双目立体匹配工作--2022年度
- 总述
- 投影几何
- 标定
- 单目标定
- 双目标定
- 校正
- 立体匹配
- 传统方法
- 深度学习方法
- 合理的创建标题,有助于目录的生成
- 如何改变文本的样式
总述
投影几何
标定

摄像机参数:一般一共15个相关参数:
(1)外参数6个:旋转3个参数;平移3个参数;
(2)内参数4个:fx,fy,cx,cy;
求解上述10个参数的前提是先假设每次的畸变参数为0;
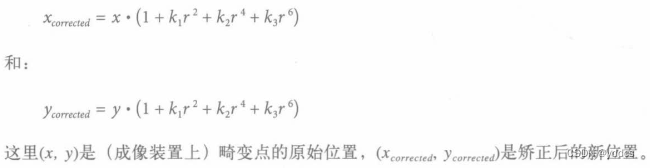
(3)5个畸变参数:k1,k2,p1,p2,k3;
其中(2)(3)为摄像机内参数,其中k3普通镜头不使用,鱼眼镜头要使用。
单目标定
本征矩阵 (Essential Matrix):
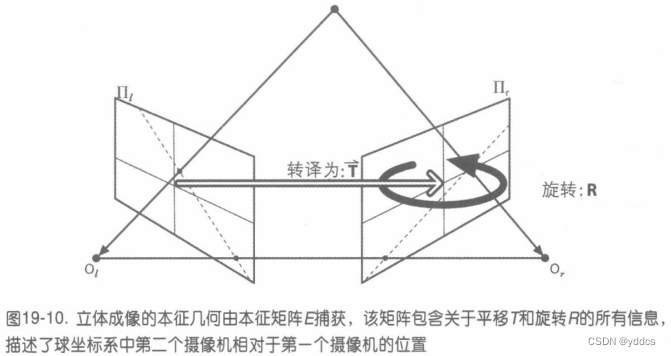
基本矩阵(Fundamental Mat):
双目标定
标定后立体校正的理想状态:
F
i
g
.
2.
Fig. 2.
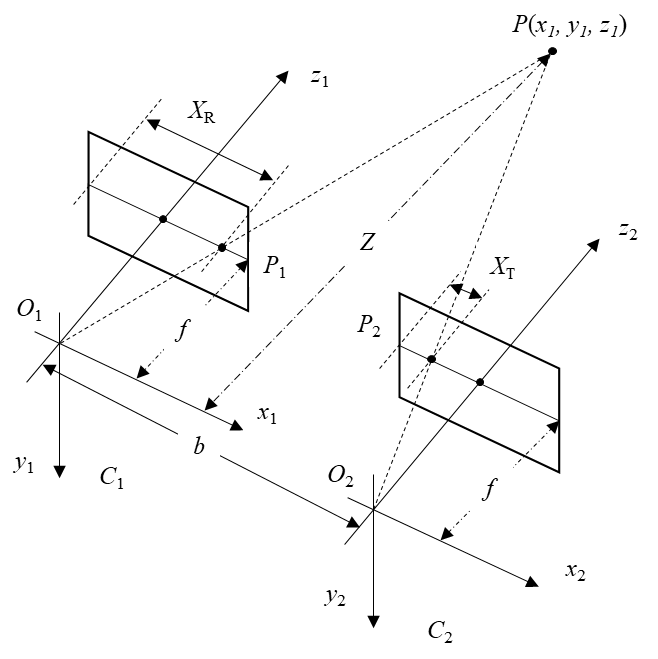
Fig.2. 双目相机测距原理图
焦距
f
f
f, 基线
B
a
s
e
l
i
n
e
(
b
)
Baseline(b)
Baseline(b)
b
Z
=
b
−
(
X
R
−
X
T
)
Z
−
f
\frac{b}{Z} = \frac{b-(X_R-X_T)}{Z-f}
Zb=Z−fb−(XR−XT) 深度Z,视差
d
d
d
Z
=
f
b
d
,
w
h
e
r
e
d
=
X
R
−
X
T
Z=\frac{fb}{d}, \quad where \quad d=X_R-X_T
Z=dfb,whered=XR−XT
注意事项:
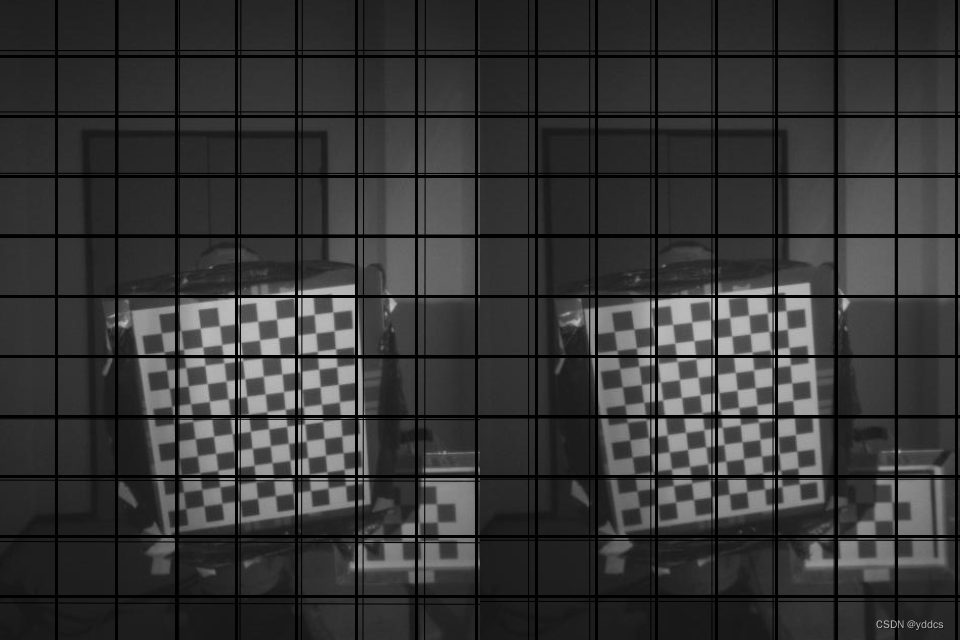
- 标定板占图像 1 / 4 − 1 / 3 1/4-1/3 1/4−1/3,标定板距离远近,各种姿态,全图覆盖,剔除误差大的图像对;
- 确定相机的视差范围(0, d d d)
校正