文章目录
- 准备工作
- 场景描述
- 训练数据集获取与训练
- 测试结论
- 测试方案
- 外机进行平移
- 外机进行旋转
- 外机即平移又旋转
- 该螺纹孔位置
准备工作
场景描述
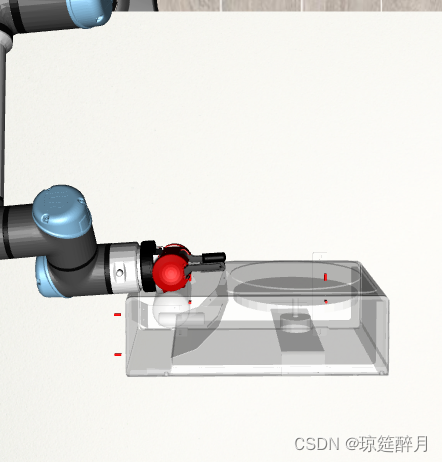
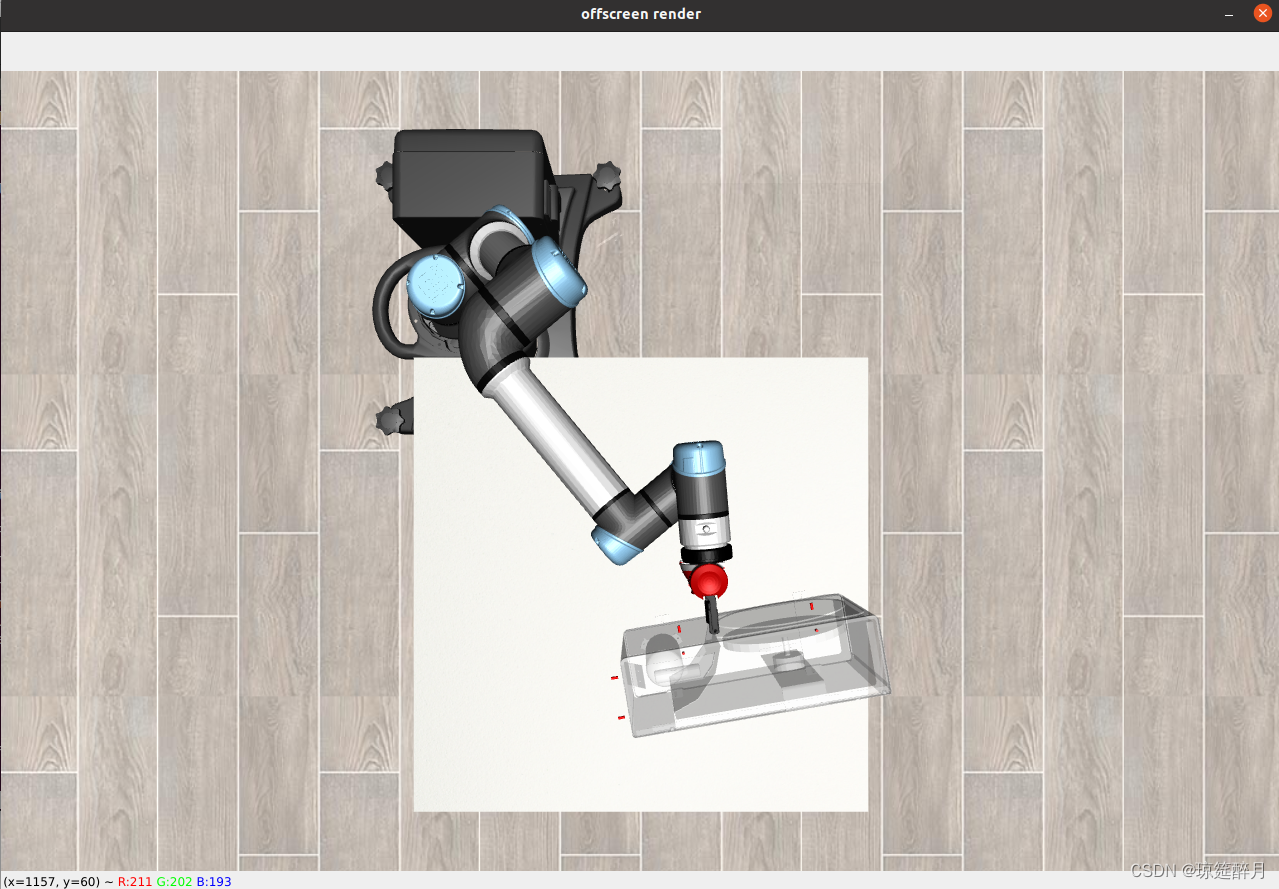
场景搭建如下如所示:
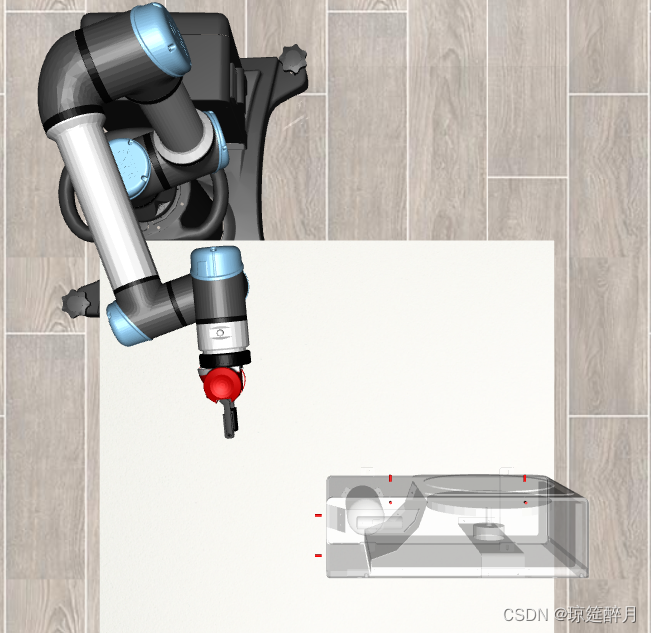
在该场景中,将机器人安置在桌子左上角处(以面对显示器的视野),空调外机在右下角的一定范围内摆放;
训练数据集获取与训练
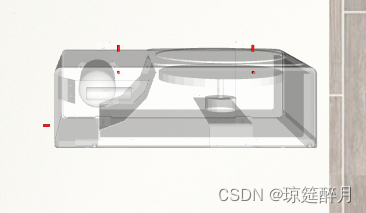
目标物:分别为正面和侧面距离最近的两个螺纹孔
训练数据集:分别构建两个外机模型,目标hole的位姿是不同的,然后随机选择其中一个模型,进行训练轨迹的收集;
数据集规模:一共收集了39组示教数据(总共执行了200次,只收集到了39组成功的数据)
训练结果:以训练评估结果分析,成功率在90%左右
测试结论
| 序号 | 测试项 | 成功率 |
|---|---|---|
| 0 | 物体在桌面内只进行平移 | 13/20 |
| 1 | 物体在桌面内只进行旋转 | 0/20 |
| 2 | 物体即进行平移又进行旋转 | / |
| 3 | 外机尺寸不变,改变螺纹孔的位置 | 13/20 |
测试方案
外机进行平移
当x=[0, 0], y=[0.3, 0.4] 平移成功率93/100
当x=[-0.05, 0.0.5], y=[0.3,0.4]平移成功率92/100
x_range=[0.0, 0.0],
y_range=[0.2, 0.4],
rotation = [-1.5707, -1.5707],
侧面孔成功率9/20
x_range=[-0.05, 0.05],
y_range=[0.2, 0.4],
rotation = [-1.5707, -1.5707],
侧面孔成功率13/20
x_range=[-0.0, 0.0],
y_range=[0.2, 0.4],
rotation = [-1.5707, -1.5707],
正面孔成功率14/20
x_range=[-0.05, 0.05],
y_range=[0.2, 0.4],
rotation = [-1.5707, -1.5707],
正面孔成功率14/20
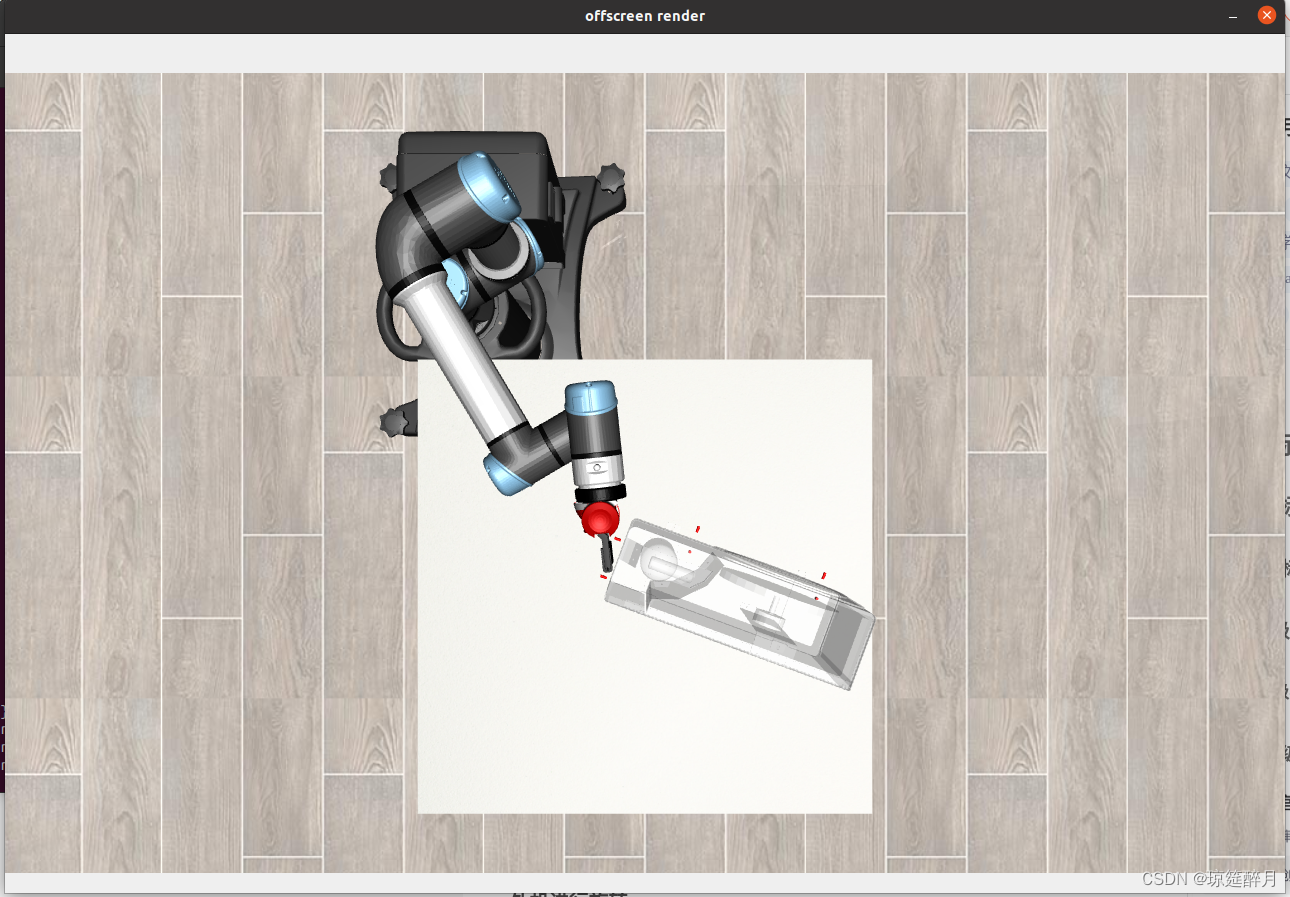
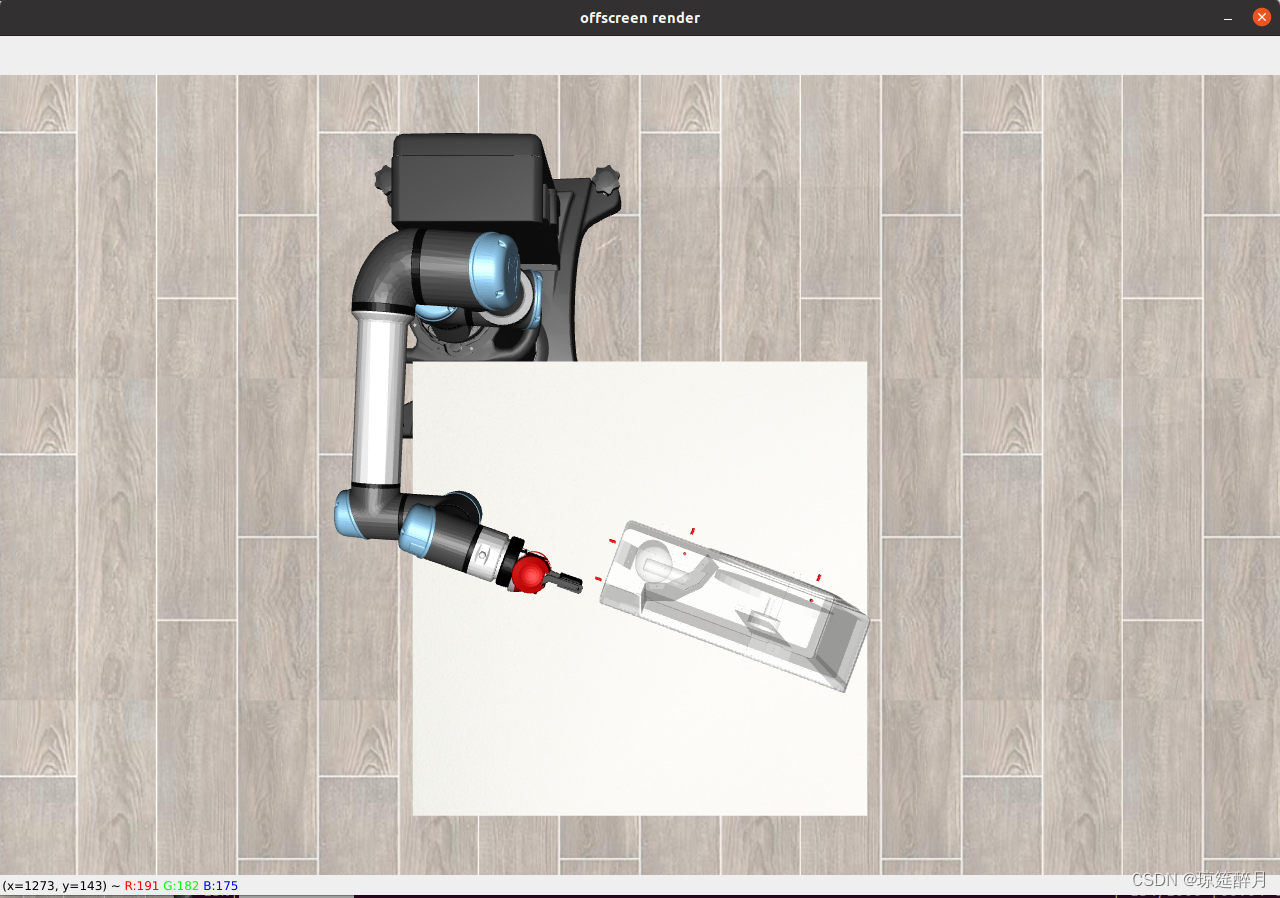
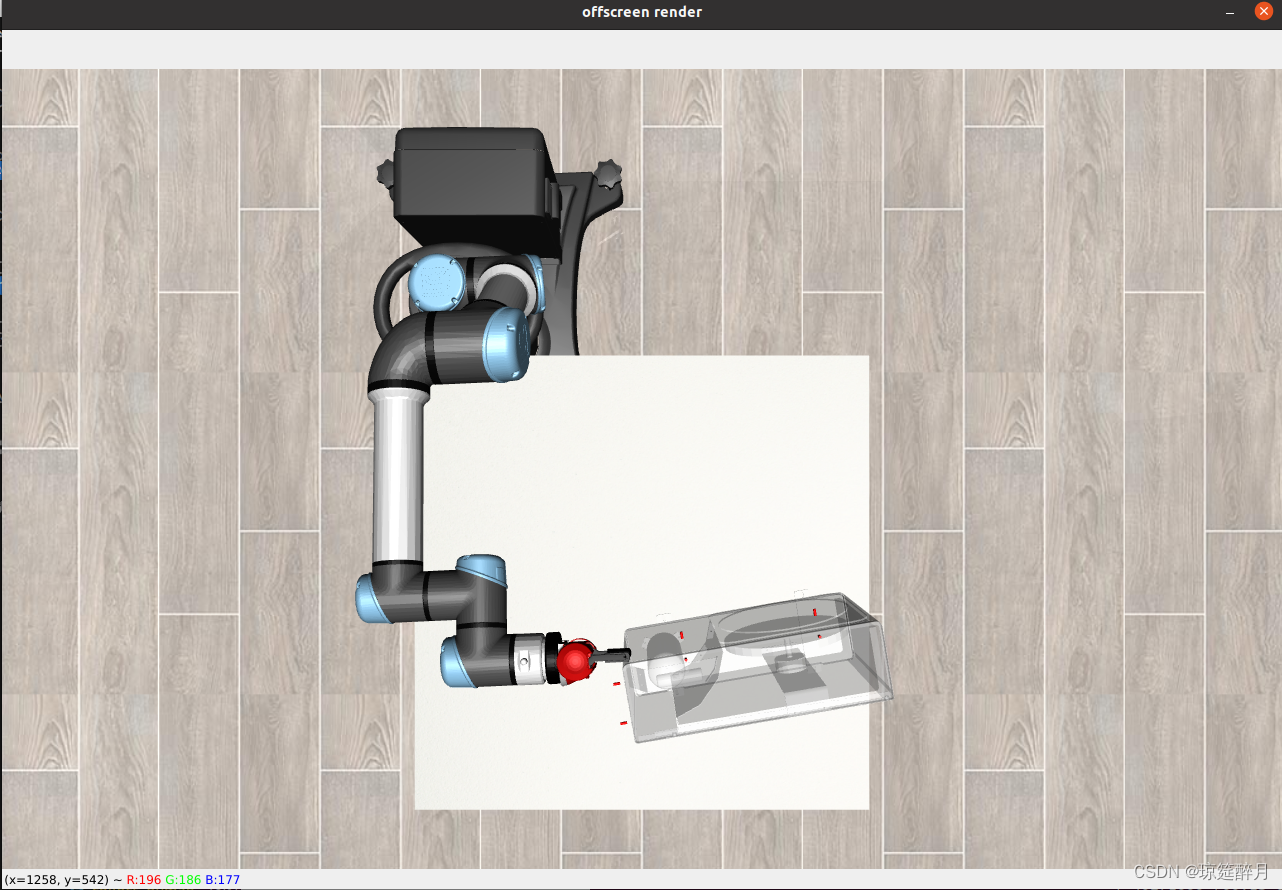
错误示意图:

外机进行旋转
旋转角度 -1.9
旋转角度 -1.4
外机即平移又旋转
只平移成功率为 0,忽略此项测试
该螺纹孔位置
外机位置变化区间:
x_range=[-0.05, 0.05],
y_range=[0.2, 0.4],
rotation = [-1.5707, -1.5707],

正面孔位位置修改后,成功率:13/20
侧面孔位位置修改后,成功率:4/20





![[职场] 护理专业简历怎么写 #经验分享#微信](https://img-blog.csdnimg.cn/img_convert/3cd09ffdc5079722ece1ad4cdd7b3a69.jpeg)