文章目录
- 前言
- 一、串口驱动框架
- 1.1 核心数据结构
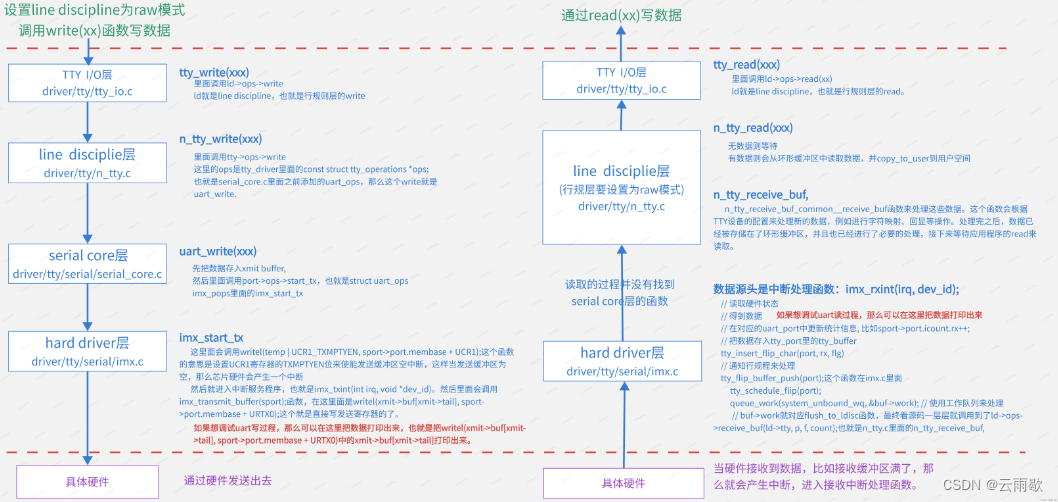
- 1.2 数据处理流程
- 二、驱动编写
- 1. 设备树的修改
- 2. 相关API函数
- 3. 驱动框架
- 4. 具体功能的实现
- 4.1 出入口函数的编写
- 4.2 读写函数
前言
之前已经讲过应用层的应用,接下来我们继续进行驱动的学习。其实实际上我们很少主动进行串口的驱动编写,通常情况下只需要进行应用层的应用就可以了,网络上相关的驱动内容介绍也较少,这里仅作了解并简单了解一下架构即可。
一、串口驱动框架
串口驱动没有什么主机端和设备端之分,就只有一个串口驱动,而且这个驱动也已经由厂商已经编写好了,我们真正要做的就是在设备树中添加所要使用的串口节点信息。当系统启动以后串口驱动和设备匹配成功,相应的串口就会被驱动起来,生成/dev/ttymxcX(X=0….n)文件。
这部分内容还是比较多的,笔者发现这个文章讲述的还是很详细的,感兴趣可以自行查阅,这里不再赘述:框架详细介绍
1.1 核心数据结构
对于串口驱动来说,实际上重要的结构体只有uart_drive和uart_port,这里可能根据不同的厂商所采用的名称不大一样,但内容差不多,比如在rk3568中,官方提供的uart驱动程序位8250通用串口程序,其为uart_port结构体提供了扩展后的uart_8250_port,包含8250 UART特有的属性和操作。
这部分内容保存于内核中的下列文件中,感兴趣可以自行查阅:
- serial_core.c:包含UART核心层的实现。
- 8250.c:包含8250 UART特定操作的实现。
- 8250_port.c:包含8250 UART端口的具体实现。
uart_driver结构体用于描述一个UART驱动程序,它通常包含一些基础的信息和操作函数。
struct uart_driver {
struct module *owner; // 设备驱动模块的所有者
const char *driver_name; // 驱动程序的名称
const char *dev_name; // 设备名称
int major; // 设备主设备号
int minor; // 设备次设备号
int nr; // 该驱动程序支持的设备数量
struct console *cons; // 控制台相关信息
struct uart_ops *ops; // UART操作函数集合
struct uart_state *state;
struct tty_driver *tty_driver;
};
uart_8250_port结构体用于描述8250 UART端口的具体信息和操作方法。
struct uart_8250_port {
struct uart_port port; // 通用UART端口结构体
struct timer_list timer; // 定时器用于处理超时
unsigned int capabilities; // 硬件能力
unsigned int mcr; // 调制解调器控制寄存器
unsigned int lsr; // 线路状态寄存器
unsigned int msr; // 调制解调器状态寄存器
unsigned int icr; // 中断控制寄存器
unsigned int lcr; // 线路控制寄存器
unsigned int fcr; // FIFO控制寄存器
unsigned int ier; // 中断使能寄存器
unsigned char mcr_mask; // 调制解调器控制寄存器掩码
unsigned char mcr_force; // 调制解调器控制寄存器强制值
unsigned char lsr_break_flag; // 断开标志
unsigned char bugs; // 硬件错误标志
unsigned int tx_loadsz; // 发送FIFO加载大小
unsigned int acr; // 额外控制寄存器
unsigned int ier_mask; // 中断使能寄存器掩码
unsigned int ier_force; // 中断使能寄存器强制值
unsigned int lsr_mask; // 线路状态寄存器掩码
unsigned int lsr_break_flag_mask; // 断开标志掩码
};
//通用结构体,但比较鸡肋
struct uart_port {
spinlock_t lock; /* port lock */
unsigned long iobase; /* in/out[bwl] */
unsigned char __iomem *membase; /* read/write[bwl] */
......
const struct uart_ops *ops;
unsigned int custom_divisor;
unsigned int line; /* port index */
unsigned int minor;
resource_size_t mapbase; /* for ioremap */
resource_size_t mapsize;
struct device *dev; /* parent device */
这里补充一下在uart_driver提到的实现控制台打印功能必须要注册的结构体console和将uart_port与对应的circ_buf联系起来的uart_state结构体。
struct console {
char name[16];
void(*write)(struct console *,const char *, unsigined);
int (*read)(struct console *, char *, unsigned);
struct tty_driver *(struct console *,int*);
void (*unblank)(void);
int (*setup)(struct console *, char *);
int (*early_setup)(void);
short flags;
short index; /*用来指定该console使用哪一个uart port (对应的uart_port中的line),如果为-1,kernel会自动选择第一个uart port*/
int cflag;
void *data;
struct console *next;
};
/*uart_state有两个成员在底层串口驱动会用到,即xmit和port。
用户空间程序通过串口发送数据时,上层驱动将用户数据保存在xmit;而串口发送中断处理函数就是通过xmit获取到用户数据并将它们发送出去。
串口接收中断处理函数需要通过port将接收到的数据传递给线路规程层。
*/
struct uart_state {
struct tty_port port;
enum uart_pm_state pm_state;
struct circ_buf xmit;
struct uart_port *uart_port; /*对应于一个串口设备*/
};
uart_ops结构体几乎涵盖了驱动可对串口的所有操作:
struct uart_ops {
unsigned int (*tx_empty)(struct uart_port *);
void (*set_mctrl)(struct uart_port *, unsigned int mctrl);
unsigned int (*get_mctrl)(struct uart_port *);
void (*stop_tx)(struct uart_port *);
void (*start_tx)(struct uart_port *);
void (*throttle)(struct uart_port *);
void (*unthrottle)(struct uart_port *);
void (*send_xchar)(struct uart_port *, char ch);
void (*stop_rx)(struct uart_port *);
void (*enable_ms)(struct uart_port *);
void (*break_ctl)(struct uart_port *, int ctl);
int (*startup)(struct uart_port *);
void (*shutdown)(struct uart_port *);
void (*flush_buffer)(struct uart_port *);
void (*set_termios)(struct uart_port *, struct ktermios *new,
struct ktermios *old);
void (*set_ldisc)(struct uart_port *, int new);
void (*pm)(struct uart_port *, unsigned int state,
unsigned int oldstate);
int (*set_wake)(struct uart_port *, unsigned int state);
/*
* Return a string describing the type of the port
*/
const char *(*type)(struct uart_port *);
/*
* Release IO and memory resources used by the port.
* This includes iounmap if necessary.
*/
void (*release_port)(struct uart_port *);
/*
* Request IO and memory resources used by the port.
* This includes iomapping the port if necessary.
*/
int (*request_port)(struct uart_port *);
void (*config_port)(struct uart_port *, int);
int (*verify_port)(struct uart_port *, struct serial_struct *);
int (*ioctl)(struct uart_port *, unsigned int, unsigned long);
#ifdef CONFIG_CONSOLE_POLL
int (*poll_init)(struct uart_port *);
void (*poll_put_char)(struct uart_port *, unsigned char);
int (*poll_get_char)(struct uart_port *);
#endif
};
1.2 数据处理流程
相较于前面学习的spi子系统和iic子系统,uart驱动通常情况不需要根据协议的时序额外编写新的传输函数,这里可以直接提供write函数和read函数实现数据的互传。
这部分的内容我们在应用层实验的时候已经详细介绍过了,感兴趣可以回顾一下。
二、驱动编写
我们这里采用的8250通用驱动,对于不同驱动其函数名称和入口参数可能有所不同,这里我们简单学习梳理一下框架即可,通常来说我们是只需要进行应用层的编写。
1. 设备树的修改
代码如下(示例):
uart3: serial@fe670000 {
compatible = "rockchip,rk3568-uart", "snps,dw-apb-uart";
reg = <0x0 0xfe670000 0x0 0x100>;
interrupts = <GIC_SPI 119 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru SCLK_UART3>, <&cru PCLK_UART3>;
clock-names = "baudclk", "apb_pclk";
reg-shift = <2>;
reg-io-width = <4>;
dmas = <&dmac0 6>, <&dmac0 7>;
pinctrl-names = "default";
pinctrl-0 = <&uart3m0_xfer>;
status = "disabled";
};
//uart3的复用
uart3 {
/omit-if-no-ref/
uart3m0_xfer: uart3m0-xfer {
rockchip,pins =
/* uart3_rxm0 */
<1 RK_PA0 2 &pcfg_pull_up>,
/* uart3_txm0 */
<1 RK_PA1 2 &pcfg_pull_up>;
};
/omit-if-no-ref/
uart3m0_ctsn: uart3m0-ctsn {
rockchip,pins =
/* uart3m0_ctsn */
<1 RK_PA3 2 &pcfg_pull_none>;
};
/omit-if-no-ref/
uart3m0_rtsn: uart3m0-rtsn {
rockchip,pins =
/* uart3m0_rtsn */
<1 RK_PA2 2 &pcfg_pull_none>;
};
/omit-if-no-ref/
uart3m1_xfer: uart3m1-xfer {
rockchip,pins =
/* uart3_rxm1 */
<3 RK_PC0 4 &pcfg_pull_up>,
/* uart3_txm1 */
<3 RK_PB7 4 &pcfg_pull_up>;
};
};
接着根据我们的需要继续编写即可,泰山派这里已经默认将uart3配置好了,这里可以直接调用。
//用户串口3
&uart3 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&uart3m1_xfer>;
...
};
2. 相关API函数
//注册 uart_driver
int uart_register_driver(struct uart_driver *drv)
- 参数
- drv :要注册的 uart_driver
- 返回值
- 成功:0
- 失败:负值
//注销uart_driver
void uart_unregister_driver(struct uart_driver *drv)
- 参数
- drv :要注销的 uart_driver
- 返回值:无
//
int serial8250_register_8250_port(struct uart_8250_port *up);
- 参数
- up:指向 uart_8250_port 结构体的指针,该结构体包含了要注册的 8250 UART 端口的所有必要信息。
- 返回值
- 成功:端口的线路号(line)
- 失败:错误码
void serial8250_unregister_port(int line);
- 参数
- line:要注销的 UART 端口的线路号(line),通常是在调用 serial8250_register_8250_port 时返回的值。
- 返回值:无
3. 驱动框架
实际上,我们可以简单地将uart驱动理解为是一个 platform 驱动在驱动入口函数中调用uart_register_driver 函数向 Linux 内核注册 uart_driver,在驱动出口函数中调用uart_unregister_driver 函数注销掉前面注册的 uart_driver,当设备和驱动匹配成功以后进入probe 函数,此函数的重点工作就是初始化uart_8250_port(uart_port),然后将其添加到对应的uart_driver 中。在初始化uart_port过程中,设置 uart_ops 为对应的 XXX_ops即可。
4. 具体功能的实现
4.1 出入口函数的编写
static int __init my_uart_init(void)
{
int ret;
// 初始化uart_driver结构体
my_uart_driver = (struct uart_driver) {
.owner = THIS_MODULE,
.driver_name= DRIVER_NAME,
.dev_name = "ttyMY",
.major = TTY_MAJOR,
.minor = 64,
.nr = 1,
};
// 注册UART驱动
ret = uart_register_driver(&my_uart_driver);
if (ret)
return ret;
// 初始化uart_8250_port结构体
my_uart_port.port = (struct uart_port) {
.iotype = UPIO_PORT,
.mapbase = UART_BASE,
.irq = UART_IRQ,
.uartclk = UART_CLOCK,
.fifosize = 16,
.ops = &my_uart_ops,
.line = 0,
};
// 注册8250 UART端口
line = serial8250_register_8250_port(&my_uart_port);
if (line)
uart_unregister_driver(&my_uart_driver);
return line;
}
static void __exit my_uart_exit(void)
{
serial8250_unregister_port(line);
uart_unregister_driver(&my_uart_driver);
}
module_init(my_uart_init);
module_exit(my_uart_exit);
4.2 读写函数
static void my_uart_start_tx(struct uart_port *port)
{
struct uart_8250_port *up = (struct uart_8250_port *)port;
unsigned int ier;
spin_lock_irq(&up->port.lock);
// 启用发送中断
ier = serial_in(up, UART_IER);
serial_out(up, UART_IER, ier | UART_IER_THRI);
spin_unlock_irq(&up->port.lock);
}
static void my_uart_stop_tx(struct uart_port *port)
{
struct uart_8250_port *up = (struct uart_8250_port *)port;
unsigned int ier;
spin_lock_irq(&up->port.lock);
// 禁用发送中断
ier = serial_in(up, UART_IER);
serial_out(up, UART_IER, ier & ~UART_IER_THRI);
spin_unlock_irq(&up->port.lock);
}
static irqreturn_t my_uart_interrupt(int irq, void *dev_id)
{
struct uart_8250_port *up = dev_id;
unsigned int iir = serial_in(up, UART_IIR);
// 检查中断类型并处理
if (!(iir & UART_IIR_NO_INT)) {
if (iir & UART_IIR_RDI)
serial8250_rx_chars(up);
if (iir & UART_IIR_THRI)
serial8250_tx_chars(up);
return IRQ_HANDLED;
}
return IRQ_NONE;
}
免责声明:本内容部分参考野火科技及其他相关公开资料,若有侵权或者勘误请联系作者。