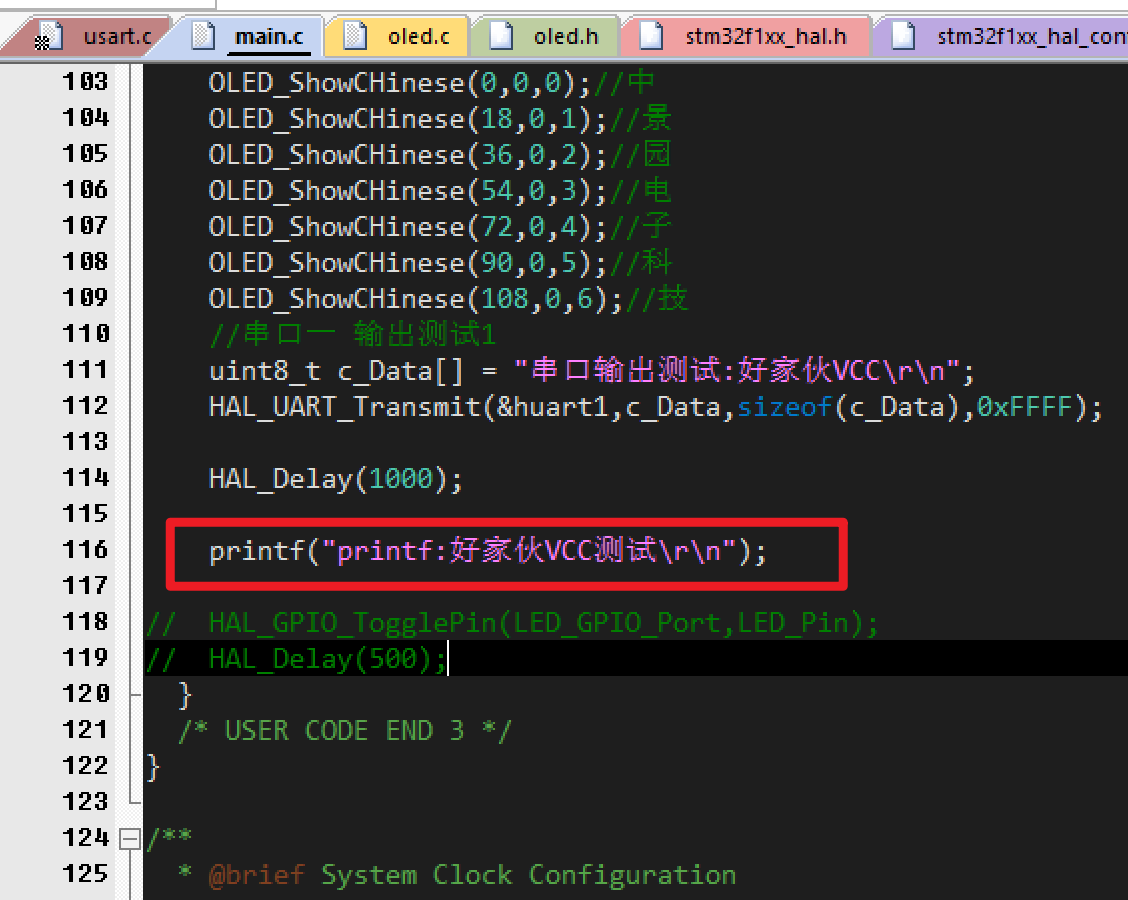
printf("printf:好家伙VCC测试\r\n");
4.2-串口实验
接线图
先烧录好,再连接串口查看现象
连接串口 可以使用 USB转TTL如CH340模块 或者 用DAP的串口功能
使用USB转TTL如CH340模块
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0PsmFk7B-1675083353063)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221229214107521.png)]
使用DAP
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ib1hMh1b-1675083353064)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221229214655460.png)]
然后我们打开串口助手,选择串口端口和波特率,就可以看到输出
蓝牙模块使用
蓝牙模式使用在后面章节讲解
第五章-PWM控制电机
5.1-认识PWM
参数如何描述PWM

5.2-PWM配置
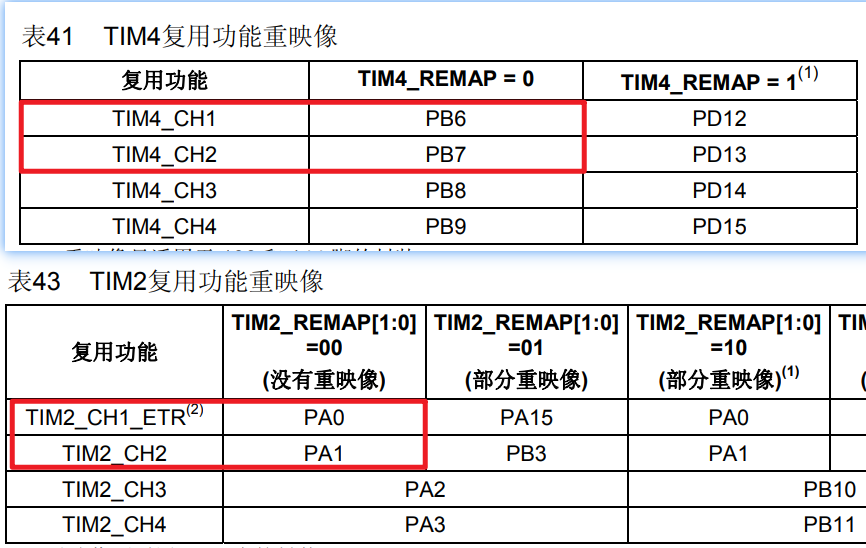
根据我们小车原理图我们知道是 PA11和PA8两个引脚要设置为PWM输出
这里为什么小车原理图要这样设计那?
- 根据A4950的使用要求
- 根据STM32F103C8T6的定时器复用功能重映射

我们这先介绍原因:
原因1:介绍电机驱动后,我们会说明
原因2: 因为STM32中文参考手册介绍了,TIM1_CH1和TIM1_CH4可以复用功能重映射到PA8和PA11

我们使用软件配置 PA11和PA8这里配置

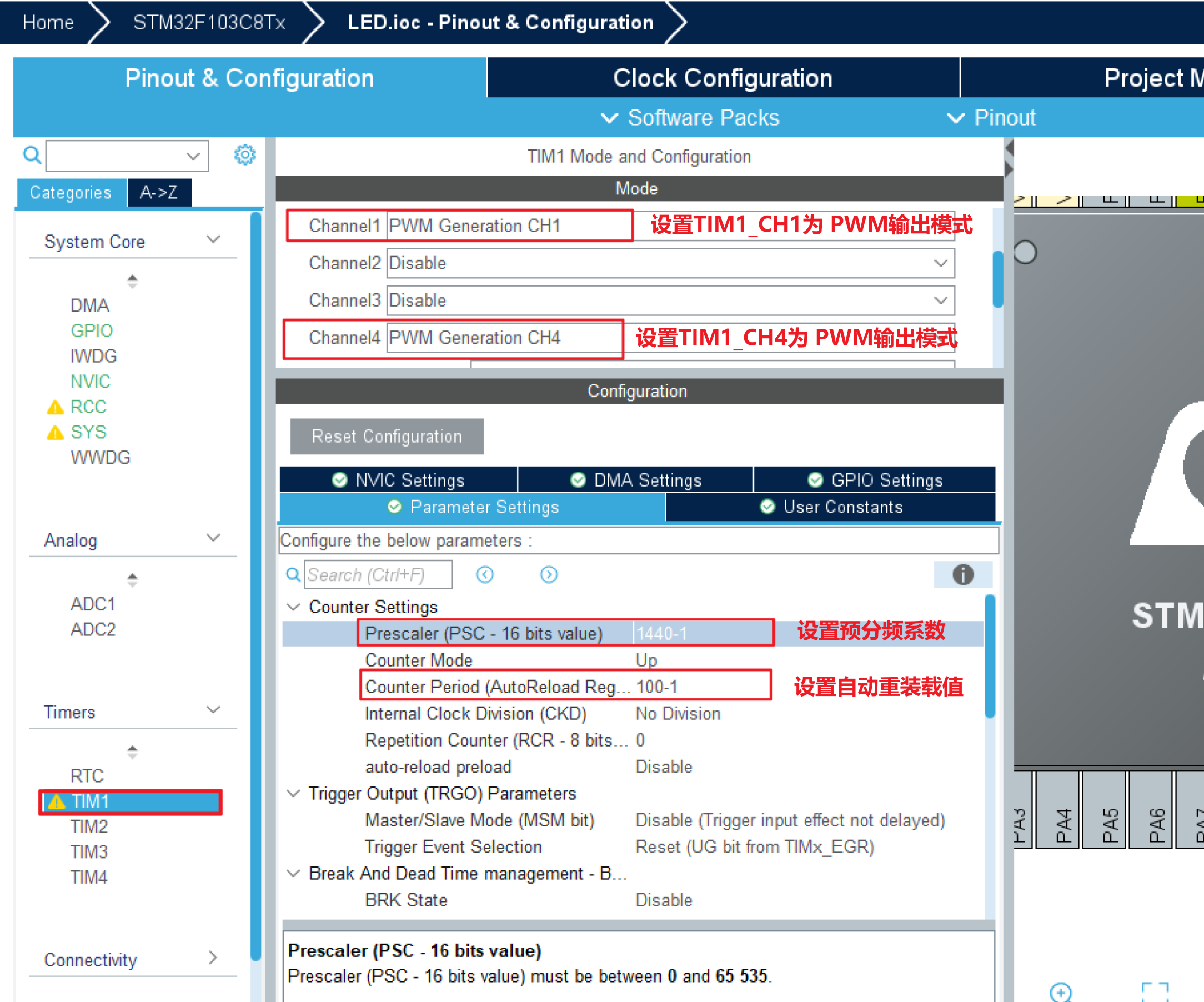
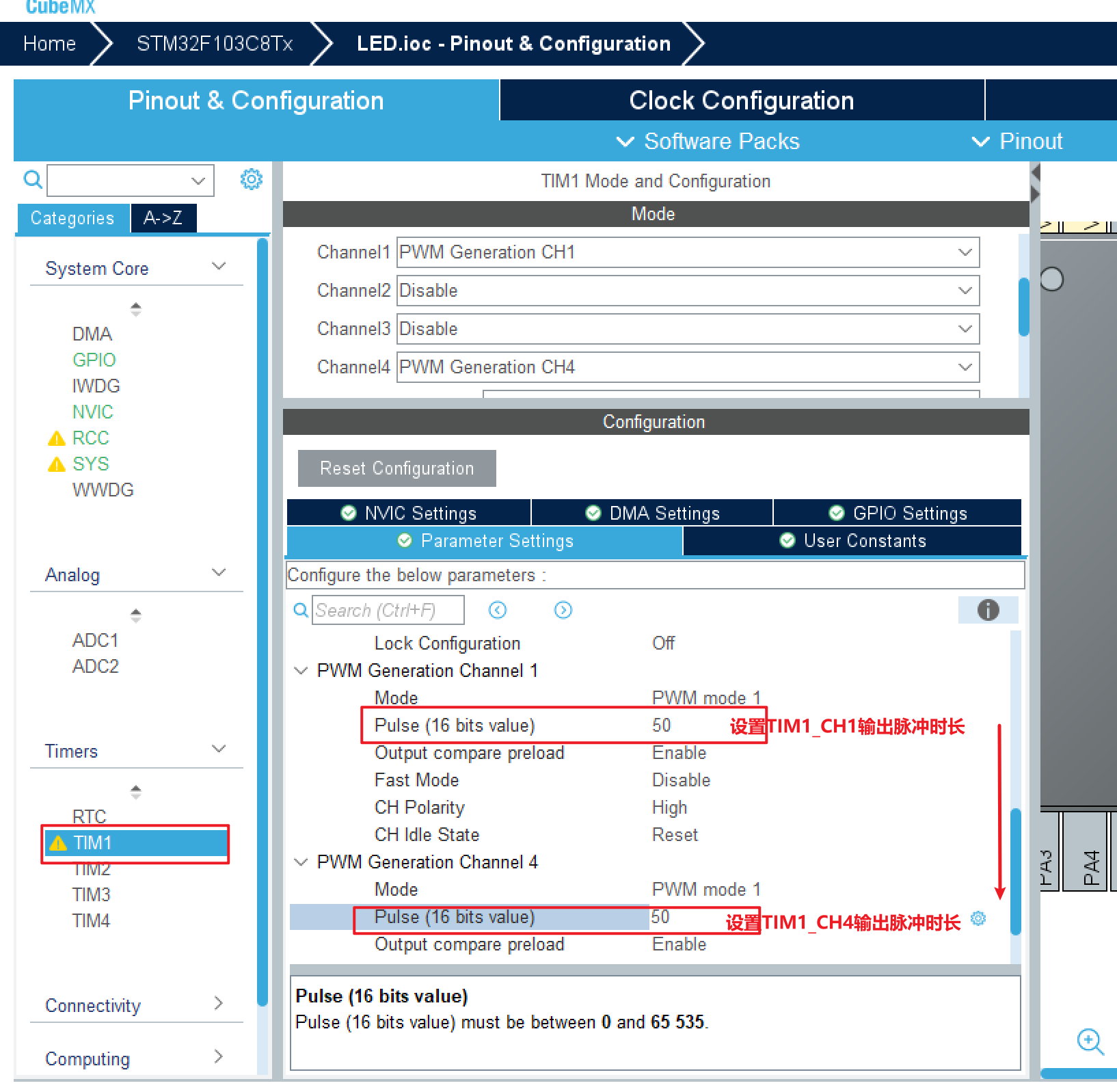
然后我们生成代码
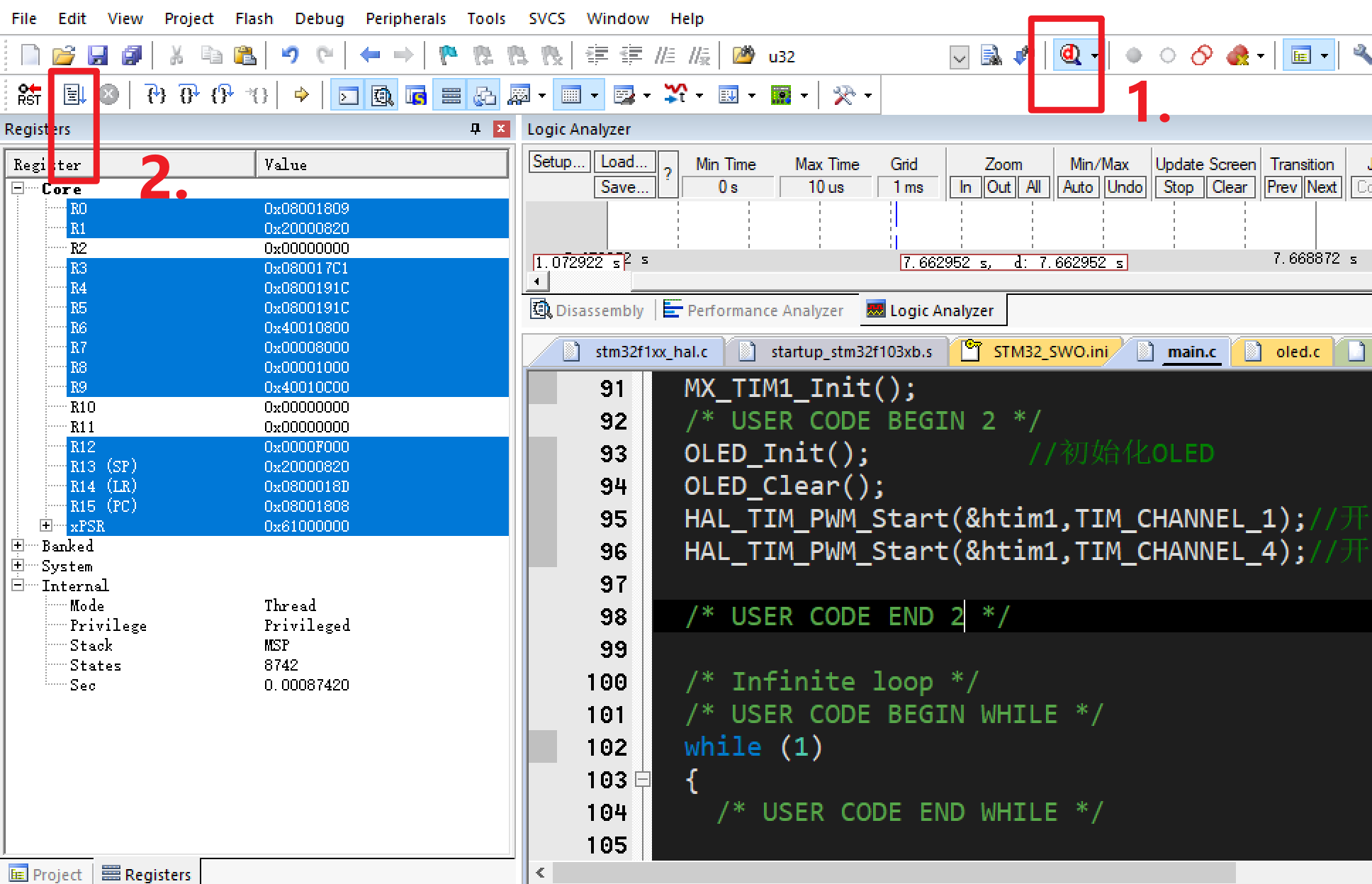
PWM输出的配置就已经完成了,但是不能输出产生PWM波,因为Cube在生成代码时,有很多外设初始化完后默认是关闭的,需要我们手动开启。

HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//开启定时器1 通道1 PWM输出
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);//开启定时器1 通道4 PWM输出
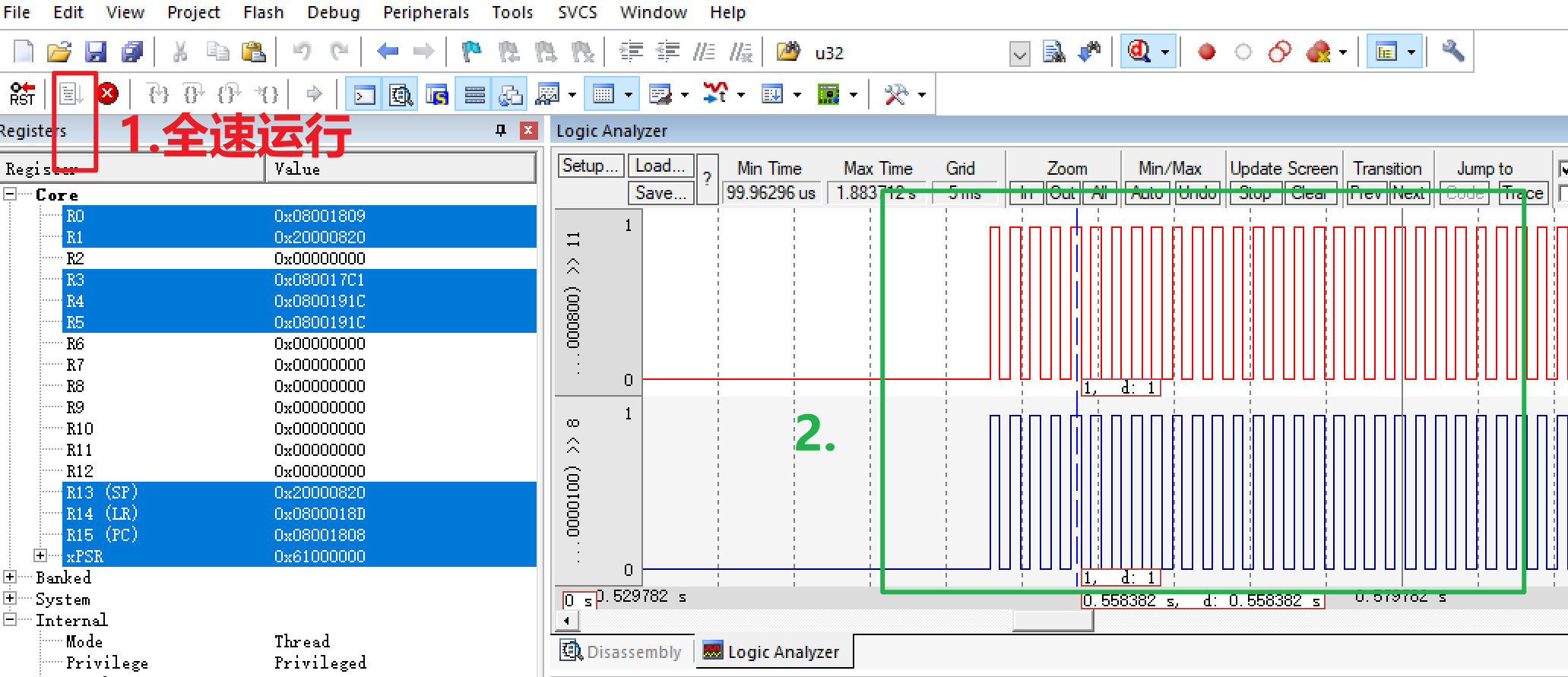
我们软件仿真一下、查看PA11与PA8波形
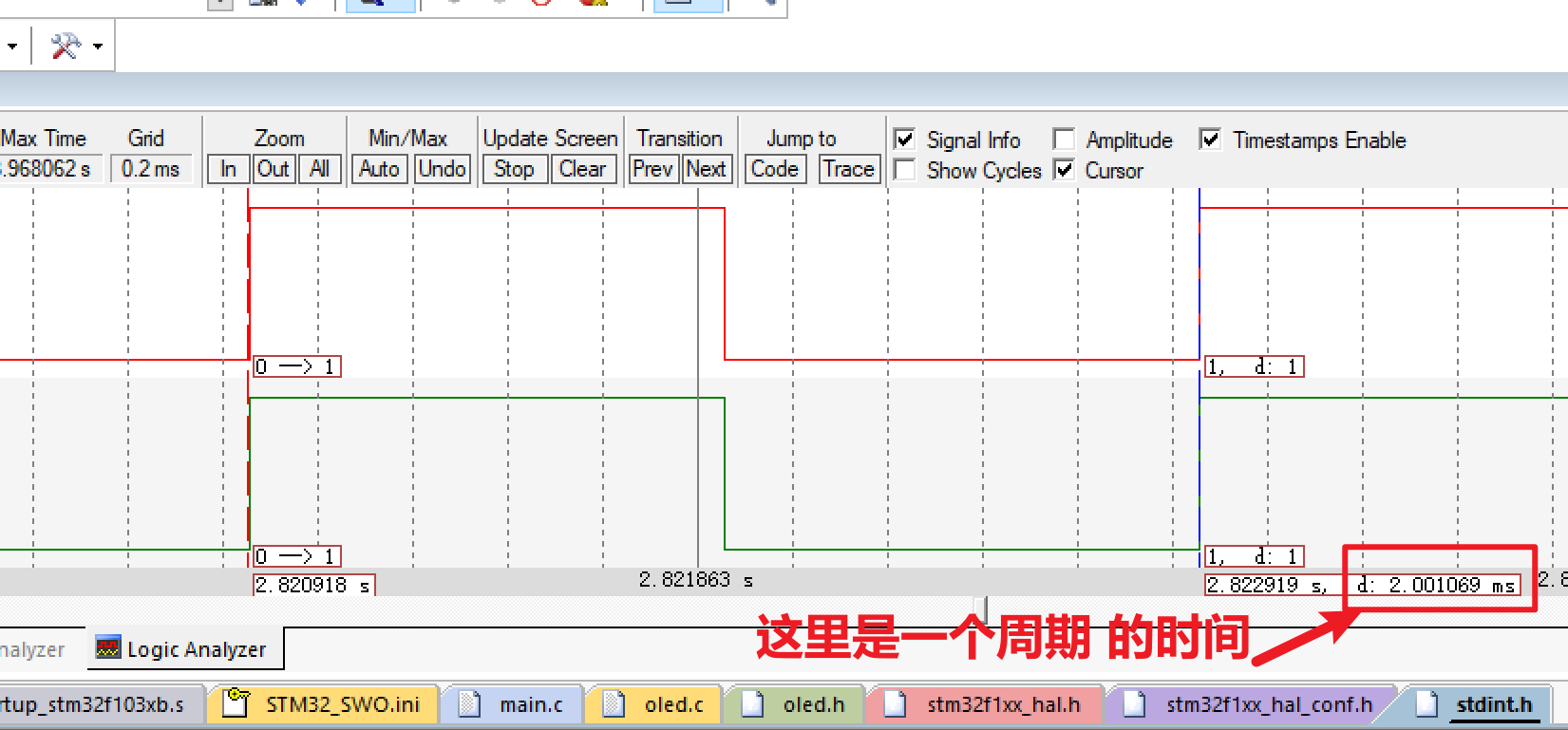
那么频率就是 1/0.002 = 500HZ
这就是我们要设置的
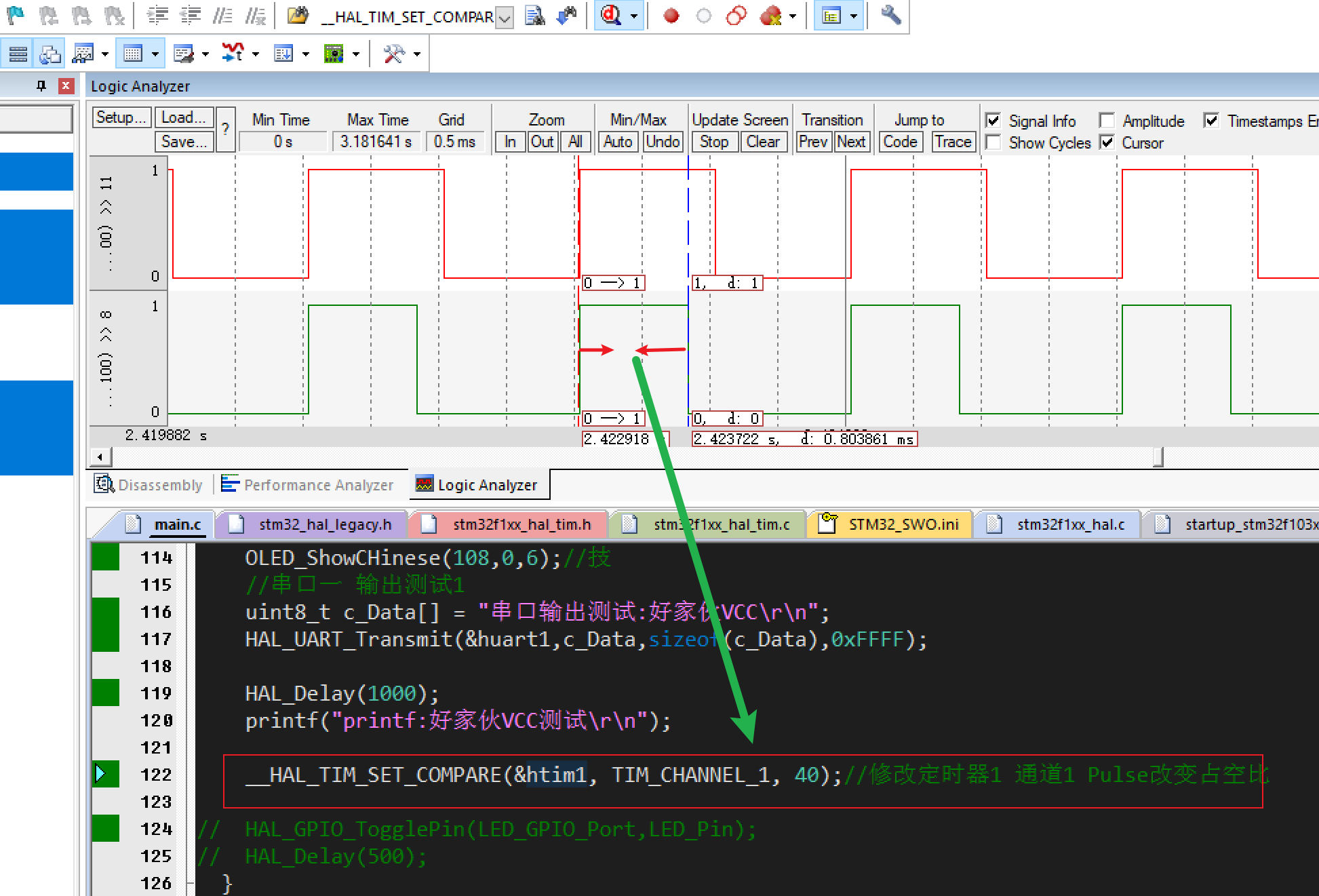
我们可以使用这个宏来修改占空比
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 40);
5.3-PWM测试方法
上面我们生成了PWM下面我们测试一下
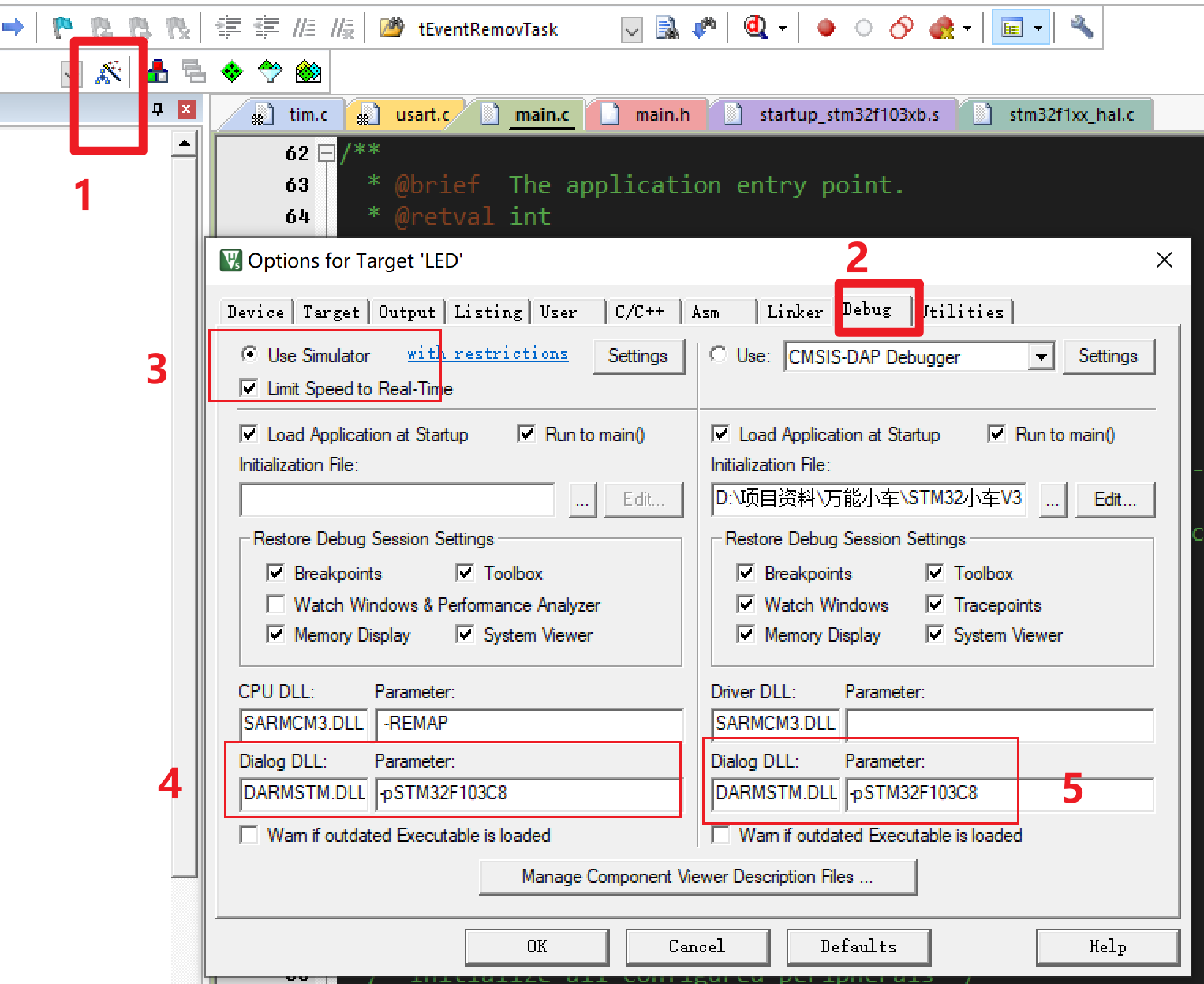
KEIL软件仿真方法:
软件模拟仿真不需要任何硬件-下面是官方介绍
选择软件仿真
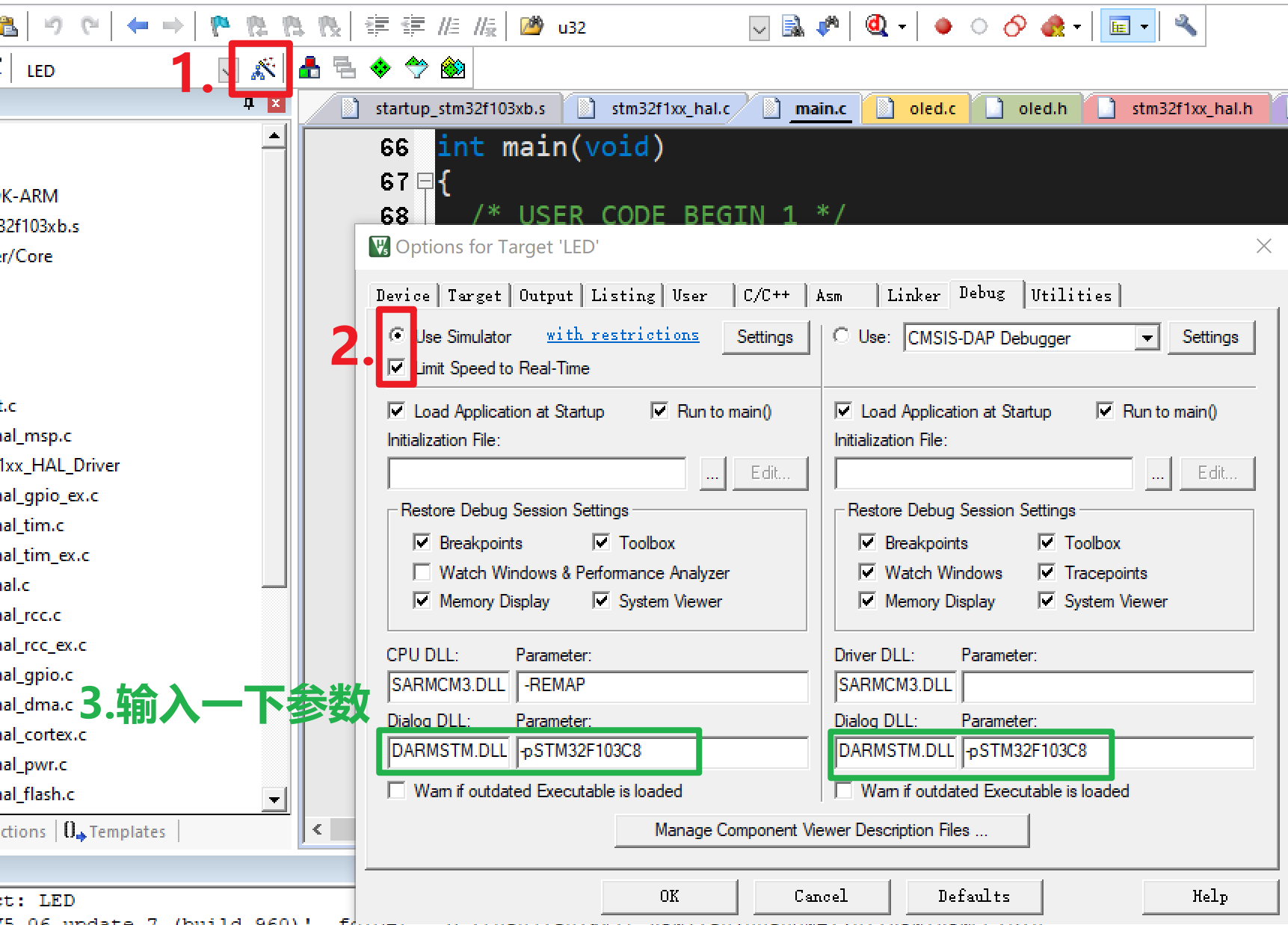
DARMSTM.DLL
-pSTM32F103C8
设置时钟频率-板子外部晶振8Mhz 这里我们选择8Mhz
(新版的keil5里没有那个设置频率的功能)
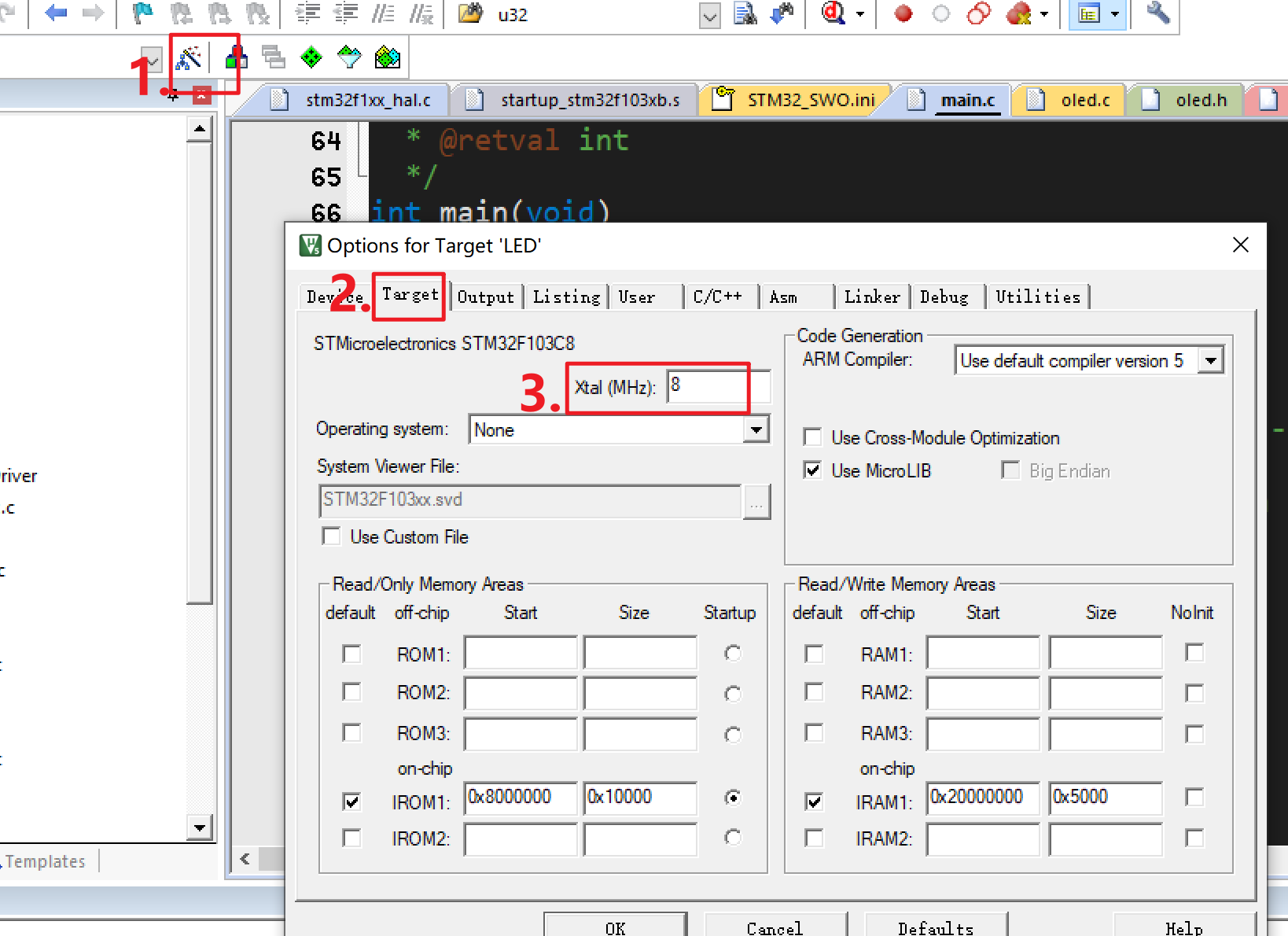
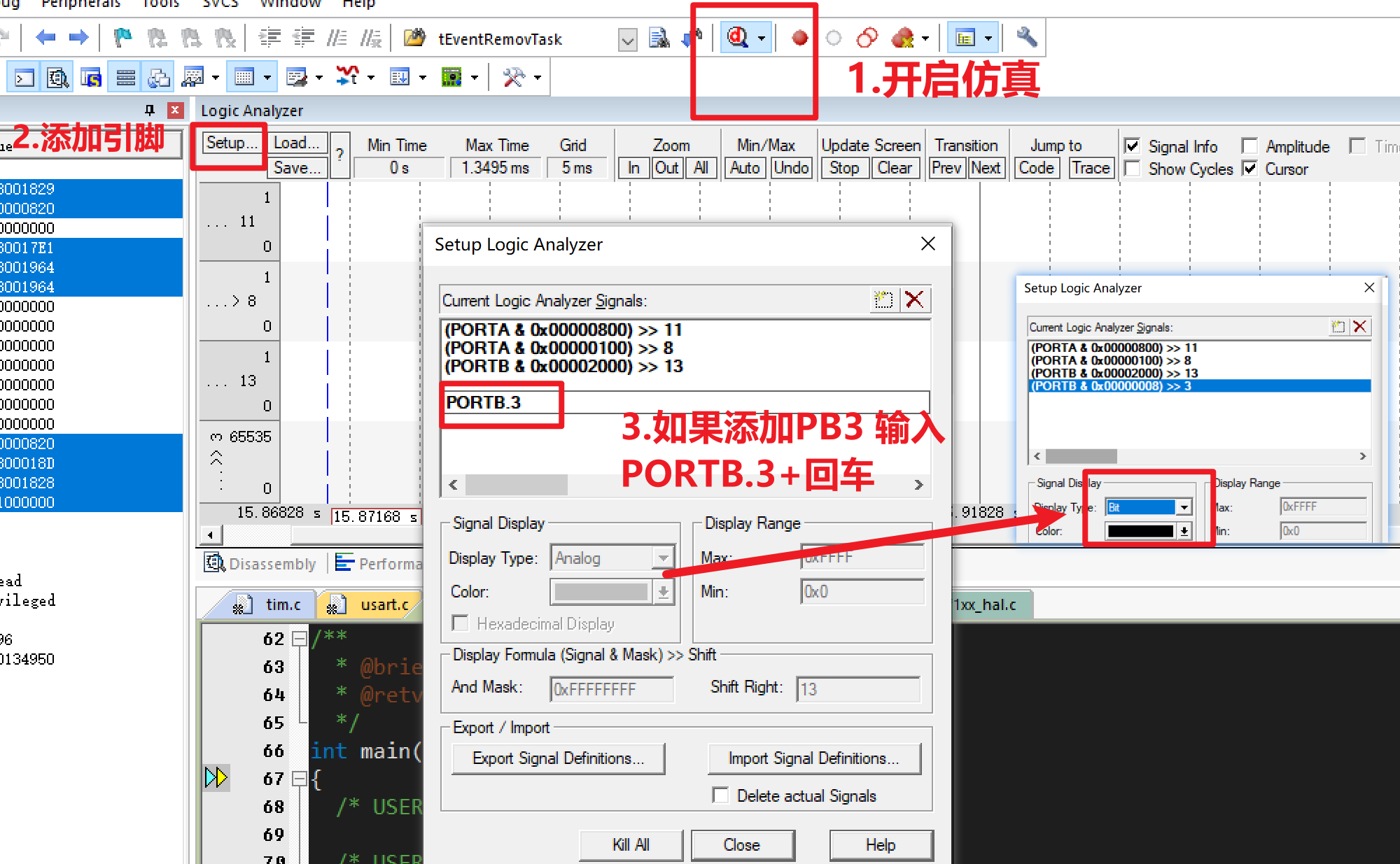
开启仿真
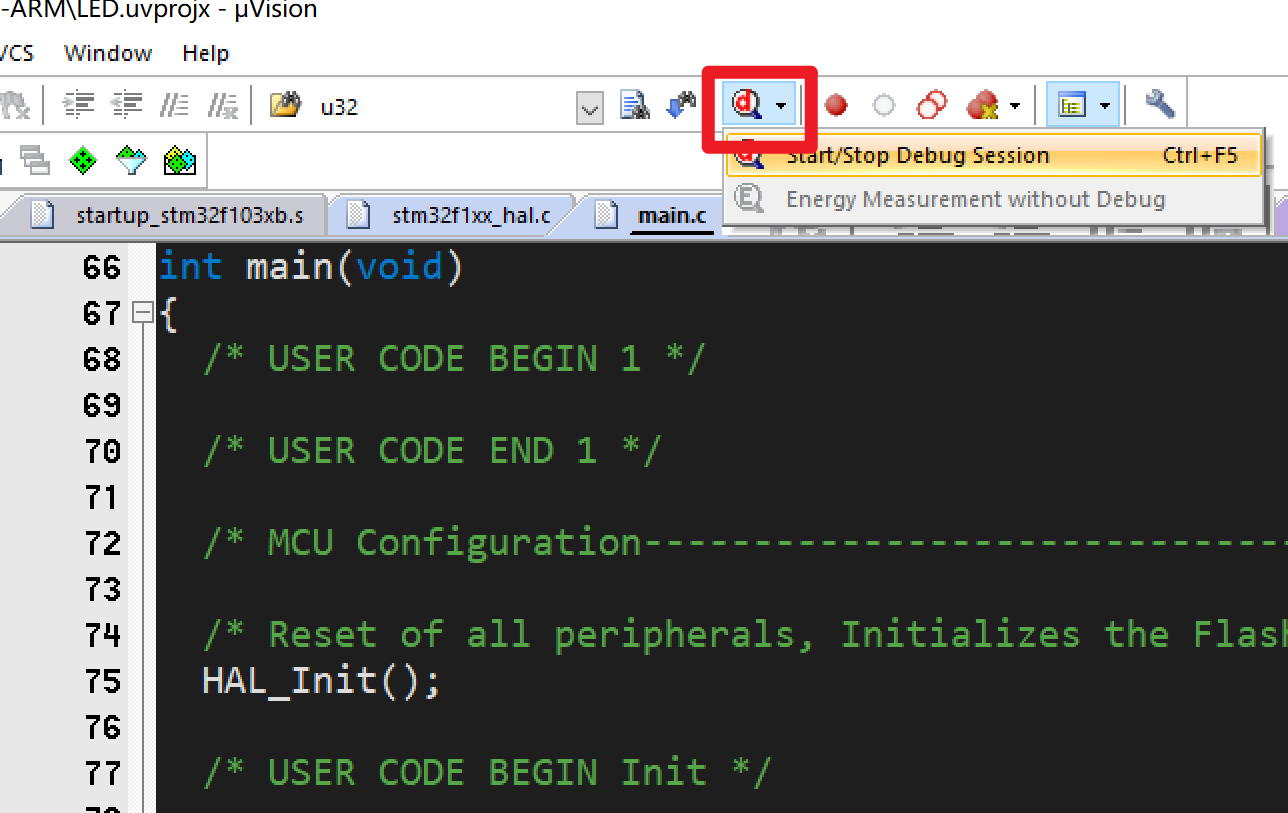
打开逻辑分析仪器
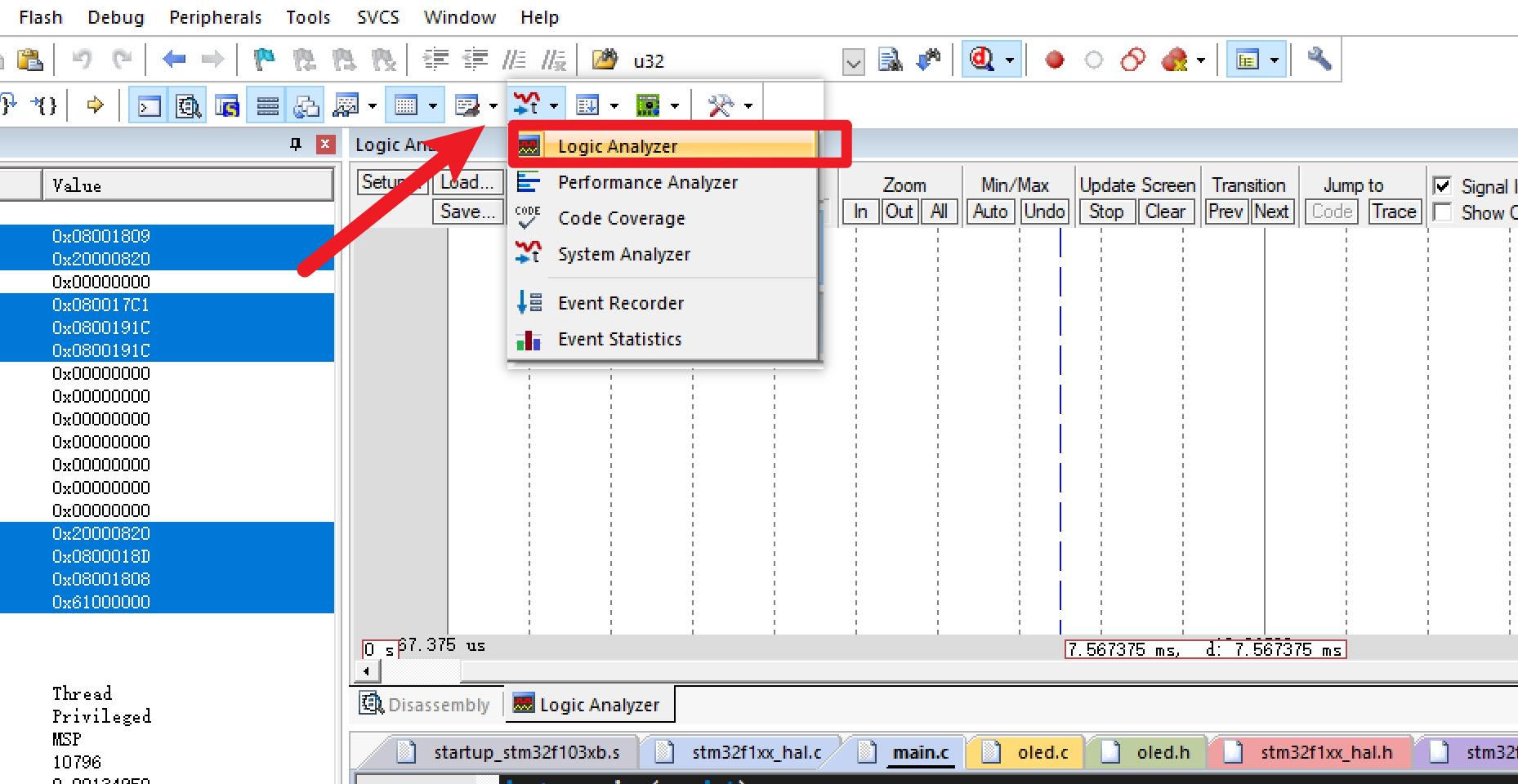
添加要观察的引脚
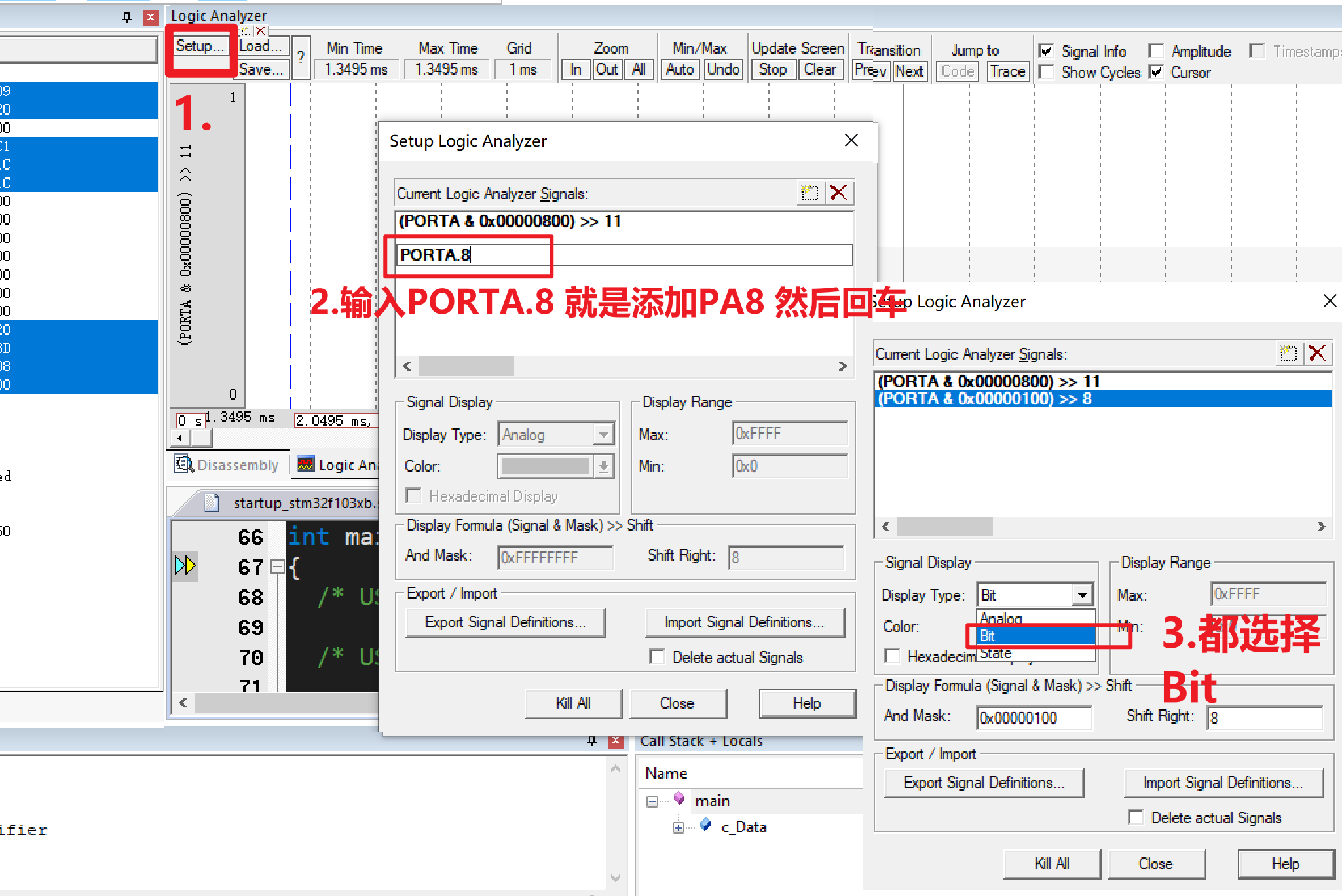
点击全速运行
使用仿真器硬件仿真
选择仿真器仿真-检测已经识别出芯片ID
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-u2b0J6K5-1675083353067)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203144038645.png)]
一样的可以开启仿真
但是硬件仿真好像目前还不能使用过逻辑分析仪、但是硬件仿真是在硬件上跑的,可以向硬件输入数据或者由硬件输出数据、比如按键仿真的时候就可以使用硬件仿真。
使用示波器工具测量波形(非重点)
第六章-电机驱动和PWM
6.1-认识电机驱动
示波器、硬件仿真、软件仿真
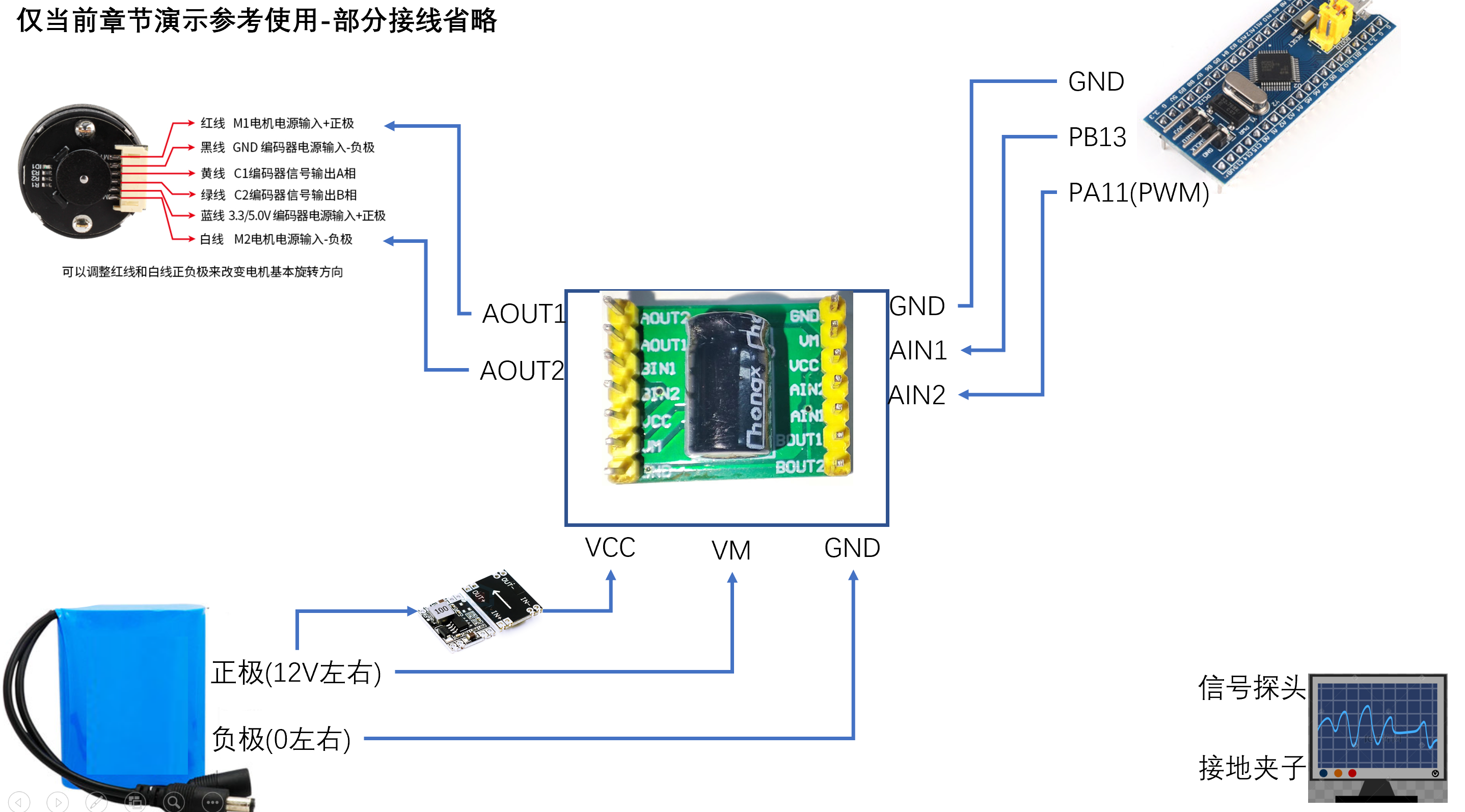
项目使用电机驱动芯片为A4950、下面是电机驱动的相关介绍


我们按照这种使用方法

这我们使用一个图介绍
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-glMQEPmJ-1675083353068)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230101164812094.png)]
6.2-使用电机驱动(独立工程)
分析和编写代码
综合电机使用方法、C8T6单片机硬件资源、小车原理图我们要进行如下配置
PA11-TIM1_CH4 定时器PWM输出-PWMA 前面已经完成
PB13-GPIO输出-AIN1
PA8-TIM1_CH1 定时器PWM输出-PWMB 前面已经完成
PB3-GPIO输出-BIN1

还有两个管脚没有初始化

生成代码
开始添加控制电机正反转与速度的代码,进行仿真和电机测试,示波器测量
添加AIN1、BIN1控制代码
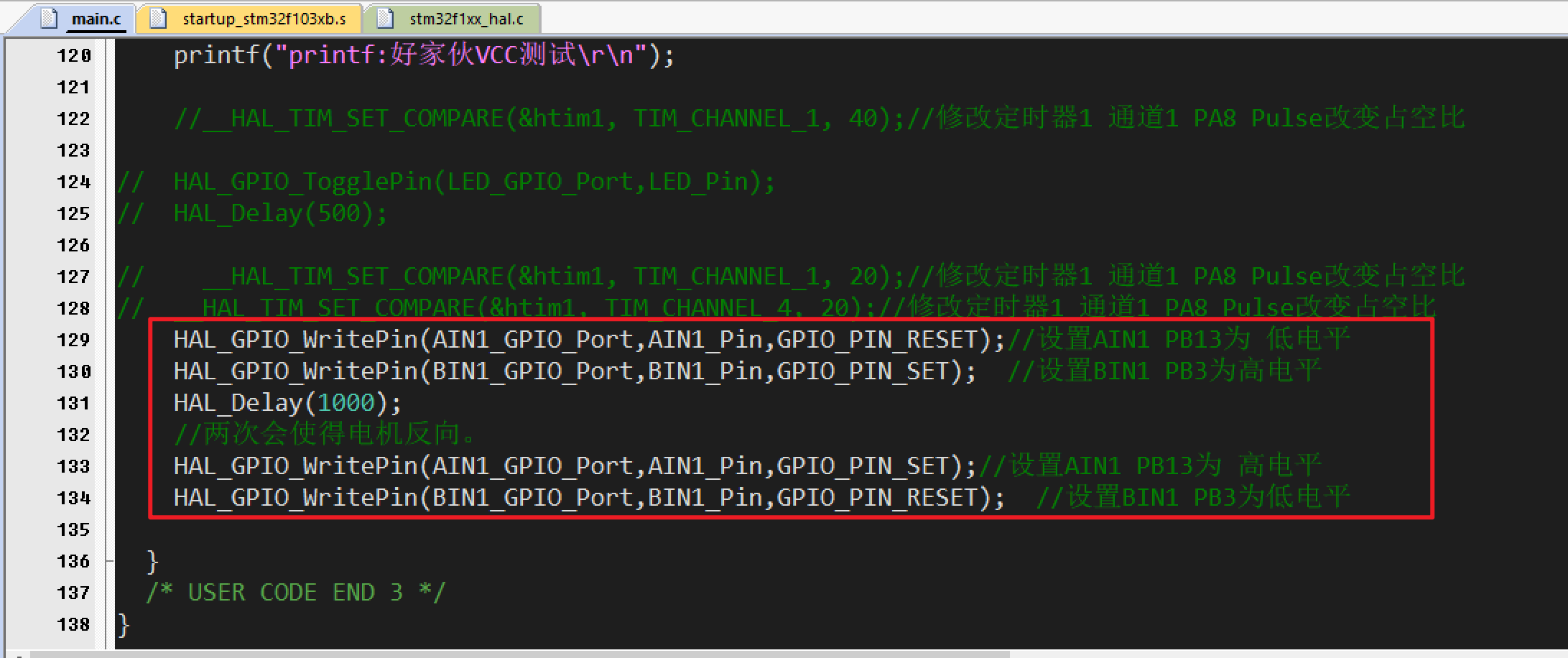
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);//设置AIN1 PB13为 低电平
HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_SET); //设置BIN1 PB3为高电平
HAL_Delay(1000);
//两次会使得电机反向。
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_SET);//设置AIN1 PB13为 高电平
HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET); //设置BIN1 PB3为低电平
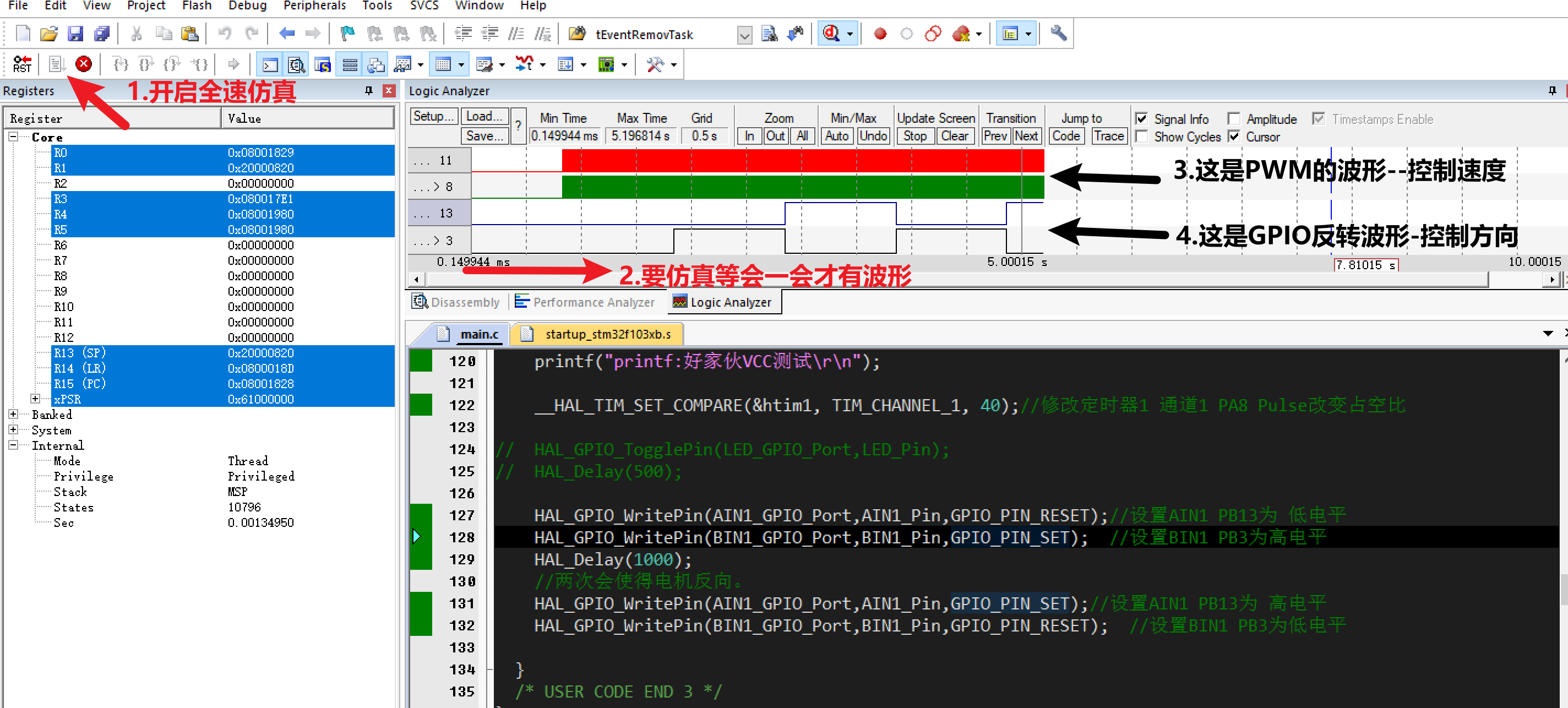
仿真测试代码
使用软件仿真
检测是否软件仿真设置正确
开启仿真-添加PB13和PB3到逻辑分析仪
全速仿真运行
实物测试代码
如何让电机90%电压转速 旋转
烧录代码
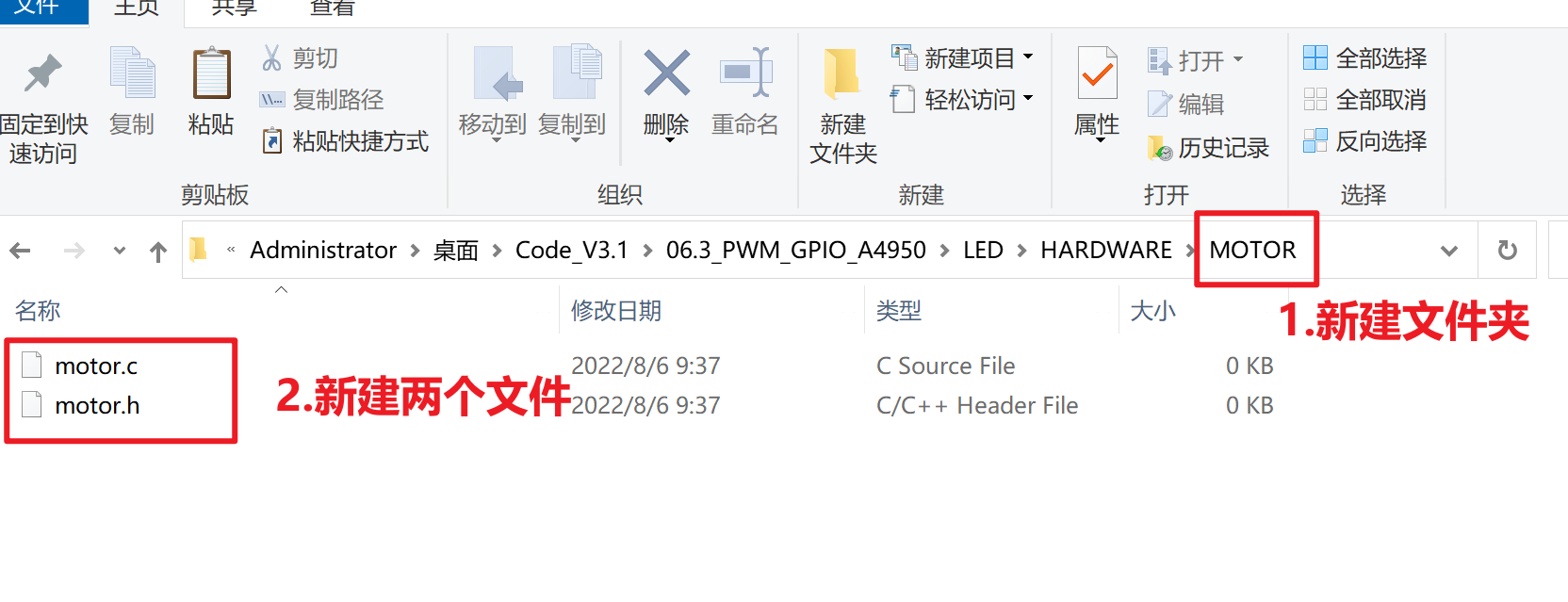
6.3-编写电机转速开环控制函数(另外复制工程)
新建motor文件
包含文件并添加编译
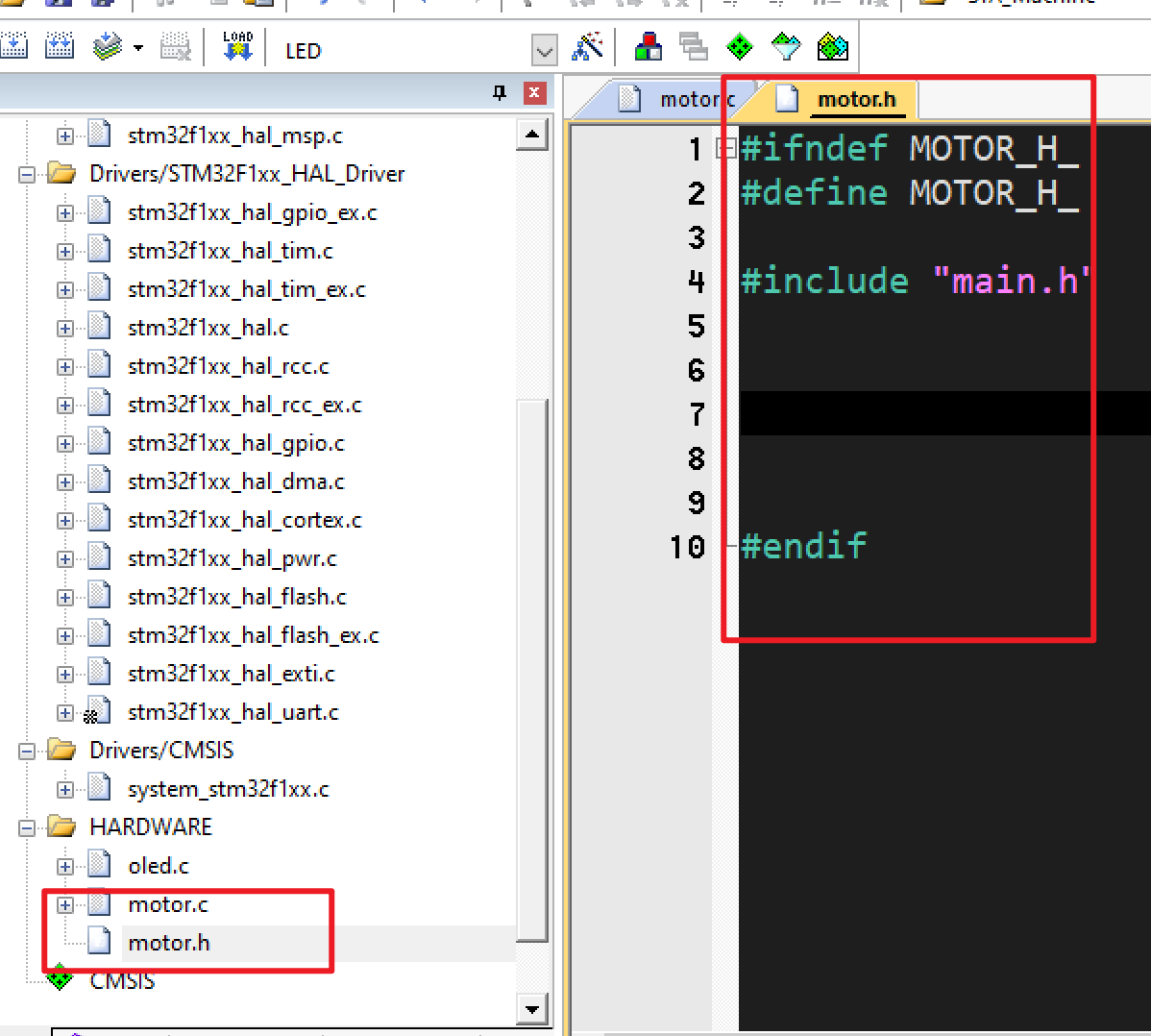
为了方便移植和使用,我们GPIO电平控制写成宏
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VeLB1AXk-1675083353071)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230101150840270.png)]
#define AIN1_RESET HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET)//设置AIN1 PB13为 低电平
#define AIN1_SET HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_SET)//设置AIN1 PB13为 高电平
#define BIN1_RESET HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET) //设置BIN1 PB3为低电平
#define BIN1_SET HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_SET)//设置AIN1 PB13为 高电平
下面我们编写小车电机方向和速度控制
/*******************
* @brief 设置两个电机转速和方向
* @param motor1:电机B设置参数、motor2:设置参数
* @param motor1: 输入1~100 对应控制B电机正方向速度在1%-100%、输入-1~-100 对应控制B电机反方向速度在1%-100%、motor2同理
* @return 无
*
*******************/
void Motor_Set (int motor1,int motor2)
{
//根据参数正负 设置选择方向
if(motor1 < 0) BIN1_SET;
else BIN1_RESET;
if(motor2 < 0) AIN1_SET;
else AIN1_RESET;
//motor1 设置电机B的转速
if(motor1 < 0)
{
if(motor1 < -99) motor1 = -99;//超过PWM幅值
//负的时候绝对值越小 PWM占空比越大
//现在的motor1 -1 -99
//给寄存器或者函数 99 1
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (100+motor1));//修改定时器1 通道1 PA8 Pulse改变占空比
}
else{
if(motor1 > 99) motor1 = 99;
//现在是 0 1 99
//我们赋值 0 1 99
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, motor1);//修改定时器1 通道1 PA8 Pulse改变占空比
}
//motor2 设置电机A的转速
if(motor2 < 0)
{
if(motor2 < -99) motor2 = -99;//超过PWM幅值
//负的时候绝对值越小 PWM占空比越大
//现在的motor2 -1 -99
//给寄存器或者函数 99 1
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, (100+motor2));//修改定时器1 通道4 PA11 Pulse改变占空比
}
else{
if(motor2 > 99) motor2 = 99;
//现在是 0 1 99
//我们赋值 0 1 99
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, motor2);//修改定时器1 通道4 PA11 Pulse改变占空比
}
}
然后我们连接电机主函数进行测试
HAL_Delay(500);
Motor_Set(0,0);
第七章-编码器测速
7.1-认识编码器
编码器:一般按照电机尾部、用于测量电机转速、方向、位置。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-151sF0Du-1675083353071)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102003312991.png)]
那么编码器的输出信号具体是什么?我们如何根据输出信号测量转速 和方向?
转速: 单位时间测量到的脉冲数量(比如根据每秒测量到多少个脉冲来计算转速)
旋转方向: 两通道信号的相对电平关系

7.2单片机定时器的编码器功能
那么我们已经知道编码器输出的波形,我们如何通过单片机读取波形,然后计算出速度那?
这里STM32单片机的定时器和通用定时器具有编码器接口模式、在STM32中文参考手册13章中有详细介绍
STM32中文参考手册-第200页

STM32中文参考手册-第267页

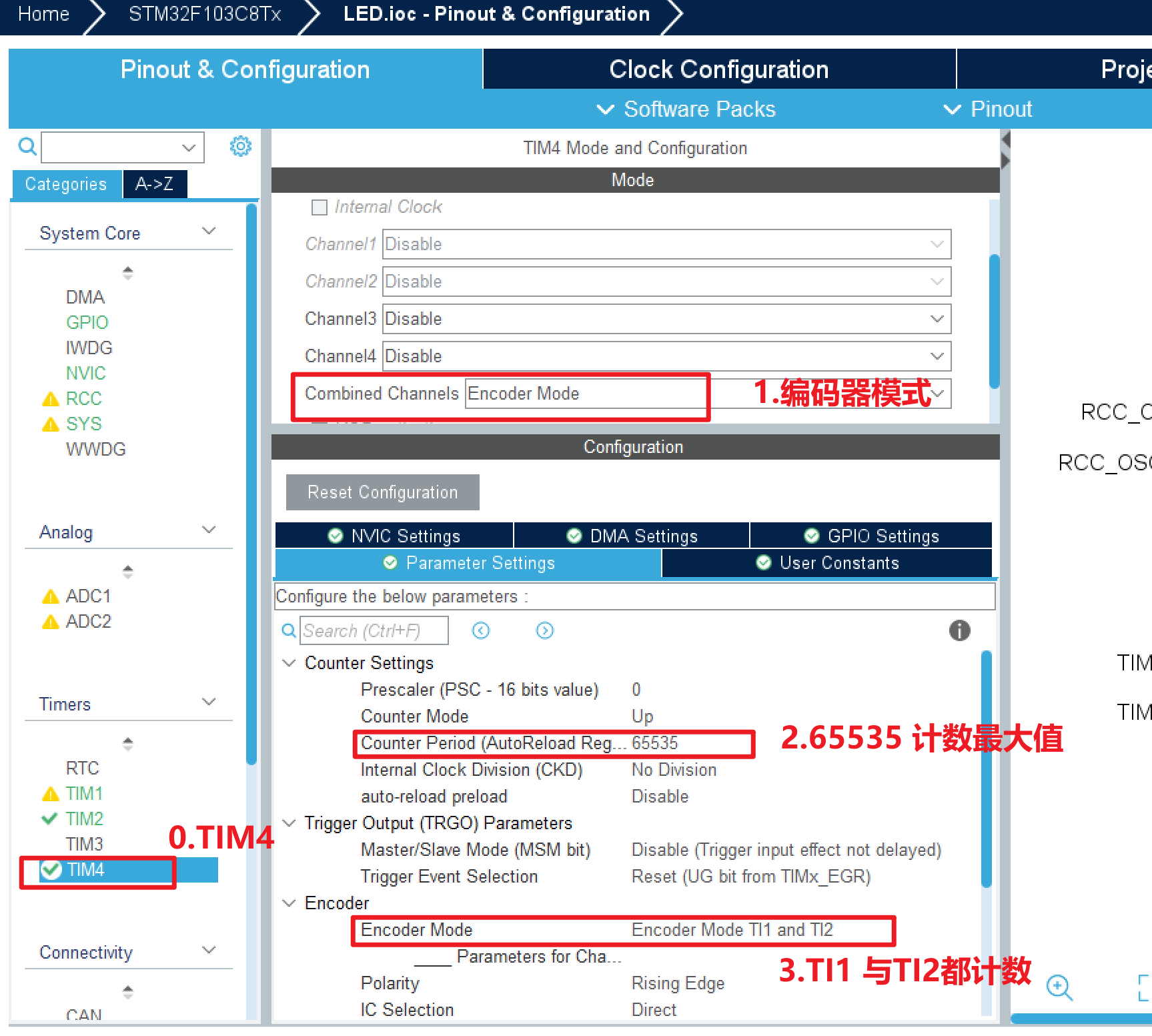
STM32中文参考手册-第226页

这个是计数方向与编码器信号的关系、我们拆开来看
仅在TI1计数、电机正转、对原始数据二倍频

仅在TI1计数、电机反转、对原始数据二倍频

在TI1和TI2都计数
可以看到这样就对原始数据四倍频了

计数方向

7.3-获得单位时间计数器值变化量
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oMS4AfFe-1675083353072)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103004459822.png)]
上一次说的方法:
这次编码器计数值 = 计数器值+计数溢出次数 * 计数最大器计数最大值
计数器两次变化值 = 这次编码器计数值 - 上次编码器计数值
然后根据这个单位变化量计算速度
还有一种方法:
计数器变化量 = 当前计数器值
每次计数值清空
然后根据这个变化量 计算速度
然后我们再看具体到哪一款电机和编码器上如何测速
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bDPUA6wi-1675083353072)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102161121087.png)]
在STM32中文参考手册-第119页
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3FEZjGvN-1675083353073)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102235948243.png)]
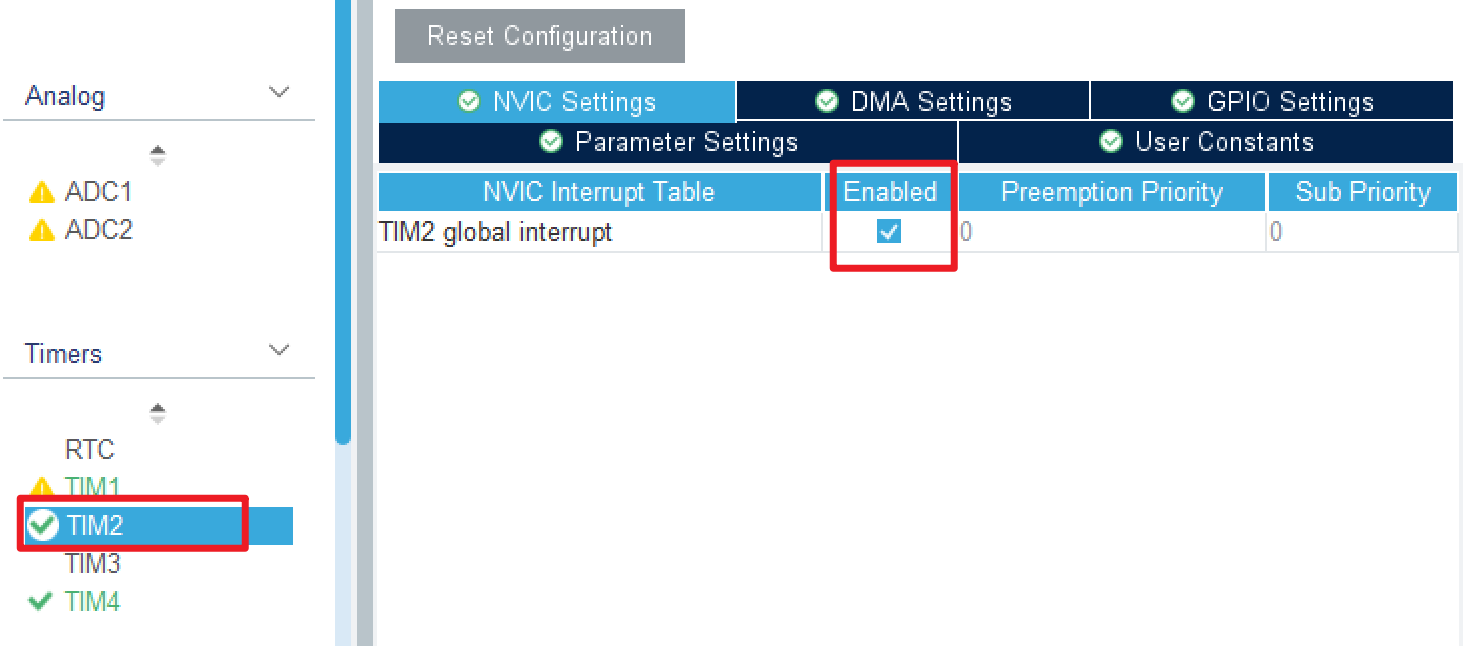
设置TIM2
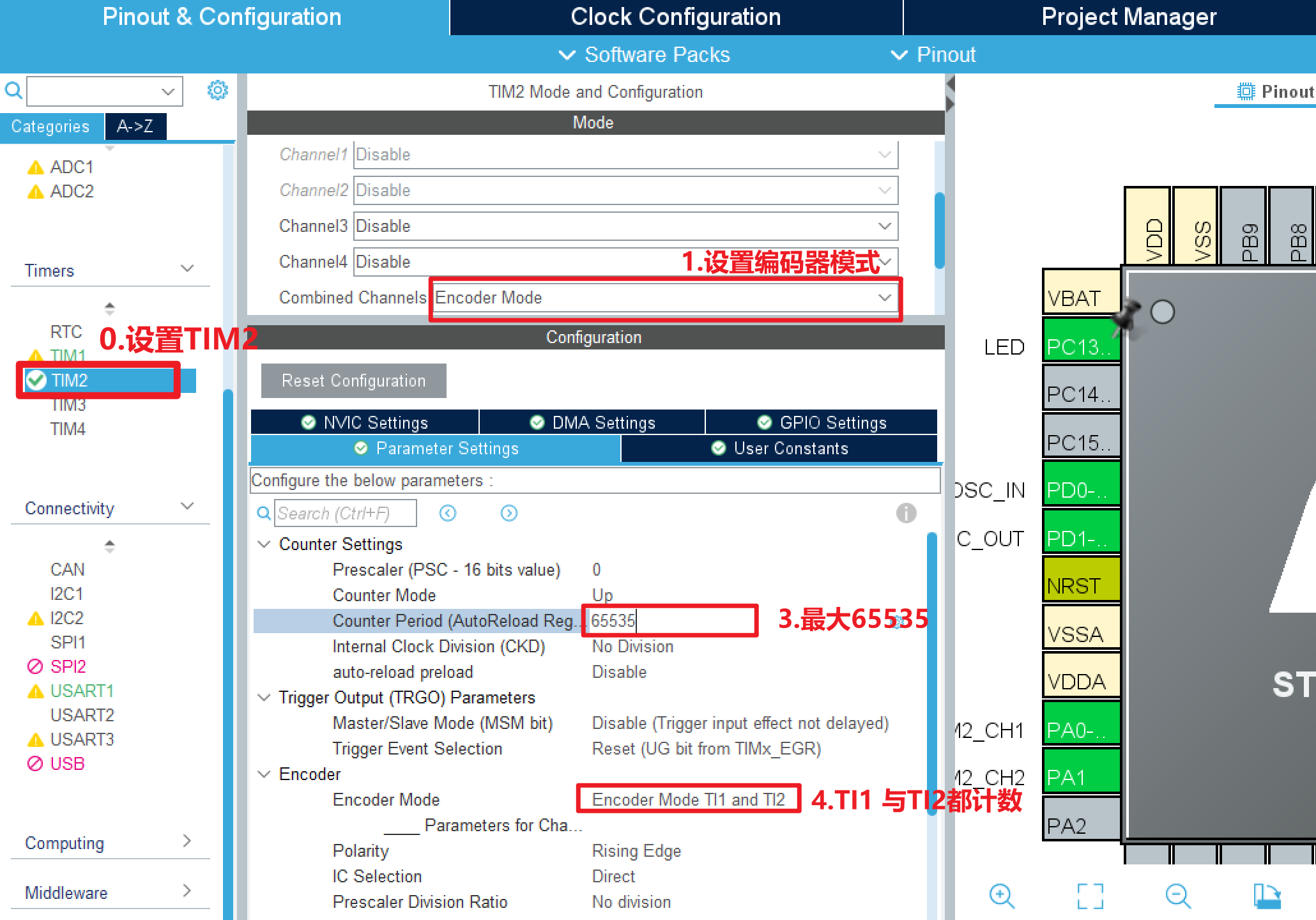
设置ITM2滤波器
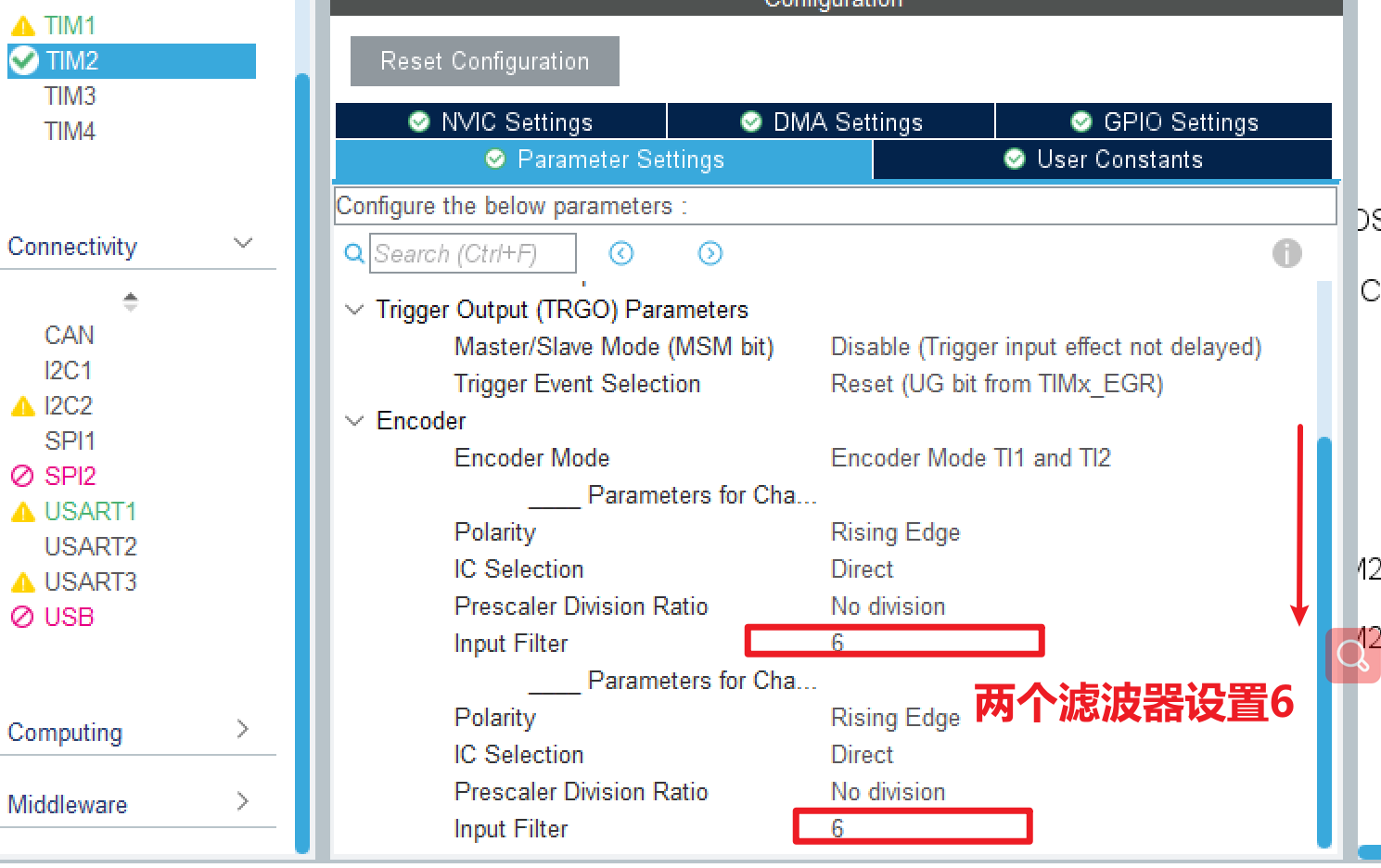
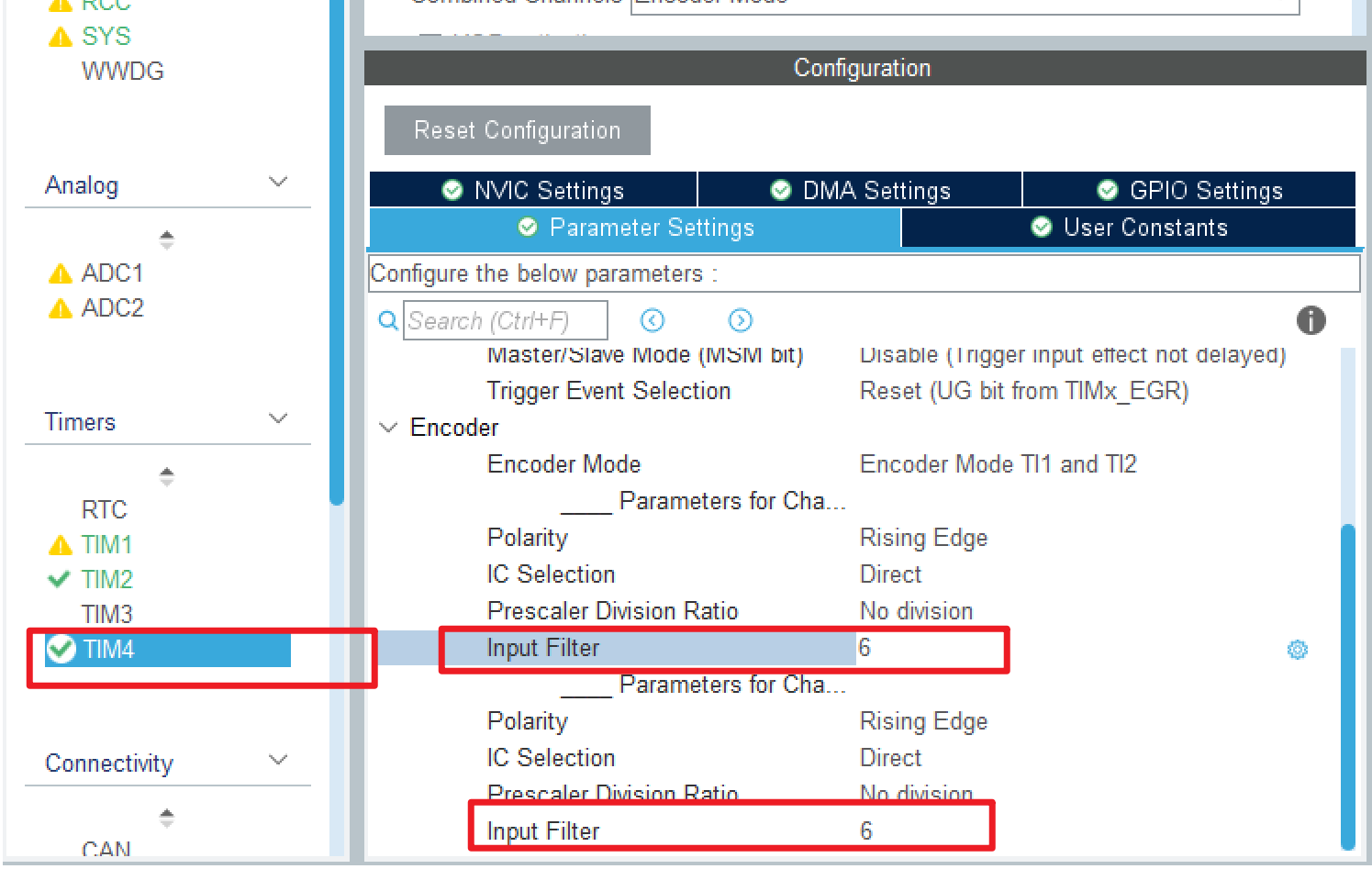
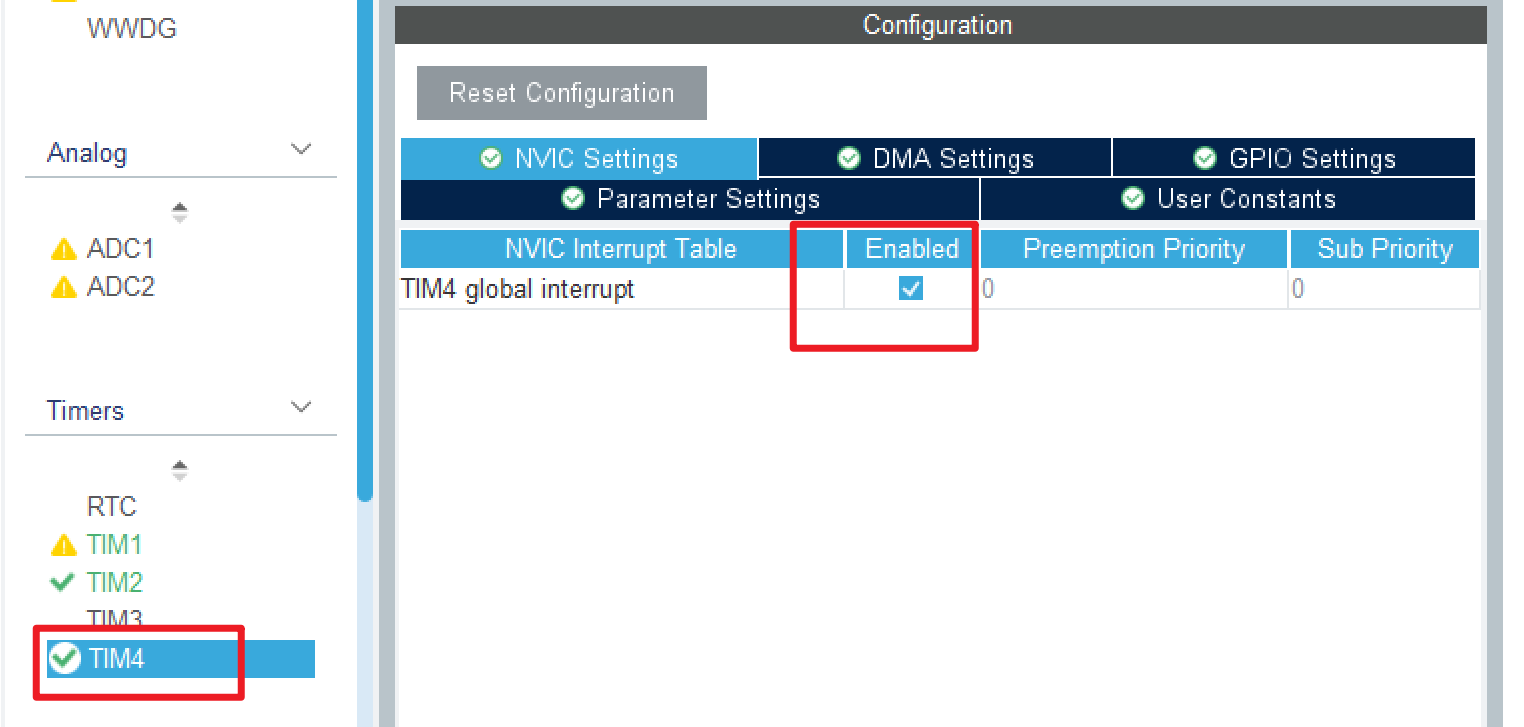
同理设置TIM4
设置TIM4滤波器
设置引脚上拉
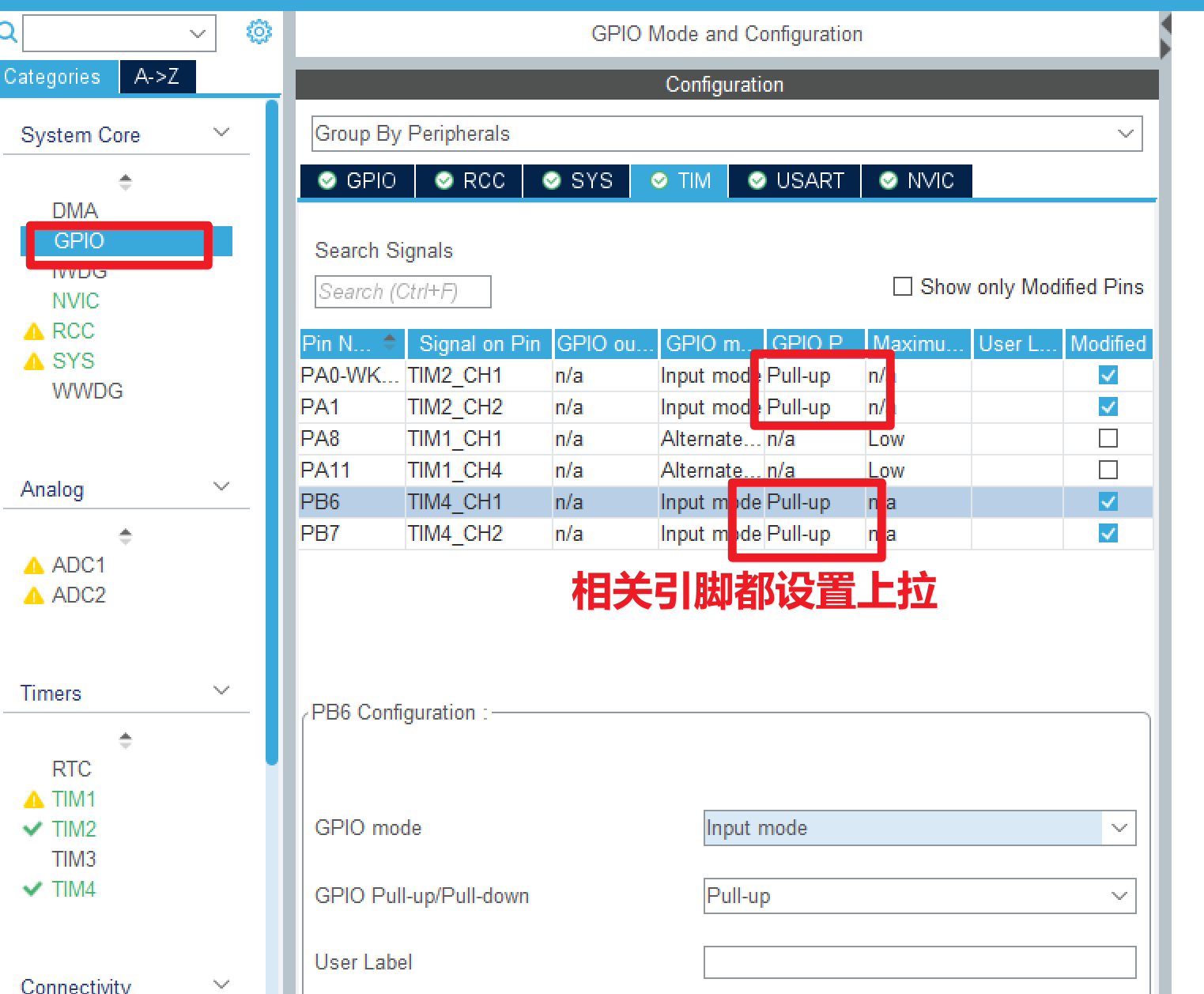
生成代码
开启定时器和定时中断
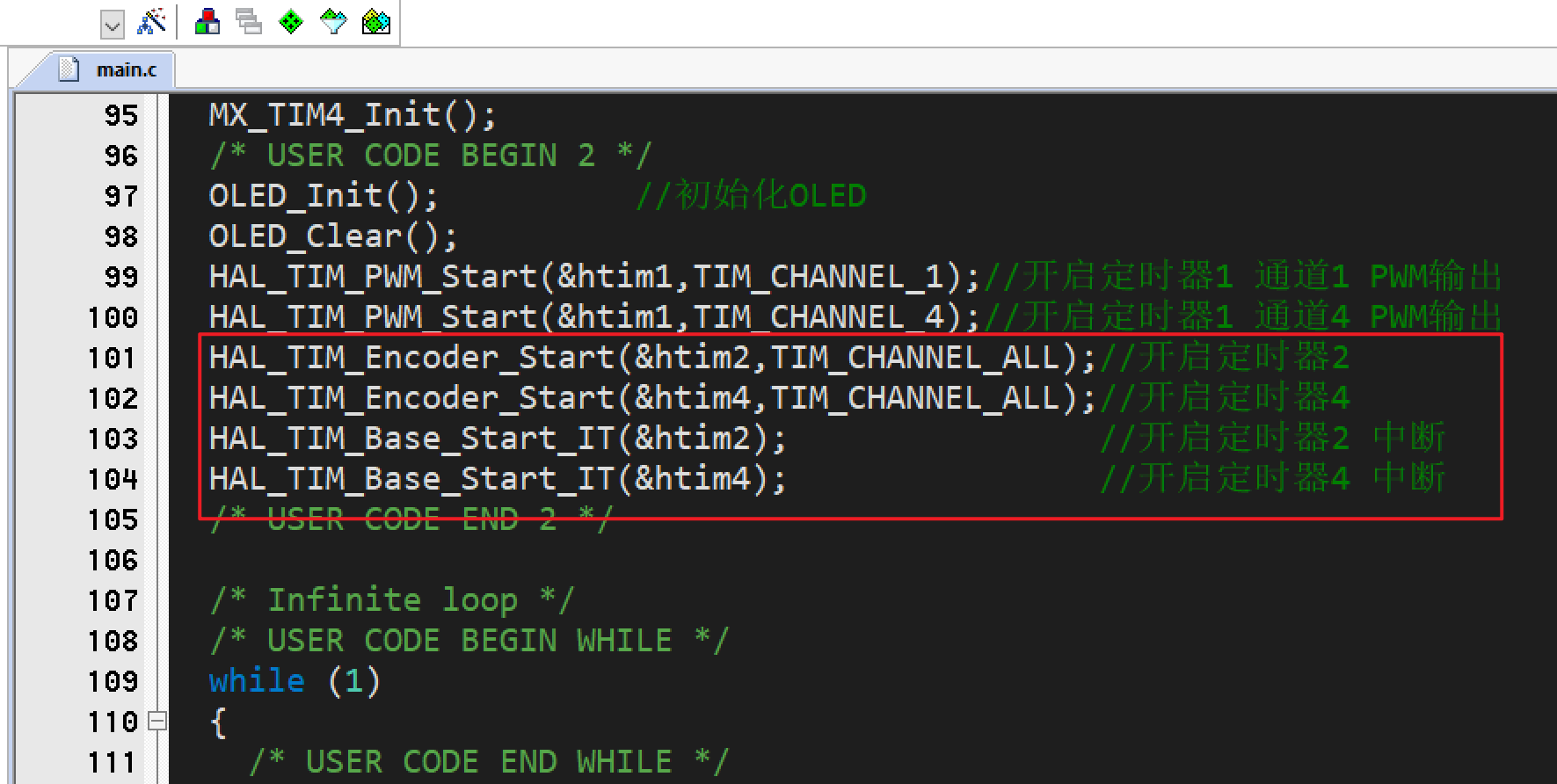
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL);//开启定时器2
HAL_TIM_Encoder_Start(&htim4,TIM_CHANNEL_ALL);//开启定时器4
HAL_TIM_Base_Start_IT(&htim2); //开启定时器2 中断
HAL_TIM_Base_Start_IT(&htim4); //开启定时器4 中断
在定义两个变量保存计数器值
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4VkeuNKo-1675083353075)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102225054673.png)]
short Encoder1Count = 0;//编码器计数器值
short Encoder2Count = 0;
每2ms读取计数器值->清零计数器
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-OIsKQhTE-1675083353076)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102231545491.png)]
Motor_Set(0,0);
//1.保存计数器值
Encoder1Count =(short)__HAL_TIM_GET_COUNTER(&htim4);
Encoder2Count =(short)__HAL_TIM_GET_COUNTER(&htim2);
//2.清零计数器值
__HAL_TIM_SET_COUNTER(&htim4,0);
__HAL_TIM_SET_COUNTER(&htim2,0);
printf("Encoder1Count:%d\r\n",Encoder1Count);
printf("Encoder2Count:%d\r\n",Encoder2Count);
HAL_Delay(2);
接好电池、烧录代码、串口一连接电脑
用手转动电机1或者电机2 、串口助手可以看到输出信息了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XMBEeUKF-1675083353076)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102232135472.png)]
7.4-主函数周期测量转速
上面我们测量出来了溢出值,我们再根据当前计数器值就可以测量出计数器变化量,我们通过单位时间变量就可以计算出转速
下面是电机和编码器的参数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eZuuxSac-1675083353076)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230102161121087.png)]
我们先测试的结论是否有问题?
- 编码器计数器会不会在计数时间内溢出?
- 车轮旋转一周,单片机编码器计数器计数多少?9.6乘11乘4
- 根据计算方法计算电机转速
定义两个float变量
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JrPGY14p-1675083353076)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103140008234.png)]
float Motor1Speed = 0.00;
float Motor2Speed = 0.00;
下面是代码(一定要把主函数没有用的删除掉)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tkxa2XaI-1675083353077)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103140050045.png)]
//计算速度
Motor1Speed = (float)Encode1Count*100/9.6/11/4;
Motor2Speed = (float)Encode2Count*100/9.6/11/4;
printf("Motor1Speed:%.2f\r\n",Motor1Speed);
printf("Motor2Speed:%.2f\r\n",Motor2Speed);
编译烧录代码就会输出结果
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-btHVNFbq-1675083353077)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103140447001.png)]
7.5-定时器中断定时测量速度
上面我们实现:在主函数周期,读取计数器值然后计算速度,但是如果函数加入其他内容这个周期时间就很难保证。
所以这节我们通过定时器,周期读取计数器,计算速度。复制一份工程开始搞!
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rEMAWOUd-1675083353077)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103153710421.png)]
我们先开启定时器、2ms进入一次定时器中断,中断回调函数执行咱们的代码即可。
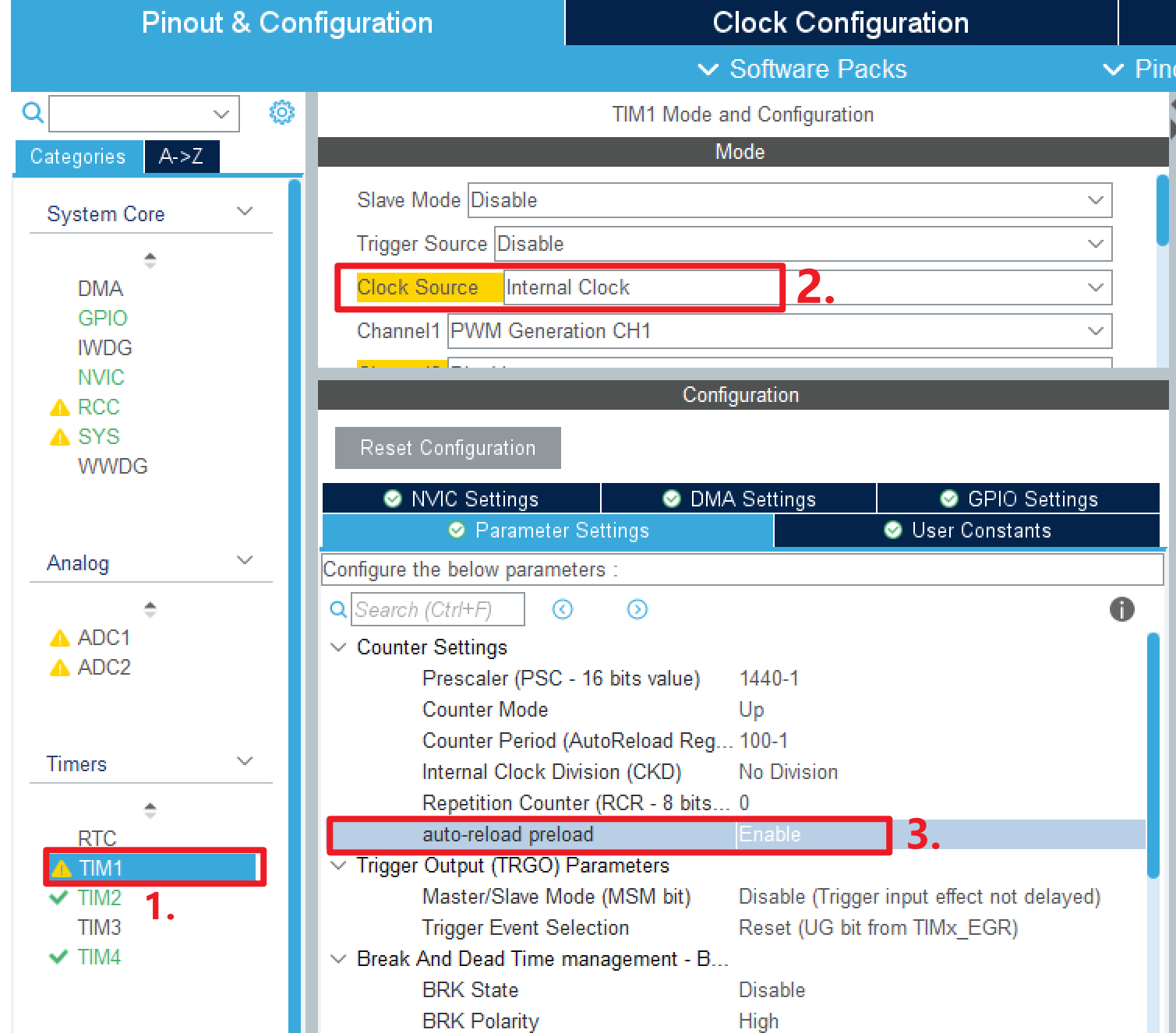
为什么充分利用单片机 我们使用TIM1
- 设置内部时钟源
- 使能自动重装载
开启定义更新中断
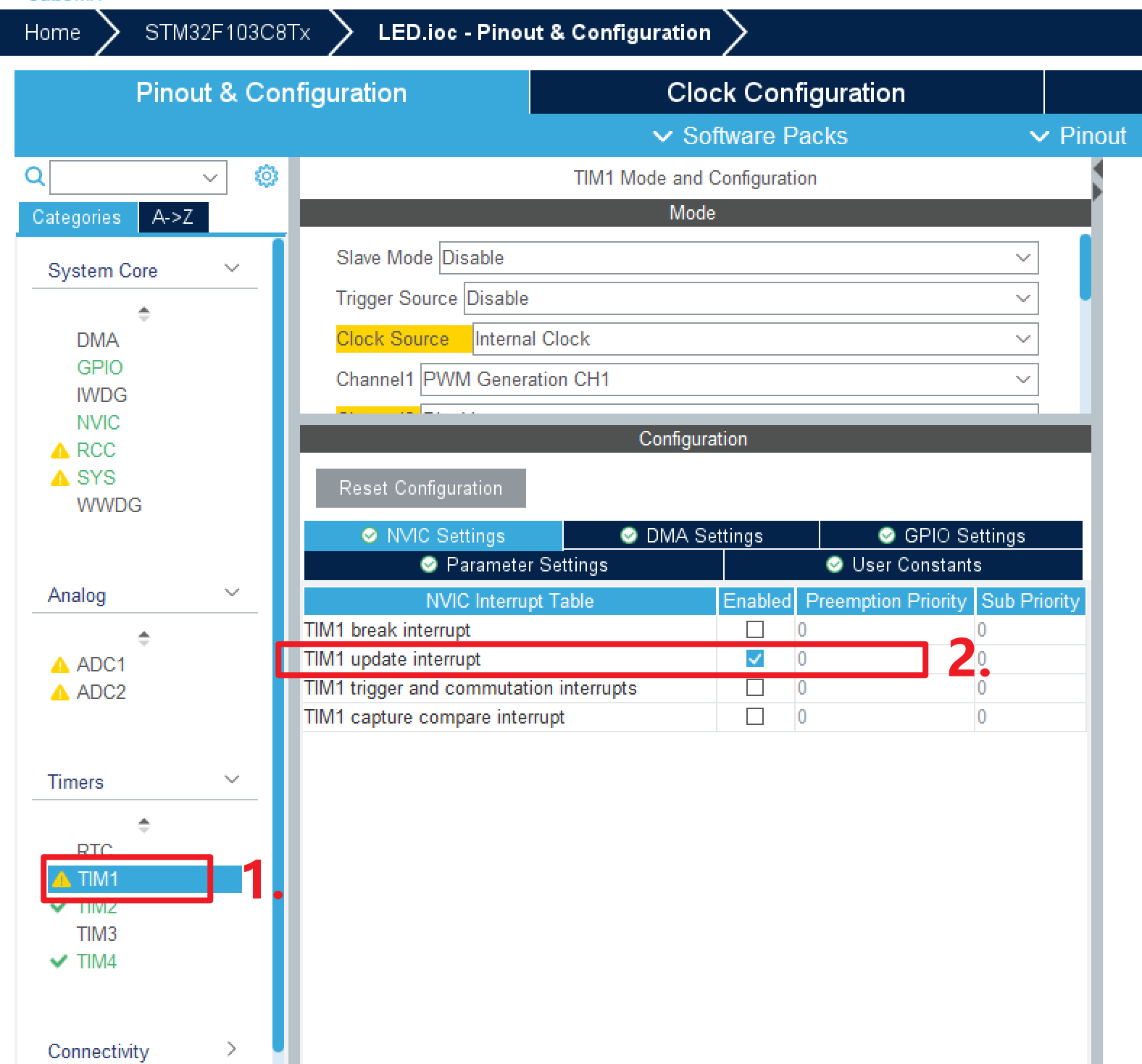
代码开启定时器1 中断
HAL_TIM_Base_Start_IT(&htim1); //开启定时器1 中断
定时器回调函数中添加 速度计算内容
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-EQNLqBD7-1675083353079)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103151934131.png)]
/*******************
* @brief 定时器回调函数
* @param
* @return
*
*******************/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)//htim1 500HZ 2ms 中断一次
{
TimerCount++;
if(TimerCount %5 == 0)//每10ms执行一次
{
Encode1Count = (short)__HAL_TIM_GET_COUNTER(&htim4);
Encode2Count = (short)__HAL_TIM_GET_COUNTER(&htim2);
__HAL_TIM_SET_COUNTER(&htim4,0);
__HAL_TIM_SET_COUNTER(&htim2,0);
Motor1Speed = (float)Encode1Count*100/9.6/11/4;
Motor2Speed = (float)Encode2Count*100/9.6/11/4;
TimerCount=0;
}
}
}
把之前的变量定义放这里
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dguIW6Lm-1675083353079)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103152057663.png)]
short Encode1Count = 0;
short Encode2Count = 0;
float Motor1Speed = 0.00;
float Motor2Speed = 0.00;
uint16_t TimerCount=0;
主函数就输出速度大小就可以了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XIU2aQxi-1675083353079)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103152344746.png)]
printf("Motor1Speed:%.2f\r\n",Motor1Speed);
printf("Motor2Speed:%.2f\r\n",Motor2Speed);
把变量需要声明一下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UNYaknvA-1675083353079)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103152521123.png)]
extern float Motor1Speed ;
extern float Motor2Speed ;
然后打开串口助手
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iUlIJ8LF-1675083353080)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103152735931.png)]
注:
根据电机和实际小车调整速度测量与占空比设置函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ts9mcbQl-1675083353080)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103160108176.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BfPtyrok-1675083353080)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103160133008.png)]
第八章-PID-速度控制
8.1-速度控制探索
前面我们已经能够通过编码器测量出速度值,下面我们来控制速度
我们先编写一个简单的控制方法
要求:讲转速控制再2.9-3.1转每秒
可以把中断里面不重要的输出注释掉
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tStx3Tbh-1675083353081)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103163851923.png)]
if(Motor1Speed>3.1) Motor1Pwm--;
if(Motor1Speed<2.9) Motor1Pwm++;
if(Motor2Speed>3.1) Motor2Pwm--;
if(Motor2Speed<2.9) Motor2Pwm++;
Motor_Set(Motor1Pwm,Motor2Pwm);
printf("Motor1Speed:%.2f Motor1Pwm:%d\r\n",Motor1Speed,Motor1Pwm);
printf("Motor2Speed:%.2f Motor2Pwm:%d\r\n",Motor2Speed,Motor2Pwm);
HAL_Delay(100);
开始实验
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xtmxeShW-1675083353081)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103164021564.png)]
现象就开始电机没有到达3转每秒,PWM占空比逐渐增大,电机逐渐达到要求转速、到达要求转速后我们增加阻力,电机变慢,阻力大小不边PWM占空比逐渐更大转速逐渐更大。
这样我们就把转速控制到我们想要的范围,但是我们并不满意、能够看出来控制的速度很慢,给电机一些阻力电机至少要2-3秒能够调整过来,这在一些场景是不允许的。
我们理想的控制效果是:在电机转速很慢的是时候能快速调整,在电机一直转的不能达到要求时候能够更快速度调整
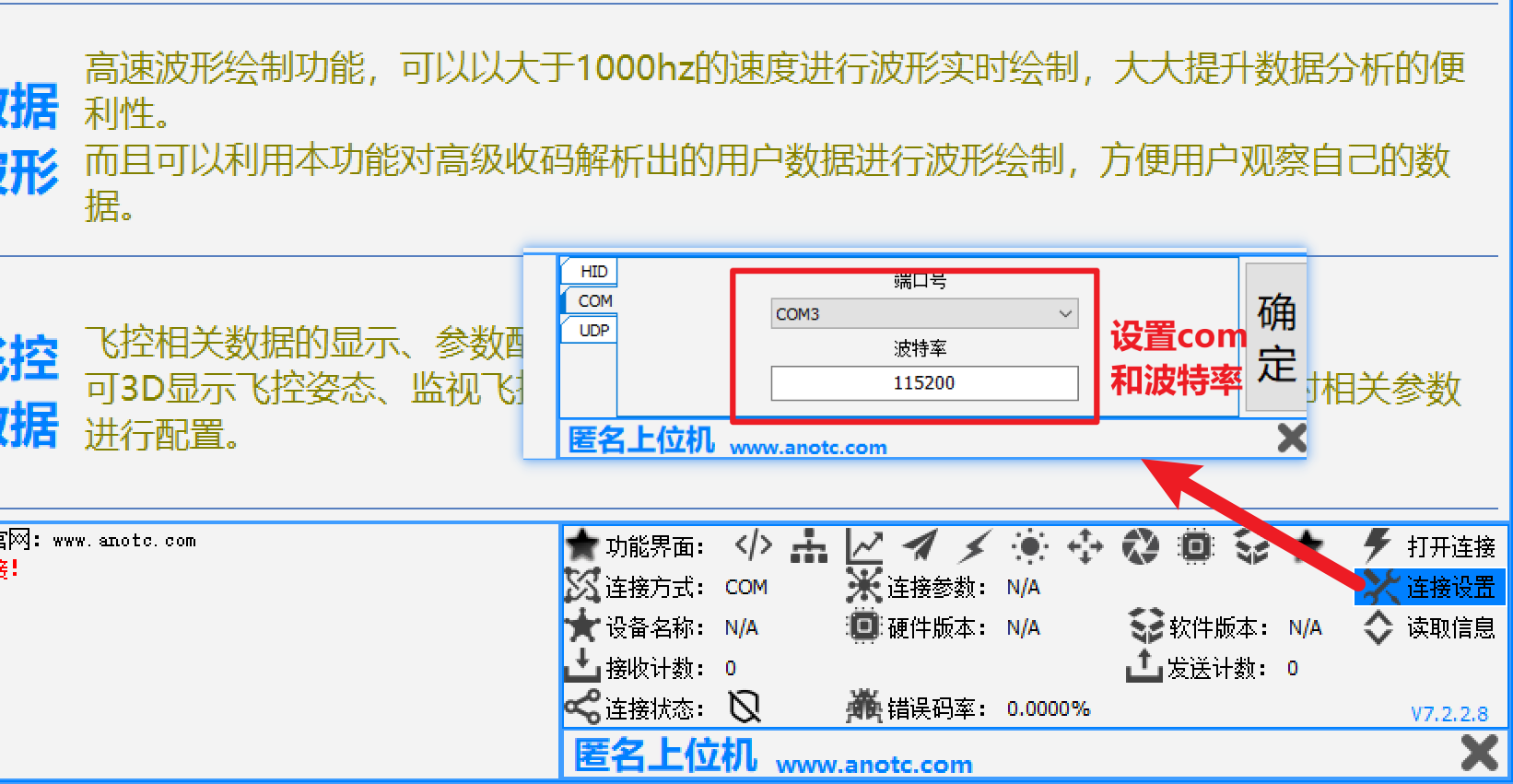
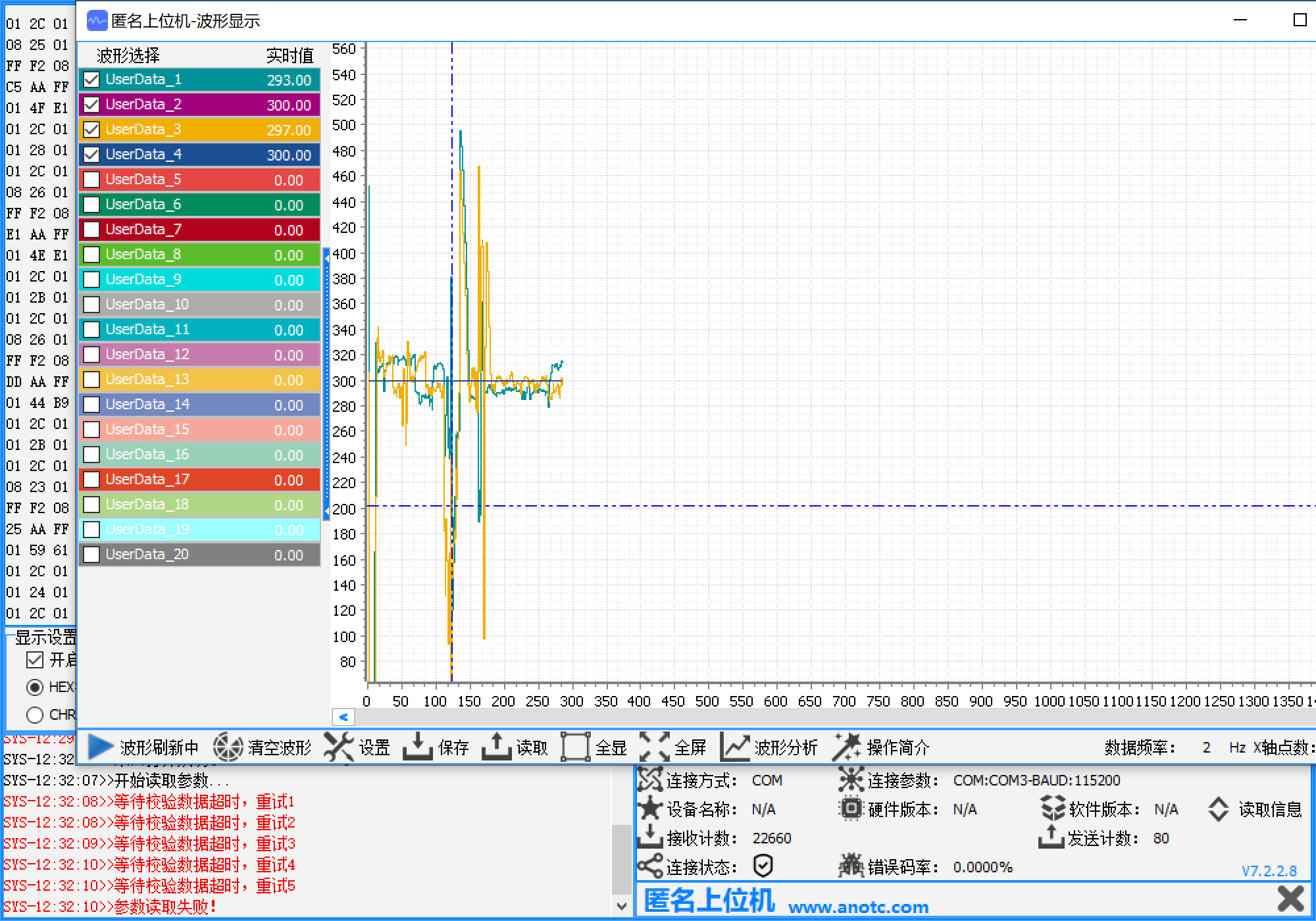
8.2-准备工作-匿名上位机曲线显示速度波形方便观察数据
为了方便观察电机速度数据,我们通过上位机曲线显示一下。
这里我们使用的上位机是匿名上位机-大佬写的非常稳定功能也很多
我使用的版本是:匿名上位机V7.2.2.8版本推荐大家和我使用一样
匿名上位机官方下载链接:http://www.anotc.com/wiki/%E5%8C%BF%E5%90%8D%E4%BA%A7%E5%93%81%E8%B5%84%E6%96%99/%E8%B5%84%E6%96%99%E4%B8%8B%E8%BD%BD%E9%93%BE%E6%8E%A5%E6%B1%87%E6%80%BB

我们要把STM32数据发送到匿名上位机,就要满足匿名上位机的数据协议要求
在匿名上位机资料下载链接,可以下载到协议介绍
- 匿名上位机V7通信协议,20210528发布:https://pan.baidu.com/s/1nGrIGWj6qr9DWOcGpKR51g 提取码:z8d1
- CSDN 慕羽★大佬写的协议解析教程博客:https://blog.csdn.net/qq_44339029/article/details/106004997
1.先补充一下大小端模式
这是因为在计算机系统中,我们是以字节为单位的,每个地址单元都对应着一个字节,一个字节为 8bit。但是在C语言中除了8bit的char之外,还有16bit的short型,32bit的long型(要看具体的编译器),另外,对于位数大于8位的处理器,例如16位或者32位的处理器,由于寄存器宽度大于一个字节,那么必然存在着一个如和将多个字节安排的问题。因此就导致了大端存储模式和小端存储模式。例如一个16bit的short型x,在内存中的地址为0x0010,x的值为0x1122,那么0x11为高字节,0x22为低字节。对于大端模式,就将0x11放在低地址中,即0x0010中,0x22放在高地址中,即0x0011中。
-
所谓的大端模式(BE big-endian),是指数据的低位保存在内存的高地址中,而数据的高位,保存在内存的低地址中(低对高,高对低);
-
所谓的小端模式(LE little-endian),是指数据的低位保存在内存的低地址中,而数据的高位保存在内存的高地址中(低对低,高对高)。
常见的单片机大小端模式:(1)KEIL C51中,变量都是大端模式的,而KEIL MDK中,变量是小端模式的。(2)SDCC-C51是小端寻址,AVRGCC 小端寻址.(3)PC小端,大部分ARM是小端 (4)总起来说51单片机一般是大端模式,32单片机一般是小端模式.
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nEcYKf6g-1675083353081)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103211719535.png)]
2.看一下上位机要求的协议

灵活格式帧(用户自定义帧)

前面我们好理解
0xAA:一个字节表示开始
0xFF:一个字节表示目标地址
0xF1:一个字节表示发送功能码
1-40:一个字节表示数据长度
数据内容有多个字节如何发送
因为串口每次发送一个字节,但是数据可能是int16_t 16位的数据,或者int32_t 32位数据,每次发送16位数据,先发送数据低八位,还是先发送数据高八位那?
匿名协议通信介绍给出:DATA 数据内容中的数据,采用小端模式传送,低字节在前,高字节在后。
那么就要求,比如我们在发送16位数据0x2314我们要先发送低字节0x14,然后发送高字节0x23
那么如何解析出低字节或者高字节,就需要知道多字节数据在单片机里面是怎么存的,因为STM32是小端存储,所以低字节就在低位地址中,高字节高位地址中。
如果使用32单片机 小端模式,0x23高地址,0x14在低地址,所以我们要先发低地址,再发高地址。
下面就是对16位数据,或者32位数据的拆分
//需要发送16位,32位数据,对数据拆分,之后每次发送单个字节
//拆分过程:对变量dwTemp 去地址然后将其转化成char类型指针,最后再取出指针所指向的内容
#define BYTE0(dwTemp) (*(char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
拆分后我们按照协议要求发送数据就可以了
niming.c
#include "niming.h"
#include "main.h"
#include "usart.h"
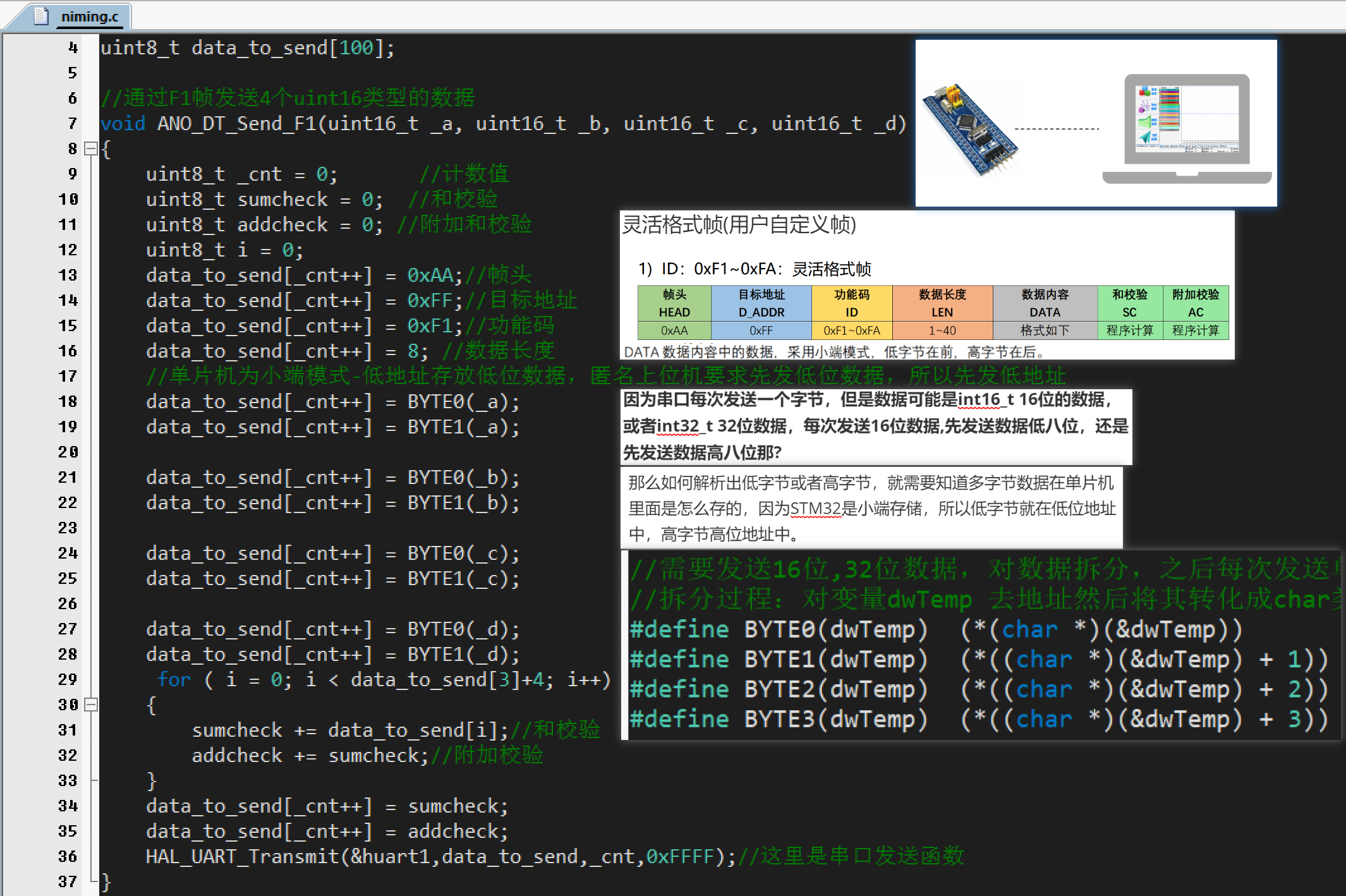
uint8_t data_to_send[100];
//通过F1帧发送4个uint16类型的数据
void ANO_DT_Send_F1(uint16_t _a, uint16_t _b, uint16_t _c, uint16_t _d)
{
uint8_t _cnt = 0; //计数值
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i = 0;
data_to_send[_cnt++] = 0xAA;//帧头
data_to_send[_cnt++] = 0xFF;//目标地址
data_to_send[_cnt++] = 0xF1;//功能码
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];//和校验
addcheck += sumcheck;//附加校验
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
//,通过F2帧发送4个int16类型的数据
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d) //F2帧 4个 int16 参数
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF2;
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE0(_d);
data_to_send[_cnt++] = BYTE1(_d);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
//通过F3帧发送2个int16类型和1个int32类型的数据
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c ) //F3帧 2个 int16 参数 1个 int32 参数
{
uint8_t _cnt = 0;
uint8_t sumcheck = 0; //和校验
uint8_t addcheck = 0; //附加和校验
uint8_t i=0;
data_to_send[_cnt++] = 0xAA;
data_to_send[_cnt++] = 0xFF;
data_to_send[_cnt++] = 0xF3;
data_to_send[_cnt++] = 8; //数据长度
//单片机为小端模式-低地址存放低位数据,匿名上位机要求先发低位数据,所以先发低地址
data_to_send[_cnt++] = BYTE0(_a);
data_to_send[_cnt++] = BYTE1(_a);
data_to_send[_cnt++] = BYTE0(_b);
data_to_send[_cnt++] = BYTE1(_b);
data_to_send[_cnt++] = BYTE0(_c);
data_to_send[_cnt++] = BYTE1(_c);
data_to_send[_cnt++] = BYTE2(_c);
data_to_send[_cnt++] = BYTE3(_c);
for ( i = 0; i < data_to_send[3]+4; i++)
{
sumcheck += data_to_send[i];
addcheck += sumcheck;
}
data_to_send[_cnt++] = sumcheck;
data_to_send[_cnt++] = addcheck;
HAL_UART_Transmit(&huart1,data_to_send,_cnt,0xFFFF);//这里是串口发送函数
}
niming.h
#ifndef NIMING_H
#define NIMING_H
#include "main.h"
//需要发送16位,32位数据,对数据拆分,之后每次发送单个字节
//拆分过程:对变量dwTemp 去地址然后将其转化成char类型指针,最后再取出指针所指向的内容
#define BYTE0(dwTemp) (*(char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
void ANO_DT_Send_F1(uint16_t, uint16_t _b, uint16_t _c, uint16_t _d);
void ANO_DT_Send_F2(int16_t _a, int16_t _b, int16_t _c, int16_t _d);
void ANO_DT_Send_F3(int16_t _a, int16_t _b, int32_t _c );
#endif
添加测试代码
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GAgqw5BV-1675083353082)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230103214655364.png)]
//电机速度等信息发送到上位机
//注意上位机不支持浮点数,所以要乘100
ANO_DT_Send_F2(Motor1Speed*100, 3.0*100,Motor2Speed*100,3.0*100);
下面设置上位机-数据解析
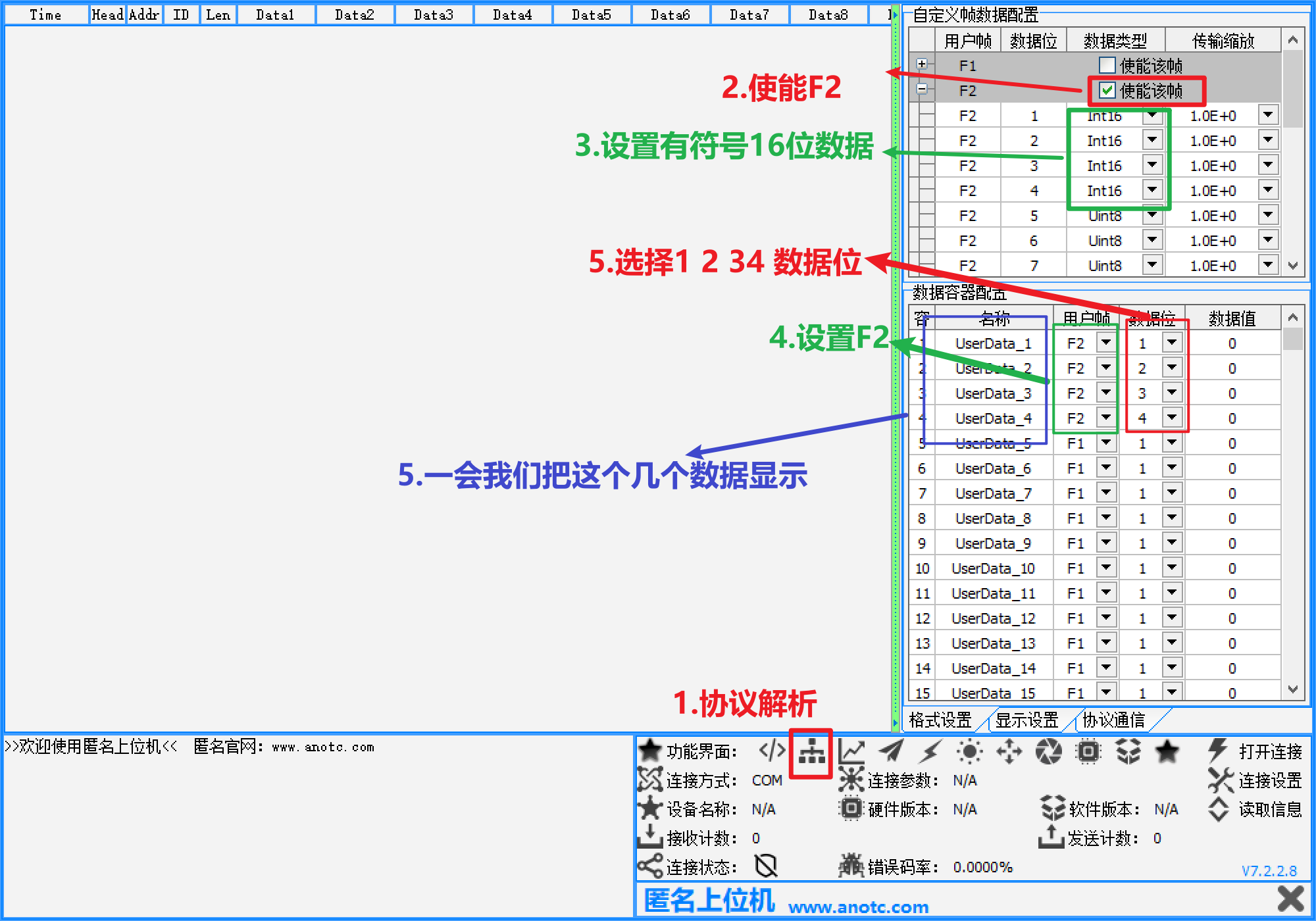
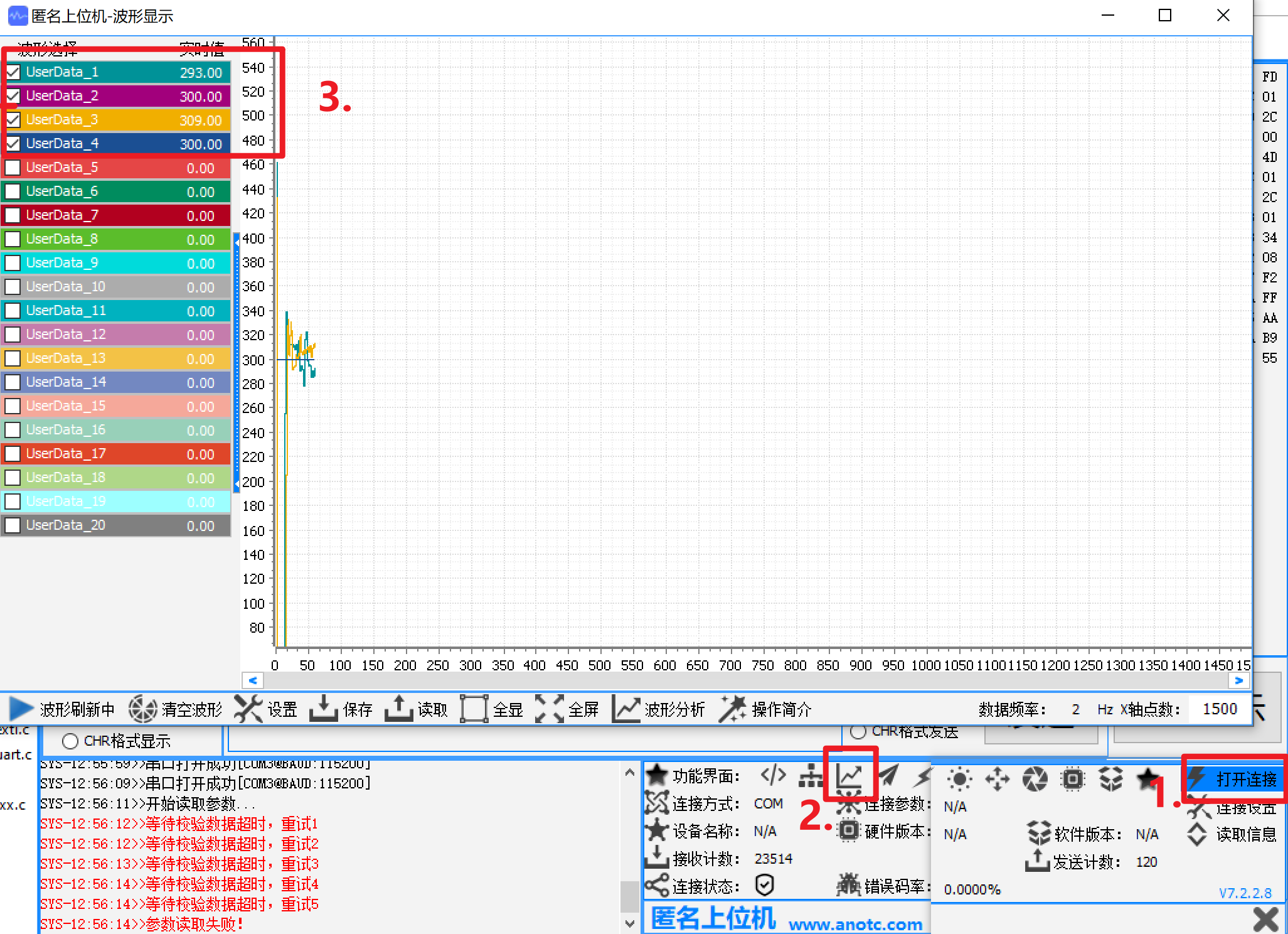
这个是控制效果,并不理想,后面我们介绍PID控制
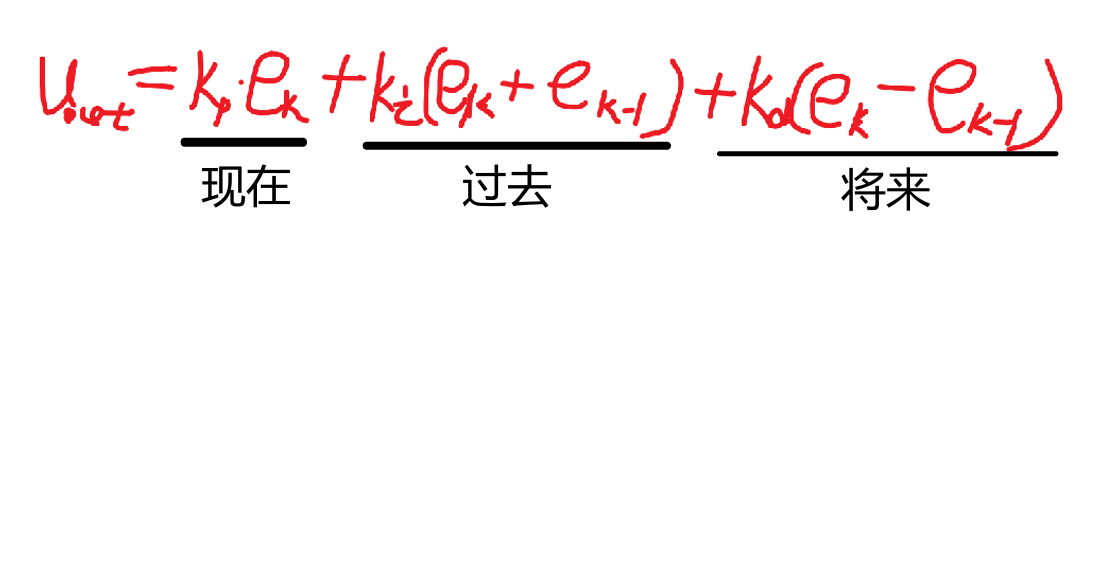
8.3-P I D 逐个参数理解

加入的现在 过去 未来概念
p:现在
i:过去
d:未来
那么我们就开始写PID
PID的结构体类型变量、里面成员都是浮点类型
先在pid.h声明一个结构体类型、声明.c中的函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qDSiyz5r-1675083353084)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104132732080.png)]
#ifndef __PID_H
#define __PID_H
//声明一个结构体类型
typedef struct
{
float target_val;//目标值
float actual_val;//实际值
float err;//当前偏差
float err_last;//上次偏差
float err_sum;//误差累计值
float Kp,Ki,Kd;//比例,积分,微分系数
} tPid;
//声明函数
float P_realize(tPid * pid,float actual_val);
void PID_init(void);
float PI_realize(tPid * pid,float actual_val);
float PID_realize(tPid * pid,float actual_val);
#endif
然后在pid.c中定义结构体类型变量
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zsdoASI0-1675083353085)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104132821912.png)]
#include "pid.h"
//定义一个结构体类型变量
tPid pidMotor1Speed;
//给结构体类型变量赋初值
void PID_init()
{
pidMotor1Speed.actual_val=0.0;
pidMotor1Speed.target_val=0.00;
pidMotor1Speed.err=0.0;
pidMotor1Speed.err_last=0.0;
pidMotor1Speed.err_sum=0.0;
pidMotor1Speed.Kp=0;
pidMotor1Speed.Ki=0;
pidMotor1Speed.Kd=0;
}
//比例p调节控制函数
float P_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//当前误差=目标值-真实值
//比例控制调节 输出=Kp*当前误差
pid->actual_val = pid->Kp*pid->err;
return pid->actual_val;
}
//比例P 积分I 控制函数
float PI_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//当前误差=目标值-真实值
pid->err_sum += pid->err;//误差累计值 = 当前误差累计和
//使用PI控制 输出=Kp*当前误差+Ki*误差累计值
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum;
return pid->actual_val;
}
// PID控制函数
float PID_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;当前误差=目标值-真实值
pid->err_sum += pid->err;//误差累计值 = 当前误差累计和
//使用PID控制 输出 = Kp*当前误差 + Ki*误差累计值 + Kd*(当前误差-上次误差)
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum + pid->Kd*(pid->err - pid->err_last);
//保存上次误差: 这次误差赋值给上次误差
pid->err_last = pid->err;
return pid->actual_val;
}
然后在main中要调用PID_init();函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mP2vbqDI-1675083353085)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104132925536.png)]
PID_init();
p调节函数函数只根据当前误差进行控制
//比例p调节控制函数
float P_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//目标值减去实际值等于误差值
//比例控制调节
pid->actual_val = pid->Kp*pid->err;
return pid->actual_val;
}
主函数-可以估算当p=10 就有较好的响应速度
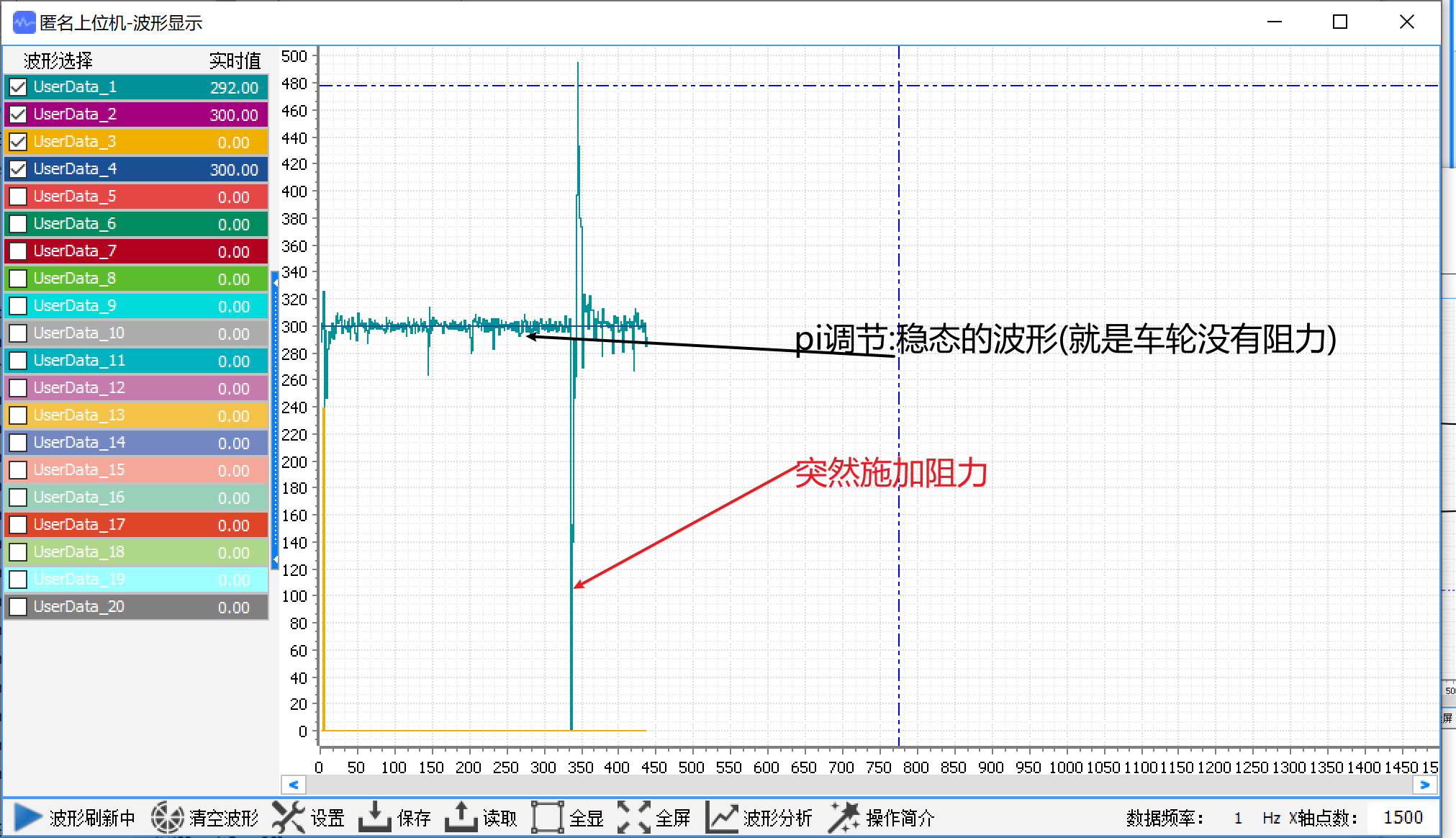
先看根据p比例控制的效果
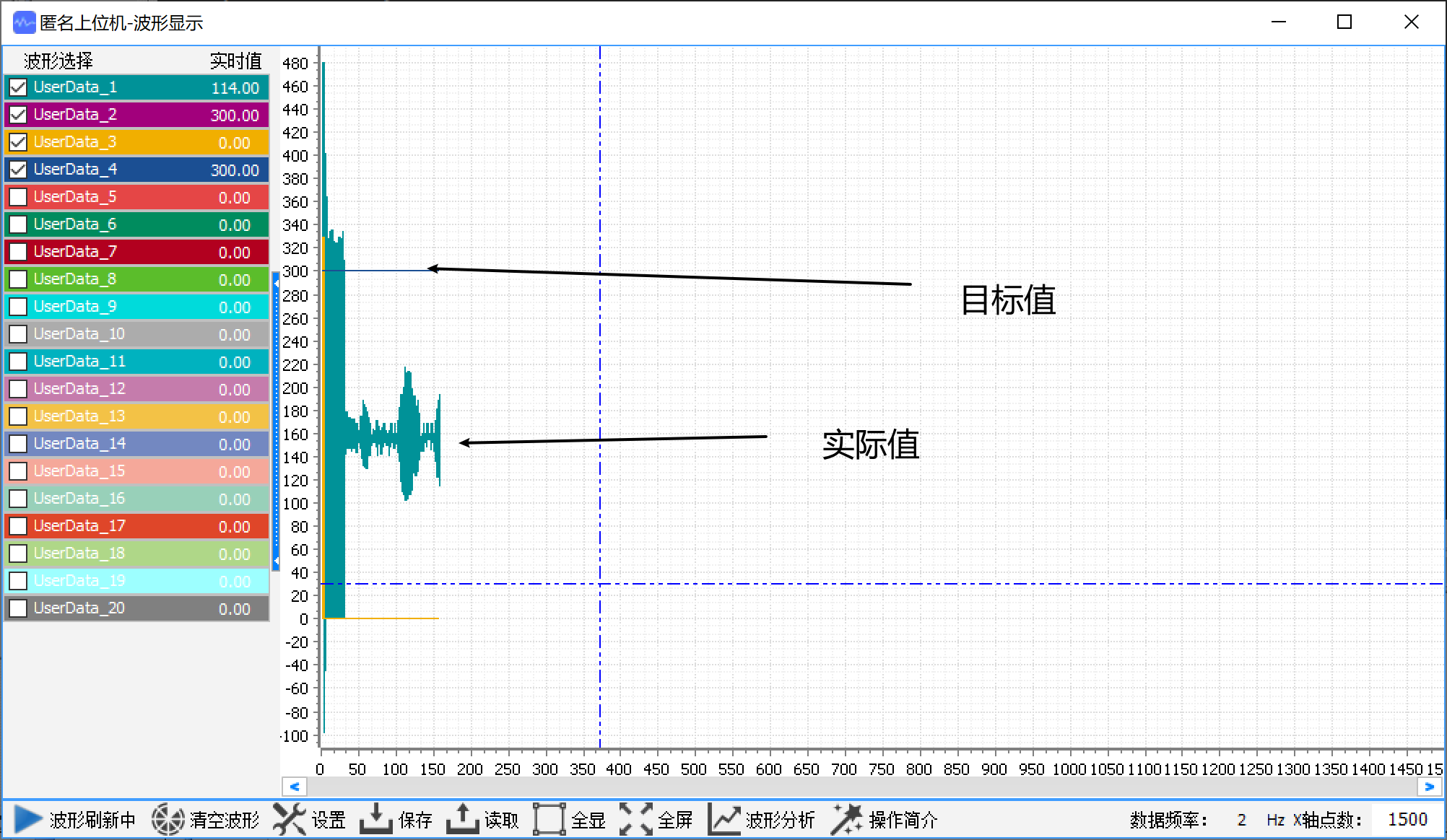
p调节 电机稳态后还是存在误差。
下面加入i 调节也就是加入历史误差
pi的控制函数
//比例P 积分I 控制函数
float PI_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//目标值减去实际值等于误差值
pid->err_sum += pid->err;//误差累计求和
//使用PI控制
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum;
return pid->actual_val;
}
因为实际值1.6的时候误差为1.4 上次偏差1.4和这次偏差1.4相加2.8 我们乘5 等于10点多就会有较好控制效果
这是pi 调节的控制效果
下面是PID调节的
// PID控制函数
float PID_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//目标值减去实际值等于误差值
pid->err_sum += pid->err;//误差累计求和
//使用PID控制
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum + pid->Kd*(pid->err - pid->err_last);
//保存上次误差:最近一次 赋值给上次
pid->err_last = pid->err;
return pid->actual_val;
}
8.4-加入cJSON方便上位机调参
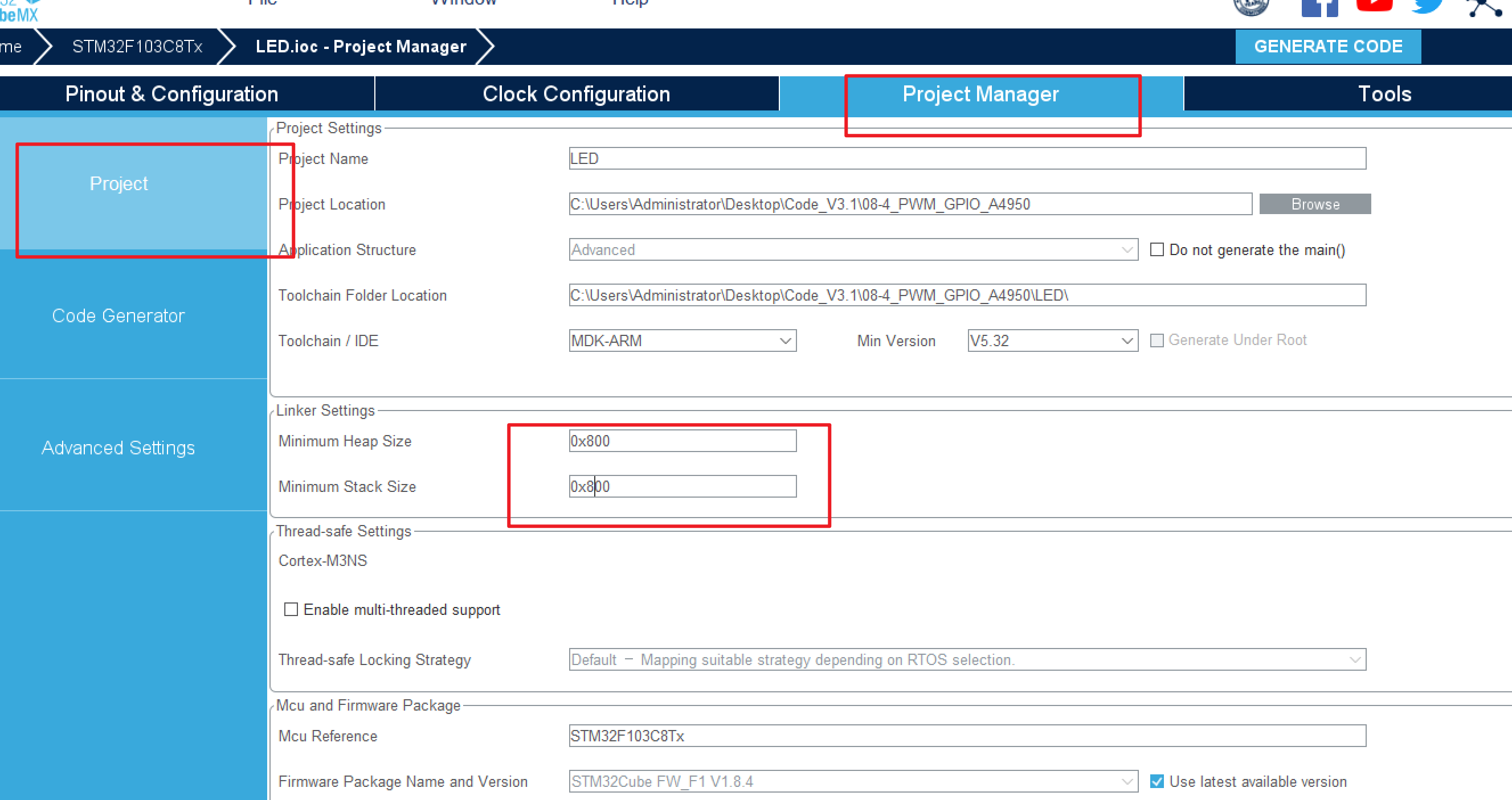
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DYKHbPkO-1675083353086)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104152600270.png)]
调大堆栈
软件开启中断

开启接收中断
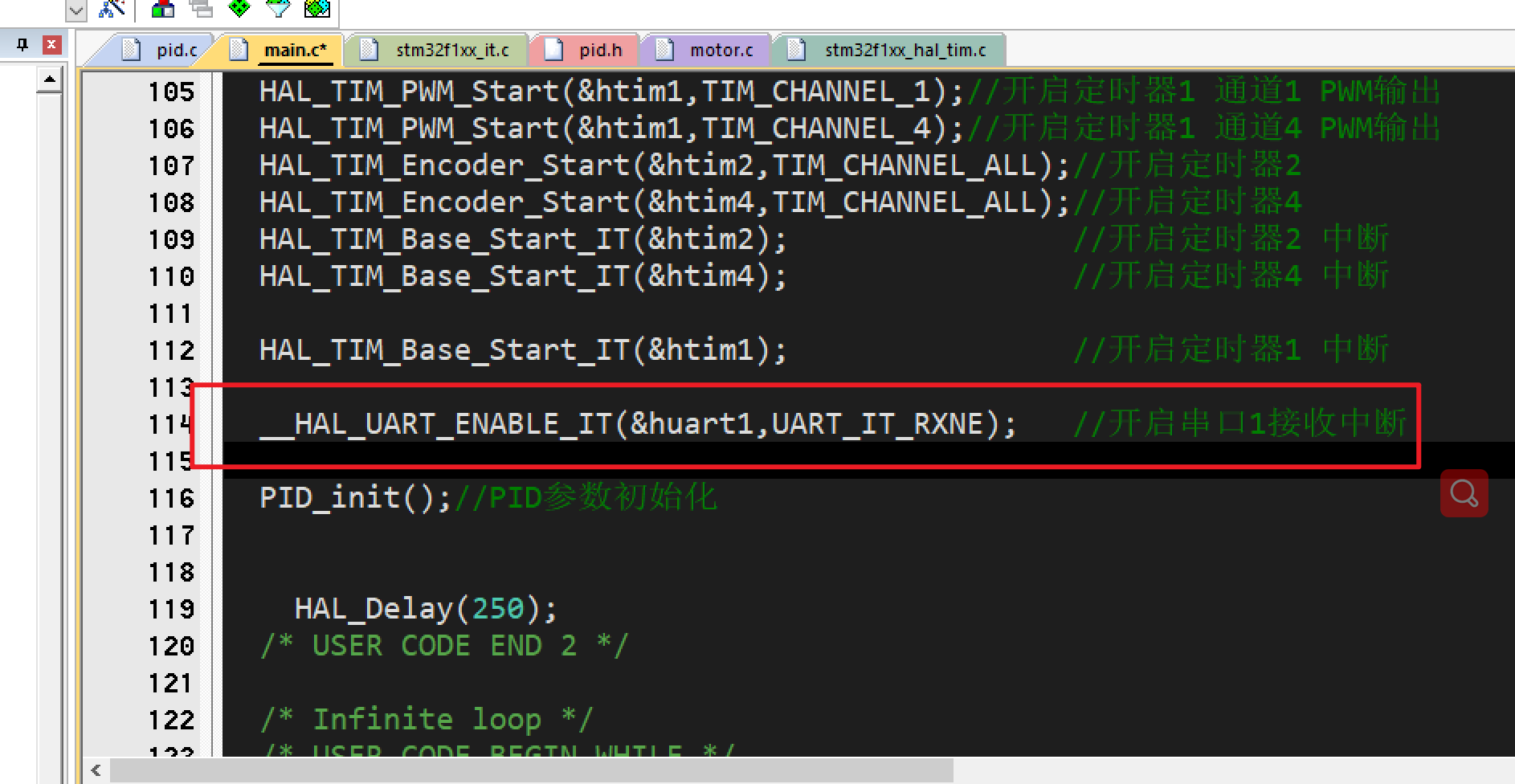
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE); //开启串口1接收中断
中断回调函数
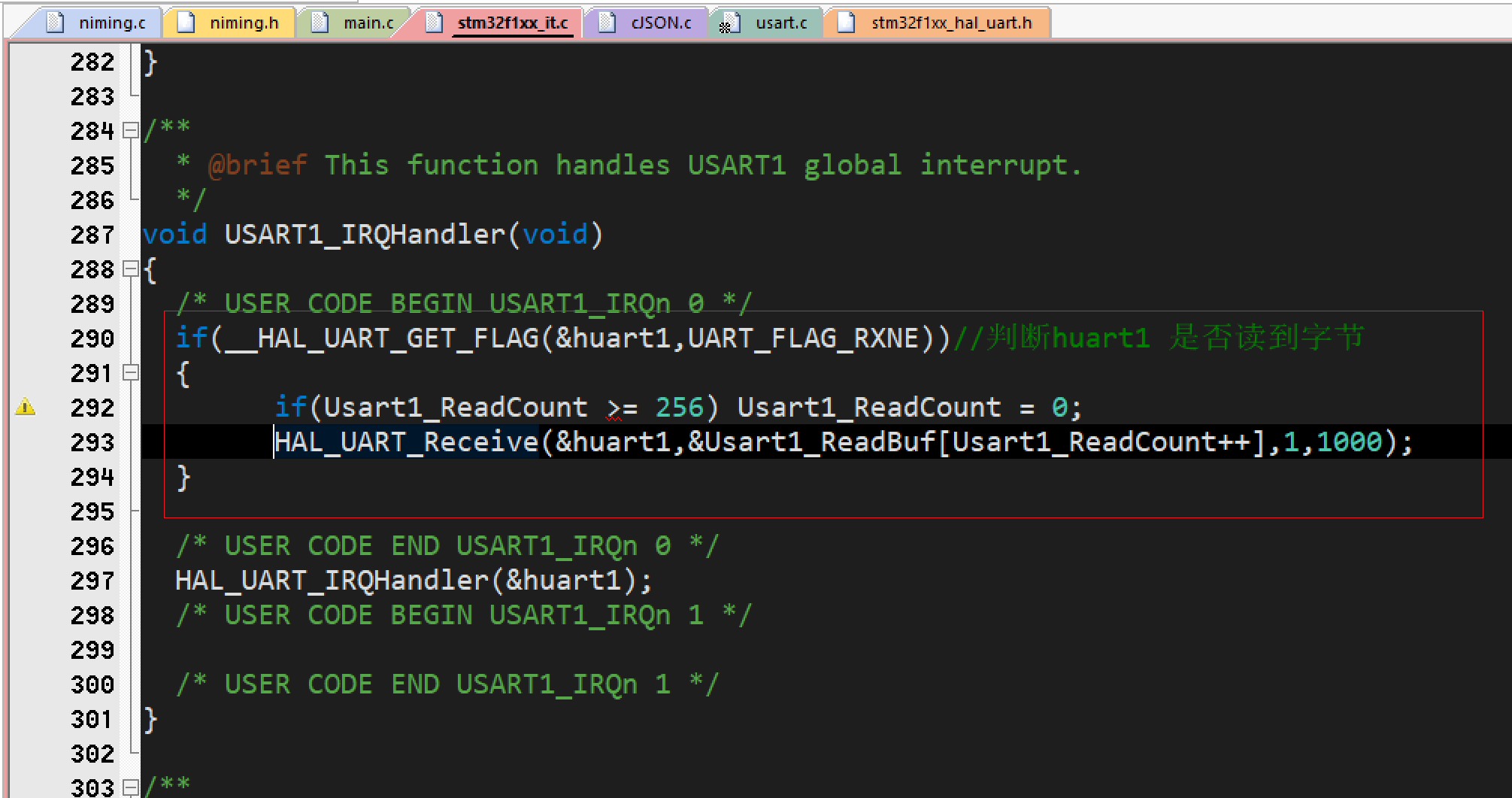
uint8_t Usart1_ReadBuf[256]; //串口1 缓冲数组
uint8_t Usart1_ReadCount = 0; //串口1 接收字节计数
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_RXNE))//判断huart1 是否读到字节
{
if(Usart1_ReadCount >= 255) Usart1_ReadCount = 0;
HAL_UART_Receive(&huart1,&Usart1_ReadBuf[Usart1_ReadCount++],1,1000);
}
编写函数用于判断串口是否发送完一帧数据
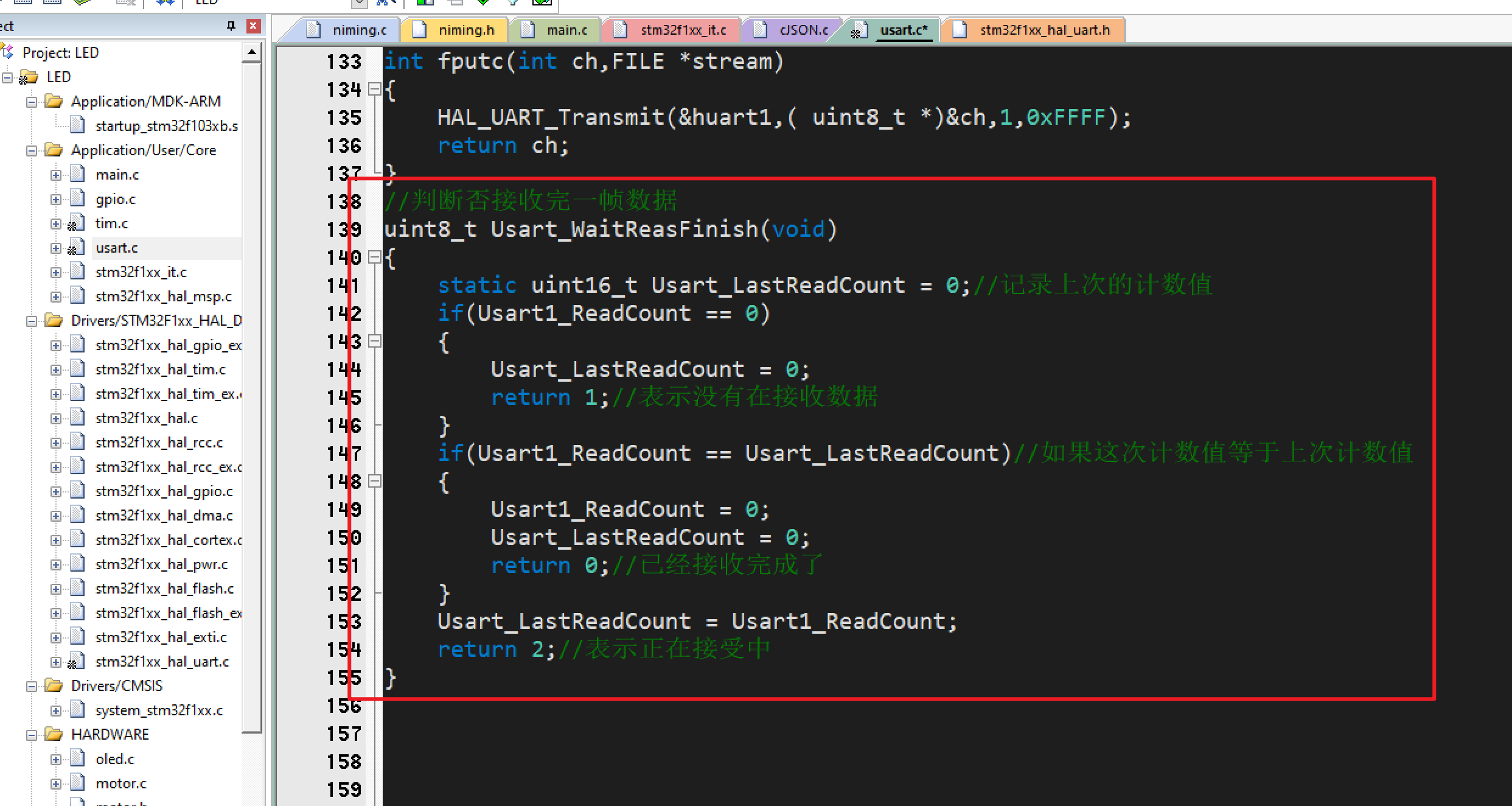
extern uint8_t Usart1_ReadBuf[255]; //串口1 缓冲数组
extern uint8_t Usart1_ReadCount; //串口1 接收字节计数
//判断否接收完一帧数据
uint8_t Usart_WaitReasFinish(void)
{
static uint16_t Usart_LastReadCount = 0;//记录上次的计数值
if(Usart1_ReadCount == 0)
{
Usart_LastReadCount = 0;
return 1;//表示没有在接收数据
}
if(Usart1_ReadCount == Usart_LastReadCount)//如果这次计数值等于上次计数值
{
Usart1_ReadCount = 0;
Usart_LastReadCount = 0;
return 0;//已经接收完成了
}
Usart_LastReadCount = Usart1_ReadCount;
return 2;//表示正在接受中
}
然后我们把cJSON库放入工程里面
下载cJSON新版
gtihub链接:https://github.com/DaveGamble/cJSON
百度网盘链接:https://pan.baidu.com/s/1AcNHtZuv5bokMQ2f6QoG7Q
提取码:a422
和添加其他文件一样,加入工程,然后指定路径
编写解析指令的函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HV7KMdrV-1675083353088)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104173819026.png)]
#include "cJSON.h"
#include <string.h>
cJSON *cJsonData ,*cJsonVlaue;
if(Usart_WaitReasFinish() == 0)//是否接收完毕
{
cJsonData = cJSON_Parse((const char *)Usart1_ReadBuf);
if(cJSON_GetObjectItem(cJsonData,"p") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"p");
p = cJsonVlaue->valuedouble;
pidMotor1Speed.Kp = p;
}
if(cJSON_GetObjectItem(cJsonData,"i") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"i");
i = cJsonVlaue->valuedouble;
pidMotor1Speed.Ki = i;
}
if(cJSON_GetObjectItem(cJsonData,"d") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"d");
d = cJsonVlaue->valuedouble;
pidMotor1Speed.Kd = d;
}
if(cJSON_GetObjectItem(cJsonData,"a") !=NULL)
{
cJsonVlaue = cJSON_GetObjectItem(cJsonData,"a");
a = cJsonVlaue->valuedouble;
pidMotor1Speed.target_val =a;
}
if(cJsonData != NULL){
cJSON_Delete(cJsonData);//释放空间、但是不能删除cJsonVlaue不然会 出现异常错误
}
memset(Usart1_ReadBuf,0,255);//清空接收buf,注意这里不能使用strlen
}
printf("P:%.3f I:%.3f D:%.3f A:%.3f\r\n",p,i,d,a);
测试发送cJSON数据就会解析收到数据

然后我们赋值改变一个电机的PID参数和目标转速
然后我们通过串口发送命令,就会改变PID的参数了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-12qmRHqn-1675083353088)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220821163121273.png)]
第九章-PID整定方法
9.1-调整合适的采样周期和PID调参方法
正如之前所说,现在我们PID控制函数是在主函数中循环调用,这样的调用方式并不能保证实时性,不能保证周期得到调用
所以我们要把PID控制函数放到中断里面定时执行,那么如何放到中断里面执行,执行的周期是多少合适那?

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WVBvsLou-1675083353089)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230104184558395.png)]
if(TimerCount %10 ==0)//每20ms一次
{
Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),0);
TimerCount=0;
}
}
烧录测试一下,是否可以改变波形和调整参数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tWK2lNbv-1675083353089)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220821180525104.png)]
借助上位机调节PID
- 调节P 把I=0、D=0先给正值或负值值测试P 正负、然后根据PID函数输入和输出估算P 大小,然后I=0 D=0去测试,调节一个较大值
- 调节I 把P等于前面的值 然后测试I给较大正值和负值 测试出I正负,然后I从小值调节,直到没有偏差存在
- 一般系统不使用D
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-suvlAlRF-1675083353089)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220821205656468.png)]
然后当前系统特点 :I 对于系统更重要
下面我们调节I
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ySQRQZ84-1675083353090)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220821211930247.png)]
给一个较小的i 发现 有一个大的超调,我们就减少p 、减小一半p
下面是减少一半p 的效果
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7OSkjxW4-1675083353090)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220821212416979.png)]
这个效果还可以
整理双电机速度控制
首先我们的需要是控制两个电机,那么这两个电机的特点不同,他们的P I D 参数不同,要控制不同的目标速度,那么他们的目标值、实际值、偏差等都会不同,所以我们的PID函数就要能够根据输入参数控制电机
我们增加tPid 类型函数的定义用于控制电机
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8tBFGnc2-1675083353090)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220822142131051.png)]
tPid pid1_speed;//电机1的转速控制
tPid pid2_speed;//电机2的转速控制
//初始化PID参数
void PID_init()
{
pid1_speed.actual_val=0.0;//初始化电机1转速PID 结构体
pid1_speed.target_val=0.0;
pid1_speed.err=0.0;
pid1_speed.err_last=0.0;
pid1_speed.err_sum=0.0;
pid1_speed.Kp=0.0;
pid1_speed.Ki=0.0;
pid1_speed.Kd=0.0;
pid2_speed.actual_val=0.0;//初始化电机2转速PID 结构体
pid2_speed.target_val=0.0;
pid2_speed.err=0.0;
pid2_speed.err_last=0.0;
pid2_speed.err_sum=0.0;
pid2_speed.Kp=0.0;
pid2_speed.Ki=0.0;
pid2_speed.Kd=0.0;
}
更改一下PID函数,这里我们使用结构体作为函数地址
访问因为是地址,访问结构体变量要用->
float PID_realize(tPid * pid,float actual_val)
{
pid->actual_val = actual_val;//传递真实值
pid->err = pid->target_val - pid->actual_val;//目标值减去实际值等于误差值
pid->err_sum += pid->err;//误差累计求和
//使用PID控制
pid->actual_val = pid->Kp*pid->err + pid->Ki*pid->err_sum + pid->Kd*(pid->err - pid->err_last);
//保存上次误差:最近一次 赋值给上次
pid->err_last = pid->err;
return pid->actual_val;
}
更改主函数,对PID函数的使用
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-q25C7HNz-1675083353090)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20220822143256375.png)]
然后可以分别调节电机1的参数和电机二的参数
把测试好的PID 参数分别写在PID_init里面
以上是入门篇
通过上面的学习与实操,大家对:PWM、电机驱动、PID闭环控制、串口通信等有了一定掌握,如果上面那个章节掌握不好,一定要多看两遍视频,多敲边代码,还有疑惑可以百度查找或者留言问题。
后面的内容就是偏应用比较简单了。
下面应用篇
第10章-小车跑一跑
如何实现小车的前、后、左、右、停
控制电机速度就可以控制小车运动
如何控制电机速度?
改变小车速度PID的目标值,然后定时器里面的PID控制函数就会计算输占空比然后控制小车。
代码如下:
定时器里面有电机控制,我们这里还增加Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),PID_realize(&pidMotor2Speed,Motor2Speed));
是为了提高实时性。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Xr5UxxWn-1675083353091)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230105131132508.png)]
/*******************
* @brief 通过PID控制电机转速
* @param Motor1Speed:电机1 目标速度、Motor2Speed:电机2 目标速度
* @return 无
*
*******************/
void motorPidSetSpeed(float Motor1SetSpeed,float Motor2SetSpeed)
{
//改变电机PID参数的目标速度
pidMotor1Speed.target_val = Motor1SetSpeed;
pidMotor2Speed.target_val = Motor2SetSpeed;
//根据PID计算 输出作用于电机
Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),PID_realize(&pidMotor2Speed,Motor2Speed));
}
很容易得到一下控制方式
// motorPidSetSpeed(1,2);//向右转弯
// motorPidSetSpeed(2,1);//向左转弯
// motorPidSetSpeed(1,1);//前进
// motorPidSetSpeed(-1,-1);//后退
// motorPidSetSpeed(0,0);//停止
向左原地转弯、向原地转弯
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-S0nU6pIT-1675083353091)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230105143208101.png)]
// motorPidSetSpeed(-1,1);//右原地旋转
// motorPidSetSpeed(1,-1);//左原地旋转
加速减速函数
//向前加速函数
void motorSpeedUp(void)
{
static float MotorSetSpeedUp=0.5;//静态变量 函数结束 变量不会销毁
if(MotorSetSpeedUp <= MAX_SPEED_UP) MotorSetSpeedUp +=0.5 ; //如果没有超过最大值就增加0.5
motorPidSetSpeed(MotorSetSpeedUp,MotorSetSpeedUp);//设置到电机
}
//向前减速函数
void motorSpeedCut(void)
{
static float MotorSetSpeedCut=3;//静态变量 函数结束 变量不会销毁
if(MotorSetSpeedCut >=0.5) MotorSetSpeedCut-=0.5;//判断是否速度太小
motorPidSetSpeed(MotorSetSpeedCut,MotorSetSpeedCut);//设置到电机
}
第11章-OLED速度与历程显示
这节我们显示两轮速度和里程
两轮速度很简单 之前已经计算过,那么如何计算里程那?
里程:小车行驶的路程长度。
这里我们只要计算出每个单位时间小车行驶的长度然后一直相加,就是这一段时间行驶的总里程长度了。
我们20ms计算一次,20ms走过了多少距离,然后一直相加,就是走的总距离,就是里程。这里我们使用使用电机1 车轮1进行计算。你也可以电机1 和电机2相加然后除2。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CLTwJu57-1675083353091)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230105235911920.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4D1YwnAy-1675083353092)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230105221819413.png)]
/*里程数(cm) += 时间周期(s)*车轮转速(转/s)*车轮周长(cm)*/
Mileage += 0.02*Motor1Speed*22;
然后主函数我们通过OLED显示电机速度和小车里程
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PUPcrMU8-1675083353092)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230105234102312.png)]
sprintf((char *)OledString,"V1:%.2fV2:%.2f", Motor1Speed,Motor2Speed);//显示两个电机的速度
OLED_ShowString(0,0,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数
sprintf((char *)OledString,"Mileage:%.2f ",Mileage);//显示里程数
OLED_ShowString(0,1,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数
第12章-ADC采集电压和显示
什么是ADC
百度百科介绍:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QfXRSSGz-1675083353092)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108210407873.png)]
我们知道万用表 电压表可以测量电池,或者电路电压。那么我们是否可以通过单片机获得电压,方便我 们监控电池状态

如何测量我们的锂电池电压那?锂电池电压12V左右,单片机ADC最大测量电压3.3V,这里我们需要分 压电路分压。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5LPdBqk3-1675083353093)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108211039622.png)]
然后我们通过电阻分压,显而易见 ADC点的电压是VBAT_IN的 五分之一
- 软件初始化一下ADC 。
- 然后注意调长一点采样时间、这样精度才会更高一点。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7Loa44Pn-1675083353093)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221109232125714.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AXg30XbL-1675083353093)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108213505630.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ty8ogwFT-1675083353093)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108213614198.png)]
在adc.c文件添加ADC相关函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WhNOC5xx-1675083353094)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230106230750593.png)]
/*******************
* @brief 电池电压测量计算函数
* @param 无
* @return 小车电池电压
*
*******************/
float adcGetBatteryVoltage(void)
{
HAL_ADC_Start(&hadc2);//启动ADC转化
if(HAL_OK == HAL_ADC_PollForConversion(&hadc2,50))//等待转化完成、超时时间50ms
return (float)HAL_ADC_GetValue(&hadc2)/4096*3.3*5;//计算电池电压
return -1;
}
在main中调用显示函数显示电压
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UzNpGb7R-1675083353094)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230106230924860.png)]
sprintf((char*)OledString, "U:%.2fV", adcGetBatteryVoltage());
OLED_ShowString(0,2,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
第13章-循迹功能
13.1-非PID循迹功能完成
先红外对管调试
我们这里学习一下,如何实现循迹功能
如何才能让小车沿着黑线运动、要让小车感知到黑线的位置,使用这种传感器就可以反馈黑线是否存在

根据传感器特性,我们检测红外对管DO引脚的电压就可以知道,下面有没有黑线
DO 高电平->有黑线 小灯灭
DO低电平->没有黑线 小灯亮
这是好多地方对这个产品的说明

然后我们组合上面的红外对管,安装到小车上,就可以知道小车是否偏离了黑线,
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uQ9Zqjyb-1675083353094)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107012917946.png)]
下面我们通过单片机读取红外对管DO口的电压,就知道黑线在小车下面的位置了
STM32初始化
先看原理图需要初始化那些引脚

把OUT_1-PA5、OUT_2-PA7、OUT_3-PB0、OUT_4-PB1初始化为输入模式
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-w7pcGKgQ-1675083353095)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221110230859290.png)]
重新生成
然后我们在gpio.h 添加读取GPIO的宏,使得程序更简洁
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-szA1ivzZ-1675083353095)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221110232405800.png)]
#define READ_HW_OUT_1 HAL_GPIO_ReadPin(HW_OUT_1_GPIO_Port,HW_OUT_1_Pin) //读取红外对管连接的GPIO电平
#define READ_HW_OUT_2 HAL_GPIO_ReadPin(HW_OUT_2_GPIO_Port,HW_OUT_2_Pin)
#define READ_HW_OUT_3 HAL_GPIO_ReadPin(HW_OUT_3_GPIO_Port,HW_OUT_3_Pin)
#define READ_HW_OUT_4 HAL_GPIO_ReadPin(HW_OUT_4_GPIO_Port,HW_OUT_4_Pin)
根据红外对管状态控制电机速度
注意:整个主函数不要加入延时,这样实时性更高,可以根据红外对管状态做出及时控制
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6mGg9sRU-1675083353095)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107165249367.png)]
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("应该前进\r\n");
motorPidSetSpeed(1,1);//前运动
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 1&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("应该右转\r\n");
motorPidSetSpeed(0.5,2);//右边运动
}
if(READ_HW_OUT_1 == 1&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("快速右转\r\n");
motorPidSetSpeed(0.5,2.5);//快速右转
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 1&&READ_HW_OUT_4 == 0 )
{
printf("应该左转\r\n");
motorPidSetSpeed(2,0.5);//左边运动
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 1 )
{
printf("快速左转\r\n");
motorPidSetSpeed(2.5,0.5);//快速左转
}
然后测试
- 测试红外对管灵敏度,放在有黑线的地上或者纸上,然后把小车黑线比如放到最右边 及第一个红外对管,观察红外对管小灯变化情况和串口输出情况,如果小灯没有灭,就调节红外对管灵敏度和室内灯光,直到每个红外对管都可以感应到小灯。
- 然后在黑线上让小车循迹
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-e7kqsA9x-1675083353095)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107152753253.png)]
然后循迹功能完成
然后放到地上
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ToaXGSFo-1675083353098)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107185627568.png)]
13.2-加入循迹PID
前面的代码我们对循迹是判断的几个状态,然后PID控制电机不同速度,但是我们可以使用红外对管状态作为PID控制的输入然后再控制电机。
PID的输入是红外对管状态,我们设计 PID输入是红外对管的状态、然后输出一个速度值,然后左右电机去加或者减这个值,就可以完成根据红外对管输入对电机的差速控制
主函数添加的
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IoPUOhho-1675083353099)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107210726187.png)]
extern tPid pidHW_Tracking;//红外循迹的PID
uint8_t g_ucaHW_Read[4] = {0};//保存红外对管电平的数组
int8_t g_cThisState = 0;//这次状态
int8_t g_cLastState = 0; //上次状态
float g_fHW_PID_Out;//红外对管PID计算输出速度
float g_fHW_PID_Out1;//电机1的最后循迹PID控制速度
float g_fHW_PID_Out2;//电机2的最后循迹PID控制速度
然后实现PID循迹控制、注意为了更加快,要减少没有必要的程序和优化判断、将没有必要的输出都注释掉
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ANO2czOA-1675083353100)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107210854550.png)]
g_ucaHW_Read[0] = READ_HW_OUT_1;//读取红外对管状态、这样相比于写在if里面更高效
g_ucaHW_Read[1] = READ_HW_OUT_2;
g_ucaHW_Read[2] = READ_HW_OUT_3;
g_ucaHW_Read[3] = READ_HW_OUT_4;
if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
// printf("应该前进\r\n");//注释掉更加高效,减少无必要程序执行
g_cThisState = 0;//前进
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )//使用else if更加合理高效
{
// printf("应该右转\r\n");
g_cThisState = -1;//应该右转
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
// printf("快速右转\r\n");
g_cThisState = -2;//快速右转
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0)
{
// printf("快速右转\r\n");
g_cThisState = -3;//快速右转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 0 )
{
// printf("应该左转\r\n");
g_cThisState = 1;//应该左转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 1 )
{
// printf("快速左转\r\n");
g_cThisState = 2;//快速左转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 1)
{
// printf("快速左转\r\n");
g_cThisState = 3;//快速左转
}
g_fHW_PID_Out = PID_realize(&pidHW_Tracking,g_cThisState);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fHW_PID_Out1 = 3 + g_fHW_PID_Out;//电机1速度=基础速度+循迹PID输出速度
g_fHW_PID_Out2 = 3 - g_fHW_PID_Out;//电机1速度=基础速度-循迹PID输出速度
if(g_fHW_PID_Out1 >5) g_fHW_PID_Out1 =5;//进行限幅 限幅速度在0-5之间
if(g_fHW_PID_Out1 <0) g_fHW_PID_Out1 =0;
if(g_fHW_PID_Out2 >5) g_fHW_PID_Out2 =5;
if(g_fHW_PID_Out2 <0) g_fHW_PID_Out2 =0;
if(g_cThisState != g_cLastState)//如何这次状态不等于上次状态、就进行改变目标速度和控制电机、在定时器中依旧定时控制电机
{
motorPidSetSpeed(g_fHW_PID_Out1,g_fHW_PID_Out2);//通过计算的速度控制电机
}
g_cLastState = g_cThisState;//保存上次红外对管状态
在pid.中
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oP5W5nBy-1675083353101)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107211037921.png)]
tPid pidHW_Tracking;//红外循迹的PID
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8WwIWOb9-1675083353102)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230107211104780.png)]
pidHW_Tracking.actual_val=0.0;
pidHW_Tracking.target_val=0.00;//红外循迹PID 的目标值为0
pidHW_Tracking.err=0.0;
pidHW_Tracking.err_last=0.0;
pidHW_Tracking.err_sum=0.0;
pidHW_Tracking.Kp=-1.50;
pidHW_Tracking.Ki=0;
pidHW_Tracking.Kd=0.80;
然后就可以跑一下试试了。
可以改进的地方
- 红外对管影响差速转向,也影响基础直行的速度 ,会有更好控制效果,所以可以加入每种红外对管状态下对基础速度的影响。
- 红外对管的数量越多,效果会越好。
第14章-手机遥控功能
我们要实现蓝牙遥控功能,蓝牙遥控功能要使用:1.单片机的串口、2.蓝牙通信模块
所以我们先调试好:单片机的串口->蓝牙模块->接到一起联调
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kCzc0n6w-1675083353102)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108094941496.png)]
14.1-电脑控制小车
完成功能:电脑连接单片机串口三 控制小车前进后退
先看原理图
通过原理图可以看出这是使用的串口3 在使用的时候注意把跳线帽,跳线到蓝牙通信位置
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-q01IbYjd-1675083353103)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221113145542144.png)]
打开初始化软件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HxRxgOKa-1675083353104)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221113161440641.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-aJZS5I7s-1675083353105)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221113162259965.png)]
生成代码
在main 定义全局变量
uint8_t g_ucUsart3ReceiveData; //保存串口三接收的数据
开启串口三中断接收
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gqhU0yI3-1675083353106)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108011852886.png)]
HAL_UART_Receive_IT(&huart3,&g_ucUsart3ReceiveData,1); //串口三接收数据
在usart.c 重新实现串口中断回调函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8zBEBZU4-1675083353106)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221113163755469.png)]
然后我们可以在中断回调函数里面中编写遥控命令控制逻辑了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wyZ6dFxq-1675083353107)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108021416560.png)]
//串口接收回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if( huart == &huart3)//判断中断源
{
if(g_ucUsart3ReceiveData == 'A') motorPidSetSpeed(1,1);//前运动
if(g_ucUsart3ReceiveData == 'B') motorPidSetSpeed(-1,-1);//后运动
if(g_ucUsart3ReceiveData == 'C') motorPidSetSpeed(0,0);//停止
if(g_ucUsart3ReceiveData == 'D') motorPidSetSpeed(1,2);//右边运动
if(g_ucUsart3ReceiveData == 'E') motorPidSetSpeed(2,1);//左边运动
if(g_ucUsart3ReceiveData == 'F') motorPidSpeedUp();//加速
if(g_ucUsart3ReceiveData == 'G') motorPidSpeedCut();//减速
HAL_UART_Receive_IT( &huart3, &g_ucUsart3ReceiveData, 1);//继续进行中断接收
}
}
在usart.c中声明外部变量
extern uint8_t g_ucUsart3ReceiveData; //保存串口三接收的数据
然后我们更改一下 主函数内容,把PID红外循迹代码注释掉,然后我们增加串口三的输出,以便我们后面观察数据。
串口不定长输出
我们把转速等信息都可以显示在OLED上,那么如何通过串口输出那?
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eLCJBGUB-1675083353107)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108115259681.png)]
sprintf((char *)Usart3String,"V1:%.2fV2:%.2f\r\n",Motor1Speed,Motor2Speed);//显示两个电机转速 单位:转/秒
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"Mileage%.2f\r\n",Mileage);//计算小车里程 单位cm
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"U:%.2fV\r\n",adcGetBatteryVoltage());//显示电池电压
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
HAL_Delay(5);
把之前PID初始化时候速度PID目标值改成0
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-19EO3bxr-1675083353108)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108113408329.png)]
然后我们测试
硬件连接
我们现在使用USB-TTL连接串口三,单片机串口三与电脑通信(底板不需要插入蓝牙)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LNSAxvuL-1675083353109)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108121744588.png)]
然后打开软件
发送指令小车就会对应运动
在电脑串口软件查看输出信息、发送 指令控制小车运动
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-aiSQY0FK-1675083353109)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108115952589.png)]
14.2-手机蓝牙控制小车
功能:蓝牙遥控小车前进、后退、停止、左右转、加速、减速、手机显示数据
蓝牙模块和电脑通信
蓝牙模块-硬件介绍
使用:HC-05 主从机一体蓝牙串口透传模块
注意: 供电3.6V-6V(最好5V)
引脚顺序 VCC GND TXD RXD
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fqYKdDii-1675083353109)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114115307410.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hrdFd1i9-1675083353110)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114115640083.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-EcxAOH5a-1675083353110)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114115333609.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6ZUfSzNh-1675083353111)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114115624973.png)]
先调试蓝牙模块-设置波特率
如图先把蓝牙模块通过USB-TTL模块相连接,然后
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-U11A05d7-1675083353112)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108124818109.png)]
如果反复测试不能进入AT模式,可能是新版蓝牙模块,
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-58BZyGDj-1675083353112)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108140057987.png)]
-
先连接好蓝牙模块的几根线,然后按住蓝牙模块的按键
-
然后连接电脑,然后几秒后蓝牙小灯慢闪,说明进入AT模式
-
然后串口助手通过38400发送设置指令:AT+UART=115200,0,0
-
然后收到OK数据,说明设置成功。
这个是设置波特率截图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-o9T6gqvy-1675083353113)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114120715660.png)]
-
然后重新拔插蓝牙模块(不用按按键)
-
在手机系统蓝牙配对HC-50 密码1234
-
串口助手设置波特率115200,然后打开手机APP发送任意内容测试
这个是后面通信测试截图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-S1iaDb9b-1675083353113)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114125011810.png)]
- 设置按键-按照代码设置按下发送的数据
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HtvBWejZ-1675083353113)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108125417623.png)]
蓝牙模块连接单片机
把蓝牙插入到底板、跳线帽选择蓝牙通信
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ISZtkML6-1675083353114)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114131242210.png)]
按下不同按钮小车会对应控制
第A章-定位程序异常位置
参考连接:https://blog.csdn.net/supermuscleman/article/details/103929606
程序功能多 代码较多、可能会出现一些异常,如何锁定程序异常位置非常重要
-
进入硬件调试-点击全速运行
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2OeHmOmO-1675083353114)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173624343.png)]
通过LR的值确定当前堆栈使用的PSP或者MSP
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gbZLFr1X-1675083353115)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173713147.png)]
然后在memory中定位到堆栈地址、然后就找到LR=08000F2D、PC=08000A02
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-S3DTCPvA-1675083353115)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173741022.png)]
Disassembly中,查找定位代码
在反汇编窗口中点击右键,选中show disassembly at address 。
输入LR地址:为发生异常后调用的下一条指令的地址,可看到发生异常的为
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tDLfe8s8-1675083353115)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173813090.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6mU1BmBR-1675083353115)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173845927.png)]
输入PC地址:可以定位到发生异常的调用语句
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3ot2lmDW-1675083353116)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116173915126.png)]
然后我们通过上面的方法就找到了异常位置
第15章-超声波避障功能
15.1-超声波测距
完成超声波测距功能、测量数据显示在OLED屏幕上
硬件介绍
使用:HC-SR04 超声波测距模块
注意: 绘制PCB注意四个引脚顺序 Vcc Trig Echo Gnd
供电3.3V-5V(最好5V)

测距原理

不同模式

GPIO模式

查看原理图
通过超声波的硬件介绍我们知道
MCU给Trig脚一个大于10us的高电平脉冲;然后读取Echo脚的高电平信号时间,通过公式:距离 = T* 声速/2 就可以算出来距离。
Trig(PB5)我们配置为GPIO输出
Echo(PA6)我们配置GPIO输入功能
注:这里大家可能会问,为什么不使用定时器捕获功能?
原因:
- 留一个定时器 方便以后扩展FreeRTOS使用
- 或者扩展其他舵机、电机等
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Gwjf587V-1675083353116)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114165508600.png)]

软件初始化
设置PB5输出模式然后起别名
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4lld2e3j-1675083353117)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114195822786.png)]
设置PA6输入模式、
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f06jCoz3-1675083353117)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221114195850027.png)]
然后生成代码
自己新建HC_SR04.c和HC_SR04.h 然后加入工程,指定路径
防止溢出 把之前使用的数组调整大一些
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7WsOTk1i-1675083353118)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108180914033.png)]
因为我们不适用定时器所以我们需要自己写一个us级延时函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ggBNFXND-1675083353118)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221115164450164.png)]
/*******************
* @brief us级延时
* @param usdelay:要延时的us时间
* @return
*
*******************/
void HC_SR04_Delayus(uint32_t usdelay)
{
__IO uint32_t Delay = usdelay * (SystemCoreClock / 8U / 1000U/1000);//SystemCoreClock:系统频率
do
{
__NOP();
}
while (Delay --);
}
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JjmNLW9O-1675083353119)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221115165416779.png)]
/*******************
* @brief HC_SR04读取超声波距离
* @param 无
* @return 障碍物距离单位:cm (静止表面平整精度更高)
*注意:两个HC_SR04_Read()函数调用的时间间隔要2ms及以上,测量范围更大 精度更高
*******************/
float HC_SR04_Read(void)
{
uint32_t i = 0;
float Distance;
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_SET);//输出15us高电平
HC_SR04_Delayus(15);
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_RESET);//高电平输出结束,设置为低电平
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin) == GPIO_PIN_RESET)//等待回响高电平
{
i++;
HC_SR04_Delayus(1);
if(i>100000) return -1;//超时退出循环、防止程序卡死这里
}
i = 0;
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin) == GPIO_PIN_SET)//下面的循环是2us
{
i = i+1;
HC_SR04_Delayus(1);//1us 延时,但是整个循环大概2us左右
if(i >100000) return -2;//超时退出循环
}
Distance = i*2*0.033/2;//这里乘2的原因是上面是2微妙
return Distance ;
}
然后就可以读距离了、连上蓝牙可以显示数据
注意:两个HC_SR04_Read()函数调用的时间间隔要2ms及以上,测量范围更大 精度更高
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-82XiqPnf-1675083353119)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230108182646710.png)]
sprintf((char *)Usart3String,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小
然后把我们的手机蓝牙和小车蓝牙连接
手机显示

15.2-避障逻辑编写

然后我们编写循迹逻辑,我们的逻辑时
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kRK3TZd3-1675083353120)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109001446486.png)]
//**************避障功能********************//
//避障逻辑
if(HC_SR04_Read() > 25)//前方无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{ //前方有障碍物
motorPidSetSpeed(-1,1);//右边运动 原地
HAL_Delay(500);
if(HC_SR04_Read() > 25)//右边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{//右边有障碍物
motorPidSetSpeed(1,-1);//左边运动 原地
HAL_Delay(1000);
if(HC_SR04_Read() >25)//左边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{
motorPidSetSpeed(-1,-1);//后运动
HAL_Delay(1000);
motorPidSetSpeed(-1,1);//右边运动
HAL_Delay(50);
}
}
}
第16章-超声波跟随功能
无PID跟随功能
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QyowVtOK-1675083353120)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203220330848.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TJMTle77-1675083353120)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109013951233.png)]
//超声波跟随
if(HC_SR04_Read() > 25)
{
motorForward();//前进
HAL_Delay(100);
}
if(HC_SR04_Read() < 20)
{
motorBackward();//后退
HAL_Delay(100);
}
PID跟随功能
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Pmkmm9z4-1675083353121)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111101326946.png)]
在pid.c中定义一组PID参数
tPid pidFollow; //定距离跟随PID
pidFollow.actual_val=0.0;
pidFollow.target_val=22.50;//定距离跟随 目标距离22.5cm
pidFollow.err=0.0;
pidFollow.err_last=0.0;
pidFollow.err_sum=0.0;
pidFollow.Kp=-0.5;//定距离跟随的Kp大小通过估算PID输入输出数据,确定大概大小,然后在调试
pidFollow.Ki=-0.001;//Ki小一些
pidFollow.Kd=0;
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ZbqVt30R-1675083353121)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109141345691.png)]
//**********PID跟随功能***********//
g_fHC_SR04_Read=HC_SR04_Read();//读取前方障碍物距离
if(g_fHC_SR04_Read < 60){ //如果前60cm 有东西就启动跟随
g_fFollow_PID_Out = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID计算输出目标速度 这个速度,会和基础速度加减
if(g_fFollow_PID_Out > 6) g_fFollow_PID_Out = 6;//对输出速度限幅
if(g_fFollow_PID_Out < -6) g_fFollow_PID_Out = -6;
motorPidSetSpeed(g_fFollow_PID_Out,g_fFollow_PID_Out);//速度作用与电机上
}
else motorPidSetSpeed(0,0);//如果前面60cm 没有东西就停止
HAL_Delay(10);//读取超声波传感器不能过快
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XkLKFUlB-1675083353121)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109141645038.png)]
然后编译,烧录测试 。
第17章-用6050走直线和转90度功能
17.1-6050姿态数据读取
STM32读取6050数据
先把我们的参考历程里面的6050文件复制过去
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qtiRtx2j-1675083353122)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109185706496.png)]
添加文件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6LOPciEE-1675083353122)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116231529074.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5omNtDxH-1675083353122)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117170521769.png)]
然后在魔术棒添加上面两个的路径,不再截图了。
简单阅读代码,知道 我们需要设置两个引脚,这两个引脚使用模拟IIC读取6050数据
1.在mpuiic.c延时使用自己写的、引脚需要使用两个先设置推挽输出、高电平
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vQ1zNLz1-1675083353123)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116232049948.png)]
void mpuiic_Delayus(uint32_t usdelay)
{
__IO uint32_t Delay = usdelay * (SystemCoreClock /8U/1000U/1000);//SystemCoreClock:系统频率
do
{
__NOP();//使用空指令延时、移植不同单片机注意__NOP(); 执行时间
}
while (Delay --);
}
//MPU IIC 延时函数
void MPU_IIC_Delay(void)
{
mpuiic_Delayus(2);
}
//初始化IIC
void MPU_IIC_Init(void)
{
// GPIO_InitTypeDef GPIO_InitStructure;
//
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//先使能外设IO PORTB时钟
//
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; // 端口配置
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
// GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIO
//
// GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //PB10,PB11 输出高
}
使用软件初始化两个引脚
6050_SDA–PB9
6050_SCL–PB8

PB8-输出模式-起始输出高电平
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DOkhQUMY-1675083353123)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117172343943.png)]
PB9 输出模式 起始状态高电平
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cHOMWKGW-1675083353123)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117172405281.png)]
生成代码
打开我们的代码,是通过模拟IIC 读取6050数据的,我们知道SDA是模拟IIC的数据线 所以通信过程中是再输入和输出模式中切换的,但是我们的STM32CubeMX是设置的输出,是在哪里更改的模式那?
是通过寄存器设置的,在mpuiic.h可以看到
删除掉#include “sys.h”
把这个修改了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BXPaKmLo-1675083353124)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116233155491.png)]
2.在mpuiic.h更改相内容
改成下面这样的
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JxCyVS1D-1675083353124)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109224033045.png)]
//IO方向设置 设置SDA-PB9为输入或者输出
#define MPU_SDA_IN() {GPIOB->CRH&=0XFFFFFF0F;GPIOB->CRH|=8<<4;}
#define MPU_SDA_OUT() {GPIOB->CRH&=0XFFFFFF0F;GPIOB->CRH|=3<<4;}
-
这是通过按位与后赋值 &= 和 按位或后赋值 |=
-
设置端口配置高寄存器指定位。
先看一个例子
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fWcUxt0E-1675083353124)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110094443036.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jIvBWA23-1675083353125)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110000816677.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2BmM3LcL-1675083353125)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117133006922.png)]
更改设置SDA与SCL电平的宏
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-db5CqYrS-1675083353126)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117143405668.png)]
//IO操作函数
#define MPU_IIC_SCL_Hige HAL_GPIO_WritePin(SCL_6050_GPIO_Port,SCL_6050_Pin,GPIO_PIN_SET)//设置SCL高电平
#define MPU_IIC_SCL_Low HAL_GPIO_WritePin(SCL_6050_GPIO_Port,SCL_6050_Pin,GPIO_PIN_RESET)//设置SCL低电平
#define MPU_IIC_SDA_Hige HAL_GPIO_WritePin(SDA_6050_GPIO_Port,SDA_6050_Pin,GPIO_PIN_SET) //设置SDA高电平
#define MPU_IIC_SDA_Low HAL_GPIO_WritePin(SDA_6050_GPIO_Port,SDA_6050_Pin,GPIO_PIN_RESET) //设置SDA低电平
#define MPU_READ_SDA HAL_GPIO_ReadPin(SDA_6050_GPIO_Port,SDA_6050_Pin) //读SDA电平
更改一下 mupiic.c文件
把
//把之前的MPU_IIC_SDA=1; 换成 MPU_IIC_SDA_Hige;
//MPU_IIC_SDA=0; 换成 MPU_IIC_SDA_Low;
//MPU_IIC_SCL=1; 换成 MPU_IIC_SCL_Hige;
//MPU_IIC_SCL=0; 换成 MPU_IIC_SCL_Low;
//
编译一下、删掉没有用的文件
把u8 替换为uint8_t
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7Uc7NkTz-1675083353126)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117144658042.png)]
t替换一下,u8 替换为uint8_t u32替换为uint32_t
可以一个文件一个文件的替换掉,如果整个工程替换其他HAL库文件内容也可能改变了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2Z0PwZ8C-1675083353126)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117144918696.png)]
删除多余的库文件
注释掉
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nH4AMPJ5-1675083353127)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117164409292.png)]
如果有其他的delay_ms 都替换为HAL_Delay
还有一个错误
if((txd&0x80)>>7) MPU_IIC_SDA_Hige;
else MPU_IIC_SDA_Low;
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-X8BObnrm-1675083353127)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117164701076.png)]
编译一下 、没有错误和警告
然后在main.c中定义变量和添加同文件
float pitch,roll,yaw; // 俯仰角 横滚角 航向角
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ixt0vU6o-1675083353128)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117165511717.png)]
替换inv_mpu.h的
#include "stm32f1xx_it.h"
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nRUjQi0e-1675083353128)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117165920050.png)]
初始化6050
HAL_Delay(500);//延时0.5秒 6050上电稳定后初始化
MPU_Init(); //初始化MPU6050
while(MPU_Init()!=0);
while(mpu_dmp_init()!=0);
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-g1X36pA3-1675083353128)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109213955121.png)]
我们通过下面的代码获得数据
sprintf((char *)Usart3String,"pitch:%.2f roll:%.2f yaw:%.2f\r\n",pitch,roll,yaw);//显示6050数据
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小
//mpu_dmp_get_data(&pitch,&roll,&yaw);//返回值:0,DMP成功解出欧拉角
while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Isig35C2-1675083353129)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109214556197.png)]
然后我看一下 这个Usart3String 现在发送的大概多大的?
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f0xcPGT4-1675083353129)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230109215719786.png)]
uint8_t OledString[50];
uint8_t Usart3String[50];
编译、烧录、然后就可以连接手机蓝牙,在蓝牙软件查看数据了

17.2-利用6050直线和90度(有代码)
为什么小车还是不能走直线
为什么两个电机转速一样不能走非常正直线,如何控制小车转弯90度。
当然,我们可以开环控制,但是控制效果可能不好,受外界影响比较大。
如果我们使用闭环控制,就要使用一个传感器来获得现在小车角度。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GKM43aXI-1675083353129)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221203222808445.png)]
https://www.bilibili.com/video/BV1UV4y1p7Hd/?spm_id_from=333.337.search-card.all.click
走直线(控制朝一个方向运动)
在pid.c中定义一个姿态控制使用的PID
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ADHO0dVD-1675083353130)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110160756280.png)]
tPid pidMPU6050YawMovement; //利用6050偏航角 进行姿态控制的PID
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0FjpH6Yk-1675083353130)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110163152585.png)]
pidMPU6050YawMovement.actual_val=0.0;
pidMPU6050YawMovement.target_val=0.00;//设定姿态目标值
pidMPU6050YawMovement.err=0.0;
pidMPU6050YawMovement.err_last=0.0;
pidMPU6050YawMovement.err_sum=0.0;
pidMPU6050YawMovement.Kp=2;//定距离跟随的Kp大小通过估算PID输入输出数据,确定大概大小,然后在调试
pidMPU6050YawMovement.Ki=0;
pidMPU6050YawMovement.Kd=0;
仿照之前红外循迹代码编写姿态控制函数
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tdwgSSF5-1675083353130)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110163514918.png)]
float g_fMPU6050YawMovePidOut = 0.00f; //姿态PID运算输出
float g_fMPU6050YawMovePidOut1 = 0.00f; //第一个电机控制输出
float g_fMPU6050YawMovePidOut2 = 0.00f; //第一个电机控制输出
走直线程序如下(因为上电初始化时候航向角是0、而且pidMPU6050YawMovementPID结构体的目标值target_val 也是0)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wUpkmQTI-1675083353131)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110165825685.png)]
//*************MPU6050航向角 PID转向控制*****************//
sprintf((char *)Usart3String,"pitch:%.2f roll:%.2f yaw:%.2f\r\n",pitch,roll,yaw);//显示6050数据 俯仰角 横滚角 航向角
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小
//mpu_dmp_get_data(&pitch,&roll,&yaw);//返回值:0,DMP成功解出欧拉角
while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题
g_fMPU6050YawMovePidOut = PID_realize(&pidMPU6050YawMovement,yaw);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fMPU6050YawMovePidOut1 = 1.5 + g_fMPU6050YawMovePidOut;//基础速度加减PID输出速度
g_fMPU6050YawMovePidOut2 = 1.5 - g_fMPU6050YawMovePidOut;
if(g_fMPU6050YawMovePidOut1 >3.5) g_fMPU6050YawMovePidOut1 =3.5;//进行限幅
if(g_fMPU6050YawMovePidOut1 <0) g_fMPU6050YawMovePidOut1 =0;
if(g_fMPU6050YawMovePidOut2 >3.5) g_fMPU6050YawMovePidOut2 =3.5;
if(g_fMPU6050YawMovePidOut2 <0) g_fMPU6050YawMovePidOut2 =0;
motorPidSetSpeed(g_fMPU6050YawMovePidOut1,g_fMPU6050YawMovePidOut2);
然后调节PID参数
顺序 先确定P 正负 然后P大小
然后D正负 然后D大小
最后调节的参数如下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DKAKCE3C-1675083353131)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110170011105.png)]
pidMPU6050YawMovement.Kp=0.02;//6050航向角PID运动控制
pidMPU6050YawMovement.Ki=0;
pidMPU6050YawMovement.Kd=0.1;
然后我们把小车放在地上就可以完成一直朝着初始方向前进,如果往侧面推也会马上矫正。
转弯90度功能(控制转弯角度)
然后我们增加一下,如何旋转90度程序
在串口接收回调函数表姿态PID的目标值
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-pfllo7FK-1675083353132)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110184914912.png)]
extern tPid pidMPU6050YawMovement; //利用6050偏航角 进行姿态控制的PID
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AN5115TH-1675083353132)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230110185214565.png)]
if(g_ucUsart3ReceiveData == 'H')//转向90度
{
if(pidMPU6050YawMovement.target_val <= 180)pidMPU6050YawMovement.target_val += 90;//目标值
}
if(g_ucUsart3ReceiveData == 'I')//转回90度
{
if(pidMPU6050YawMovement.target_val >= -180)pidMPU6050YawMovement.target_val -= 90;//目标值
}
然后我们的蓝牙APP增加两个发送按钮的设置
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-t8h0SDdV-1675083353133)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221117224841058.png)]
现象 是上电小车向初始方向直行,如果推小车车头方向,小车能够立马矫正。
然后连接蓝牙发送转90度 小车会转90度,按下 转回90度小车回转回。
第18章-综合以上功能
18-按键和app按钮切换功能
根据上面介绍,我们的模式可以有:
**OLED显示模式: 速度、里程、电压、超声波数据、MPU6050俯仰角、横滚角、航向角 数据显示在OLED上和通过串口发送蓝牙APP **
PID循迹模式:红外对管PID循迹
手机遥控普通运动模式:遥控前、后、左、右加速运动
超声波避障模式
PID跟随模式:超声波PID定距离跟随
手机遥控角度闭环模式:MPU6050角度PID控制
可以设置标志位通过按键改变标志位,以实现功能切换。
定义一个全局变量,
uint8_t g_ucMode = 0;
//小车运动模式标志位 0:显示功能、1:PID循迹模式、2:手机遥控普通运动模式、3.超声波避障模式、4:PID跟随模式、5:遥控角度闭环
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vBhwFRLJ-1675083353133)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111120620970.png)]
uint8_t g_ucMode = 0; //小车运动模式标志位
在gpio.h声明一下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bnHysAI8-1675083353134)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111120725049.png)]
extern uint8_t g_ucMode ; //小车运动模式标志位
按键中断回调函数里面补充按下按键后的处理
先不进行消抖,如果后面KEY1 KEY2效果不好再消抖
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rl6JVWv4-1675083353134)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111123626386.png)]
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin) //判断一下那个引脚触发中断
{
//这里编写触发中断后要执行的程序
if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5
else
{
g_ucMode+=1;
}
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
if(GPIO_Pin == KEY2_Pin) //判断一下那个引脚触发中断
{
//这里编写触发中断后要执行的程序
g_ucMode=0;
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
}
然后主函数显示当前处于的模式
然后判断当前模式 执行不同代码
方法:一个功能一个功能的添加代码,添加好一个调试测试一下,然后再添加下一个
下面这个就是我们主函数的代码。
sprintf((char *)OledString," g_ucMode:%d",g_ucMode);//显示g_ucMode 当前模式
OLED_ShowString(0,6,OledString,12); //显示在OLED上
sprintf((char *)Usart3String," g_ucMode:%d",g_ucMode);//蓝牙APP显示
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
if(g_ucMode == 0)
{
//0LED显示功能
sprintf((char*)OledString, "V1:%.2fV2:%.2f", Motor1Speed,Motor2Speed);//显示速度
OLED_ShowString(0,0,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
sprintf((char*)OledString, "Mileage:%.2f", Mileage);//显示里程
OLED_ShowString(0,1,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
sprintf((char*)OledString, "U:%.2fV", adcGetBatteryVoltage());//显示电池电压
OLED_ShowString(0,2,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
sprintf((char *)OledString,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据
OLED_ShowString(0,3,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
sprintf((char *)OledString,"p:%.2f r:%.2f \r\n",pitch,roll);//显示6050数据 俯仰角 横滚角
OLED_ShowString(0,4,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
sprintf((char *)OledString,"y:%.2f \r\n",yaw);//显示6050数据 航向角
OLED_ShowString(0,5,OledString,12);//这个是oled驱动里面的,是显示位置的一个函数,
//蓝牙APP显示
sprintf((char*)Usart3String, "V1:%.2fV2:%.2f", Motor1Speed,Motor2Speed);//显示速度
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
//阻塞方式发送可以保证数据发送完毕,中断发送不一定可以保证数据已经发送完毕才启动下一次发送
sprintf((char*)Usart3String, "Mileage:%.2f", Mileage);//显示里程
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char*)Usart3String, "U:%.2fV", adcGetBatteryVoltage());//显示电池电压
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"p:%.2f r:%.2f \r\n",pitch,roll);//显示6050数据 俯仰角 横滚角
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
sprintf((char *)Usart3String,"y:%.2f \r\n",yaw);//显示6050数据 航向角
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),50);//阻塞式发送通过串口三输出字符 strlen:计算字符串大小
//获得6050数据
while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题
//显示模式电机停转
motorPidSetSpeed(0,0);
}
if(g_ucMode == 1)
{
///**** 红外PID循迹功能******************/
g_ucaHW_Read[0] = READ_HW_OUT_1;//读取红外对管状态、这样相比于写在if里面更高效
g_ucaHW_Read[1] = READ_HW_OUT_2;
g_ucaHW_Read[2] = READ_HW_OUT_3;
g_ucaHW_Read[3] = READ_HW_OUT_4;
if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
// printf("应该前进\r\n");//注释掉更加高效,减少无必要程序执行
g_cThisState = 0;//前进
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )//使用else if更加合理高效
{
// printf("应该右转\r\n");
g_cThisState = -1;//应该右转
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
// printf("快速右转\r\n");
g_cThisState = -2;//快速右转
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0)
{
// printf("快速右转\r\n");
g_cThisState = -3;//快速右转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 0 )
{
// printf("应该左转\r\n");
g_cThisState = 1;//应该左转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 1 )
{
// printf("快速左转\r\n");
g_cThisState = 2;//快速左转
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 1)
{
// printf("快速左转\r\n");
g_cThisState = 3;//快速左转
}
g_fHW_PID_Out = PID_realize(&pidHW_Tracking,g_cThisState);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fHW_PID_Out1 = 3 + g_fHW_PID_Out;//电机1速度=基础速度+循迹PID输出速度
g_fHW_PID_Out2 = 3 - g_fHW_PID_Out;//电机1速度=基础速度-循迹PID输出速度
if(g_fHW_PID_Out1 >5) g_fHW_PID_Out1 =5;//进行限幅 限幅速度在0-5之间
if(g_fHW_PID_Out1 <0) g_fHW_PID_Out1 =0;
if(g_fHW_PID_Out2 >5) g_fHW_PID_Out2 =5;
if(g_fHW_PID_Out2 <0) g_fHW_PID_Out2 =0;
if(g_cThisState != g_cLastState)//如何这次状态不等于上次状态、就进行改变目标速度和控制电机、在定时器中依旧定时控制电机
{
motorPidSetSpeed(g_fHW_PID_Out1,g_fHW_PID_Out2);//通过计算的速度控制电机
}
g_cLastState = g_cThisState;//保存上次红外对管状态
}
if(g_ucMode == 2)
{
//***************遥控模式***********************//
//遥控模式的控制在串口三的中断里面
}
if(g_ucMode == 3)
{
//******超声波避障模式*********************//
避障逻辑
if(HC_SR04_Read() > 25)//前方无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{ //前方有障碍物
motorPidSetSpeed(-1,1);//右边运动 原地
HAL_Delay(500);
if(HC_SR04_Read() > 25)//右边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{//右边有障碍物
motorPidSetSpeed(1,-1);//左边运动 原地
HAL_Delay(1000);
if(HC_SR04_Read() >25)//左边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{
motorPidSetSpeed(-1,-1);//后运动
HAL_Delay(1000);
motorPidSetSpeed(-1,1);//右边运动
HAL_Delay(50);
}
}
}
}
if(g_ucMode == 4)
{
//**********PID跟随功能***********//
g_fHC_SR04_Read=HC_SR04_Read();//读取前方障碍物距离
if(g_fHC_SR04_Read < 60){ //如果前60cm 有东西就启动跟随
g_fFollow_PID_Out = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID计算输出目标速度 这个速度,会和基础速度加减
if(g_fFollow_PID_Out > 6) g_fFollow_PID_Out = 6;//对输出速度限幅
if(g_fFollow_PID_Out < -6) g_fFollow_PID_Out = -6;
motorPidSetSpeed(g_fFollow_PID_Out,g_fFollow_PID_Out);//速度作用与电机上
}
else motorPidSetSpeed(0,0);//如果前面60cm 没有东西就停止
HAL_Delay(10);//读取超声波传感器不能过快
}
if(g_ucMode == 5)
{
//*************MPU6050航向角 PID转向控制*****************//
sprintf((char *)Usart3String,"pitch:%.2f roll:%.2f yaw:%.2f\r\n",pitch,roll,yaw);//显示6050数据 俯仰角 横滚角 航向角
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小
//mpu_dmp_get_data(&pitch,&roll,&yaw);//返回值:0,DMP成功解出欧拉角
while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){} //这个可以解决经常读不出数据的问题
g_fMPU6050YawMovePidOut = PID_realize(&pidMPU6050YawMovement,yaw);//PID计算输出目标速度 这个速度,会和基础速度加减
g_fMPU6050YawMovePidOut1 = 1.5 + g_fMPU6050YawMovePidOut;//基础速度加减PID输出速度
g_fMPU6050YawMovePidOut2 = 1.5 - g_fMPU6050YawMovePidOut;
if(g_fMPU6050YawMovePidOut1 >3.5) g_fMPU6050YawMovePidOut1 =3.5;//进行限幅
if(g_fMPU6050YawMovePidOut1 <0) g_fMPU6050YawMovePidOut1 =0;
if(g_fMPU6050YawMovePidOut2 >3.5) g_fMPU6050YawMovePidOut2 =3.5;
if(g_fMPU6050YawMovePidOut2 <0) g_fMPU6050YawMovePidOut2 =0;
motorPidSetSpeed(g_fMPU6050YawMovePidOut1,g_fMPU6050YawMovePidOut2);
}
可以测试上面的代码 然后没有问题后,我们添加一个通过蓝牙APP按钮切换模式代码
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GK6PBtTL-1675083353134)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111135256610.png)]
if(g_ucUsart3ReceiveData == 'J') //改变模式
{
if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5
else
{
g_ucMode+=1;
}
}
if(g_ucUsart3ReceiveData == 'K') g_ucMode=0;//设置为显示模式
然后对应APP也要添加 按钮设置

我们
按键没有消抖效果不好,我们消抖一下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CXVpEaP3-1675083353135)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111161916819.png)]
我们增加了 HAL延时和再次判断电平
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin) //判断一下那个引脚触发中断
{
HAL_Delay(10);//延时消抖 主要
if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_SET)//判断KEY1引脚仍为高电平
{
//这里编写触发中断后要执行的程序
if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5
else
{
g_ucMode+=1;
}
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
}
if(GPIO_Pin == KEY2_Pin) //判断一下那个引脚触发中断
{
HAL_Delay(10);//延时消抖
if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)//判断KEY2引脚仍为低电平
{
//这里编写触发中断后要执行的程序
g_ucMode=0;
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
}
}
但是测试不能执行中断,程序异常卡死了
原因是HAL_Delay使用的是sysTick 中断优先级在软件初始化是默认最低的,比外部中断优先级低,所以HAL_Delay不能在外部中断服务函数中调用。
所以我们可以通过提高sysTick 中断的优先级,提高的比HAL_Delay高。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gWf0yJty-1675083353135)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111205153163.png)]
然后我们提高至 如下图
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CiPqZrwO-1675083353136)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20230111184656982.png)]
然后编译烧录测试按键是否更加稳定。
以上是应用篇
下面19是扩展
第22章-小车如何查找异常问题
前面我们已经移植 好了OLED程序,下面我们就直接使用OLED,我们在定时器刷新OLED,我们50ms执行一次
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8IIQcoaW-1675083353136)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108162446208.png)]
应该这样写
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BVHWDbf2-1675083353136)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108190207208.png)]
显示行进路程累计
但是发现计算不准确,怀疑中断时间不准确,如何确定中断是否按时到达那?
- 使用sysTick统计时间
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bl6GSFDT-1675083353137)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108193053984.png)]
- 在要判断时间的地方反转GPIO通过示波器观察 是否按时中断
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HHmUvIFx-1675083353137)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108194432504.png)]
然后示波器测量引脚PC13
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-m26i8ty8-1675083353137)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108194541853.png)]
所以调试发现
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5p2gBauB-1675083353138)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108194818938.png)]
所以更新显示应该放到主函数执行,然后
我们的中断函数这样写
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1HO1l4Vs-1675083353138)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108203833681.png)]
if(EncoderTimer_Count%10 == 0) //每20ms 进入一次
{
//进行PID计算、然后作用于电机
Motor_Set(PID_realize(&pid1_speed,Motor1_Speed),PID_realize(&pid2_speed,Motor2_Speed));
//向上位机发送数据
ANO_DT_Send_F2(Motor1_Speed*100, 3.0*100,Motor2_Speed*100,3.0*100);
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
/*里程数 += 时间周期(s)*车轮转速(转/s)*车轮周长(cm)*/
Mileage += 0.02*Motor1_Speed*22;
EncoderTimer_Count = 0; //清空计数值
}
然后主函数刷新
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-c5fuRSkT-1675083353139)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221108203929170.png)]
sprintf((char *)string,"V1:%.2fV2:%.2f ",Motor1_Speed,Motor2_Speed);//显示两个电机转速 单位:转/秒
OLED_ShowString(0,0,string,12);
sprintf((char *)string,"Mileage%.2f ",Mileage);//显示两个电机转速 单位:转/秒
OLED_ShowString(0,1,string,12);
一些测试中的坑
DAP识别芯片无法烧录
使用这个DAP无法下载这个淘宝核心板
点击下载出现这个报错
Not a genuine ST Device! Abort connection
https://blog.csdn.net/chunquqiulailll/article/details/113257923
如果这里识别为
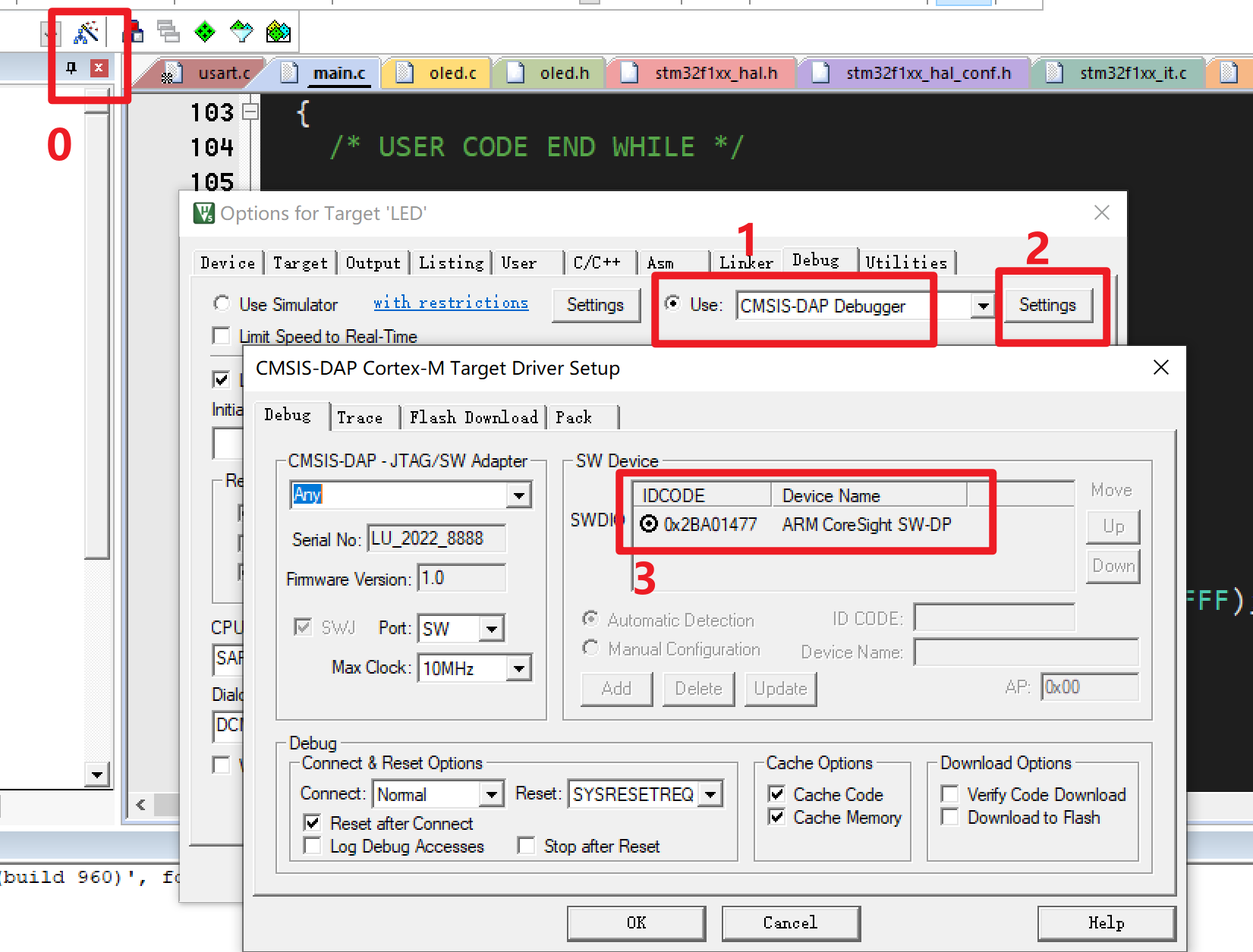
安装过程芯片支持包
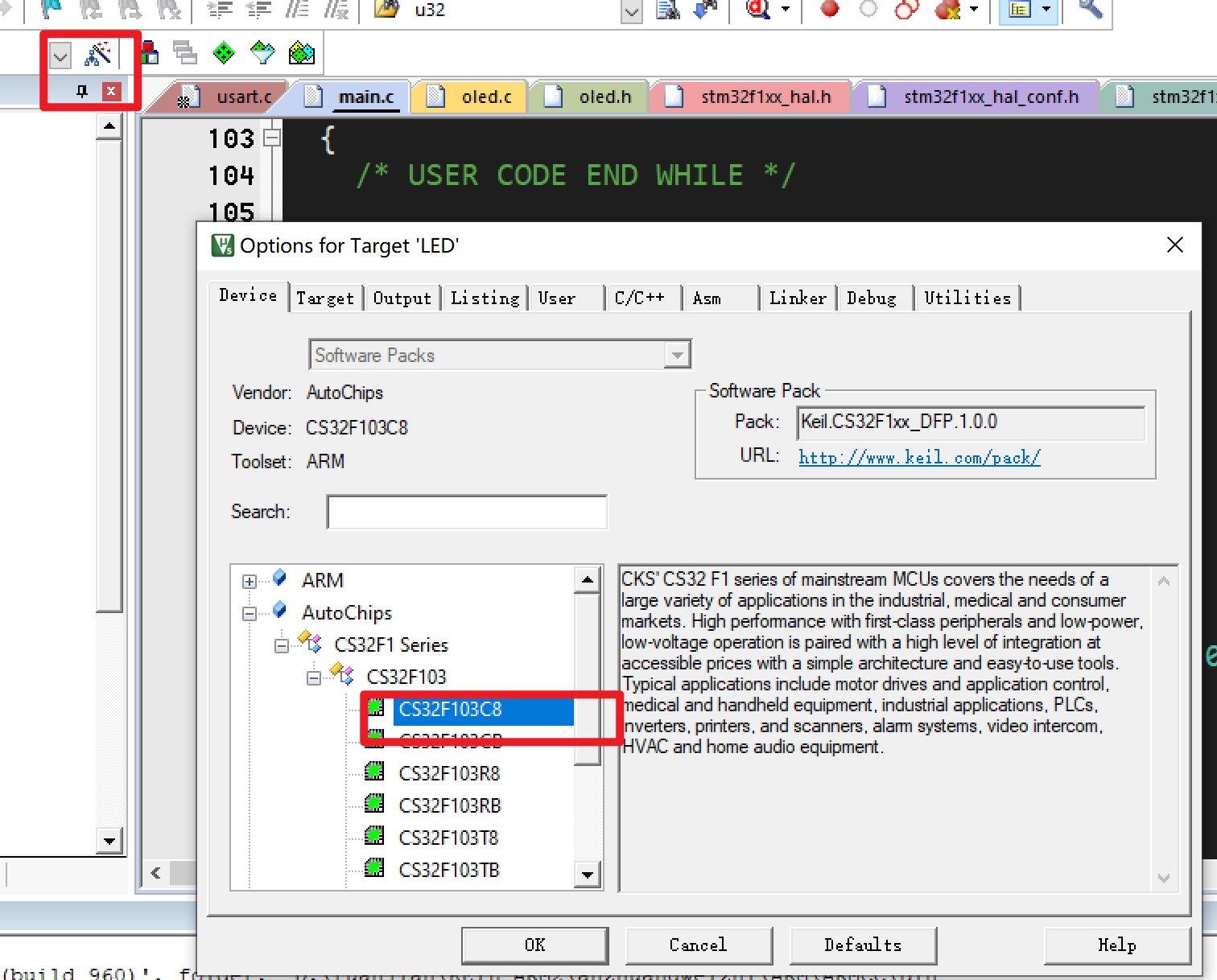
这里就会自动切换
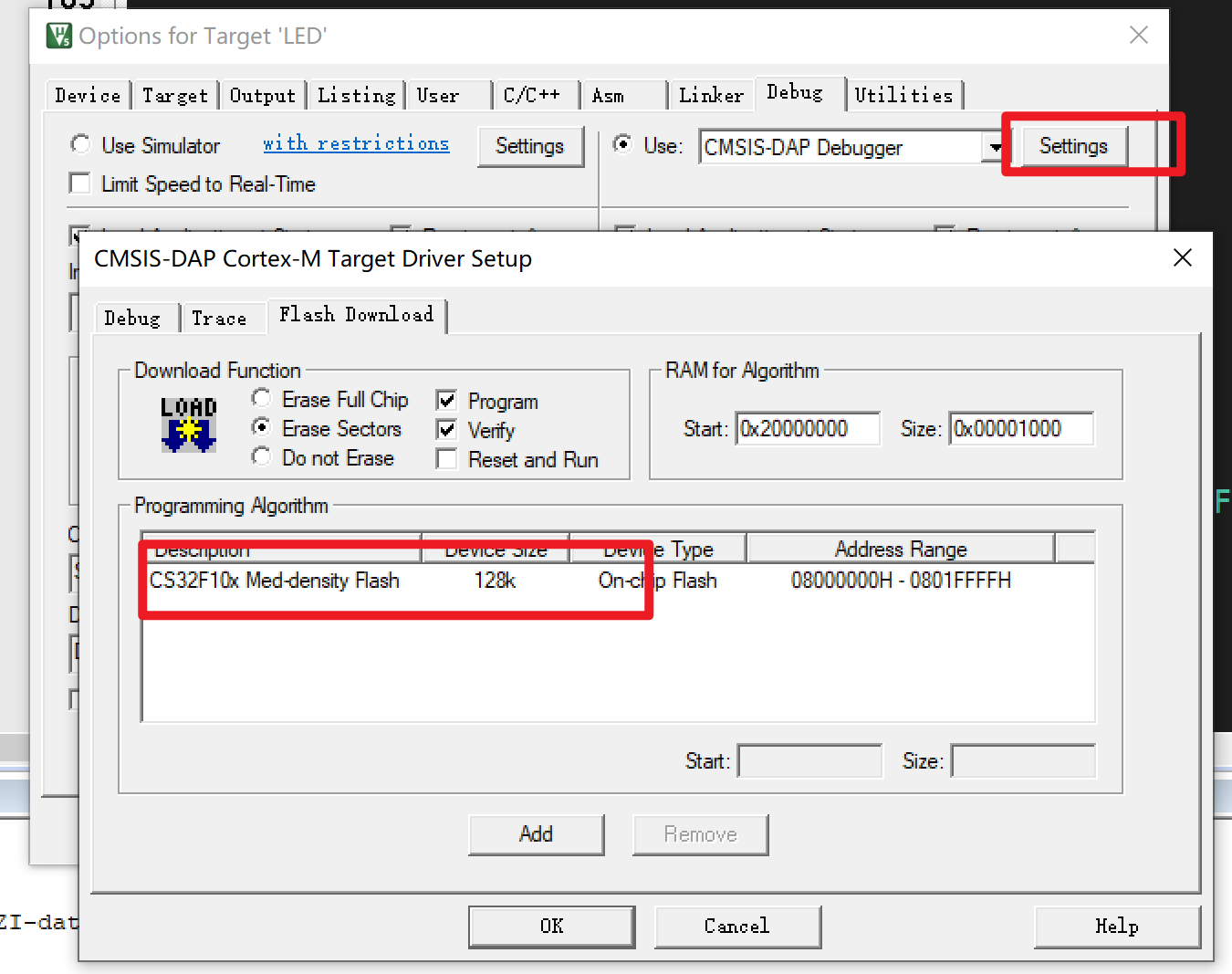
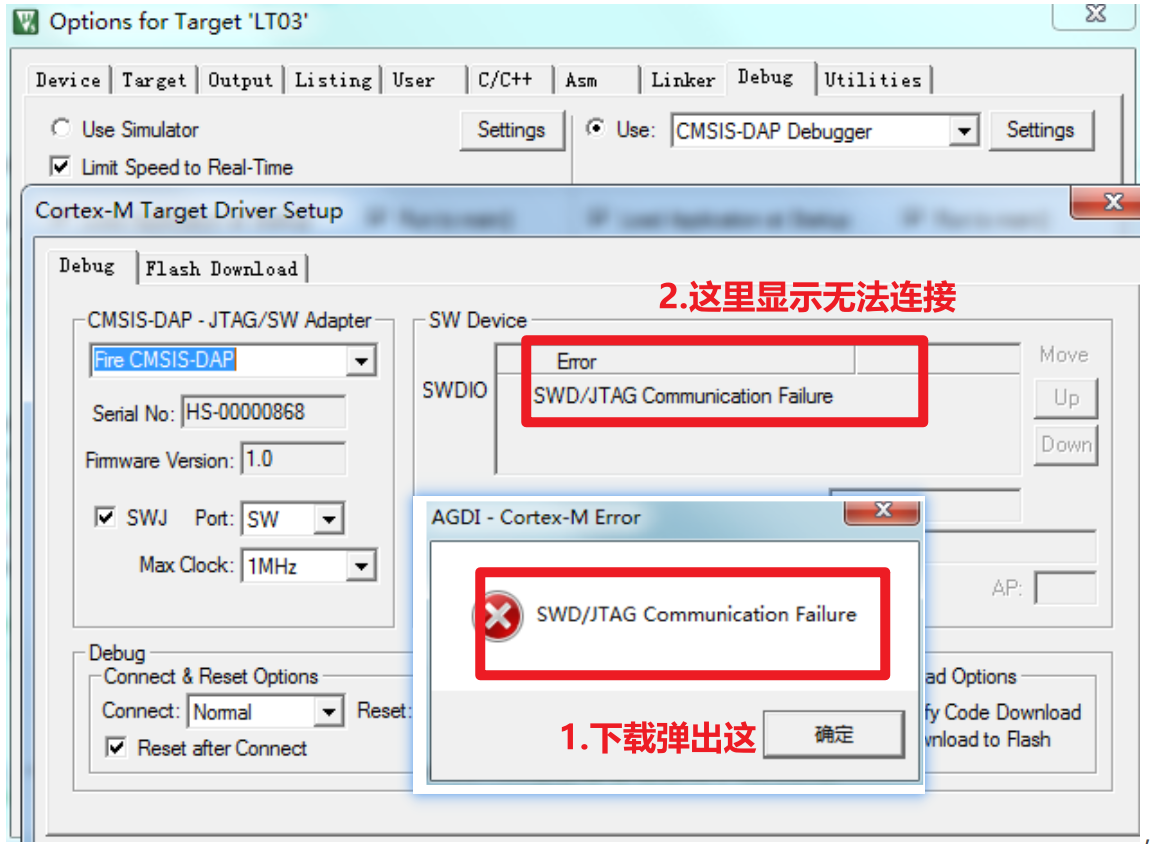 DAP无法识别芯片
DAP无法识别芯片
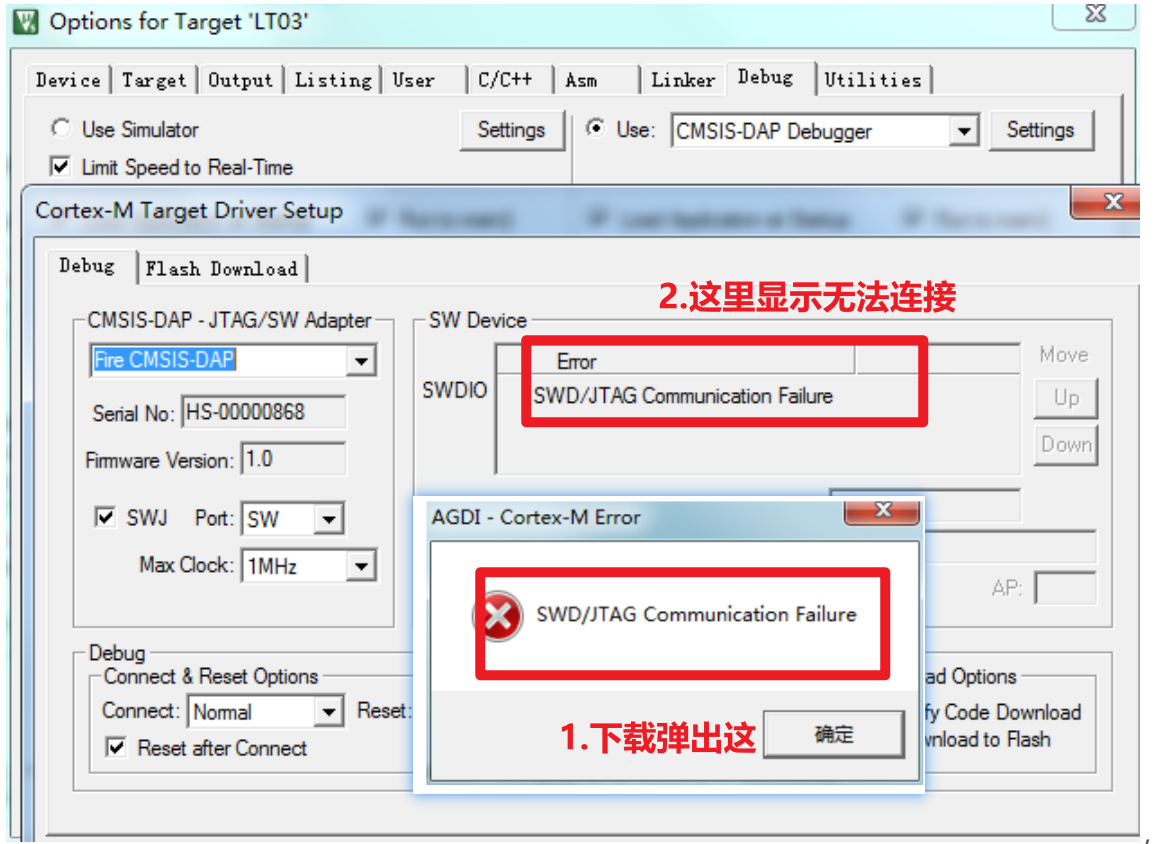
解决方法:
断电,将板子上的BOOT0用短路帽接入3.3V高电平,重新插入DAP,不出意外可见程序烧录成功,此时将BOOT0接回低电平,后续烧录程序便不会出现SWD/JTAG Communication Failure
一个DAP可以问题记录
烧录代码(烧录时候、断掉电池供电、使用DAP给单片机供电)
stlink下载程序
下载程序出现错误
Debugger - Cortex-M ErrorCannot access target.Shutting down debug session.
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qeAnDw8q-1675083353144)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116175748401.png)]
取消这个勾选、然后编译
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gfdItLCx-1675083353144)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116180051024.png)]
然后编译一下
然后再改回来
反复勾选、编译、取消勾选,然后编译,就可以下载了。
然后我勾选这,就可以下载了
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Wix52Z2S-1675083353151)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221116213433686.png)]
说更新最新的支持包试试
https://www.keil.com/dd2/Pack/#!#eula-container

其他的记录
细分更多、注意那么电机占空比控制函数也要变化
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fVss3ssR-1675083353152)(https://hjhvcc.oss-cn-nanjing.aliyuncs.com/img/image-20221210172627483.png)]
O_Port, KEY1_Pin) == GPIO_PIN_SET)//判断KEY1引脚仍为高电平
{
//这里编写触发中断后要执行的程序
if(g_ucMode == 5) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5
else
{
g_ucMode+=1;
}
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
}
if(GPIO_Pin == KEY2_Pin) //判断一下那个引脚触发中断
{
HAL_Delay(10);//延时消抖
if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)//判断KEY2引脚仍为低电平
{
//这里编写触发中断后要执行的程序
g_ucMode=0;
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
}
}
但是测试不能执行中断,程序异常卡死了
原因是HAL_Delay使用的是sysTick 中断优先级在软件初始化是默认最低的,比外部中断优先级低,所以HAL_Delay不能在外部中断服务函数中调用。
所以我们可以通过提高sysTick 中断的优先级,提高的比HAL_Delay高。
[外链图片转存中...(img-gWf0yJty-1675083353135)]
然后我们提高至 如下图
[外链图片转存中...(img-CiPqZrwO-1675083353136)]
然后编译烧录测试按键是否更加稳定。
# 以上是应用篇
# 下面19是扩展
# 第22章-小车如何查找异常问题
前面我们已经移植 好了OLED程序,下面我们就直接使用OLED,我们在定时器刷新OLED,我们50ms执行一次
[外链图片转存中...(img-8IIQcoaW-1675083353136)]
应该这样写
[外链图片转存中...(img-BVHWDbf2-1675083353136)]
显示行进路程累计
但是发现计算不准确,怀疑中断时间不准确,如何确定中断是否按时到达那?
1. 使用sysTick统计时间
[外链图片转存中...(img-bl6GSFDT-1675083353137)]
2. 在要判断时间的地方反转GPIO通过示波器观察 是否按时中断
[外链图片转存中...(img-HHmUvIFx-1675083353137)]
然后示波器测量引脚PC13
[外链图片转存中...(img-m26i8ty8-1675083353137)]
所以调试发现
[外链图片转存中...(img-5p2gBauB-1675083353138)]
所以更新显示应该放到主函数执行,然后
我们的中断函数这样写
[外链图片转存中...(img-1HO1l4Vs-1675083353138)]
```c
if(EncoderTimer_Count%10 == 0) //每20ms 进入一次
{
//进行PID计算、然后作用于电机
Motor_Set(PID_realize(&pid1_speed,Motor1_Speed),PID_realize(&pid2_speed,Motor2_Speed));
//向上位机发送数据
ANO_DT_Send_F2(Motor1_Speed*100, 3.0*100,Motor2_Speed*100,3.0*100);
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
/*里程数 += 时间周期(s)*车轮转速(转/s)*车轮周长(cm)*/
Mileage += 0.02*Motor1_Speed*22;
EncoderTimer_Count = 0; //清空计数值
}
然后主函数刷新
[外链图片转存中…(img-c5fuRSkT-1675083353139)]
sprintf((char *)string,"V1:%.2fV2:%.2f ",Motor1_Speed,Motor2_Speed);//显示两个电机转速 单位:转/秒
OLED_ShowString(0,0,string,12);
sprintf((char *)string,"Mileage%.2f ",Mileage);//显示两个电机转速 单位:转/秒
OLED_ShowString(0,1,string,12);
一些测试中的坑
DAP识别芯片无法烧录
使用这个DAP无法下载这个淘宝核心板
点击下载出现这个报错
Not a genuine ST Device! Abort connection
[外链图片转存中…(img-lwYBYyDV-1675083353139)]
https://blog.csdn.net/chunquqiulailll/article/details/113257923
[外链图片转存中…(img-UW9S610t-1675083353139)]
如果这里识别为
[外链图片转存中…(img-z2UZJvZn-1675083353141)]
安装过程芯片支持包
[外链图片转存中…(img-beD2JVkw-1675083353142)]
[外链图片转存中…(img-85oUCMk7-1675083353142)]
[外链图片转存中…(img-LDPqklzS-1675083353143)]
这里就会自动切换
[外链图片转存中…(img-wS7PSgsF-1675083353143)]
[外链图片转存中…(img-butu6BIy-1675083353143)]DAP无法识别芯片
[外链图片转存中…(img-KeTX9z28-1675083353144)]
解决方法:
断电,将板子上的BOOT0用短路帽接入3.3V高电平,重新插入DAP,不出意外可见程序烧录成功,此时将BOOT0接回低电平,后续烧录程序便不会出现SWD/JTAG Communication Failure
一个DAP可以问题记录
烧录代码(烧录时候、断掉电池供电、使用DAP给单片机供电)
stlink下载程序
下载程序出现错误
Debugger - Cortex-M ErrorCannot access target.Shutting down debug session.
[外链图片转存中…(img-qeAnDw8q-1675083353144)]
取消这个勾选、然后编译
[外链图片转存中…(img-gfdItLCx-1675083353144)]
然后编译一下
然后再改回来
反复勾选、编译、取消勾选,然后编译,就可以下载了。
然后我勾选这,就可以下载了
[外链图片转存中…(img-Wix52Z2S-1675083353151)]
说更新最新的支持包试试
https://www.keil.com/dd2/Pack/#!#eula-container
其他的记录
细分更多、注意那么电机占空比控制函数也要变化
[外链图片转存中…(img-fVss3ssR-1675083353152)]