1. MTZ模型
MTZ是Miller-Tucker-Zemlin inequalities的缩写。除了定义是否用到边
x
i
j
x_{ij}
xij外,还需要定义一个
u
i
u_i
ui用来表示此时车辆的当前载货量。注意这里x变量需要定义为有向。
这里定义为pickup问题,代码为:
using JuMP, HiGHS
k = 3 # number of vehicles
N = 11 # number of points, 0 as depot
Q = 4 # vehicle capacity
q = ones(Int,N);q[1]=0 # demand
CVRP = Model(HiGHS.Optimizer)
set_silent(CVRP)
@variable(CVRP,x[1:N,1:N],Bin)
@variable(CVRP,u[1:N],lower_bound = 0, upper_bound = Q)
# 约束1:出度约束
for i in 2:N
@constraint(CVRP, sum(x[i,1:i-1]) + sum(x[i,i+1:N]) == 1)
@constraint(CVRP, sum(x[1:i-1,i]) + sum(x[i+1:N,i]) == 1)
end
@constraint(CVRP, sum(x[1,1:N]) == k)
# 约束2:流量约束。若存在i->j,则u_j-u_i==q_j;否则u_j-q_j和u_i没有关系。此外,需要有u_j-q_j>=0
for i=2:N, j=[2:i-1;i+1:N]
@constraint(CVRP,u[i] - u[j] + Q*x[i,j] <= Q-q[j])
end
for i in 2:N
@constraint(CVRP,q[i] <= u[i] <= Q)
end
@objective(CVRP,Min, sum(x[i,j]*distmat[i,j] for i=1:N,j=1:N))
@time optimize!(CVRP)
MTZ的求解速度不快,10个点3辆车都需要3秒左右时间。
2. 分支定界法
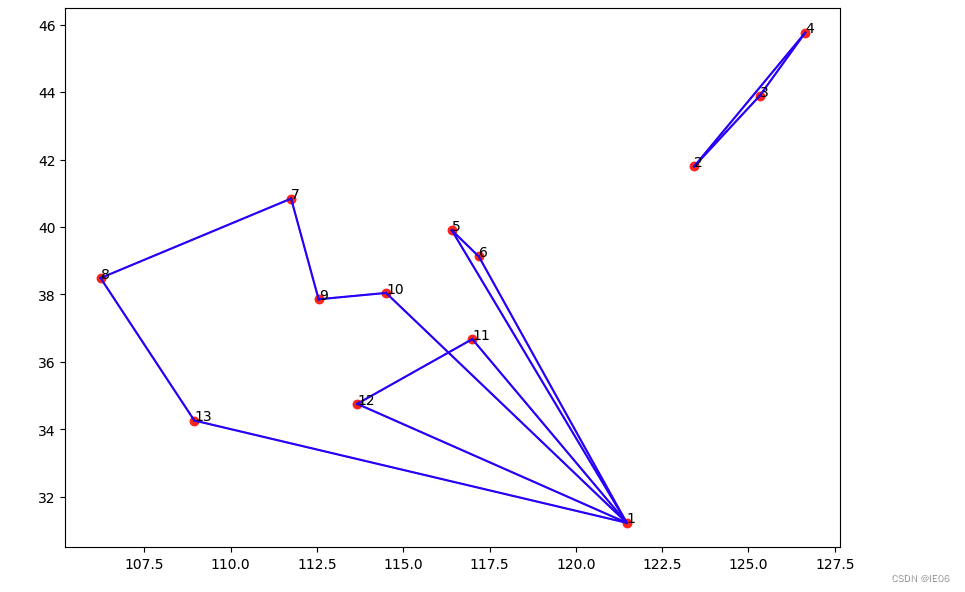
使用Two-index vehicle flow formulations。按照tsp的方式使用行生成法速度极慢(cut的效率太低),因此考虑使用branch-and-cut直接求解。需要cut的主要有2个:1)容量约束;2)subtour约束。如下例子:
using TSPLIB,JuMP, HiGHS, Distances
N = 13
Q = 4
k = 3
m = Model(HiGHS.Optimizer)
set_silent(m)
@variable(m, x[1:N,1:N]>=0,Bin)
@objective(m, Min, sum(x[i,j]*distmat[i,j] for i=1:N,j=1:N))
@constraint(m, x[1,1] == 0)
@constraint(m, sum(x[1,j] for j in 2:N) == k)
@constraint(m, sum(x[j,1] for j in 2:N) == k)
for i=2:N
for j in 1:N;@constraint(m, x[i,j]+x[j,i] <= 1);end
@constraint(m, sum(x[i,j] for j in 1:N) == 1)
@constraint(m, sum(x[j,i] for j in 1:N) == 1)
end
optimize!(m)
draw_vrp(x)
接下来定义寻找tour的函数,以及branch and cut的代码:
# find all subtours
function tours(x)
g = JuMP.value.(x)
# 第一步,找到所有从1出发的tour
abnormal_paths = []
paths = []
path = [1]
left = collect(1:N)
while true
v, idx = findmax(g[path[end],left])
if v==0
break
else
g[left[idx],path[end]]=0
g[path[end],left[idx]]=0
push!(path,left[idx])
end
if path[end]==1
if length(path)>Q+2;push!(abnormal_paths,path);end
push!(paths,path)
path = [1]
setdiff!(left,path[2:end-1])
end
end
# 第二步,找到所有孤立的环(subtour)
left = collect(1:N)
for path in paths;setdiff!(left,path);end
while length(left)>0
path = [left[1]]
while true
v, idx = findmax(g[path[end],left])
if idx == 1
break
else
g[left[idx],path[end]]=0
g[path[end],left[idx]]=0
push!(path,left[idx])
end
end
setdiff!(left,path)
push!(paths,path)
push!(abnormal_paths,path)
end
return paths,abnormal_paths
end
paths,abnormal_paths = tours(x)
while length(abnormal_paths) > 0
for path in paths
s = setdiff(path,1)
sn = setdiff(2:N,s)
@constraint(m, sum(x[i,j] for i in s, j in setdiff(1:N,s)) >= ceil(length(s)/Q))
@constraint(m, sum(x[i,j] for i in sn, j in setdiff(1:N,sn)) >= ceil(length(sn)/Q))
end
optimize!(m)
paths,abnormal_paths = tours(x)
end
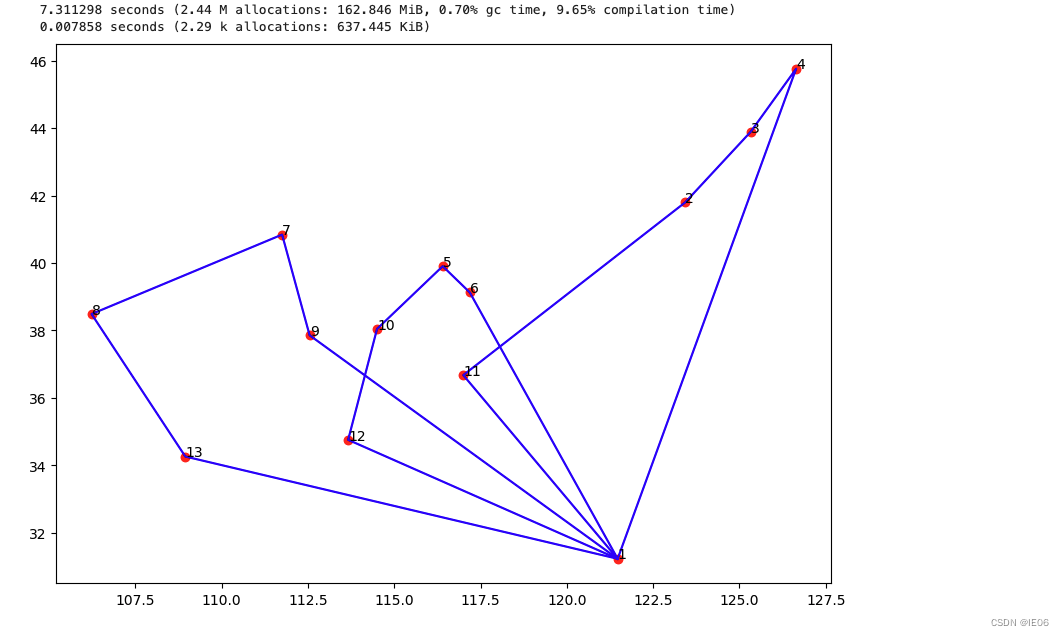
draw_vrp(x)

3. set-partitioning方法
方法很直观,把所有的子路径用TSP问题求解(使用Concorde库),然后用set-partitioning方法选择最合适的几条路线组合成VRP的结果。
using JuMP, HiGHS, Combinatorics, Concorde
k = 3
N = 13 #34
Q = 4 #13
function getRoutes(k,N,Q)
Qm = N-1-(k-1)*Q
route_dists = Dict()
# 求解所有子路径的最优解
for q in Qm:Q
for c in combinations(2:N,q)
c_index_tour,c_tour_length = Concorde.solve_tsp(floor.(Int,distmat[[1;c],[1;c]].*100))
c_tour = [1;c][c_index_tour]
route_dists[c_tour] = c_tour_length
end
end
route_dists
end
@time route_dists = getRoutes(k,N,Q);
CVRP = Model(HiGHS.Optimizer)
set_silent(CVRP)
routes = collect(keys(route_dists))
route_dists = collect(values(route_dists))
rn = length(routes)
@variable(CVRP,x[1:rn],Bin)
@objective(CVRP,Min, sum(x[i]*route_dists[i] for i in 1:rn))
a = zeros(Int,rn,N)
for i in 1:rn,j in routes[i];a[i,j]=1;end
for j in 2:N;@constraint(CVRP,sum(x[i]*a[i,j] for i in 1:rn)==1);end
@constraint(CVRP,sum(x)==k)
@time optimize!(CVRP)
rs = routes[findall(x->x>0.1,value.(x))]
plt.figure(figsize=(10,7))
plt.scatter(pos[1:N,1],pos[1:N,2],c="red")
for i in 1:N;plt.text(pos[i,1], pos[i,2], i);end
for r in rs
l = pos[[r;1],:]
PyPlot.plot(l[:,1], l[:,2], color="b")
end
4. 关于测试数据
测试案例可参考 http://vrp.atd-lab.inf.puc-rio.br/index.php/en/。
我们这里用的数据为:
pos = [121.472641 31.231707
123.429092 41.796768
125.324501 43.886841
126.642464 45.756966
116.405289 39.904987
117.190186 39.125595
111.75199 40.84149
106.23248 38.48644
112.549248 37.857014
114.502464 38.045475
117.000923 36.675808
113.665413 34.757977
108.948021 34.263161
114.298569 30.584354
118.76741 32.041546
117.283043 31.861191
112.982277 28.19409
115.892151 28.676493
120.15358 30.287458
119.306236 26.075302
113.28064 23.125177
121.520076 25.030724
110.19989 20.04422
108.320007 22.82402
106.504959 29.533155
102.71225 25.040609
106.713478 26.578342
104.065735 30.659462
103.83417 36.06138
101.77782 36.61729
91.1145 29.64415
87.61688 43.82663
114.16546 22.27534
113.54913 22.19875];
function dis(i,j)
A = pos[i,:];B = pos[j,:]
sqrt(sum((A-B).^2))
end
function drawTree(t,n)
plt.figure(figsize=(10,7))
plt.scatter(pos[1:n,1],pos[1:n,2],c="red")
for i in 1:n;plt.text(pos[i,1], pos[i,2], i);end
for i in 1:length(t)
l = pos[collect(t[i]),:]
PyPlot.plot(l[:,1], l[:,2], color="b")
end
end
function draw_vrp(x)
xv = value.(x)
t = []
for i in 1:size(x)[1],j in 1:size(x)[1]
if xv[i,j]>0.1;push!(t,(i,j));end
end
drawTree(t,size(x)[1])
end






![[职场] 提升学历考研再就业有必要吗 #其他#知识分享](https://img-blog.csdnimg.cn/img_convert/1b74445aafbd482c49e57b68add335b1.jpeg)